卷积神经网络主动目标方位估计
2023-07-13王珍珠任群言
王珍珠 赵 猛 任群言 肖 旭 马 力
(1 中国科学院声学研究所 北京 100190)
(2 中国科学院大学 北京 100049)
0 引言
目标定位是当前环境感知、目标监测等海洋应用领域的关注热点,对我国声呐设备部署有重大意义[1]。传统的定位方法主要是基于匹配场处理(Matched field processing,MFP),主要是使用与测量场高度相似的拷贝场来定位声源的深度、距离和方位,1976 年,Bucker[2]就将线性MFP 应用到声源定位中;1988 年,Baggeroer[3]在分层海洋环境中利用高分辨率波束形成方法对MFP 进行改进,但当估计相关目标信号时,方位估计性能会下降。MFP克服了传统的平面波波束形成技术在信道多途条件下的不足,能够获得接近理想的阵处理增益。然而,这种技术需要长线阵列以高分辨率估计目标波达角,且环境参数通常是变化的,难以获得真实环境的完整知识,这可能会导致不正确或不准确的定位结果。传统的阵列信号处理技术难以应付复杂海洋环境下面对的问题。
近些年来,为了从声学数据中提取信息,深度学习以多种方式在目标定位中得到了广泛的应用。深度学习具有强大的特征提取能力和高效处理复杂、高纬度、独特的非线性映射等特性,可以大大增强声呐信号处理性能,根据所提供的用于学习的样本数据和标签,利用深度学习的“深层”特征提取优势,可以获得蕴含目标特征的高阶特征量,实现复杂海洋环境下的水下目标定位。1991年,Steinberg 等[4]就利用单层神经网络实现了均匀介质中声源定位。2017 年,Niu 等[5−6]将前馈神经网络(Feed forward neural networks,FNN)、支持向量机(Support vector machine,SVM)和随机森林(Random forest,RF)应用到了声源测距上,估计性能都优于传统的匹配场方法。2018 年,Wang 等[7]用基于广义回归神经网络(Generalized regression neural network,GRNN)实现了较为精确的声源定位;卷积神经网络(Convolutional neural networks,CNN)可以高效处理复杂、高纬度矩阵,目前也被应用于多种场景下。2018 年,Huang 等[8]利用CNNFNN 网络模型在浅海环境下实现了声源定位,在海洋环境波动的情况下也具有较好的稳健性。2019年,Elbir[9]设计了一种CNN与多重信号分类(Multiple signal classification,MUSIC)算法结合的信号方位估计框架估计信号方位。2020 年,Yao 等[10]提出了一种基于递归神经网络的目标波达方位角(Direction of arrival,DOA)估计模型,该模型借助于Toeplitz 矩阵重构,可以对未知信号源的信号进行DOA 估计。2020 年,Zhu 等[11]提出在不同条件下训练5 个CNN,每个CNN 从空间协方差矩阵的实部和虚部学习方向图像。计算每个CNN 的预测结果作为平均值,以获得最终的DOA 估计结果。2021年,Liu等[12]根据阵列元素的数量设计了多个CNN,并使用包含实数和虚数的协方差矩阵进行训练。经过大量的数据学习,该方法能够有效地识别水声信号的方向。2021 年,曹怀刚[13]提出了一种利用单矢量传感器进行DOA 估计的深度学习模型,利用CNN 实现了多目标分辨;2021 年,姚琦海等[14]得到在已知海洋环境参数的条件下,GRNN、CNN 和MFP 三种方法对宽带声源的估计性能均优于窄带。本文在以往研究的启发下,尝试将CNN引入到主动目标方位估计中。
本文研究了基于CNN 分类模型的DOA 估计,将阵列接收信号的常规波束形成(Conventional beamforming,CBF)功率作为神经网络的输入,进行训练和测试。第1 节讨论了本文所用CNN 网络模型结构和输入数据的预处理;第2 节给出仿真参数设置,评估了不同信噪比(Signal noise ratio,SNR)下的鲁棒性;并评估了神经网络的加入与CBF、最大信噪比准则(Max signal-to-noise-ratio,MSNR)、最小方差无失真响应(Minimum variance distortionless response,MVDR)波束形成方法的性能差异;第3节为结论。
1 基于CNN的分类模型
1.1 CNN介绍
本文所用网络模型结构如图1 所示。设置了4层卷积层、3 层全连接层(含输出层),4 层卷积层的核均为3×3,滤波器个数分别为2、4、8、8,其中两层核均为2×2 的池化层分别被加到了第一层卷积层后和第四层卷积层后,两层全连接层神经元个数分别为256 和512。引入“keep dropout”正则化策略加入到CNN 里,分别加到了第二层卷积层之后和第二层全连接层之后,第二层卷积层之后dropout的概率为0.2,第二层全连接层之后dropout 的概率为0.5。所有卷积层的激活函数都选用修正线性单元(ReLU),输出层激活函数为多分类问题的Softmax 函数,损失函数选择交叉熵损失。优化方法选择Adam,相关参数根据计算机性能设置[15]如表1所示。

图1 CNN 分类网络模型Fig.1 CNN classification network model
1.2 数据预处理
从阵列信号处理角度看,线列阵接收到的数据包含目标方位信息,通过CBF,对阵元接收数据进行频域均匀加权处理,输出信息为波束响应数据,维度与频率点数和阵元接收数据维度有关,标签数据为对应角度信息,以此作为数据集输入网络。以上描述的数据预处理过程如图2所示。
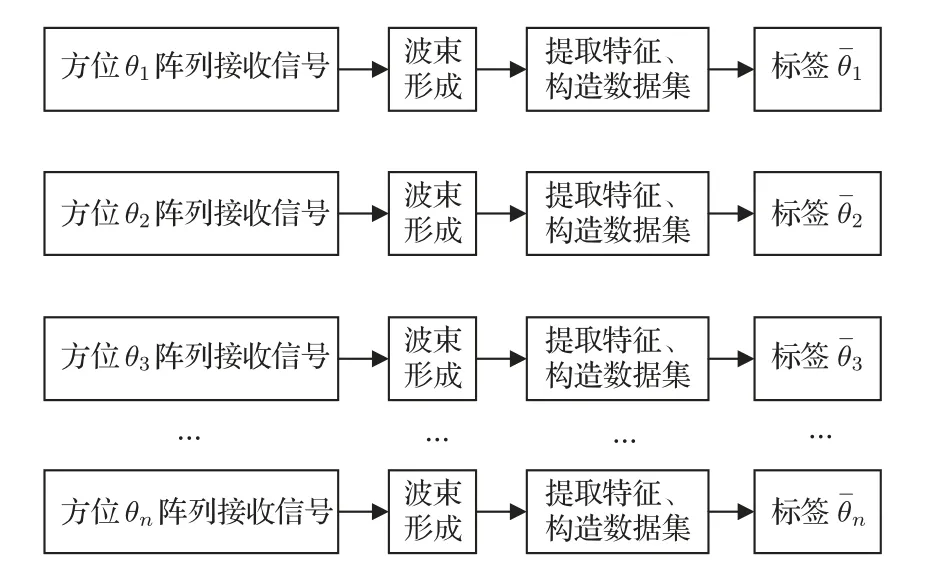
图2 数据预处理流程Fig.2 Data preprocessing process
1.2.1 训练和测试数据预处理
设接收阵为单条均匀线列阵,阵元个数为N,阵元间隔为d,平均声速为c,导向向量为ω(f,θ),
其中,阵元位置为p=[p1,p2,···,pN],k为波数,k=2πf/c·ν(θ),ν(θ)为信号传播方向的单位向量。设阵元接收信号时域模型为
其中,发射信号通过水声信道后为x(t),随机生成的高斯白噪声序列为n(t),B为添加的噪声强度,B=Px/10(RSN/10),其中Px为信号功率,RSN=SNR为设定大小的SNR值。
CBF功率为
为了便于CNN 网络模型学习,这里对CBF 后功率进行归一化:
1.2.2 标签预处理
CNN 模型分类问题中,目标方位角为θk,k=1,2,···,K,每一个输入矩阵(f,θk),对应标签向量tk=[tk1,tk2,···,tk180],将水平方位角分为180个类别,cj=[(j−1)◦,j◦],j=1,2,···,180。
2 数值仿真
2.1 发射信号仿真
主动发射信号为具有多普勒不变性质的双曲调频(Hyperbolic modulation frequency,HFM) 信号,信号形式为
其中,f0为时间中心频率(也是能量平均意义上的中心频率),m为信号的调频斜率,T为发射信号长度。
本文发射信号s(t)带宽为1200∼1700 Hz,采样率为12 kHz,利用短时傅里叶变换(Short time Fourier transform,STFT)可以得到其时频特征(t,f)为
其中,h(τ−t)为窗函数,研究中选择Hamming 窗函数。
信号的时域波形及利用STFT 得到的时频分析图如图3(a)、图3(b)所示。
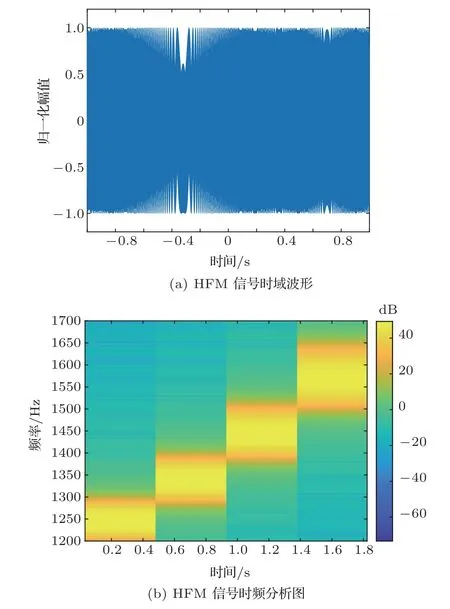
图3 HFM 信号仿真Fig.3 HFM signal simulation
2.2 训练数据仿真
训练集声场环境如图4 所示,声场干涉如图5所示。声源和目标深度都位于20 m,目标距离线列阵阵中心距离范围为3∼13 km,间隔为1 km,水深100 m,沉积层厚度为10 m,沉积层声速为1550∼1600 m/s,沉积层密度为1.6 g/cm3,沉积层衰减为0.3 dB/λ,基底层声速为1650 m/s,基底层密度为1.8 g/cm3,基底层衰减为0.3 dB/λ,声速剖面为1540∼1500 m/s 均匀负梯度,目标散射系数随机设定范围为0.3∼1,方位角范围为20◦∼170◦,间隔为1◦,利用声场仿真软件Kraken,接收阵参数为阵元数N=96,阵元间隔d=0.4 m。

图4 训练集声场环境模型Fig.4 The sound field environment model of training set

图5 声场干涉结构Fig.5 Acoustic field interference structure
验证集参数改为声源和目标深度都位于40 m,目标距离线列阵阵中心距离范围为14 km、15 km,沉积层厚度为15 m,沉积层声速为1650∼1700 m/s,沉积层密度为1.7 g/cm3,沉积层衰减为0.2 dB/λ,基底层声速为1800 m/s,基底层密度为1.9 g/cm3,基底层衰减为0.2 dB/λ,其余与训练集相同。
2.3 训练网络及性能评估
CNN 网络训练过程如图6 所示。根据2.2 节中参数设置,训练集样本数为1661,验证集样本数为302。在进行波束形成时,频率间隔取10 Hz,扫描方位角间隔为1◦,则每次输入到CNN 网络的样本(f,θk)维度为51×181。利用CNN 网络进行DOA估计时,输出层输出一个1×180的向量,将输出向量进行预处理得到关于每个测试样本角度的向量vk,则估计的方位角为θek。网络输出结果利用均方根误差(Root mean squared error,RMSE)来评价。
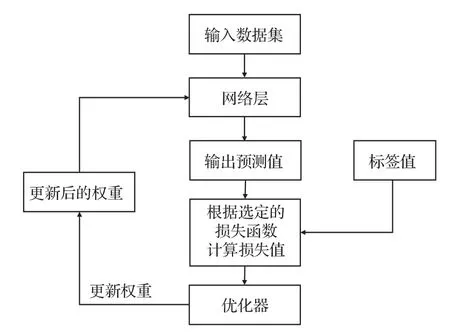
图6 CNN 训练过程Fig.6 CNN training process
其中,K为样本数,目标真实方位角经取整处理后为θrok。
其中,目标真实方位角为θrk。
2.4 CNN 分类模型性能评价
2.4.1 测试参数设置
设拖曳船和目标航行时间为1200 s,间隔20 s采样,测试集样本数为61。主动目标工作结构如图7所示,其余声场环境参数设定与训练集一致。计算出拖曳船和目标之间距离r和方位角θ随时间变化如图8(a)、图8(b)所示。

图7 主动目标工作结构Fig.7 The working structure of Active sonar

图8 随时间变化的实际距离及方位角Fig.8 Actual distance and azimuth over time
其中,xship为拖曳船水平方向上x坐标,t为航行时间,yship为拖曳船水平方向上y坐标。
其中,xtarget为目标水平方向上x坐标,t为航行时间,ytarget为目标水平方向上y坐标。
2.4.2 不同SNR下的性能评价
为了研究不同SNR 下本文目标方位估计方法的鲁棒性,将SNR范围设定在−20∼10 dB范围之间,间隔为5 dB,在测试集阵列接收信号中加入不同SNR 的高斯白噪声。对不同SNR 下阵列接收信号进行CBF,利用本文搭建的CNN 模型对数据集进行训练,利用2.3 节中RMSE 计算公式得出输出预测角度的RMSE 如表2 所示。随着SNR 的降低,模型估计角度的RMSE 会增加,在SNR ≥−5 dB,CNN方法可以以较高精度估计到目标方位角。
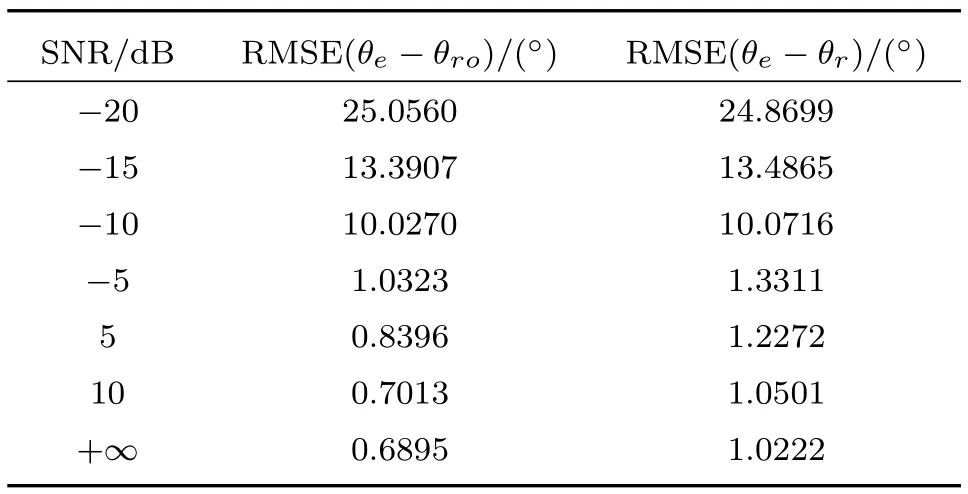
表2 不同SNR 下RMSETable 2 RMSE under different SNR
在−5 dB 下,将本文所用基于CNN 方位估计方法(CBF+CNN)和CBF、MSNR、MVDR 波束形成方法性能进行比较,得出方位估计准确率(允许误差为5◦),利用2.3 节中RMSE 计算公式得出的RMSE 如表3 所示,CBF+CNN 方法估计结果更加可靠,误差相对较小。4 种方法估计方位结果与真实方位角比较如图9 所示,CBF 在一部分时刻估计的方位角与真实的方位角存在较大的偏差,相比高分辨率波束形成方法,CBF+CNN方法估计精度更高更稳健。图10 为目标角度真实值为108.6669◦(t=400 s 时刻)时4 种方法估计结果,本文选用方法估计结果估计误差相对较小。

表3 4 种方法方位估计性能比较Table 3 Comparison of the four methods of bearing estimation performance
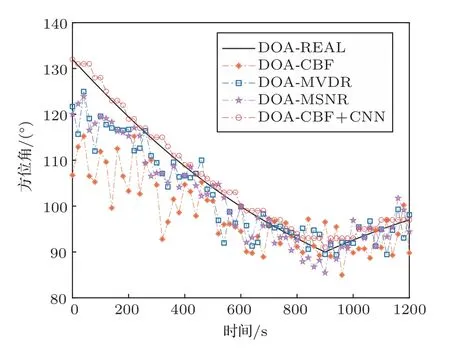
图9 CBF+CNN、MVDR、CBF、MSNR 方位估计比较Fig.9 Comparison of the position estimation results of CBF+CNN,MVDR,CBF,and MSNR methods with the real position
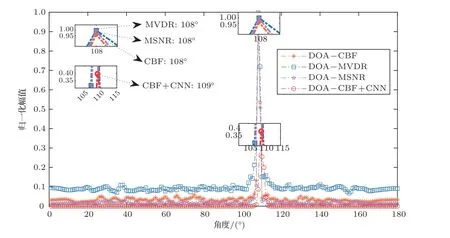
图10 t=400 s 时方位估计结果比较Fig.10 Comparison of bearing estimation results at t=400 s
3 结论
本文提出了一种基于CNN 模型的主动目标方位估计方法,将接收阵列信号CBF 后的结果输入网络,经过仿真实验证实该方法在不同SNR 下具有较高的鲁棒性,可以有效估计目标波达方向。在实际海洋环境下进行仿真,该方法与MVDR、CBF、MSNR 波束形成方法的比对结果证实,其具有更高的估计精度。但本文提出的方法只是相比传统方法有较好的性能,通过模拟仿真对模型进行了验证,但实测的水声数据难以获取,模型依赖于训练数据,当训练环境与测试环境差别较大时,仍然存在环境模型失配的问题。
