地表振动传感器质量对水平耦合谐频的影响∗
2023-07-13靳伯骜崔希望吴猛猛
靳伯骜 高 艳 崔希望 吴猛猛
(1 中国科学院声学研究所 噪声与振动重点实验室 北京 100190)
(2 中国科学院大学 北京 100049)
(3 北京信息科技大学仪器科学与光电工程学院 北京 100192)
(4 海军潜艇学院 青岛 266199)
0 引言
剪切波振声探测法可用于探测浅埋物体。该方法使用水平振源在地表激励剪切波,通过传感器阵列采集地表振动信号,由此反演地下空间的声阻抗的分布情况[1−2]。探测应用中,传感器通过尾锥等固定工装与地表连接。然而由于土壤质地松软,这一环节会发生耦合谐振,使得传感器在谐频附近与地表不再同相振动,导致信号的相位失真。这限制了所采信号的有效频段,阻碍了探测分辨率的提升[3]。因此有必要深入研究耦合谐振频率的影响因素,为振声探测法的改进提供指导。
前人工作表明,影响耦合谐振频率的因素包括:固定工装的结构、传感器放置角度、传感器附加质量以及土质等[4]。其中,工装长度受到了广泛关注。1984年,Krohn[5]开展的外场实验表明,工装越长,耦合谐振频率越高。更长的工装虽能提升耦合强度,但也会影响信号采集。徐锦玺等[6]使用长为0.1∼1.0 m的5组工装开展了外场测试,发现过长的工装类似于空间中的滑动平均滤波器,会压制高频信号的灵敏度。因此,过长或过短的工装均会影响信号采集系统的可用频段。
除了固定工装的长度,传感器质量对耦合谐振频率也存在影响。Jin等[7]开展的有限元仿真表明,相同条件下传感器质量越小,耦合谐振频率越高。随着传感器技术的高速发展,一些振动传感器的质量可轻至数克。然而传感器技术指标的提升并不一定能保证实测结果的改善[8]。轻质传感器能否提升耦合谐振频率仍有待实验验证。
本文针对地表处水平方向的振动信号采集问题,通过实验与仿真对比了不同质量的传感器的本地振动的频响特性。使用集总参数模型对传感器工装土耦合振动系统进行定性分析;仿真对比了质量为2∼250 g 情况下传感器的本地振动的频响特性;使用动圈式水平振源在季节性的冻土地表开展了外场对比实验与横波波速测量实验。在实际工况下测试了质量为250 g 的传感器的谐振频率上限,并验证了质量为2 g 的轻质传感器的信号采集性能,为实际应用中的传感器选型提供参考。
1 水平传感器耦合谐振模型
采集地表振动信号时,地震检波器或加速度计单元须安装于工装之上,如图1 所示。图中工装周围的土壤被等效为一个弹簧-质量块系统,周围土壤、工装与传感器的质量分别记为m0、mb与m;me=m+mb,为传感器与工装的质量总和。土壤与工装之间的水平方向的等效刚度记为Ke,粘接层的复合剪切刚度记为Km,周围土壤的水平位移记为u0,传感器的本地水平位移记为ua。
传感器单元与工装之间的剪切安装谐振频率使用以下公式估算[9]:
其中,粘接层的复合剪切刚度Km与粘接层的材料和几何参数有关。在机械振动与冲击测试中,传感器安装于坚硬的金属表面,安装谐振频率可达数千至数十千赫兹。然而在埋地物体探测相关应用中,通常关注1 kHz 以下的地表振动信号,这种情况下传感器与工装可视为一个整体。
由图1可知,除安装谐振频率外,还存在工装与土壤的耦合谐振频率,使用以下公式计算:
与金属相比,土壤质地松软,使得fc ≪fs[5,9]。为了保证所采信号相位信息的准确,实际可用的信号频段需要远小于fc。
这里需要指明,实际测试过程中,工装与土壤的边界条件十分复杂。在本节的分析过程中,耦合振动系统中的土壤被简化为等效质量和等效刚度,以便分析。
2 水平振动信号采集系统的仿真分析
为分析传感器质量对耦合谐振频率的影响,使用有限元法对振动激励系统与信号采集系统进行仿真。仿真模型与坐标系(x,y,z)如图2所示。仿真中土壤的半径为14 cm,外部被完美匹配层包裹,以此模拟外场实验场景。地表水平振源由一个铝杆和动圈式电磁激振器构成,其中电磁激振器由质量块与弹簧表示,电磁激振器质量块的振动位移以us表示,电磁力F施加于激振器质量块上,方向平行于y轴。传感器与铝质工装位于x轴上,与原点O的距离为5 cm,工装的埋地深度为4 cm。传感器的本地位移以ua表示。模型中的材料参数如表1 所示,其中土壤的参数来自文献[10]。
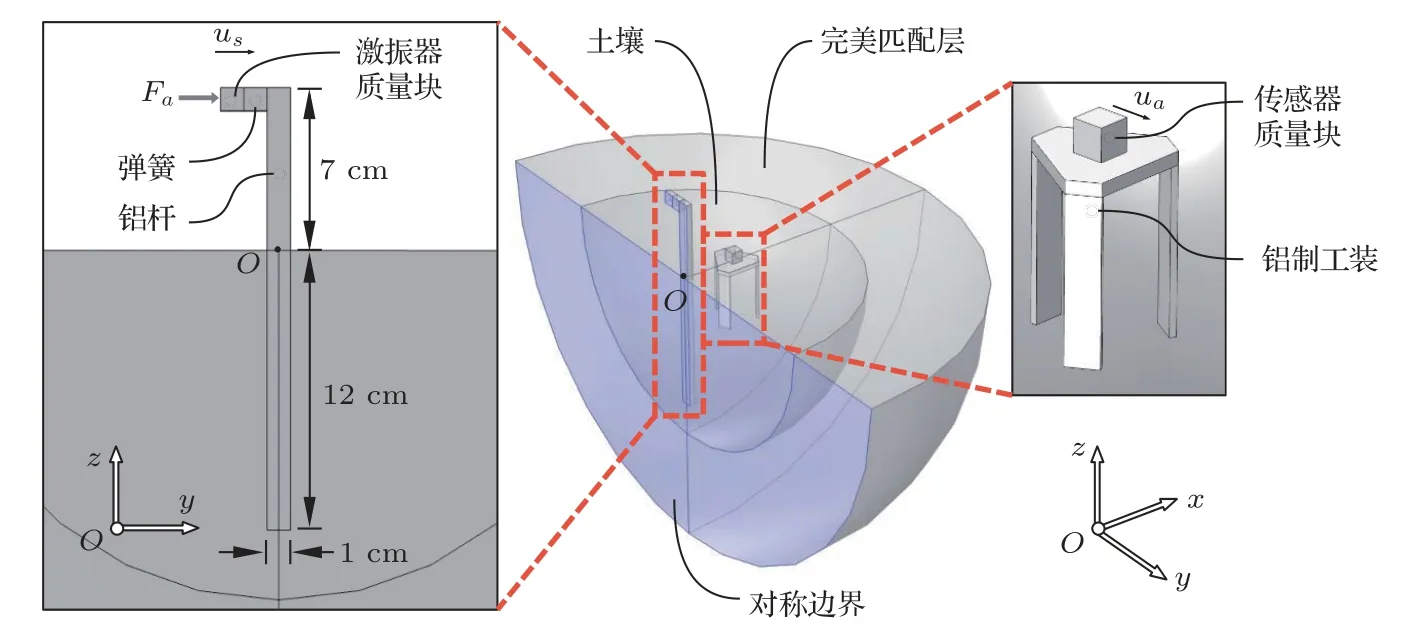
图2 仿真模型Fig.2 The finite element model
图2 中,弹簧与质量块的形状均为边长为1 cm的立方体。依据表1 的参数,激振器质量块的质量为57.6 g,弹簧的劲度系数为1.35×104N·m−1,传感器质量记为m。仿真中,水平振源、土壤以及传感器耦合工装构成了一个线性系统,简谐外力作为输入量施加于振源质量块上。这一线性系统可分为杆状水平振源与信号采集系统两部分。其中,归一化位移ua/us能够反映该系统的频率响应特性。
为了研究m对信号采集的影响,对比了频域仿真中m取不同值的情况下,ua/us的幅值与相位随频率的变化关系,绘制于图3。当m=0 g 时,只有传感器工装固定于地表,其尺寸小于波长且密度与土壤接近,这使得信号采集系统对ua的影响很小,ua与该点处土壤的水平振动位移一致。在图3(a)中,m=0 g 所对应的曲线在700 Hz 附近出现了共振峰,而图3(b)中,m=0 g所对应的曲线在该频率出现了相位的跃变,这表明仿真中振源在700 Hz 附近发生共振。

图3 频域仿真中,不同的加速度计质量m 对ua/us 的影响Fig.3 Effect of different accelerometer masses m on ua/us in frequency domain simulations
如图3(a)和图3(b)所示,m=2 g 与m=0 g所对应的曲线在0∼1200 Hz 内十分接近,这表明质量为2 g 的传感器能够保证振动信号的幅度与相位信息的准确性。m=25 g 与m=250 g 所对应的曲线与m=0 g 的曲线存在较为明显的差异,其中,m=250 g 所对应的曲线在300 Hz 以上频段与其他曲线明显不同。这是由于m=250 g 时传感器质量过高,使得传感器-工装-土所构成的耦合共振频率下降,从而影响了线性系统的频率响应特性。图3(b)中700 Hz 附近,m=250 g 与m=0 g 的相位差接近π,表明地表振动位移与传感器本地振动位移的相位相反,m=250 g 传感器耦合谐振频率在700 Hz附近。对于质量为2 g与25 g的传感器而言,其所对应的耦合谐振频率高于1200 Hz。
本节仿真结果表明,在长度为4 cm 的工装固定下,质量为250 g 的传感器的耦合谐振频率约为700 Hz。实际应用中,传感器的质量由数克至数百克不等。以最常见的SM-24单元(Input/Output,Inc.)为例,其质量达到74 g,加上塑料外壳后传感器的质量将更高。如果使用该单元组装三轴地震检波器,传感器质量将轻易超过250 g。有鉴于此,在搭建信号采集系统时应根据信号频段要求对所用传感器的质量进行筛选。
3 水平耦合谐振频率对比实验
有两种实验方案可用于对比传感器的耦合谐振频率:第一种方案,将传感器安装于沙箱中,使用振动台激励沙箱[4];第二种方案,将传感器安装于土壤地表,使用力锤或落锤激励传感器或地表[5−8]。Krohn[5]在实验研究中发现,沙箱固有的振动模式会影响测试结果,且难以消除,因此本文将传感器安装于地表。
为了有效地对比传感器耦合强度,需要产生可控或已知的振动,从而控制与激励相关的变量。一些工作中使用力锤或检波器单元直接激励传感器,根据线性系统的传递函数来评估耦合强度[11−12]。然而这种激励方式与实际测试情况不同。为了贴近实际工况,本文使用地表水平振源激励传感器附近的地表,以此作为可控的激励源,与第2节仿真模型相同。
3.1 实验描述
实验地点位于中国科学院声学研究所院内的绿地,实验时间为1 月末,场地地表已经上冻。实验所用设备可分为地表振动激励系统与信号采集系统两部分,如图4 所示。地表激励系统中,使用上位机产生激励信号,该信号经由声频功率放大器放大后馈给动圈式电磁激振器(4 Ω,15 W)。激振器的磁芯质量为57.6 g,谐振频率为82.8 Hz,安装在铝杆的顶端。铝杆宽度1 cm,埋地深度19 cm,露出于地表的长度为7 cm。信号采集系统中,加速度计通过铝制工装与地表连接,工装埋地部分为4 cm。由于冻土层的存在,铝制工装与地表结合十分紧密。实验中使用了两种加速度计,其型号分别为:LC0161-2 三轴加速度计(简记为LC0161,质量为250 g),PCB353-b15(简记为PCB353,质量为2 g)。实验使用了北京阿尔泰科技发展有限公司生产的USB8814数据采集卡。
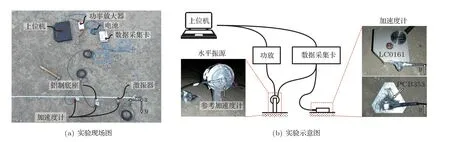
图4 水平振动信号采集实验现场图与示意图Fig.4 The picture and schematic diagram of the horizontal vibration signal acquisition experiment
实验过程中,电磁激振器在y轴方向进行激励;传感器轴向与y轴平行,布放于x轴上。为了监测振源的振动情况,在激振器的磁芯外壳上安装了参考加速度计,如图4(b)所示。
3.2 针对传感器质量的对比实验
为了对比传感器质量对水平耦合谐振频率的影响,使用了LC0161 与PCB353 两种不同质量的加速度计,在相同条件下进行了两组实验,如图5所示。两组实验中,测点与振源的距离均为25 cm,并在该位置插入三齿的铝制工装。实验1 中,LC0161通过螺钉与铝制工装连接,如图4(b)所示。实验2中,将PCB353 通过双面胶与铝制胶带安装于铝制工装上,以此采集m=2 g时的本地加速度。

图5 实验1 与实验2 的示意图Fig.5 The diagram of the Experiment 1 and Experiment 2
初步实验表明,激振器、功率放大器以及土壤均存在不同程度的非线性行为,因此使用不同频率的正弦信号进行激励,激励频率为25∼1600 Hz,步长25 Hz,单频信号持续时间为4 s。与仿真部分相同,激振器磁芯位移与传感器本地位移分别记为us与ua,所对应的加速度记为¨us与¨ua。为了消除功放与激振器的频响特性的影响,对比了两组实验中¨ua/¨us的幅度与相位差,分别绘制于图6。
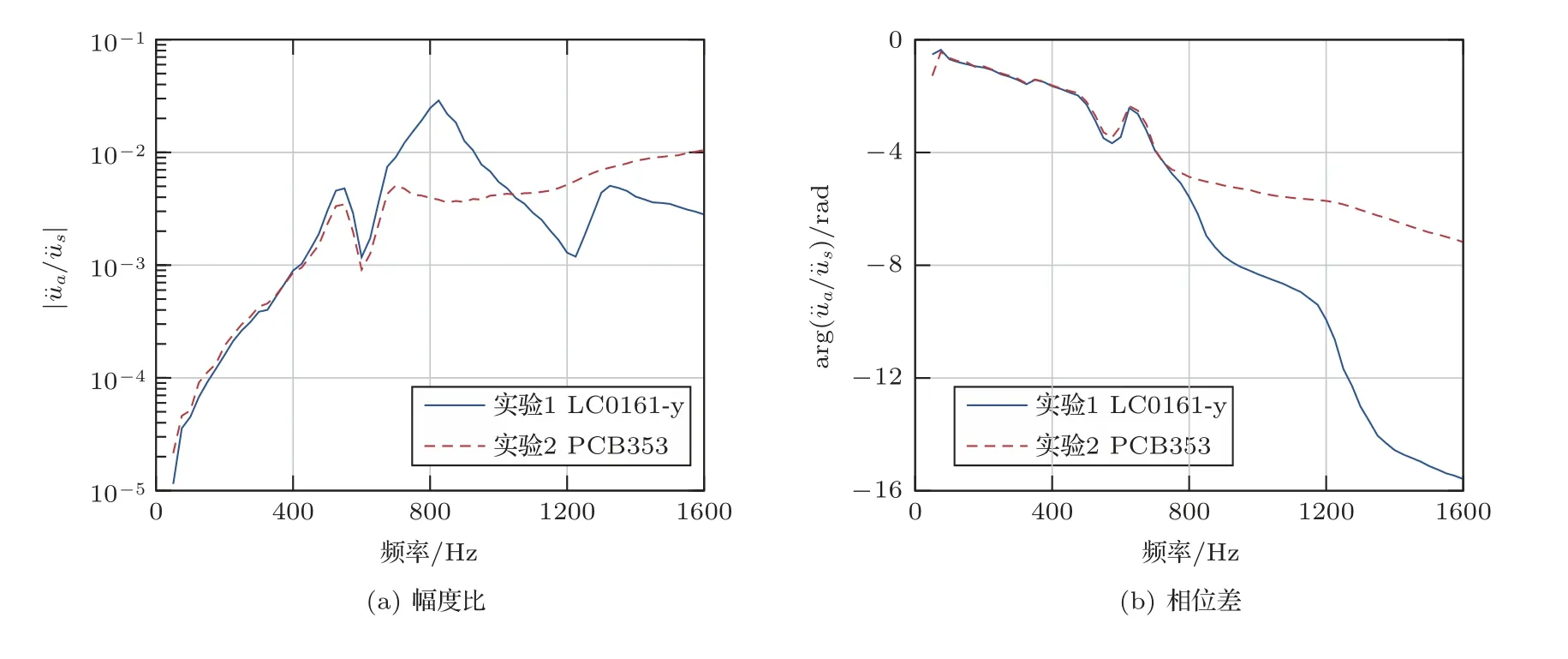
图6 实验1 与实验2 中,x=25 cm 处加速度计与参考加速度计的幅度比与相位差Fig.6 Amplitude ratio and phase difference between the accelerometer at x=25 cm and the reference accelerometer in Experiment 1 and Experiment 2
图6(a)中,LC0161 的幅度比在800 Hz 处明显凸出,此外,图6(b)中LC0161的相位谱在800 Hz处陡然下降,这些现象表明LC0161 的耦合谐振频率约为800 Hz。实际应用中,若使用LC0161 采集高于800 Hz 的信号,需要使用更长的尾锥进行固定。考虑到实验场地地表为冻土,其剪切模量远大于非冻土情况[13]。因此,非冻土情况下土壤与工装之间的等效水平刚度Ke更低,其耦合谐振频率将低于800 Hz。
图6(a)中所有谱线在600 Hz 附近均出现类似共振峰的形状,该共振峰与图3(a)中的共振峰出现的频率较为接近,需结合实验中的现象进行分析。在单频激励实验过程中,当激励频率小于550 Hz 时,现场均无显著可听声。但当激励频率超过550 Hz时,激振器发出十分显著的可听声。自750 Hz起,可听声的强度随激励频率增加而减小。这表明振源在600 Hz 附近发生共振,致使图6 中各曲线在600 Hz附近发生波动。
图6(a)中,实验2 中PCB353 的幅度比在800 Hz 处并未提高,而且相位差在800∼1600 Hz频段内近乎线性变化。这与实验1 中LC0161 的结果显著不同,说明实验2 中PCB353 的耦合谐振频率高于800 Hz。
4 横波波速测量实验
横波波速测量实验的振动激励与信号采集方式与振声探测法相同,且只需要两个传感器,比振声探测法更易于实现。因此本文通过开展横波波速测量实验,以此来验证信号采集系统与振动激励系统的可用频段。该实验利用与振源距离不同的两个测点所采信号的相位差估计直达波波速。若相位差随频率线性变化,则表明两个传感器采集到了模式单一且非色散的行波信号。
前文中的对比实验结果表明,质量为2 g 的传感器的高频采集能力更优。因此实验中使用2 个PCB353加速度计与相同的铝质工装进行了地表横波波速测量实验。这2 个传感器的测点与水平振源的距离分别为5 cm 与25 cm。单频激励下,这一对传感器的输出信号的相位差绘制于图7。
由图7可知,在100∼500 Hz频段内相位差与频率呈线性关系,表明两个测点接收到了单一模式的行波信号。结合地表水平振源的辐射特性可知,100∼500 Hz 频段所采信号应与水平横波相关。对该频段的数据进行回归分析,依据曲线斜率计算得到横波波速约为480 m·s−1。
在非冻土情况下,地表附近的横波波速介于100∼200 m·s−1,与本文测量结果相差较大。这是由于场地地表上冻所致。本文实验中,外场最高温度连续多天低于−2◦C,且地表干燥。这种条件下,土壤中的水发生相变形成孔隙冰,继而发展形成冰骨架,对土壤介质的弹性模量产生十分显著的影响[14]。实验室的测量结果表明,冻土中横波波速受到土壤材质、含水量、与温度的影响,介于500∼2000 m·s−1之间[13−15]。因此,实验中横波波速高于以往实验结果的原因是地表附近出现了季节性冻土,其剪切模量高于夏季的土壤。
5 结论
在使用振声法探测埋地物体的过程中,由于表层土壤松软,传感器耦合环节会发生谐振。本文针对传感器质量对耦合谐振频率的影响,开展了仿真与实验研究,得到以下结论:
(1) 传感器质量对地表水平振动信号的采集存在影响。仿真结果表明,相同耦合工装固定下,传感器质量的增加会导致耦合谐振频率的降低,从而限制信号采集系统的可用频段。
(2) 实验结果表明,在相同情况下,质量为2 g 的加速度计的耦合谐振频率高于250 g 加速度计;当传感器质量为250 g 时耦合谐振频率不超过800 Hz。
(3) 本文所用的水平激励系统与信号采集系统能够用于测量100∼500 Hz频段的横波波速。
(4) 文中所用的水平振源在600 Hz 处发生共振。为了进一步提高探测系统的分辨率,后续工作需要进一步改进振源结构,以提高振源与土壤的耦合谐振频率。
