基于相对增益阵的多变量系统辅助解耦控制系统设计
2023-08-06许锋方劲舟王启航罗雄麟
许锋 方劲舟 王启航 罗雄麟
摘 要 由于多变量系统内部的耦合作用,采用单一的分散常规控制器已经很难达到好的控制品质,分散常规控制器不能实现解耦功能,而直接设计解耦器又存在诸多困难。针对这种情况,在分散常規控制器的基础之上,引入开环相对增益阵对多变量系统辅助控制器进行配对。依据控制系统的前馈控制原则,整定控制器参数,实现辅助控制器参数的设计。辅助控制器和主控制器共同作用,降低系统内部耦合,提高控制品质。
关键词 过程控制 多变量系统 解耦 相对增益阵 PID 辅助控制器
中图分类号 TP13 文献标识码 A 文章编号 1000-3932(2023)04-0411-08
单变量控制系统结构简单,控制器参数设计方便,在工业领域的控制理论和应用已经相当成熟。然而,随着工业过程的迅速发展,出现了大量的多变量系统,单变量控制系统已经很难满足工业控制的需要。在多变量系统中,各个变量之间存在相互影响、相互制约,即多变量系统中存在耦合作用。
随着多变量系统在工业生产方面的大量应用,需要研究的问题也相继突出。多变量系统的复杂计算和系统内部存在不可忽视的耦合作用,这些问题引起了许多学者的关注和研究。ROSENBROCK H H提出利用逆Nyquist矩阵使多变量系统开环传递函数对角优势化[1],使控制系统稳定。KHUEN H W等利用正Nyquist矩阵,提出了适合于多变量系统PID参数的自整定过程[2]。CHEN D和SEBORG D E提出在频域内基于Gershgorin带判据判断多变量系统对角优势化程度[3]。李旭等利用系统闭环传递函数的特征轨迹,设计出针对多变量系统的新解耦方法[4],这在多变量系统解耦的研究中起到了很大的促进作用。KOUVARITAKIS B和ROSSITER J A将自适应算法应用到多变量系统,该算法提高了多变量系统的稳定性[5]。WITTENMARK B实现了多变量系统的动态解耦,并在集散控制系统上得以实现[6]。RICHALET J等指出在实际工业中模型预测控制原理将在多变量系统中获得广泛应用[7]。
1966年,BRISTOL E H针对多变量系统的耦合作用,提出了相对增益阵(Relative Gain Array,RGA),对多变量系统耦合度进行评价,为控制系统变量配对提供了科学依据[8]。尼德林斯基指数(Niederlinski Index,NI)[9]也是一种适合寻找多变量系统内部变量配对的合适工具,可以和相对增益阵(RGA)配合使用。WITCHER M和MCAVOY T J提出了动态相对增益阵[10],可以对多变量系统动态和稳态的耦合程度进行测量,是很好的衡量多变量系统耦合度的性能指标。TUNG L S和EDGAR T F提出在状态空间和频率域内解决多变量系统的耦合性问题的方法[11]。XIONG Q等结合开环传递函数的增益和带宽特性[12],提出了有效相对增益阵。HE M J等考虑稳态和瞬态信息对多变量系统的影响,提出了相对正则化增益阵[13],将其作为评估多变量系统各回路耦合作用的指标。任丽红等提出了适用于多变量时滞系统的相对能量增益阵方法[14]。
分散常规控制器在低维控制系统中,因其参数设计简单、便于操作的特点,应用已经相当成熟,然而分散常规控制器本身不具备削弱多变量系统内部耦合度的作用,因此不能在多变量系统中广泛应用。集中控制器能全方位降低多变量系统内部的耦合作用,对多变量系统控制性能的提高起到了举足轻重的作用,但是集中控制器的设计颇为复杂,如多变量预测控制,计算量很大,设计成本也有所上升,难以实现和维护。
倘若在设计好的分散常规控制器的基础上添加解耦器,同样可以达到削弱系统内部耦合,实现良好控制品质的要求。因此笔者在对角主控制器的基础上,根据开环RGA选取剩余配对,设置辅助控制器进行解耦。主控制器和辅助控制器共同对多变量系统进行控制,降低了系统内部的耦合作用,有效提高了控制品质。
1 辅助常规控制系统设计方法
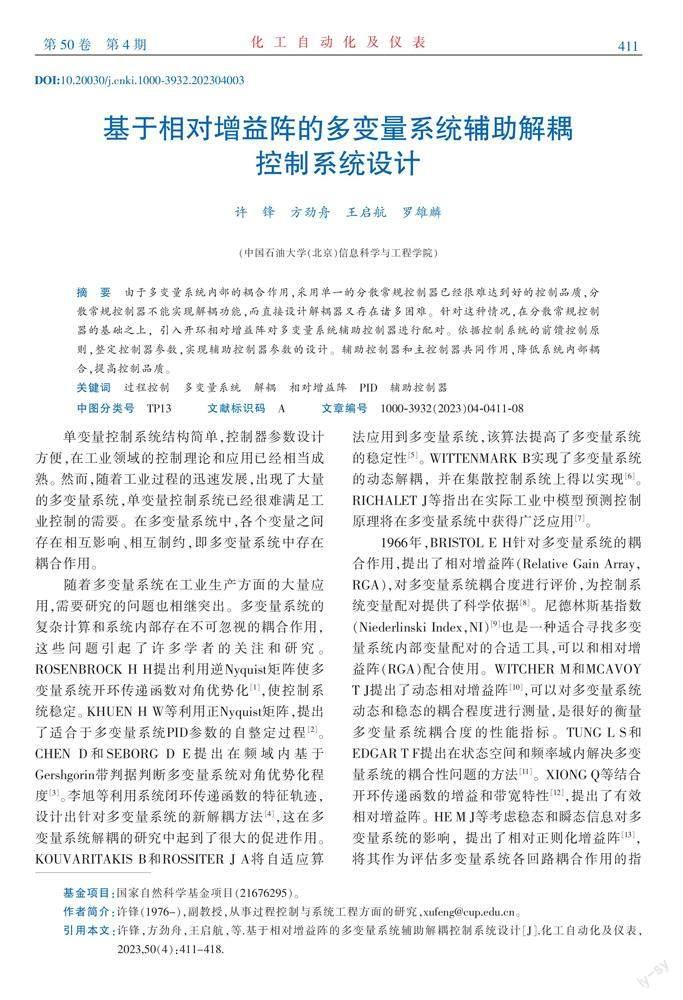
1.1 耦合度定义
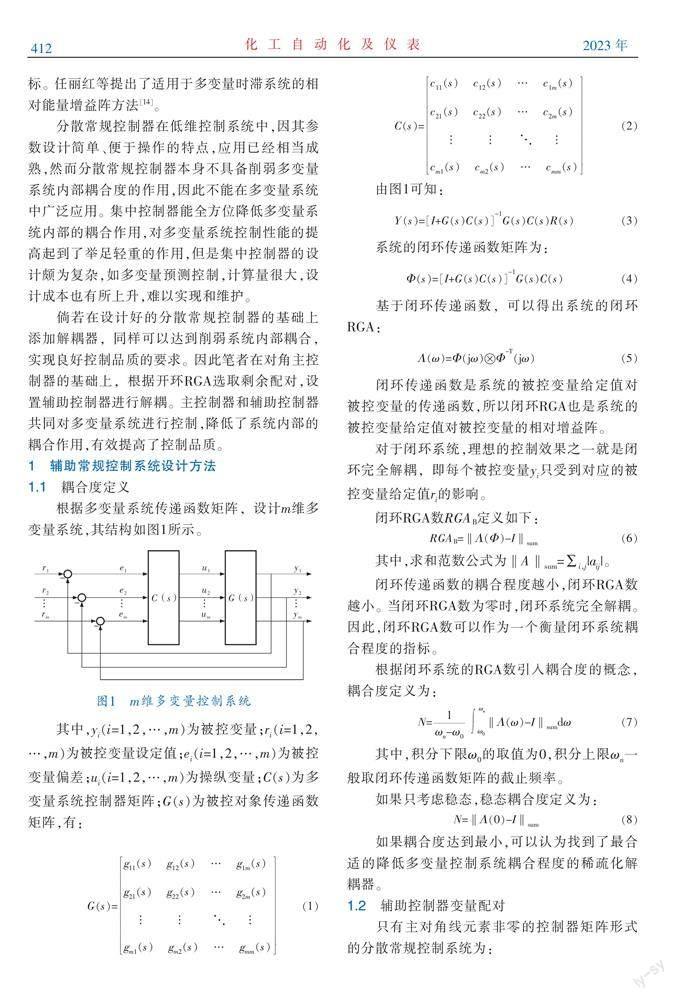
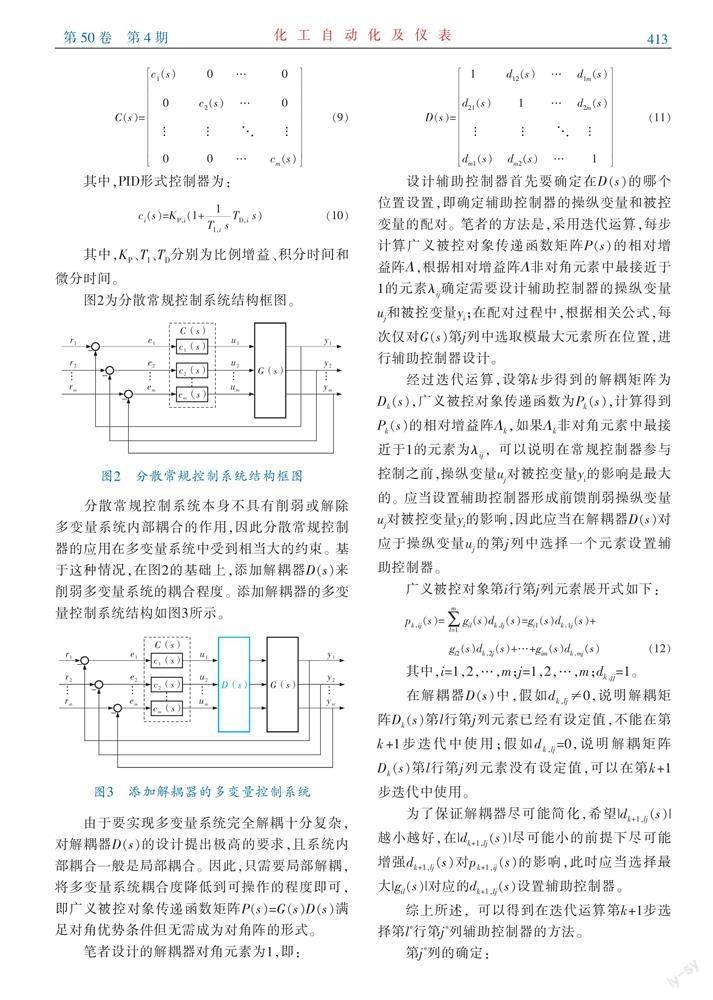
1.2 辅助控制器变量配对
1.3 辅助控制器参数整定
2 辅助控制器设计步骤
3 实例分析
4 结束语
多变量控制系统中一直存在不可忽略的耦合作用,然而分散常规控制系统不具备消除系统耦合的作用,因此分散常规控制系统在高维多变量系统中应用受到很大的局限,然而直接设计动态解耦器对控制器设计的要求非常高,且成本昂贵。
针对以上问题,笔者基于相对增益阵引出了耦合度的概念,在分散常规控制器的基础上,设计解耦器。通过相对增益阵在频域内的变量配对原则,在必要的位置添加辅助控制器,选用RGA作为衡量变量配对优劣的性能指标。反复迭代计算和采用耦合度衡量每一步解耦程度,完成多变量系统解耦的过程,从而实现了稀疏化控制。该设计方法很好地削弱了系统内部的耦合作用,提高了系统的控制性能。并把该方法的仿真结果与集中控制系统和分散常规控制系统的仿真结果做了对比,结果表明,笔者提出的辅助常规控制系统以消除耦合作用为目的,控制性能与集中控制系统的相近,远优于分散常规控制系统,且该方法的设计大幅简化了控制器的设计难度。
参 考 文 献
[1] ROSENBROCK H H. Design of multivariable control systems using the inverse Nyquist array[J]. Proceedings of the Institution of Electrical Engineers,1969,116(11):1929-1936.
[2] KHUEN H W,HENG L T,XU W. The direct Nyquist array design of PID controllers[J]. IEEE Transaction on Industrial Electronics,2000,47(1):175-185.
[3] CHEN D, SEBORG D E. Multiloop PI/PID controller design based on Gershgorin bands[J]. IEE Proceed-ings Control Theory and Applications,2002,149(1):68-73.
[4] 李旭,张殿华,周娜,等.特征轨迹法解耦活套高度和张力控制系统[J]. 信息与控制,2005,34(6):665-668.
[5] KOUVARITAKIS B, ROSSITER J A. Multivariable Nyquist self-tuning:A general approach[J]. IEE Proceedings D-Control Theory and Applications,2006,136(5):189-202.
[6] WITTENMARK B. Adaptive decoupling of multivaria-ble systems[J].International Journal of Control,1986,46(6):1993-2009.
[7] RICHALET J,RAULT A,TESTUD J,et al.Model pre-dictive heuristic control:Applications to an Industrial Process[J].Automatica,1978:413-428.
[8] BRISTOL E H.On a new measure of interaction for multivariable process control[J].IEEE Transactions Automatic Control,1966,11(1):133-134.
[9] NIEDERLINSKI A.A Heuristic Approach to the Des-ign of Linear Multivariable Control Systems[J].Auto-matica,1971,7(7):691-701.
[10] WITCHER M,MCAVOY T J.Interacting control systems:Steady state and dynamic measurement of interaction[J].ISA Transaction,1977,16(3):83-90.
[11] TUNG L S,EDGAR T F.Analysis of control-output interaction in dynamic systems[J].AICHE Journal,1981,27(4):690-693.
[12] XIONG Q,CAI W J,HE M J.A practical loop pairing criterion for multivariable process[J]. Journal of Process Control,2005,15(7):741-747.
[13] HE M J,CAI W J,NI W,et al. RNGA based control system configuration for multivariable process[J]. Journal of Process Control,2009,19(7):1036-1042.
[14] 任麗红,刘雨波,罗雄麟,等.多变量时滞系统的关联分析与变量配对[J].化工自动化及仪表,2012,39(6):743-746.
(收稿日期:2022-11-01,修回日期:2023-06-13)
Ancillary Decoupling Control System for Multivariable Systems
Based on Relative Gain Array
XU Feng, FANG Jin-zhou, WANG Qi-hang, LUO Xiong-lin
(College of Information Science and Engineering, China University of Petroleum (Beijing) )
Abstract Considering the coupling action within multivariable system, conventional and single decentralized PID controller becomes difficult to achieve good control quality. The decentralized controllers fail to realize decoupling function and it is difficult to design a decoupler directly. Based on the decentralized PID control system, having the open-loop relative gain array adopted for matching with the ancillary controller was implemented. Basing on the feed-forward control principle, the parameters of the ancillary controller were adjusted and the ancillary controller and the primary controller work together to reduce coupling degree in the system and improve control quality of the multivariable system.
Key words process control, multivariable system, decoupling, relative gain array, PID, ancillary controller
