场景化毫米波特征选择和波束预测算法
2023-10-14孙长印梁有为王军选
孙长印,梁有为,江 帆,2,王军选,2
(1.西安邮电大学通信与信息工程学院 西安 710121;2.西安邮电大学陕西省信息通信网络及安全重点实验室 西安 710121)
在毫米波(millimeter wave, mmWave)通信系统中,使用大规模多输入多输出(massive multiple input multiple output, Massive MIMO)结合波束赋形(beamforming, BF)技术可提高空间自由度[1],实现mmWave 的定向远距传输[2]。由于基站(base station, BS)会发射大量定向窄波束[3],所以利用波束搜索技术使移动台(mobile station, MS)和BS 快速对准到最优波束是mmWave 通信技术的重要研究方向之一[4]。
目前,搜索精度最高的是mmWave 穷举搜索算法[3,5]。此类方案的缺点是随着波束数量变多,算法的开销会急剧增大,导致通信时延。为了解决此问题,现有mmWave 波束搜索方案研究主要从以下几个方向展开。文献[5-9]提出了基于固定码本的波束搜索算法,这类方案主要通过提前定义波束码本以降低搜索训练开销,搜索方法可使用穷举法搜索或分级搜索以减少搜索次数。为了提高搜索效率,文献[10-12] 提出了在双频通信系统中基于辅助信息和并行传输的波束搜索算法,利用Sub-6 GHz 频段和mmWave 频段的空间相关性,基于并行信道间的映射关系,实现了利用辅助信息减少mmWave 信道估计和波束训练开销。但是由于在实践中这种映射关系往往不是完美的双射,会导致搜索性能不佳,并且这类方案应用场景只局限于双频通信系统。文献[13-15]将机器学习引入波束搜索领域,利用深度神经网络(deep neural network,DNN)的分类预测能力完成波束训练,但针对特定场景训练DNN,使得方案泛化性能受限。文献[16-17]提出了基于压缩感知的波束搜索算法,利用mmWave 信道的稀疏性,使用压缩感知算法估计波达方向,算法计算复杂度高,应用范围有限。
与上述研究方向不同,本文考虑场景因素对mmWave 传输的影响,提出了一种基于场景化的特征选择和波束预测方案。本方案分为离线和在线两个阶段。首先,对于给定应用场景,在离线阶段选择特征波束构建特征波束集(波束索引的子集),并使用交叉验证确定特征波束集的大小,达到缩小波束搜索范围减少波束训练开销的目的。接下来考虑到场景化特征波束集与最优波束之间为隐式、非线性映射关系,采用了DNN 模型逼近该映射,从而减少在线阶段mmWave 信道估计和波束训练的开销。最后,使用场景化DNN 模型即可在线预测最优波束,完成波束搜索。
1 系统和信道模型
1.1 系统配置

图1 系统配置图

1.2 信道模型
本文采用mmWave 几何(物理)信道模型[18],该信道模型的优点在于它能够捕获信号传播的物理特性,包括对环境几何形状、材料、频带等的依赖性[18],这对于本文的场景化波束预测至关重要。基于此模型的mmWave 信道可以表示为:
式中,L为信道的多径数量;a(θl,φl)为阵列响应;αl、 τl、 θl、 φl分 别为第l条信道的路径增益(包括路径损耗)、延迟、到达俯仰角和到达方位角;TS为采样周期;D为循环前缀长度。假设最大延迟小于DTS。
1.3 码本构造
在模拟BF 中,大小为NCB×1的 BF 向量从大小为NCB×K的预定义量化码本矩阵F中得到,其中K是波束的总数量。因此,码本矩阵F=[f1,f2,···,将波束索引与天线阵列元素对应起来。
基于上述配置,对于三维空间中的任意方向(θk,φk),阵列响应矩阵可以表示为:

码本矩阵F的第k列即是第k束波束的BF 向量。如果令f∈CMmmW×1表示下行链路BF 向量,那么MS 处的接收信号可以表示为:
式中,hmmW(m¯)∈CMmmW×1表 示在第m¯个 子载波从基站的mmWave 阵列到MS 处的下行链路信道;BF 向量f选自码本F即f∈F, |F|=NCB。
2 特征选择和波束预测方案
本节论证依据功率损耗概率最小化准则选择场景化最优特征波束的合理性,作为算法的理论基础。然后给出了场景化特征选择和波束预测方案。
2.1 依据最优波束概率选择特征波束
波束特征是指波束所对应信道的某些特征。这些特征可以是接收信号的强度[19]或来自接入点信道的多径特征[20]。本文定义波束特征是给定位置处不同波束的接收功率。此外还需定义接收功率损耗,本文将波束最大接收功率与通过波束索引k选择的波束接收功率之比定义为功率损耗,功率损耗可以表示为:
式 中, γk=‖hk‖2是 索 引 为k的 波 束 接 收 功 率;是集合B中波束的最大接收功率,集合B由所有发射波束构成。集合S是特征波束集且S⊂B。接下来,功率损耗概率定义为对于某些阈值c≥1时,ξ >c的概率,即:
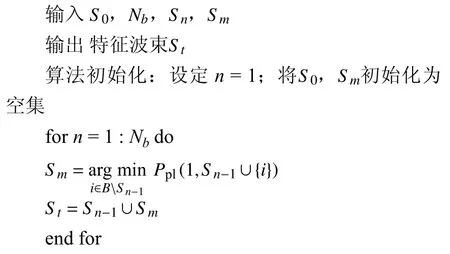
基于上述定义,选择特征波束的目标是最大化接收功率,该目标可以通过选择波束以最小化功率损耗概率Ppl(c=1,S)来实现。对于给定的训练预算Nb(即特征波束集大小),该问题可以公式化为子集选择问题,即:
式中, |S|=Nb, |S|表 示集合S的基数。问题(7)是一个子集选择问题,本质上是组合问题,通常很难解决,特别是当 |B|较大时将变得更难求解。不过根据Ppl(1,S)的构成,该问题存在一个有效的解决方法。

是一个模函数,那么由算法1 给出的贪婪解就是最优的,详见文献[21]。这是一个已知的结论,并已被多篇文献引用(详见文献[22])。
证明: 根据式(6)中功率损耗概率,当c=1 时,

因此,对任意的S⊂R⊂B以 及 ∀n∈BT,总是存在:
这即是模函数的定义[22-23]。
虽然算法1 能够直观有效的选择特征波束,但是使用贪婪搜索来解决最小化问题不够高效。为此,可以将最优波束概率定义为:
通过证明命题1 可以提出了一个更有效的特征选择解决方案。即,根据式(11),当i∈BSn-1时,最小化Ppl(1,Sn-1∪{i})等价于:
这意味着算法1 等价于将波束的最优波束概率降序排列,选择前Nb个波束即可完成特征波束集的构造。因此,该方案所需要训练的波束个数远小于 |B|。
算法1 mmWave 波束的贪婪搜索算法
2.2 特征波束集的离线生成
在本文2.1 节的基础上,本小节使用基于局部学习的特征选择聚类算法(local learning based clustering algorithm with feature selection, LLC-fs)计算最优波束概率[24],通过交叉验证确定特征波束集大小,获得场景化的特征波束集。假设将给定场景均匀划分为P个部分,MS 部署在这P处收集训练数据。假设发射波束码本集合B的维度为K,训练数据集T由P个K维接收功率向量组成,记作ri,i=1,2,···P。当MS 位于位置i时,BS 通过交替发射K个 波 束 生 成 接 收 向 量ri,i=1,2,···P。数据集T可以随机分为训练集Ptrain和 测试集Ptest,大小分别占数据集T的70%和30%。根据以下两个步骤获得场景化特征波束集。
1) 对K个场景化波束加权并排序
首先,在不考虑Ptrain中元素排列顺序的情况下,将所有元素以矩阵形式输入LLC-fs 算法。然后,LLC-fs 算法将根据最优波束概率降序输出K个波束的索引,将LLC-fs 算法输出的K维加权向量,记作z。
2) 生成场景化特征波束集
假设正整数Nb是特征波束集S的大小(Nb≤K),选择z的前Nb项即可生成特征波束集S。Nb可以通过交叉验证算法确定[25]。具体而言,令 μ表示波束搜索期望精度,令特征波束集S的初始大小为N0,使用S0训练生成的波束预测DNN 模型,并用与Ptest相 关的测试点计算DNN 预测精度 μ0,判断μ0是 否达到μ,并据此不断修改N0的大小,直到μ0=μ。算法2 总结了场景化特征波束集的产生过程,并在图2 中做了直观的展示。使用特征波束集离线训练波束预测DNN 模型的具体步骤将在2.3 节详细阐述。
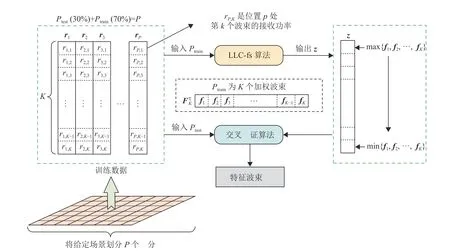
图2 特征波束集生成示意图
算法2 基于LLC-fs 的波束训练算法
输入 训练数据集T,期望精确度μ,即时精确度 μt,特征波束集大小Nb
输出 场景化特征波束集S和DNN 模型M
算法初始化:设定Nb= 1; μt=0;将数据集T随机分为两个子集,其中70% 用于训练集Ptrain和30% 用于为测试集Ptest
将Ptrain输入LLC-fs 算法,输出波束索引按降序排序的加权向量z
for μt= 0 : μ do
令St和Mt为即时特征波束集和即时DNN 模型,St由z的前Nb项组成。
利用St生 成给定应用场景的Mt, 并使用Ptest验证Mt预 测结果,得到即时精确度 μt。
Nb=Nb+ 1
S=St
M=Mt
end for
2.3 DNN 模型的离线训练和在线预测过程
根据本文第1 节中设定的系统和信道模型,下行可达速率可以表示为:

最优BF 向量f*为:
对于f的约束使得下行可达速率的优化问题是一个非凸问题,f*需要通过穷举搜索获得。然而,实现这样的搜索需要估计hmmW并且在线穷举波束训练,在应用Massive MIMO 技术后,这两者较大的训练开销都将难以接受。为了减少这些开销,本文将利用特征波束集离线训练场景化的DNN 模型在线预测最优BF 向量。
对于给定的环境,令 {xu}表示MSu位置的集合, {hmmW}和 {hfea}分别表示MSu与mmWave 天线阵列之间的信道和特征信道集合,其中 {hfea}由{hmmW}经过特征选择得到的。当MS 位置相同并采用大规模天线阵列时,可以认为 {xu}与 {hfea}和{hmmW}间存在双射映射函数[26-27],定义为:
那么接下来,可以将MS 位置与下行可达速率的映射函数定义为Ψ :
式 中,n是 码 本F的 索 引,n=1,2,···,|F|。 Ψ将mmWave 信道以及下行可达速率R与BF 向量f相结合起来。因此,结合式(19)和式(20)可以推导出mmWave 特征信道和下行可达速率之间存在映射关系 Γ:
利用特征波束集预测最优mmWave 波束的过程如下。
将BSA服务区域分为多个子区域,假设MS1进入或停留在BSA服务的子区Q,且子区Q的特征波束集SQ已获得。下面分别说明DNN模型的离线训练过程和在线预测过程。
1) DNN 模型的离线训练过程
首先要构建训练网络的数据集,使用本文第2.2 节所提方法生成场景化特征波束集S。其次,在每个相干时间内,通过下行链路导频估计mmWave 信道,并且对mmWave 下行链路进行穷举波束训练,记录每个BF 向量f对应的下行可达速 率。 令表 示MSu处所有码本波束的下行可达速率。于是,在每个相干时间数据点会被添加到数据集中。最后,利用构建的训练集训练DNN 模型直至收敛。基站通过该模型直接使用MS1的Nb个接收功率来预测最优mmWave 波束。
2) DNN 模型的在线预测过程
根据特征波束集产生过程可知,给定的应用场景可以由Nb个特征波束代表。在线波束预测阶段在收到通信请求后开始,MS1发送上行导频报告向BSA所处应用场景及位置。接下来,BSA选择MS1所处位置的场景化特征波束集S和DNN 模型,并激活属于S的Nb个波束来覆盖MS1,MS1将相应的Nb个接收功率向量记为y,并将y发送回BSA。在基站侧将y输入所属场景化的DNN 模型,输出用于服务MS1的最优波束索引kopt,至此在线阶段波束预测结束。这节省了与mmWave 穷举波束训练过程相关的所有训练开销。算法3 中总结了上述在线处理的过程。
算法3 基于在线波束预测算法
输入 场景化的特征波束集SQ和 DNN 模型MQ。
输出 最优波束索引kopt。
MS1发送上行导频报告向BSA所处位置。
BSA根据MS1所处位置,激活属于SQ的Nb个波束覆盖MS1。
MS1将接收到的Nb个接收功率向量记作y,并将其发送回BSA。
在基站一侧将y输入MQ。
输出预测的最优波束索引kopt。
BSA将kopt发送回MS1。
3 波束预测DNN 模型与参数设定
3.1 网络结构
深度学习模型通过离线训练具有逼近非平凡函数的能力,DNN 利用辅助信息预测最优mmWave波束的可行性已被证明[28]。对于本文的波束预测问题,特征波束集中的每个特征波束所对应的信道被映射到Nb个索引之一。这可以看作一个分类问题并利用DNN 卓越的分类预测能力解决。DNN 的任务是学习如何将特征波束接收功率向量映射到实值Nb维向量p中。因此,本文使用有单个输入层、多个隐藏层和单个输出层的多层感知器网络,该网络包含一系列非线性向量变换,如图3 所示。隐藏层选用ReLU 作为激活函数为神经网络引入非线性因素,在每一个隐含层后增加了Dropout 层,降低网络对单个神经元的依赖,确保正则化的同时避免过拟合,增强了泛化能力。所有全连接层具有相同的宽度,每层有MNN个神经元。
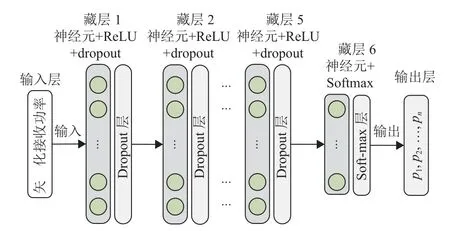
图3 波束预测DNN 示意图
在该神经网络中,预测任务的输出数量随着特征波束集的大小而不同,假设预测波束索引有Nb个波束选择,最后一层是具有Nb个神经元的全连接层,其将输入的多维波束特征向量映射到Nb维分类空间,并将映射输入到Softmax 层,通过计算输入向量中每个元素i的如下概率生成概率分布:
式中,tj是Nb维投影向量的第j个元素(SoftMax的输入);pi是第i个波束索引的预测概率。最后,概率最高的索引将是用于服务MS 的最优mmWave波束索引kopt。表1 总结了训练DNN 过程中的具体参数。
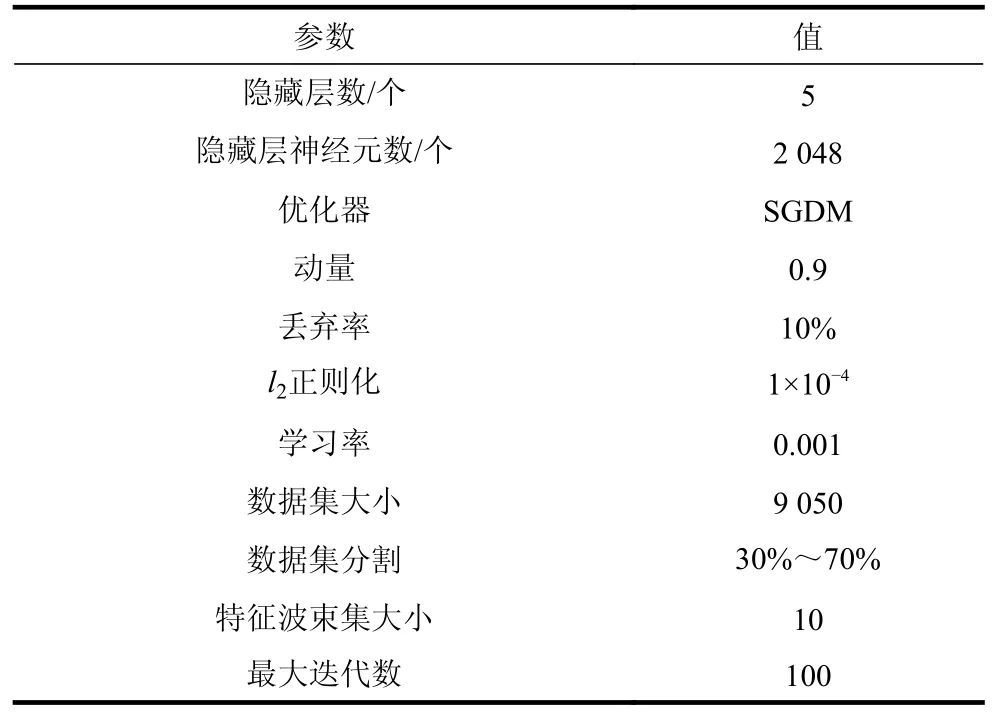
表1 深度神经网络配置参数
3.2 输入归一化及构建标签

式中ti=[t1,t2,···,tD]是 目标的独热向量;pi=[p1,p2,···,pD]是DNN 预测属于第i类的概率。
4 仿真结果与分析
4.1 仿真场景与参数设置
本文使用DeepMIMO 数据集的两个开源仿真场景[29],分别是28 Ghz 的室外环境“O1_28”和60 Ghz 的室内场景“I3_60”。图4 是“O1_28”的示意图,包含两条街道和一个十字路口。街道两侧共部署18 个基站(BS1- BS18),MS 位于在3 个均匀的x-y网格中。图5 是室内场景“I3_60”的示意图,是一个包含走廊的会议室。会议室内墙部署BS1和BS2。MS 位于在2 个均匀的x-y网格中,分别是视距(line of sight, LOS)传播网格和非视距(non line of sight, NLOS)传播网格。最后,所有MS 都配备了一个偶极子天线,其轴线与z方向对齐。本文设置了以下4 种场景来检验所提方案的性能。生成这4 种场景数据集所需参数如表2 所示,这4 种场景的基站天线数、OFDM 子载波数、OFDM 采样因子、天线间距和带宽均相同,分别为64、512、1、半波长和0.5 GHz。
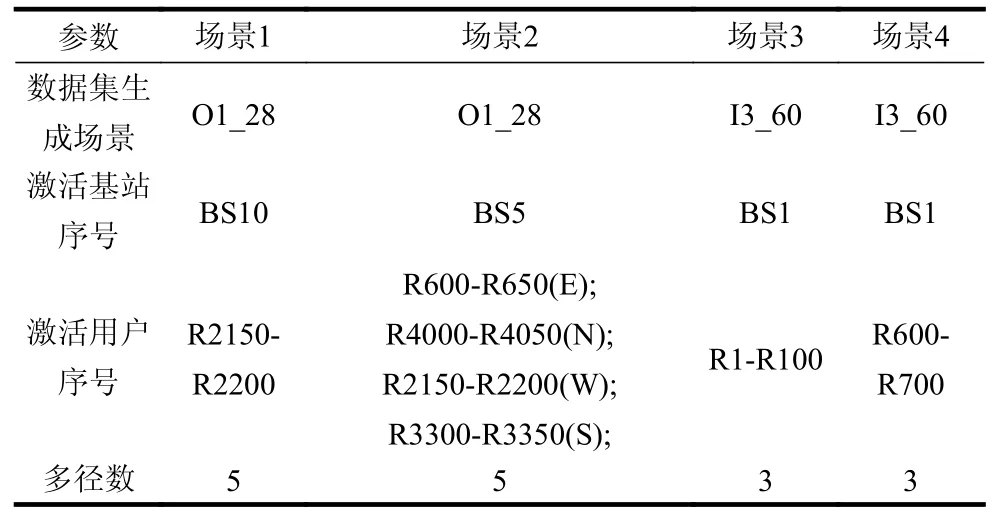
表2 DeepMIMO 数据集生成参数

图4 “O1_28”室外场景示意图

图5 “I3_60”室内场景示意图
室外场景1:主街道场景。模拟MS 和BS 都在西侧街道的情景。
室外场景2:交叉路口场景。模拟BS 部署在十字路口,MS 位于东西南北四侧街道上的情景。
室内LOS 场景3:室内视距传播场景。
室内NLOS 场景4:室内非视距传播场景。
4.2 性能评估指标
为了评估本文所提方案预测性能,采用预测最优波束的准确性作为性能指标。准确性分为精度Top-1 和Top-n两种主要性能指标。Top-1 精度定义为正确预测输入类别的频率,记作G1,可表示为:
4.3 波束预测性能
本文使用穷举波束训练得到的系统频谱效率作为性能上界(理论值),并将本方案的预测结果与系统上界进行对比。
表3 展示了在室外场景1 下,Top-1 和Top-3的准确率。如表所示,本文所提出方案可以明显对抗恶劣的噪声情况,具有较好的鲁棒性。如当SNR=-10 dB时,Top-3 准确率依然可以达到95.8%,并且当 SNR=0 dB时,该模型Top-1 和Top-3 准确率等于85.9%和97.0%。这表明经过特征选择后,少量的mmWave 波束训练也可以得到媲美穷举法的性能,即训练特征波束集中的10 个波束而不是扫描整个码本(本例中为64 个波束)。

表3 波束预测 Top-1和Top-3 准确率
为了验证所提方案在不同场景下的有效性,在图6a~图6d 中分别展示了室外场景1、室内LOS场景3 和室内NLOS 场景4 在不同信噪比下Top-1和Top-3 的频谱效率。为考察所提方案在同一室外环境不同子区的特征提取和波束预测性能,图6b同时考察了室外场景1 和室外场景2 的Top-1 性能,便于绘图起见,图6b 仅考察Top-1 准确率。

图6 不同场景波束预测性能图
从图6a~图6d 中可以看出,在不同场景下本方案Top-3 可达率几乎与上界一致,随着SNR 的提高,Top-1 和Top-3 频谱效率与上界的差距逐渐变小。并且当SNR ≥ -2 dB 后,图6a~图6d 的Top-1 可达率平均值比上界平均值分别小0.118 5、0.076 1 和0.201 3 bps/Hz。在图6b 中可以看出由于户外场景2 的各个子区距离基站较远,通信质量较差导致Top-1 准确率略低于室外场景1,但SNR≥ 0 dB 后,都具有较好的预测准确率。
4.4 特征波束集的大小对预测性能的影响
为了研究特征波束集的大小Nb对本方案预测性能的影响,在仅改变室外场景1 配置中Nb大小时,得到了不同Nb的Top-3 频谱效率,如图7 所示。

图7 Nb 对预测性能影响示意图
本例中码本包含64 个波束,当Nb= 5 时,Top-1 可达率平均值与上界平均值相差0.328 4 bps/Hz,预测性能较差。当Nb分别等于10、15、20 时,Top-1 可达率平均值比上界平均值分别少0.118 5、0.110 4、0.105 5 bps/Hz。可以发现随着Nb增大,Top-1 可达率逐渐增大并趋于稳定,从而也反映出本方案提取的特征波束是有效的。
5 结 束 语
本文提出了场景化mmWave 特征选择和波束搜索方案。在离线特征选择阶段,考虑通信的场景特征,利用LLC-fs 算法获得最优波束概率并生成特征波束集,再通过交叉验证确定特征波束集大小,从而缩小波束搜索的范围减少波束搜索的开销。为进一步减少在线mmWave 信道估计和穷举波束训练的开销,利用了DNN 模型逼近场景化特征波束集与最优波束之间为隐式、非线性的映射关系。在线波束预测阶段,根据MS 所处场景,在BS 侧将MS 的接收功率向量送入训练好的场景化DNN 模型,即可输出服务于MS 的最优波束索引,完成在线波束搜索。
仿真结果表明,在不同应用场景以及同一应用场景的不同位置,在本方案良好的预测性能基础上,能有效缩小波束搜索的开销。
