巨型星座的空间安全性与自主防碰撞方法
2023-07-05杨盛庆朱文山吴敬玉林荣峰
杨盛庆,朱文山,钟 超,吴敬玉,林荣峰
1. 上海航天控制技术研究所,上海 201109 2. 上海市空间智能控制技术重点实验室,上海 201109
0 引言
近年来低轨星座的发展迅猛,随着卫星研制和运载空间进入成本的降低,星座建设进入了巨型星座发展阶段。巨型星座将在互联网、移动通信、遥感和导航增强领域起到重要作用。目前,国外具有代表性的巨型星座计划有OneWeb星座和SpaceX公司的Starlink星座[1]。经过前期的论证和发展,国内整合资源提出了国网星座[1]。
近期SpaceX借助其重复使用的猎鹰火箭,频繁发射Starlink卫星。截止2022年底,在轨卫星已逾3500颗。这些卫星以一箭多星的形式发射入轨,并借助自身配置的电推进系统抬升轨道,完成目标位置捕获。文献[2]利用两行轨道根数(Two-Line Element,TLE),围绕轨道面分布和星座覆盖性,分析了Starlink 星座第一阶段部署情况。文献[3]利用TLE,分析了Iridium卫星、OneWeb卫星和Starlink卫星的在轨控制规律。经数据分析可以观察到,Starlink卫星相邻卫星的相位偏差多数时间保持在±0.2°以内。由于Starlink卫星轨道的高度较低,受大气阻力影响明显,半长轴衰减较快,卫星需要频繁通过升轨控制进行高度维持[3]。文献[4]通过区域方法(BOX)和碰撞概率风险评估方法,分析了星座和空间站等大型航天器在轨发生碰撞的概率。研究成果表明,若星座长期无控运行,轨道衰减后将对大型低轨航天器产生较大威胁。因此,针对巨型星座的自主防碰撞研究具有重要意义。早期的空间防碰撞研究,主要围绕编队卫星[5-8]。文献[5]基于偏心率/倾角矢量(E/I矢量)联合隔离设计方法,设计了安全轨迹和编队保持控制,使得卫星编队具有稳定的相对运动特征。文献[6]针对编队队形构型初始化和重构过程的相对运动特征,提出了基于Lyapunov稳定性理论的LQR控制器,有效降低了轨道机动过程中的碰撞概率。文献[7]构造了碰撞风险矩阵模型,提出了最小碰撞风险和最小能耗的轨道规避算法。文献[8]提出了虚拟编队框架下,姿轨耦合SE(3)李群空间上的渐进跟踪控制,稳定的编队构型能够有效减小编队内部的碰撞风险。编队卫星之间一般具有接近的轨道参数,属于同轨卫星。巨型星座面临的碰撞风险区别于卫星编队,除星座内部卫星之间的碰撞风险外,还要面临数量众多的星座外部空间目标的碰撞风险。不同轨道之间的交点处存在碰撞,属于异轨碰撞。此类碰撞单圈可预警时间短,且碰撞发生时相对运动速度较大,会对航天器产生致命的损伤。文献[9]针对星座中卫星数量多的问题,提出了避免赤道碰撞的星座参数配置方法,在设计阶段尽可能降低碰撞发生的概率。文献[10]提出星座内的航天器在低纬度地区较分散,在高纬度地区存在汇聚的情况,高纬地区的碰撞发生概率更高。2009年2月10日,Cosmos-2251卫星和Iridium-33卫星在高纬度地区发生了碰撞。与编队卫星相同,通过星座构型保持实现稳定的相对运动特征是避免星座内部卫星之间发生碰撞的有效方法[11-14]。文献[11]针对Flower星座,研究了绝对位置保持控制方法。文献[12]针对典型的异构星座受摄运动,研究了轨道偏置的星座构型保持控制方法。文献[13]针对大型低轨星座在轨运行的高精度构型保持问题,提出了一种基于极限环的高精度相位保持方法。文献[14]基于轨道参数,构造了异轨航天器之间的可观测链路,设计了星间链路的动态拓扑结构。对于星座外部的空间目标,航天器需要具备碰撞自主规避的能力。文献[15]将航天器之间的距离小于安全阈值定义为狭义碰撞,将考虑卫星与理论站位的偏差范围、实际测定轨误差等条件下的碰撞风险定义为广义碰撞,分析了Walker星座构型维持条件下的碰撞检测方法。文献[16]将航天器与空间目标的相对运动分解为视线瞬时旋转平面内的运动与该平面的转动,推导了航天器的最佳规避方向。文献[17]分析了空间目标在航天器B平面空间的相对运动规律,将规避机动策略的优化转换为一个特征值求解问题,提出了最大规避距离和最小碰撞概率的机动策略。文献[18]考虑到针对碰撞预警进行轨道积分的系统误差,提出了一种基于置信区间的轨道积分方法。由于空间目标数据巨大、轨道动力学模型的计算复杂度高,且受轨道积分步长和预警时长的约束,碰撞预警难以在星上自主完成。碰撞预警在地面系统完成后,上注控制指令进行碰撞规避机动。目前,碰撞预警的提前时长以天为量级,由于航天器和空间目标的测定轨误差,使得碰撞预警确定的碰撞位置存在公里级乃至10公里级的偏差。未来,在发生碰撞预警后,可以将触发碰撞预警的空间目标信息上注给航天器。航天器利用自身携带的敏感器监视空间目标,结合自身的轨道机动能力实施碰撞规避机动(化学推进、电推进在响应时间和标称推力存在区别)。如前文所述,异轨碰撞发生在轨道的交点处,触发碰撞预警至预报的碰撞发生时刻,航天器之间存在多次交会。每次交会时,相对运动状态朝着发生碰撞的趋势发展。基于此特征,可以参考无人机基于视线测量的自主防碰撞策略[19-20],在多次交会时根据空间目标的预测状态进行实时观测,实现多轨交会航过的目标监视。从多轨交会航过的目标监视信息可以推演出碰撞发生的趋势,选择合适的规避机动时机和策略,可以减少不必要的规避机动。
本文针对巨型星座的空间安全性与自主防碰撞问题,提出了碰撞的轨道参数表征形式,分析了星座内部和星座外部的碰撞风险。针对异轨空间目标相对速度大、交会时间短的特征,提出了基于多轨交会航过观测的自主防碰撞规避。碰撞预警信息结合实时监视信息,能够合理确定规避机动的时机和控制量,减少不必要的规避机动。
1 星座构型与安全性
1.1 碰撞的轨道参数表征
Walker-δ星座特征码N/P/F,N为卫星总数,P为轨道面数,F为量纲因子[9, 21],F=0,…,P-1。星座中第l个轨道面的第j颗卫星,轨道参数和特征码的关系如下:
(1)
其中:下标l=0,…,P-1,j=0,…,S-1,Ω表示轨道的升交点赤经,u表示轨道的纬度幅角。
对于近地近圆轨道,确定两个轨道交点的参数为轨道倾角i和升交点赤经Ω。已知两个轨道的轨道参数il,ij,Ωl,Ωj,需要确定轨道交点的位置ul和uj。惯性系的位置如下[22-23]:
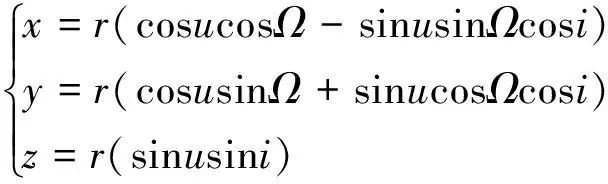
(2)
其中:r为地心距。对于航天器发生轨道交会与碰撞的条件,可以使用球面三角形进行分析[24]。
轨道交点处rl=rj,zl=zj,根据z轴坐标定义可知:
sinulsinil=sinujsinij
(3)
若il=ij,则该条件退化为ul=uj。
进一步求解交点处ul和uj,根据式(3)定义系数ks:
(4)
定义系数kc:
(5)
轨道交点处xl=xj,yl=yj,满足:
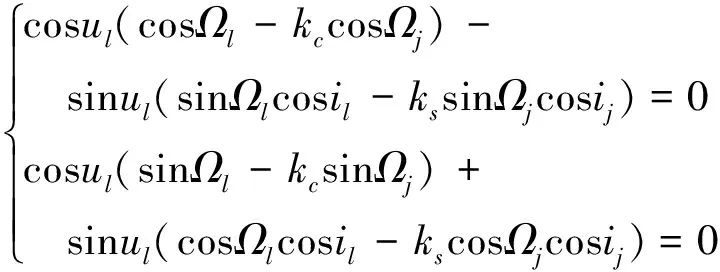
(6)
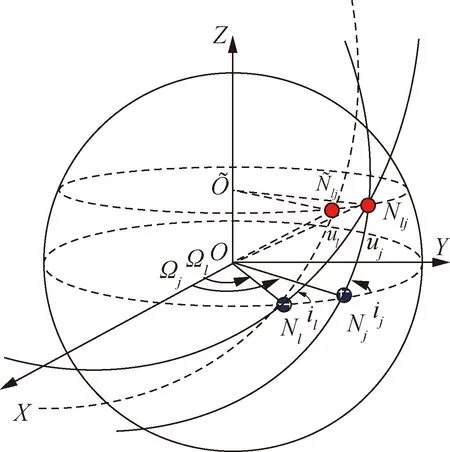
图1 空间中的轨道交点
1.2 星座的外部碰撞风险
空间碎片和在轨航天器的数量急剧增长,空间环境日趋拥挤。根据空间目标的动力学特性,可以划分为同面轨道和异面轨道。同轨指航天器之间具有相同或接近的轨道面外参数。同轨目标的相对速度小、长期可观测。航天器与同轨目标形成相对稳定的周期相对运动,通过预警信息确定目标后可以长期监视。对于同轨目标,可以采取轨位撤离的控制策略,撤离后持续进行目标的状态监视。
异轨指航天器之间具有明显差别的轨道面外参数,较大的轨道倾角和升交点赤经偏差,导致在轨道交点处航天器之间的相对运动速度较大。同时,由于轨道面存在差异,可观测监视的时间较短。
2 星座的防碰撞特征与预测
2.1 自主防碰撞
目前,在预测触发防碰撞预警时,一般由地面确定规避的轨道机动策略并上注执行。实现自主防碰撞,需要确定空间目标的实时运动信息,可以通过解析解预报或高精度轨道积分实现。但是,轨道解析解难以涵盖全摄动环境的轨道动力学模型,长期预报的精度较低。高精度轨道动力学积分则需要设置小步长积分,计算代价大,难以使用星载计算机实现碰撞预警。
由于空间目标的数量日趋增多,航天器与空间目标的碰撞预警计算量巨大,需要在地面完成。碰撞风险的预测需要基于航天器和空间目标的测定轨,结合轨道动力学模型进行预报。对于具备相机或雷达的航天器,设计合理的目标状态确定方法,可以实现空间目标的监视。
2.2 异轨目标的碰撞特征
2009年2月10日,Cosmos-2251和Iridium-33在西伯利亚附近发生了碰撞,本文以此为算例进行仿真分析。轨道初值如表1所示,碰撞发生在当天的16:56,碰撞发生的惯性空间位置如图2所示。图3为碰撞发生过程的相对运动情况,碰撞发生在两个轨道的交点。图4为多次交会时两个航天器的相对运动情况,可以观察到相对位置具有渐近趋势。
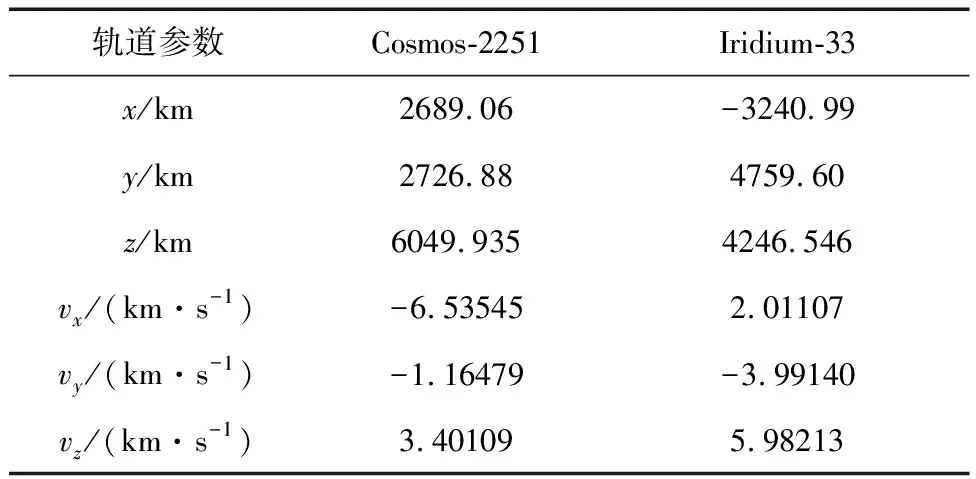
表1 历元2009.2.10 00:00:00 (UTC) 轨道参数
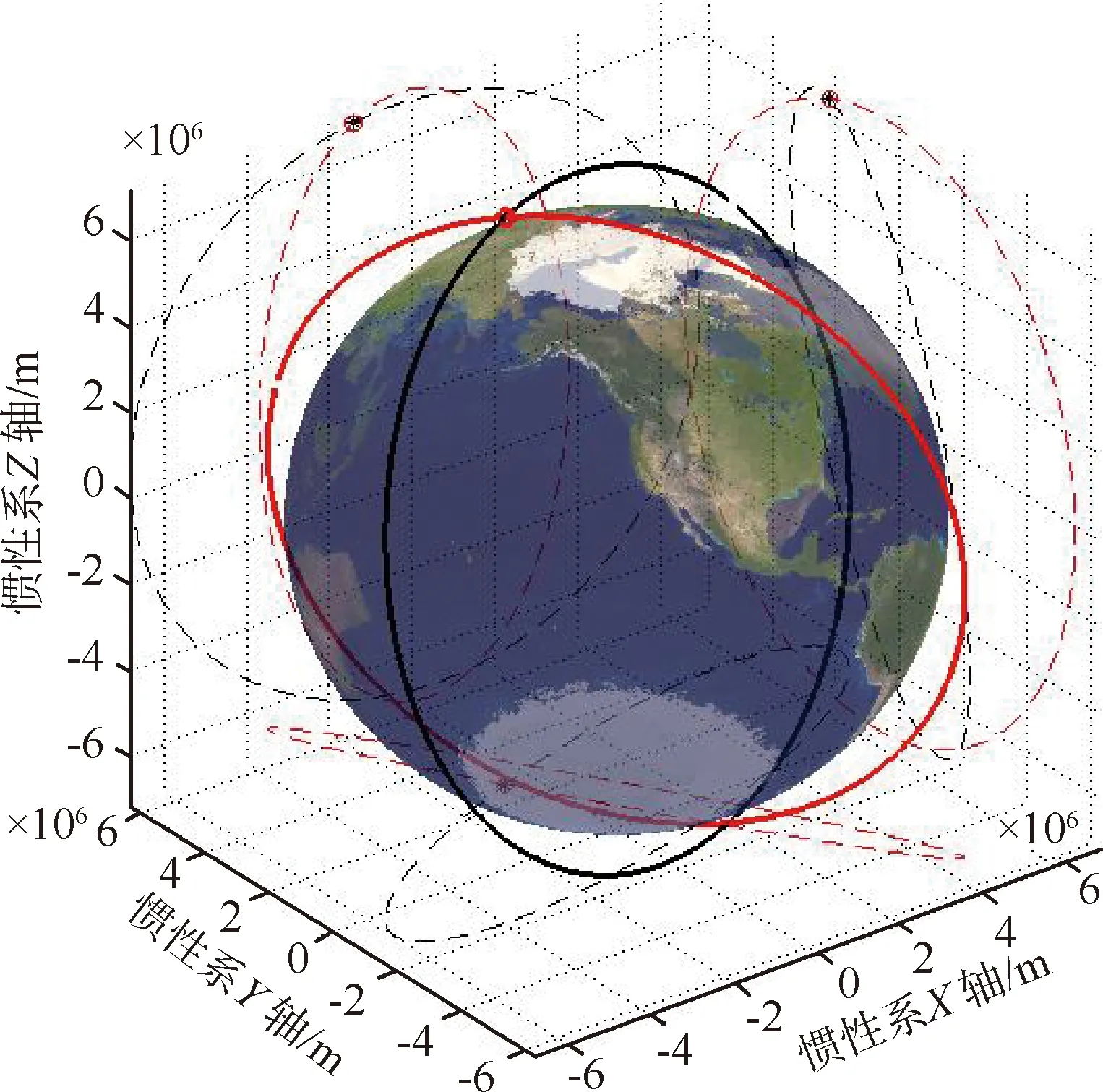
图2 Cosmos-2251和Iridium-33碰撞位置
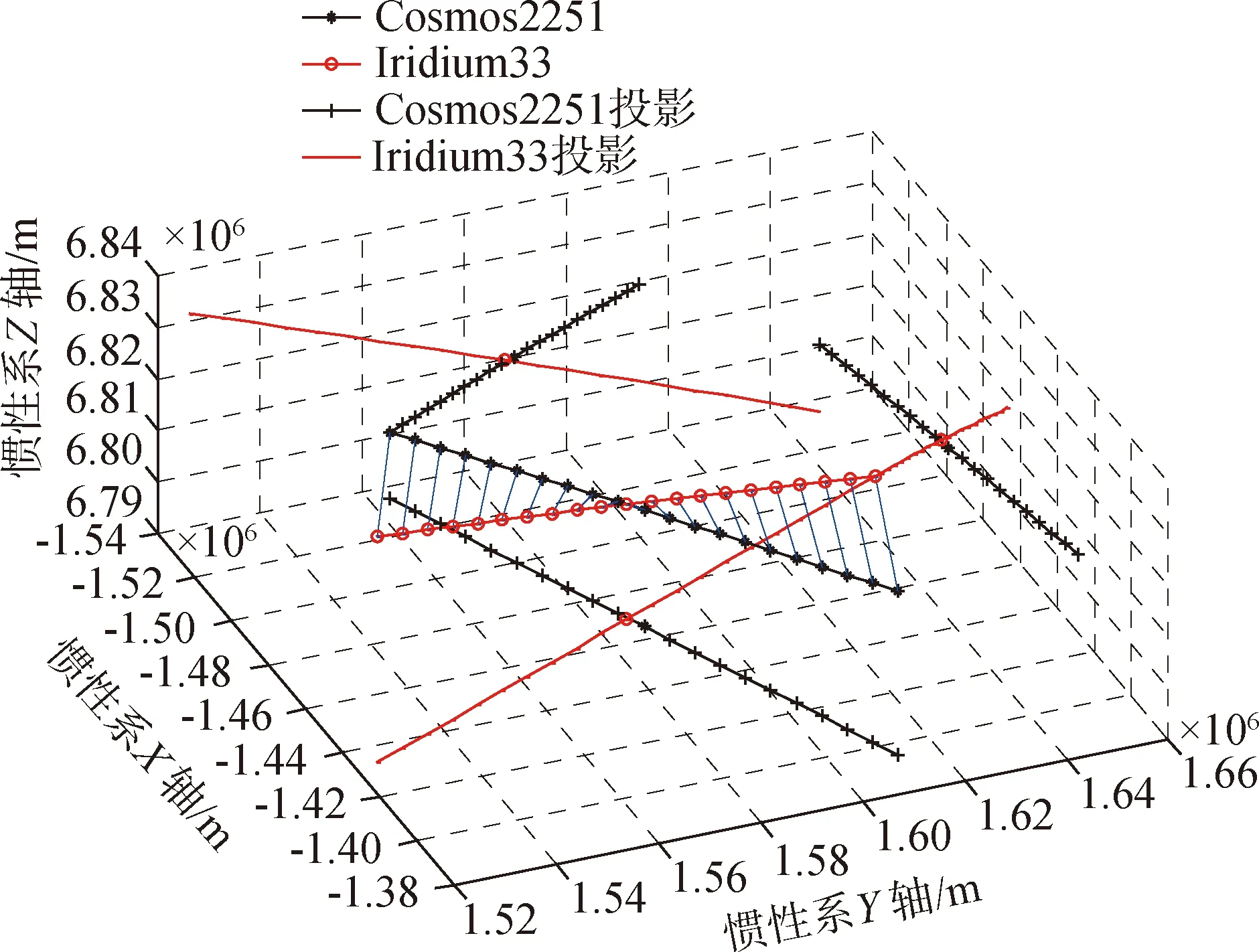
图3 Cosmos-2251和Iridium-33碰撞过程的相对运动
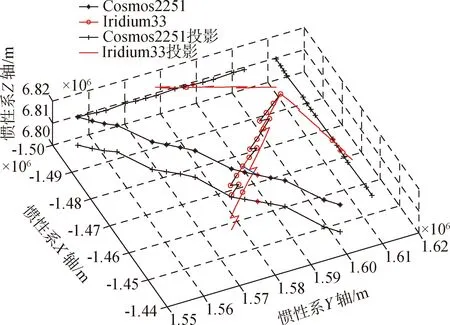
图4 多轨交会的相对位置
记轨道系下相对位置[xrel,yrel,zrel]T,高低角θ、方位角ψ和相对距离Δr定义为:

(7)
3 星座的自主防碰撞
3.1 异轨目标的预警与监视
碰撞风险的界定使用BOX方法[4],以航天器为中心,预警的门限为相对距离4 km×0.5 km×4 km,航天器与空间目标距离小于该阈值视为发生碰撞。
虽然异轨目标相对速度大、交会时间短,但从惯性空间角度看,轨道交点位置明确,航天器和空间目标在轨道交点处的交会距离是一个逐渐变化的过程。因此,可以设计多轨交会航过的观测方法。通过多航过时的状态变化,估计相对运动状态,实现星上自主的空间目标监视功能,提高自主防碰撞风险评估的时效性。
多轨交会航过监视分为2个层次:
1)单次交会航过观测。确定空间目标的方位角变化、估计相对距离(光学敏感器可由多次成像的图像尺寸和变化情况进行估计),单次交会航过的过程中,将方位角发生极性变化处视为交会点,单次交会航过观测如图5所示;
图5 单次交会航过观测
2)多轨交会航过观测。确定多次交会点处的相对距离变化趋势,判断碰撞发生风险,多轨交会航过观测如图6所示。
图6 多轨交会航过观测
建立Cosmos-2251轨道系下相对位置,利用相对位置计算距离和方位角。一个轨道周期内具有两个轨道交点,相隔180°。考虑到交会时方位角的极性和相对运动变化趋势的不同,采用两个交会点分组观测监视。考虑到单次交会的时间较短,仿真分析时选取交会点前后30 s的数据。
在Cosmos-2251和Iridium-33位于北半球的轨道交点处,多轨交会航过观测的距离和方位角变化情况如图7~8所示。可以观察到,在发生交会前后,方位角发生极性变化。多轨交会航过观测的距离变化情况、Cosmos-2251轨道系下三轴分量的变化情况如图9所示。变化趋势较快的是轨道系X轴(轨道切向)和Y轴(轨道法向)分量。
图7 多轨交会航过观测的距离变化情况
图8 多轨交会航过观测的方位角变化情况
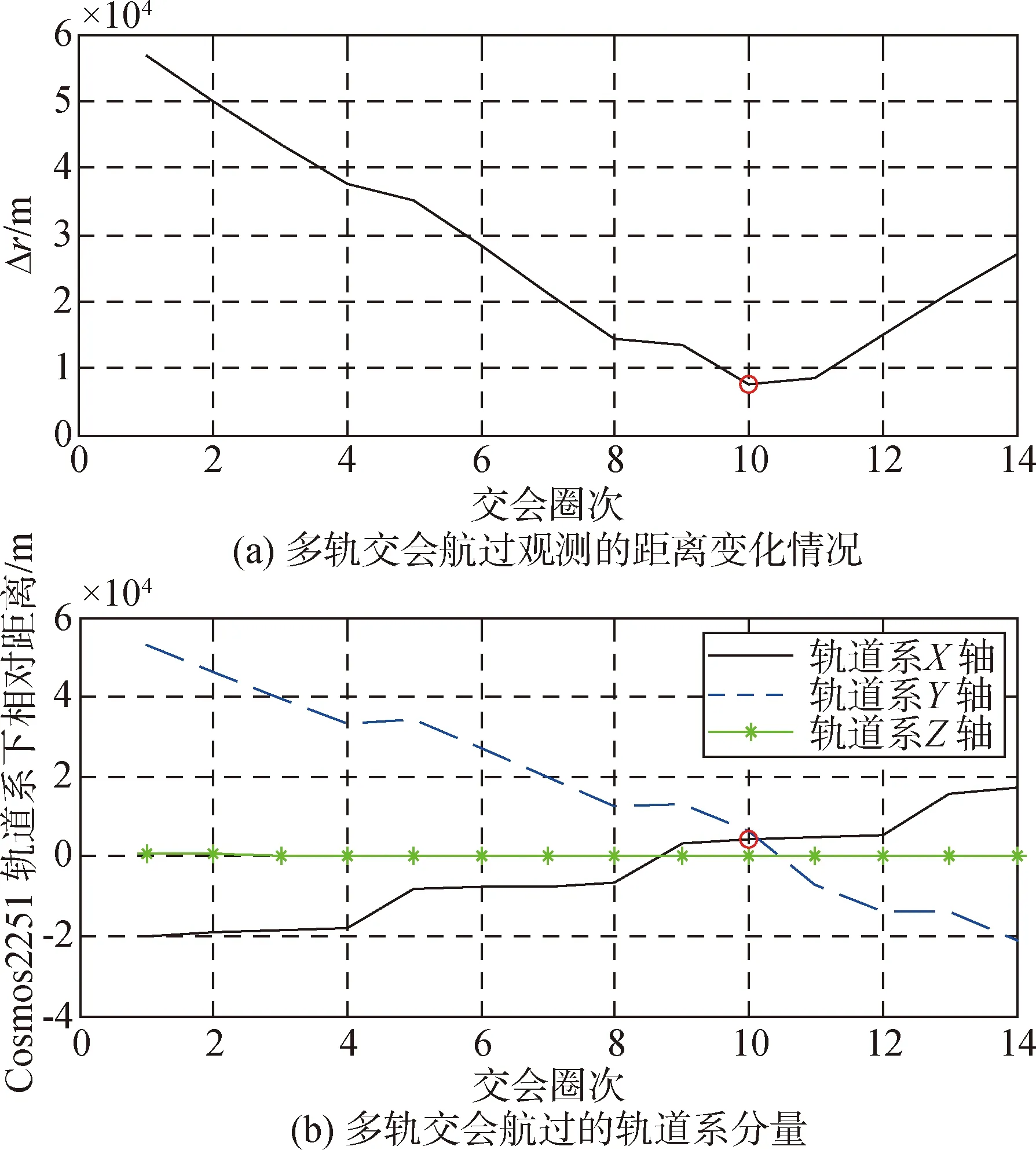
图9 多轨交会航过观测的变化趋势
3.2 自主防碰撞制导率

(8)
(9)
采用本文提出的多轨交会航过监视,使得异轨碰撞的规避机动窗口变得灵活。航天器无需在碰撞发生当前圈次的短短几十秒内做出规避,也无需依赖地面提前一天进行规避。提高了自主碰撞规避的能力,减少了规避机动的控制量。
自主防碰撞规避过程如图10所示,在第6次交会时,相对距离小于30 km处触发防碰撞规避机动,CW制导至原理论轨道的安全区域外。无控情况和规避情况下多圈航过的交会距离如图10(a)所示,两种情况下空间目标在本星的轨道系X轴和Y轴的分量如图10(b)所示。
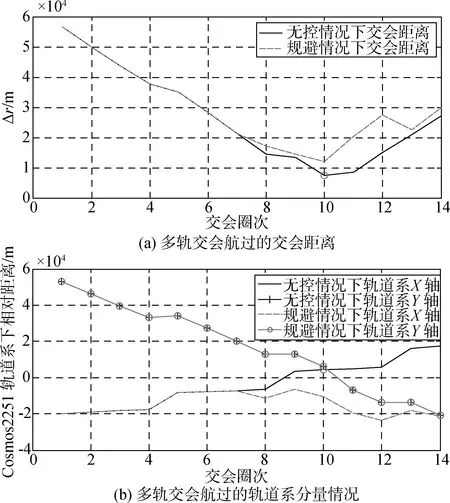
图10 提前4轨进行轨道面内的规避机动过程
4 结论
针对巨型星座的空间安全性与自主防碰撞问题,提出了轨道参数表征形式的轨道交点位置,分析了巨型星座内部和外部、同轨空间目标和异轨空间目标的碰撞特征。
针对异轨空间目标相对速度大、交会时间短的特征,提出了基于地面碰撞预警信息和多轨交会航过观测的空间目标监视和自主防碰撞方法。该方法的地面预警信息主要用于空间目标的捕获,通过多轨交会的监视获取相对运动趋势,能够避免长时间轨道积分的误差积累,合理减小轨道规避的时间窗口和规避机动量。
