基于LVQ 神经网络的雷达杂波抑制方法*
2023-06-01施端阳
施端阳,林 强,胡 冰,翟 芸
(1.空军预警学院防空预警装备系,武汉 430019;2.解放军95174 部队,武汉 430040)
0 引言
随着雷达技术的飞速发展,雷达在军用和民用领域发挥着至关重要的作用。雷达的巨大用途决定了其工作环境的复杂性。在实际工作中,雷达会接收到地物、云雨、海浪、鸟群等非目标回波,也可能会遭到敌方干扰机、箔条等有源或无源干扰。此外,由于雷达体制的原因,目标回波也可能出现分裂。上述原因导致的雷达不需要的回波可统称为杂波[1]。回波信号经过雷达信号处理后仍然会遗留大量的剩余杂波点迹,杂波点迹和目标点迹混合在一起会严重影响后续的航迹起始和跟踪的性能。因此,在雷达数据处理中进行点迹处理,抑制剩余杂波具有重要的意义。
20 世纪90 年代,雷达剩余杂波抑制得到了我国学者的高度关注。文献[2]分析了剩余杂波的来源,针对非目标回波、目标分裂和有源干扰等不同原因造成的杂波分别给出了点迹处理的方法和流程,为剩余杂波抑制指明了研究方向。在对非目标回波引起的剩余杂波抑制方面,文献[3]通过分析相控阵雷达对海探测的回波数据后,发现目标点迹和杂波点迹在距离- 方位单元具有不同的分布特性,并以此为判断准则,滤除剩余杂波。文献[4]针对仙波形成虚假航迹的问题,选取仙波的空间分布、多普勒频率和幅值三维特征,利用层次分析法对量化的特征进行加权求和,并与阈值进行比较,提出了多准则决策的杂波抑制方法。在对目标分裂引起的剩余杂波抑制方面,文献[5]针对高分辨雷达探测扩展目标时存在散射点影响雷达跟踪性能的问题,分析散射点残差的统计特性后,构建判断准则,滤除残差值异常的散射点。在对有源干扰引起的剩余杂波抑制方面,文献[6]通过主、被动雷达网对目标进行探测,在航迹起始阶段,将主动雷达和被动雷达探测的目标方位角和俯仰角进行比对,若两者不一致,则判定为假目标,予以滤除。文献[7]在信号处理后,利用空间中点迹密度小、噪声点迹随机分布的特点,通过3/4 逻辑法滤除噪声点迹。上述方法主要依据一定的判断准则,通过人工比对的方式对目标点迹和杂波点迹进行区分,智能化程度较低。
近年来,人工智能技术发展成熟,其机器学习算法具有强大的分类功能。通过提取目标点迹和杂波点迹的差异化特征,利用机器学习算法构建雷达点迹分类模型,对目标点迹和杂波点迹进行分类鉴别,实现杂波抑制成为一种新的思路。文献[8]提取多普勒雷达回波点迹的距离展宽、方位展宽和归一化幅度三维特征,构建分层贝叶斯分类模型,通过少量样本对模型进行训练,对欺骗式干扰形成的假目标点迹具有较好的抑制效果。文献[9]提出了基于模糊神经网络的气象雷达地杂波抑制方法,提取反射率因子、微分反射因子、差分传播相移和互关联系数四维特征,设计模糊神经网络分类模型,对降水回波和地杂波进行区分,起到了较好的抑制效果。文献[10]提出了基于径向基神经网络的海杂波抑制方法,引入灰狼算法优化模型的初始参数,避免了径向基神经网络算法收敛速度慢,易陷入局部最优的问题,对海杂波具有较好的抑制作用。文献[11]提出了基于多机器学习改进的Kalman 滤波方法,通过遗传算法改进的BP 神经网络修正Kalman滤波器的误差,从而提高野值剔除的精度,对飞行器试飞数据起到了良好的滤波效果。
本文针对雷达剩余杂波影响雷达跟踪性能的问题,提出了基于LVQ 神经网络的雷达杂波抑制方法。在对雷达回波数据进行统计分析的基础上,提取目标点迹和杂波点迹差异化较大的八维特征,构建LVQ 神经网络分类模型对雷达回波点迹进行区分,根据分类结果滤除杂波。
1 雷达点迹数据特征提取
雷达回波信号中被调制了物体的某些信息。对回波进行脉冲压缩、动目标显示、动目标检测和恒虚警检测等处理后,可以得到包含物体距离、方位、幅度、多普勒等信息的雷达点迹数据。雷达点迹数据与物体的物理状态和雷达工作体制有关,由于目标和杂波具有不同的物理状态,反射的回波经过信号处理后,得到的点迹信息也不尽相同。因此,可以根据目标点迹和杂波点迹的特征差异,对回波点迹的类别进行区分。
某型空管雷达原始回波数据格式中包含了数十个反映目标特性的特征参数。本文采集该型空管雷达窄带工作模式下,雨雪、大雾等不同气象条件时的雷达原始回波数据,经过信号处理后生成65 000 个雷达点迹数据,其中,目标点迹50 000 个,杂波点迹15 000 个。对雷达点迹数据进行统计分析后,选取目标点迹和杂波点迹差异化较大的特征作为分类模型的输入数据。
1.1 多普勒速度
1.2 回波原始幅度
回波原始幅度为雷达原始回波信号经过信号处理后每个处理单元的原始幅度值。通过对采集的雷达点迹数据进行统计分析,目标点迹和杂波点迹的回波原始幅度特征分布如图1 所示。杂波点迹的回波原始幅度主要集中在81 dB~84 dB,占比92%;目标点迹的回波原始幅度主要集中在83 dB~86 dB,占比83%。因此,回波原始幅度小于83 dB 的点迹大概率是杂波点迹,大于84 dB 的点迹大概率是目标点迹。
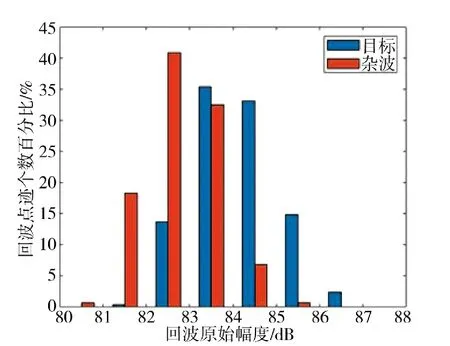
图1 雷达点迹回波原始幅度特征分布Fig.1 The original amplitude characteristic distribution of radar echo trace points
1.3 回波背景幅度
回波背景幅度为同一工作区域经过多次扫描后估算的平均杂波背景强度。通常,杂波点迹集中的区域的平均杂波背景强度要高于目标点迹集中的区域。对雷达点迹数据进行统计分析,目标点迹和杂波点迹的回波背景幅度特征分布如图2 所示。杂波点迹的回波背景幅度主要集中在79 dB~84 dB,占比超过95%;目标点迹的回波背景幅度主要集中在79 dB~81 dB,占比98%。因此,回波背景幅度大于81 dB 的点迹大概率是杂波点迹。
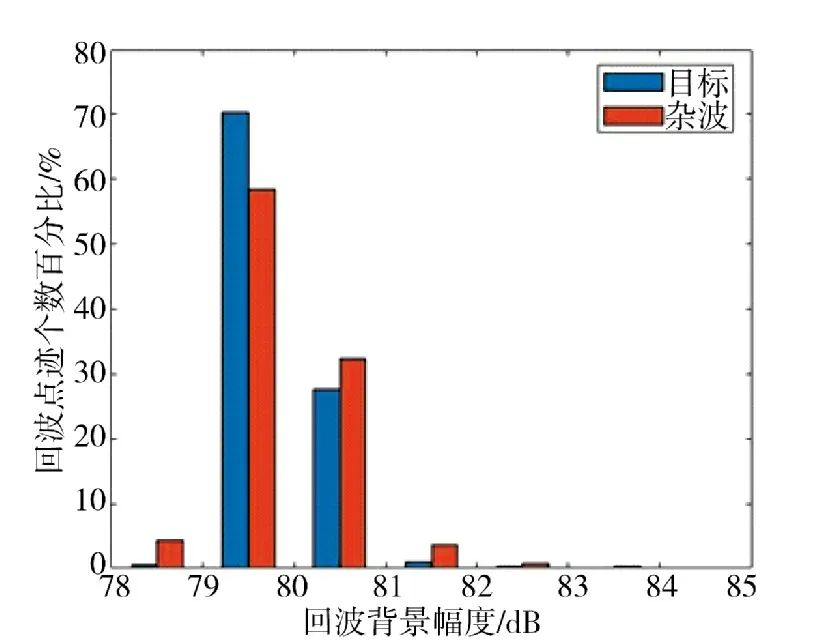
图2 雷达点迹回波背景幅度特征分布Fig.2 The background amplitude characteristic distribution of radar echo trace points
1.4 滤波标志
滤波标志是雷达信号处理时,在不同的杂波背景下采取的不同的滤波方式。该型空管雷达具备4种滤波方式,分别用0~3 表示。0 代表清洁区滤波,1代表弱杂波区滤波,2 代表中等杂波区滤波,3 代表强干扰区滤波。目标点迹和杂波点迹的滤波标志特征分布如图3 所示。接近80%的回波点迹的滤波标志为0 和2,其中,采取清洁区滤波方式的目标点迹更多,采取中等杂波区滤波方式的杂波点迹更多。因此,滤波标志为0 和3 的点迹更可能是目标点迹,滤波标志为1 和2 的点迹更可能是杂波点迹。
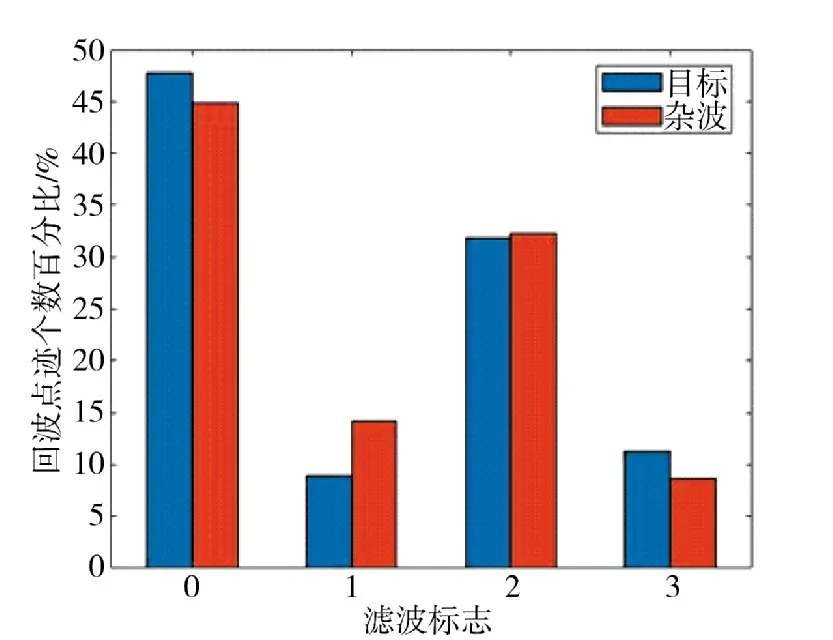
图3 雷达点迹滤波标志特征分布Fig.3 The filter mark feature characteristic distribution of radar echo trace points
1.5 恒虚警类型
恒虚警类型是回波信号在恒虚警检测时根据不同的背景环境采取的恒虚警检测方式。该型空管雷达具备4 种恒虚警检测方式,分别用0~3 表示。0 代表噪声恒虚警,1 代表单元平均恒虚警,2代表单元平均选大恒虚警,3 代表有序统计恒虚警。噪声恒虚警适用于背景起伏缓慢的区域,单元平均恒虚警适用于均匀杂波区,单元平均选大恒虚警适用于非均匀杂波区,有序统计恒虚警适用于干扰区域。目标点迹和杂波点迹的恒虚警类型特征分布如图4 所示。回波点迹的主要恒虚警类型为噪声恒虚警,恒虚警类型为1 点迹很可能为目标点迹,恒虚警类型为3 点迹很可能为杂波点迹。
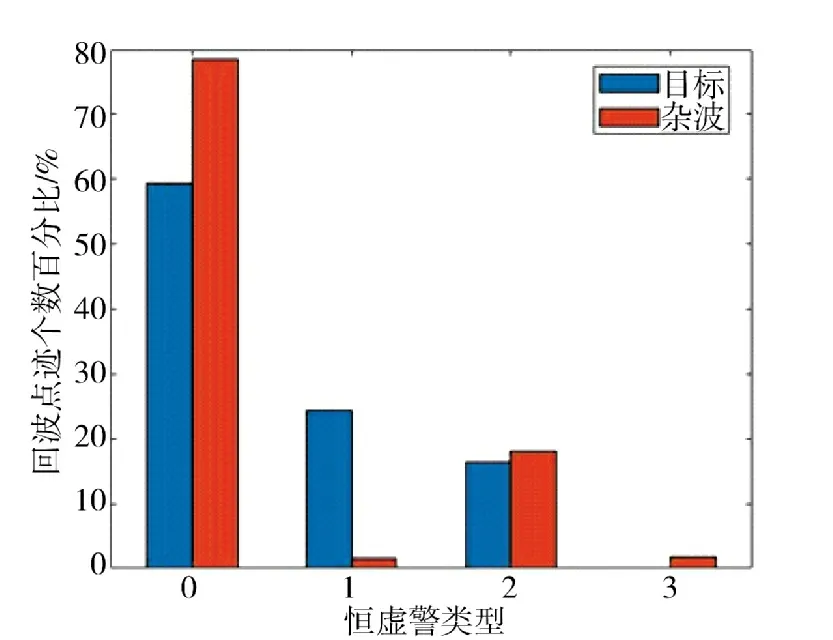
图4 雷达点迹恒虚警类型特征分布Fig.4 The constant false alarm type characteristic distribution of radar echo trace points
1.6 杂噪比等级
杂噪比等级为点迹在处理区域的杂波功率与噪声功率的比值等级,杂噪比越小,其等级越小,反映了背景环境的复杂度。通常,目标点迹的背景环境更清洁,杂噪比更小。目标点迹和杂波点迹的杂噪比等级特征分布如图5 所示。目标点迹的杂噪比等级主要为0~1,杂噪比等级大于2 的回波点迹很可能是杂波点迹。

图5 雷达点迹杂噪比等级特征分布Fig.5 The clutter noise ratio grade characteristic distribution of radar echo trace points
1.7 滤波器组类型
滤波器组类型是回波在动目标检测时通过的滤波器组的类别。该型航管雷达根据频率移动量分为4 种滤波器组,分别用0~3 表示。0 代表低的多普勒频移,1 代表中等多普勒频移,2 代表较高多普勒频移,3 代表高的多普勒频移。通常,目标比杂波具有更高的多普勒频移。目标点迹和杂波点迹的滤波器组类型特征分布如图6 所示。接近80%的目标点迹的多普勒频移很高,杂波点迹的多普勒频移普遍较低。因此,滤波器组类型为0 和1 的回波点迹更可能为杂波点迹,滤波器组类型为3 的回波点迹更可能为目标点迹。
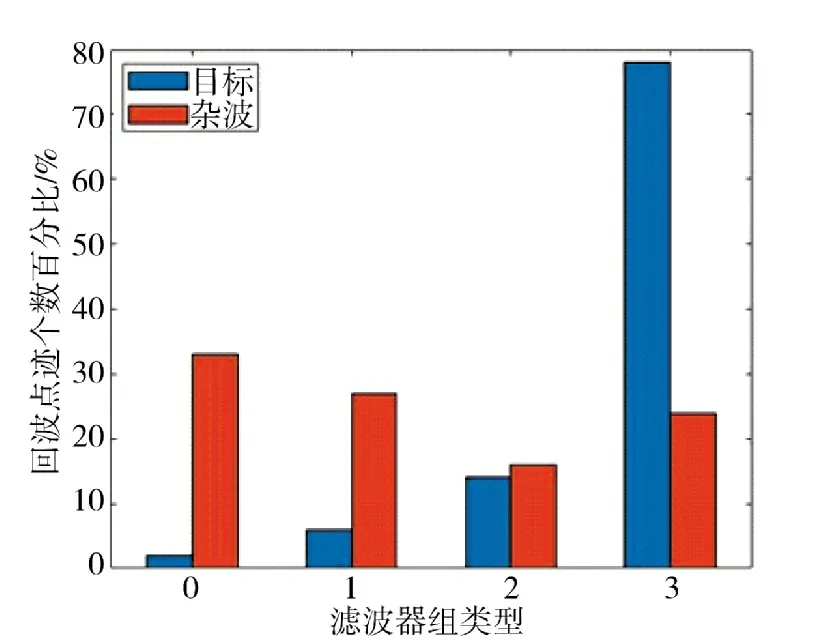
图6 雷达点迹滤波器组类型特征分布Fig.6 The filter bank type characteristic distribution of radar echo trace points
1.8 EP 质量
EP 质量是回波点迹的信噪比、EP 数量、距离展宽以及方位展宽的加权和,共分为10 个等级。通常,目标点迹的EP 质量优于杂波点迹。目标点迹和杂波点迹的EP 质量特征分布如图7 所示。超过70%的杂波点迹的EP 质量为2~5,90%的目标点迹的EP 质量为5~10。因此,EP 质量大于5 的回波点迹很可能是目标点迹,小于5 的回波点迹很可能是杂波点迹。
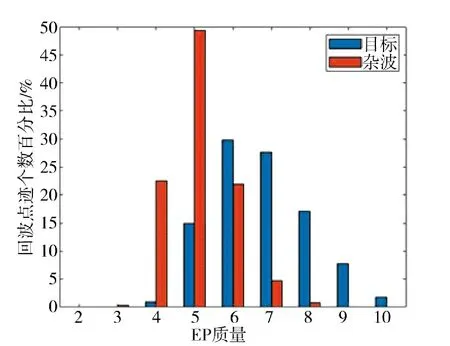
图7 雷达点迹EP 质量特征分布Fig.7 The EP quality characteristic distribution of radar echo trace points
经过统计分析,提取了回波点迹的多普勒速度、回波原始幅度、回波背景幅度、滤波标志、恒虚警类型、杂噪比等级、滤波器组类型和EP 质量8 个特征。
陈武在致辞中表示,广西壮族自治区成立60年来,全区各族人民共同团结奋斗、共同繁荣发展,创造了令人瞩目的成就。第十二届园博会的举办是广西贯彻习近平生态文明思想、推进生态文明建设的重要实践,是打造广西“山清水秀生态美”金字招牌的重要机遇。广西各族人民将全力当好东道主,努力打造一届精彩圆满、特色浓郁的园林盛会,诚邀各界朋友到广西走走看看,亲身感受八桂壮乡的独特魅力。
2 LVQ 神经网络原理
LVQ 神经网络是一种有导师学习的前馈型神经网络,其结构简单,分类性能优异,在模式识别等领域应用广泛[12]。
2.1 LVQ 神经网络结构
LVQ 神经网络由3 部分组成,由前至后依次为输入层、竞争层和线性输出层[13]。前两层的神经元之间全连接,后两层的神经元之间部分连接,第2层的神经元数量大于第3 层,其结构如下页图8 所示。第2 层每个神经元仅与第3 层的一个神经元相连,权值均为1。但第3 层每个神经元可连接多个第2 层神经元。后两层神经元的值为0 或1,当某组数据输入第1 层时,与该数据距离最近的第2 层神经元得到响应,该神经元的值为1,第2 层其他神经元的值均为0。此时,与第2 层被激活神经元相连的第3 层神经元也被激活,其余未被激活的第3 层神经元的值为0,该组输入数据被分到第3 层状态值为1 的神经元类别中。

图8 LVQ 神经网络结构Fig.8 LVQ neural network structure
2.2 LVQ 神经网络学习规则
LVQ 神经网络对竞争层的训练是有导师学习的方法。可将LVQ 神经网络算法视为对无导师学习的自组织特征映射算法在有导师学习中的改进。LVQ神经网络算法可分为LVQ1、LVQ2 和LVQ3 三种[14],LVQ2 和LVQ3 是在LVQ1 的基础上改进得来,其学习规则与LVQ1 大体相似,本文采用LVQ1 算法设计分类模型,LVQ 神经网络模型如图9 所示。
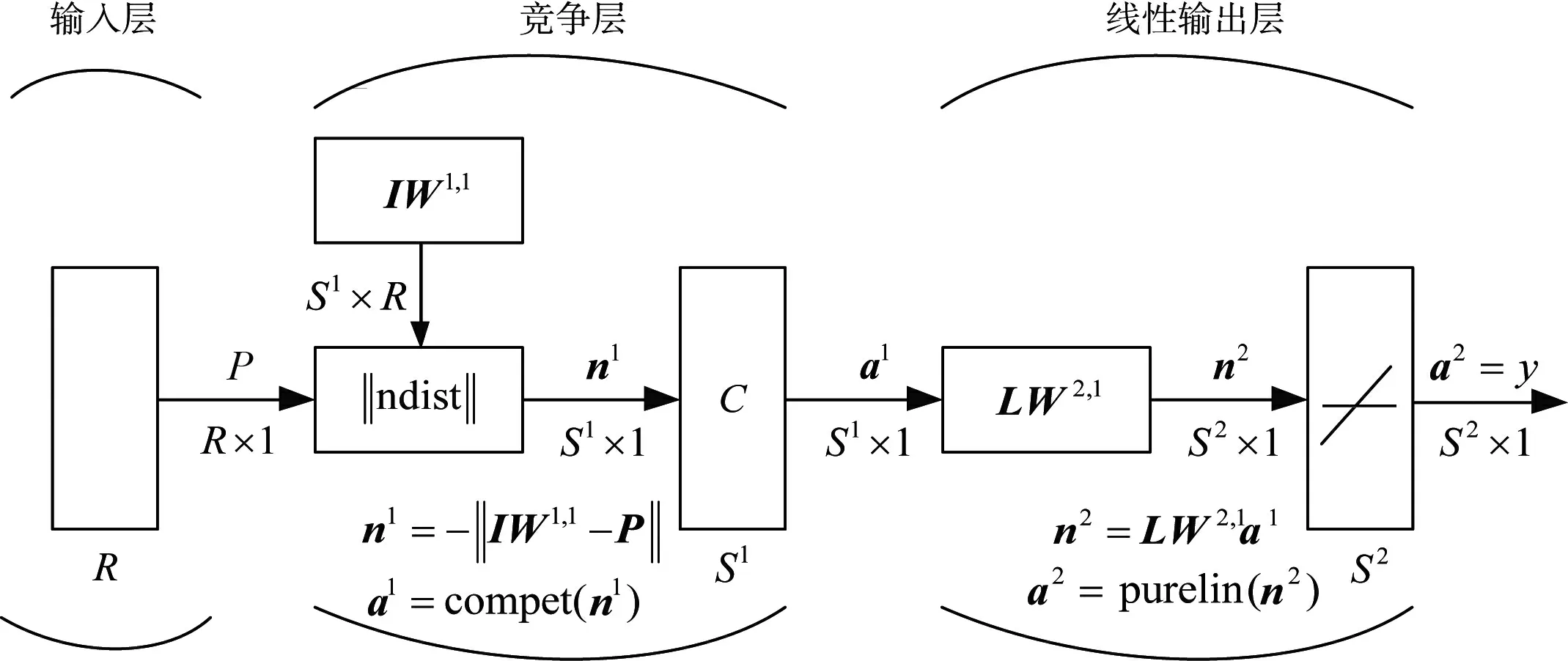
图9 LVQ 神经网络模型Fig.9 LVQ neural network model
图9 中,P 是维数为R 的输入向量;S1和S2表示后两层的神经元数量;IW1,1和LW2,1表示前两层之间和后两层之间的连接权值矩阵;n1和a1表示第2 层的输入和输出向量;n2和a2表示第3 层的输入和输出向量。
LVQ 算法的训练思想是:通过计算输入数据组成的向量P 与前两层之间的连接权值矩阵IW1,1各行向量的距离,找到距离最近的第i 行向量。此时,第2 层的第i 个神经元被激活,a1中第i 个元素值为1,其余元素值为0。再计算后两层连接权值矩阵LW2,1与a1的乘积,得到第3 层的输入向量n2。第2层输出向量a1中值为1 的元素会激活第3 层中第k 个神经元,使第3 层的输出向量a2中第k 个元素的值为1,认为输入向量P 属于第k 类。最后,判断输入数据的真实类别与预测类别是否相同,若类别相同,则对应的第2 层神经元权值沿着输入向量方向调整;反之,沿反方向调整。
LVQ 神经网络算法的训练步骤如下:
Step 1:随机初始化前两层权值矩阵IW1,1(q)和学习率η(η>0);
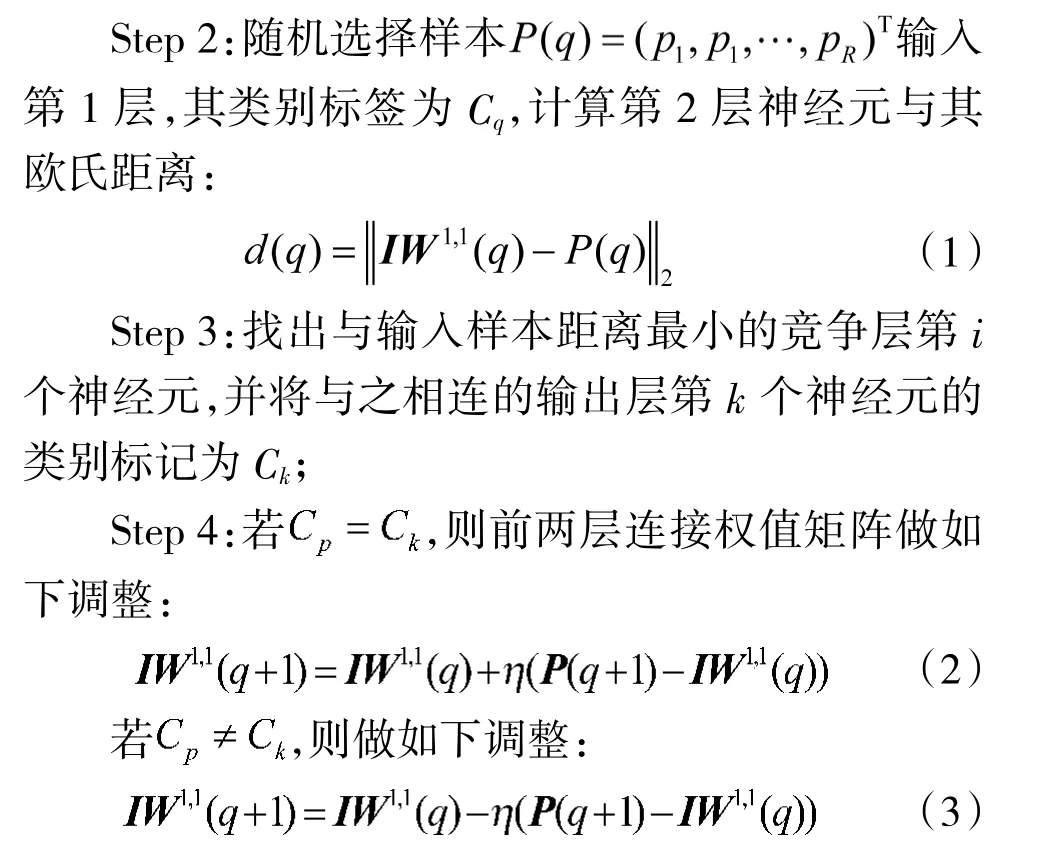
Step 5:重复Step 1~Step 4,直到误差精度满足要求或者达到最大迭代次数。
3 LVQ 神经网络雷达点迹分类模型
LVQ 神经网络首尾两层神经元数量由输入和输出数据的维数确定[15]。为了对雷达回波点迹的类型进行判别,提取了目标点迹和杂波点迹具有差异性的八维特征。因此,LVQ 神经网络雷达点迹分类模型是一个二分类模型,输入数据是八维特征向量,输出数据为目标或杂波两种类别。模型的首尾两层分别由8 个神经元和2 个神经元组成。中间层神经元数量需要综合考虑模型的训练时间和分类精度,本文通过试验确定竞争层神经元数量。
LVQ 神经网络雷达点迹分类模型的训练是一种有导师学习方法,需要大量带有标签的样本数据对模型进行训练。当模型的误差达到要求时,模型训练完毕,然后利用训练好的模型对雷达接收的回波点迹进行分类识别,保留识别为目标的点迹,剔除识别为杂波的点迹,从而达到杂波抑制的效果。该模型的杂波抑制流程如图10 所示。

图10 LVQ 神经网络雷达杂波抑制流程图Fig.10 Flow chart of LVQ neural network radar clutter suppression
4 实验及分析
将采集的不同气象条件下的65 000 个航管雷达点迹数据按点迹类型分别存储,其中,目标点迹50 000 个,杂波点迹15 000 个。为了保证样本的均衡性,随机从目标点迹中选取15 000 个样本与15 000 个杂波样本组成数据集进行试验。将数据集按4∶1 划分为训练集和测试集,样本分布如表1所示。
表1 数据分布表Table 1 Data distribution table
4.1 竞争层神经元数量确定
构建LVQ 神经网络雷达点迹分类模型前,需要确定竞争层神经元的数量。利用表1 中的数据,将竞争层神经元数量依次设定为3~100,分别对分类准确率进行计算,得到如图11 所示的分类准确率与竞争层神经元数量的关系曲线。由图11 可知,模型对目标和杂波的分类效果较好,其中,对杂波点迹的识别率更高。从图中蓝色曲线可以看出,当竞争层神经元个数为46 时,雷达点迹的整体识别率为82.72%,此时的整体识别率最高,模型对目标和杂波均能够比较准确地分类。因此,竞争层神经元个数设为46。
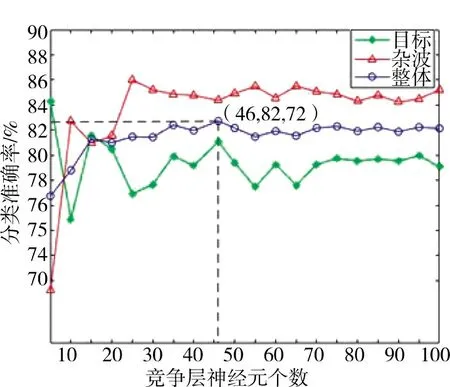
图11 分类准确率与竞争层神经元数量关系曲线Fig.11 Relation curve between classification accuracy and number of neurons in competitive layer
4.2 杂波抑制效果对比
确定了LVQ 神经网络雷达点迹分类模型的结构后,将学习率设置为0.1,均方误差设为0.1,最大迭代次数设为1 000 次,学习函数设为learnlv1。设置好的LVQ 神经网络如图12 所示。

图12 LVQ 神经网络雷达点迹分类模型Fig.12 Radar trace points classification model LVQ neural network
利用表1 中的24 000 个训练样本,对LVQ 神经网络雷达点迹分类模型进行训练,得到的训练结果如图13 所示。在第982 次迭代时,模型的均方误差最低,为0.181 17。

图13 LVQ 神经网络模型训练结果Fig.13 Training results of LVQ neural network model
利用训练好的模型对6 000 个测试样本进行分类,保留分类为目标的点迹,滤除分类为杂波的点迹。6 000 个测试样本在分类前的分布位置如下页图14 所示,图中红色点为真实的杂波点迹,绿色点为真实的目标点迹。LVQ 神经网络雷达点迹分类模型对测试样本的分类效果如图15 所示,图中蓝色点为将真实的目标误判为杂波的点迹,黑色点为将真实的杂波误判为目标的点迹。滤波后的效果如图16 所示,图中绝大部分的杂波点迹被滤除。
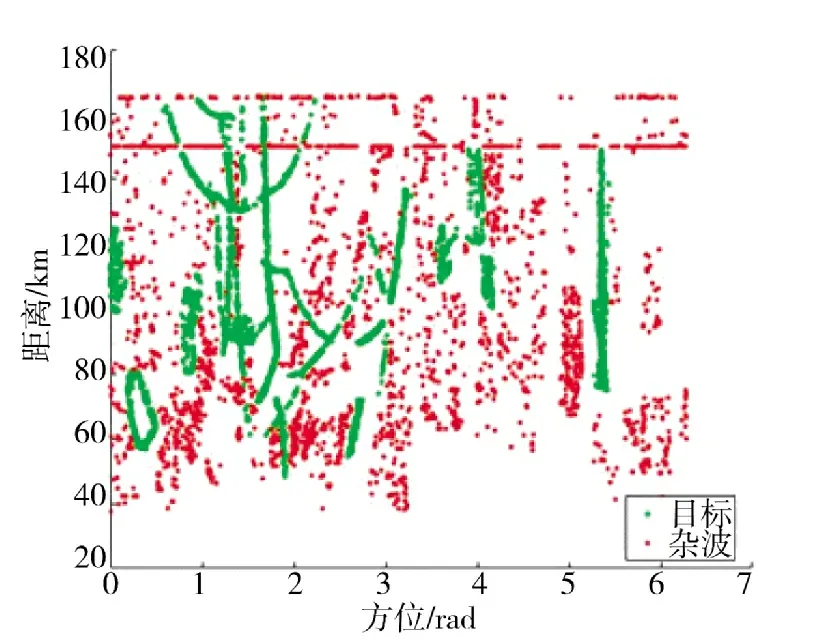
图14 测试样本空间分布Fig.14 Spatial distribution of test samples
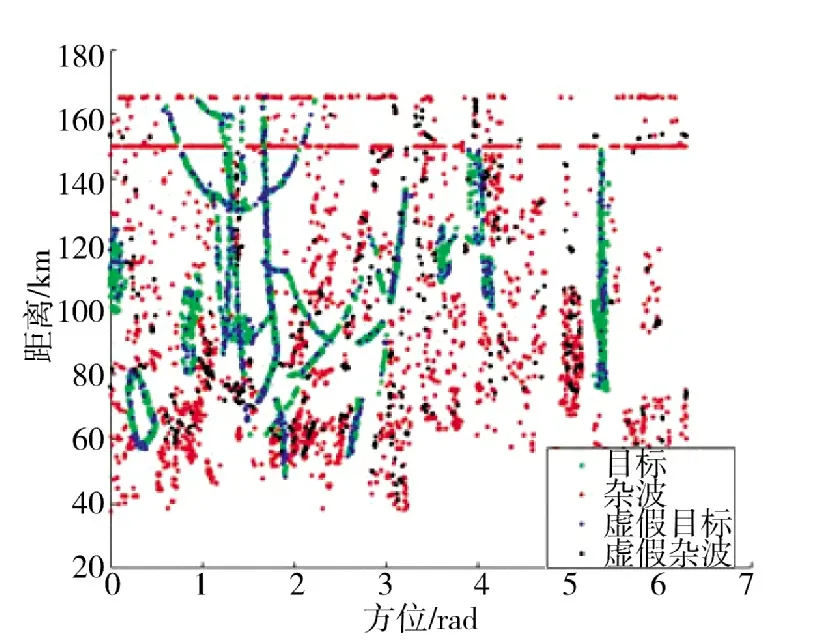
图15 LVQ 神经网络分类模型分类效果图Fig.15 Classification effect diagram of LVQ neural network classification model

图16 滤波后效果图Fig.16 The effect diagram after filtering
对测试样本的分类结果与测试样本的真实类别进行比对,得出准确率。同时,将本文的LVQ 神经网络雷达点迹分类模型与文献[16]中的BP 神经网络模型的分类准确率进行对比,如表2 所示。由表2可知,本文所提方法的杂波点迹分类准确率和整准确率更高,杂波抑制效果更好。
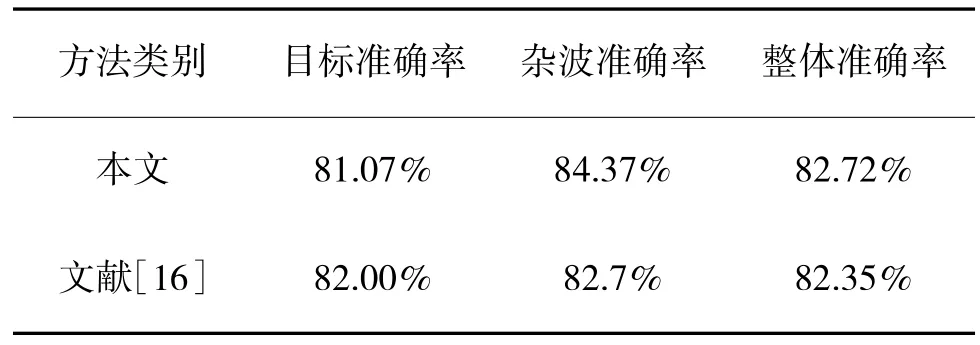
表2 两种方法的准确率对比Table 2 Comparison of accuracy of two kinds of methods
5 结论
本文针对雷达数据层存在剩余杂波的问题,提出了基于LVQ 神经网络的雷达杂波抑制方法。通过某型航管雷达的实测数据,对该方法的可行性进行了验证。由于模型的训练样本源于不同的气象条件,且测试样本分布在0~360°,40 km~160 km 的地理空间,涵盖了雷达阵地周围城镇、山脉、湖泊等多种地物环境。因此,可认为本文所提方法在不同地物和气象条件下,仍具有一定的适用性。该方法的杂波抑制效果较好,为雷达数据处理系统后续的航迹起始和航迹跟踪奠定了良好的基础。
