永磁同步电机有限时间抗扰控制方法研究*
2023-06-01胡成琳
邵 欣,胡成琳
(天津中德应用技术大学智能制造学院,天津 300350)
0 引言
随着工业机器人等高端装备的发展,永磁同步电机(permanent magnet synchronous motor,PMSM)以其突出的控制性能受到了广泛关注,并且大量应用于交流驱动应用中。随着研究的深入和经验的积累,在永磁同步电机的控制特性和机械特性等方面已经得到了丰富的研究成果。然而,快速变化的不确定负载、变频器损耗、磁饱和和其他非线性效应在高度使用的实际驱动系统中经常发生,由于应用系统中快速变化的未知干扰和未建模动态特性,永磁同步电机伺服控制系统的精度和稳定性会显著降低,从而降低整个系统的性能,尤其是在无传感器控制系统应用中。已有的研究成果表明[1-5],通过补偿逆变器的非线性效应,可以减少位置估计误差。此外,ZHAO Y 等讨论了基于磁通量估计和扩展电动势估计提高精度的方法[6-7];KIM H 等通过使用参考转矩作为观测器的前馈输入,提出了一个具有改进带宽的零相位滞后估计器[8];LEE Y 等则在研究中提出了一种利用速度误差消除负载干扰的增强型鲁棒性估计器[9]。对于基于模型的控制方法,通过扩展电动势的估计是最基本的算法之一,经典的技术是通过正交锁相环(Q-PLL)跟踪估计反电动势的相位和频率[10-13],但其核心缺点是速度和负载变化时的恒定带宽、时变干扰估计能力不足。因此,无传感器控制方法仍然容易受到外部干扰的影响,需要进一步改进。
对于具有未知扰动的伺服系统,扩张状态观测器(extended state observer,ESO)是一种有效的估计技术,其具有快速收敛、不需要精确的数学模型和对未知干扰的精确估计等特点。为了提高永磁同步电机的控制精度,可以引入ESO 对未知扰动和未建模动态进行观测。ESO 的最初概念是由HAN 提出的,他还提出了自抗扰控制(active disturbance rejection control,ADRC)理论[14]。ADRC 从理论上将系统的所有不确定因素视为总扰动,作为ADRC 的核心部分,ESO 利用估计误差对总扰动进行观测[15-18]。继HAN的概念之后,GAO Z 进一步提出了对非线性形式ESO 进行线性化和参数化的工作[19-23],提出了用于快速跟踪扰动和不确定性的最佳观测器带宽概念和方法[24-25]。在参数调整和理论分析方面,线性扩张状态观测器(linear ESO,LESO)要优于非线性ESO[25]。非线性ESO 在干扰容忍度和动力学改进方面更为有效,然而,参数调整和分析相当困难,这方面的研究工作也不充分。由于LESO 和非线性ESO各有其优点和缺点,在它们之间进行选择成为一个困难的选择。
针对这一问题,为充分利用非线性特性的优势,本文提出了一个三阶超螺旋ESO(super-twisting ESO,STESO),以改善永磁同步电机驱动器的动态性能和对速度与负载突变的鲁棒性,同时估计快速变化的不确定性并抑制颤动。STESO 具有传统扩张状态观测器的优点,而且可以保证估计误差的有限时间收敛性。与已有的研究结果相比,本文的STESO 可以提高对总扰动变化的动态响应,而且克服了LESO 存在观测误差和收敛速度较慢等问题,动态性能得到改善,低速运行极限得到了扩展。本文分析了STESO 的有效性和稳定性,通过对比分析和仿真实验证明了其性能的优越性。
1 永磁同步电机数学模型
对于永磁同步电机,其三相定子电压方程可以表示为:
式中,ua、ub和uc为定子绕组的相电压;ia、ib和ic为定子绕组电流;R 为定子绕组的相间电阻;ψa、ψb和ψc为绕组磁链,其表达式为
式 中,Laa、Lbb和Lcc为 定 子 绕 组 自 感;Mab、Mac、Mba、Mbc、Mca和Mcb分别为三相绕组之间的互感;ψfa、ψfb和ψfc为转子磁体在三相绕组产生的磁链,可表示为
式中,θe为电角度,即电机转子直轴磁极线与绕组a相轴线的夹角。根据永磁同步电机的三相电流和磁链,可以得到电机产生的电磁转矩为:
式中,pn是电机转子的磁极对数。经过Clarke 变换,可得电磁转矩的表达式为:
进而可以得到永磁同步电机的运动方程为:
式中,TL为负载转矩;J 为负载转动惯量;ωr为转子角速度;B 为摩擦系数常数。对永磁同步电机的数学模型进行整理,得到:
2 控制器设计
由于永磁同步电机的感应电动势包含重要的位置和速度信息,传统的基于模型的无传感器控制方法主要利用该原理实现永磁同步电机位置和速度的估计。如图1 所示,前端用于通过定子电压基准和测量电流iαβ来估计扩展电动势;后端用于检索估计的电气位置和速度,而且后端通常采用Q-PLL 使位置误差可以持续降低到0。

图1 永磁同步电机位置和速度估计框图Fig.1 Position and speed estimation block diagram of PMSM
以上方法需要在伺服系统中加入低通滤波器去除高频噪音,这在实际位置和估计值之间引入了不必要的相位滞后,降低了整个系统的性能。针对该问题,本文设计了STESO 进行位置和速度估计,以获得更准确的速度估计信号和更强的干扰估计能力。Super-twisting 算法利用分数阶函数的非线性特性提高了观测带宽,具有很强的噪声抑制能力。
2.1 STESO 设计
针对具有参数不确定性的永磁同步电机,其动力学方程根据式(7)可以表示为
式中,a 为总扰动变化率。据此设计永磁同步电机的STESO 为
将式(10)减去式(11),可以得到观测误差方程为
在式(12)收敛时,则可以实现总扰动的准确观测。为便于后续分析,需要根据永磁同步电机的机械特性做出如下假设:
假设1 不确定性f 是有界的,而且其导数满足
针对式(12),有如下定理:
定理1 在d 有界时,通过调节误差反馈增益αi,可以保证式(12)在有限时间内收敛到0。
证明:建立Lyapunov 函数
根据Pólya 定理[27]可以确定使V(x)正定的参数ki。对式(14)求导,得


2.2 反馈控制律设计
基于STESO 对总扰动的观测值,可以实现在控制系统中对f 的精确补偿,从而设置位置环误差反馈控制律
式中,pr和qr分别为位置和速度给定值。在单独控制速度时,控制律设计为
3 仿真结果分析
为验证本文所提出的控制方法的有效性,搭建PMSM 仿真模型以进行验证,并设置传统PI 控制方法进行比较。其中,仿真所用电机参数设置如下:定子电阻R=0.75 Ω;电感Ld=1.05 mH;Lq=2.05 mH;极对数pn=4;转动惯量J=2.4 kg·mm2;额定电压U=24 V。本文所提控制方法可以通过式(12)、式(17)和式(8)实现。其中,控制参数设计为b0=5.6×104;kp=15;kd=113.1;L=12 000。为验证所提方法的有效性和控制优势,本文选择PID、自抗扰控制(ADRC)[28]和基于改进模型预测的自抗扰前馈控制(feed forward ADRC,FFADRC)[29]等3 种算法进行对比分析。其中,PID 控制器的参数为位置环控制参数kpp=15,速度环PI 控制参数为ksp=0.15,ksi=0.74;线性自抗扰控制器的参数为β1=3 200,β2=1 800 000,ω0=1 720,k=705.2;模型预测自抗扰控制的参数为加权系数q=0.23,Ki=500,l=0.47,模型预测自抗扰控制的速度环PI 参数与PID 控制器相同。电流环在本文方法和对比控制方法仿真中的参数一致,其PI 控制器的参数为kip=8.12,kii=11 802。永磁同步电机控制结构图如图2 所示。

图2 永磁同步电机控制框图Fig.2 PMSM control block diagram
3.1 位置控制
位置控制是永磁同步电机控制的重要任务之一,在不同的负载作用下,如何设计控制器使永磁同步电机快速到达指定位置,并将负载变化带来的影响降到最低。仿真中,给定目标是控制永磁同步电机转动100 圈,负载转矩设置为TL=0.01 Nm,仿真结果如图3 所示。由图3 可知,本文所提的控制方法在启动过程中没有超调,在1.210 s 时到达设定位置;而对比方法跟踪参考所需时间分别为1.231 s、1.225 s、1.281 s,比所提控制方法慢0.015 s 以上。在转速控制上,本文所提方法可以快速无超调地达到设置转速,响应速度较快。其余对比方法的速度环在本次仿真的负载条件下响应速度慢于本文方法,到达设置转速的时间均大于本文方法的0.034 s,落后时间在0.051 s 以上,从而证明了本文方法在位置控制方面具有更高的控制性能。
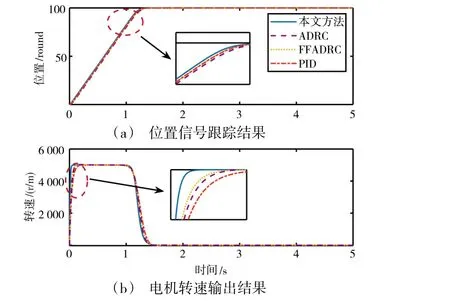
图3 位置控制结果Fig.3 Position control results
为分析不同负载对控制结果的影响,图4 所示的仿真结果对比了负载TL为0.001、0.008、0.01、0.015、0.02 等多种情况,仿真结果显示,虽然不同仿真时负载不同,但由于STESO 对总扰动的观测和补偿能力,实现了控制器对负载产生的影响进行了精确补偿,从而使控制结果保持一致。同时需要指出,传统的PID 控制在负载变化时控制效果变化较大,限于篇幅本文未给出其仿真结果。

图4 多种负载位置控制结果Fig.4 Position control results of multiple kinds of load
3.2 转速控制
为充分验证本文所提控制方法的控制有效性,本节从电机空载起动和阶跃负载扰动抵抗能力两个方面展开系列仿真。首先是固定转速情况,在第1.5 s 加载扰动为0.004 Nm 的阶跃力矩。如图5所示,设定转速为1 000 r/m 的空载启动,本文方法和对比方法都可以控制永磁同步电机达到设定转速,但在动态性能上却存在较大差异。其中,本文所提方法的响应时间为0.06 s,转速无超调,而速度环采用PI 控制器时的响应时间为0.11 s,而且还存在一定的超调,最大超调转速为12.4 r/m,超调量为1.24%。相比之下,ADRC 和FF-ADRC 控制方法的转速响应速度有一定的提高,但仍然慢于本文所提的控制方法。由图5 的对比分析可知,本文方法在启动阶段具有良好的快速性。在加入负载阶跃扰动后,图5 结果显示4 种控制方法所对应的转速曲线均出现了下降,相比之下,本文方法的最大偏离值为52.1 r/m,约为给定转速的5%;而PI 转速控制器对应的转速损失为302 r/m,约为给定转速的30%,另外两种控制方法的转速下降约为7%,与本文方法接近。但在恢复时间方面,本文所提方法转速恢复时间分别为0.055 s,低于PID 控制的0.88 s、ADRC 的0.143 s 和FFADRC 的0.094 s。综合上述仿真现象可得,本文所提方法的转速变化量为PI 控制器的1/6,恢复时间约为1/16,而且相对于ADRC和FFADRC 在转速变化量和恢复时间方面均有一定的提升,证明本文控制方法对于变化的系统负载具有较好的抗干扰性能。
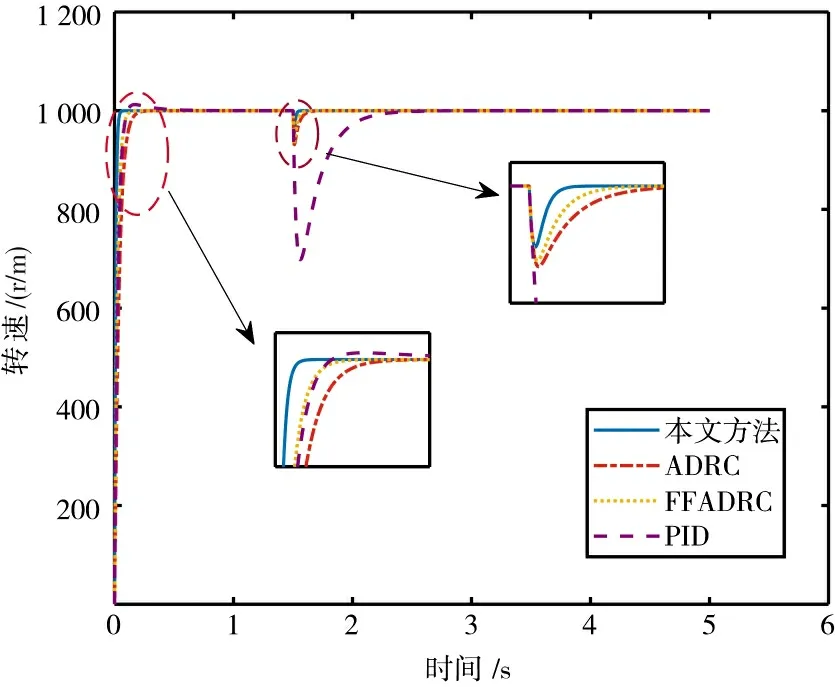
图5 转速控制结果Fig.5 Rotation speed control results
图6 为给定正弦波转速信号时候的仿真实验结果。如图所示,本文方法以及对比方法都可以很好的跟踪给定的转速信号,但通过转速放大图可知,本文方法的转速输出与给定转速波形最为接近,实验结果与图5 结果一致,本文控制方法在转速控制方面由于对比方法的结论从转速误差结果中可以得到进一步验证。其中,本文方法输出的正弦转速误差幅值为0.11r/m,远小于另外3 种控制方法的0.29 r/m、0.27 r/m 和0.42 r/m。
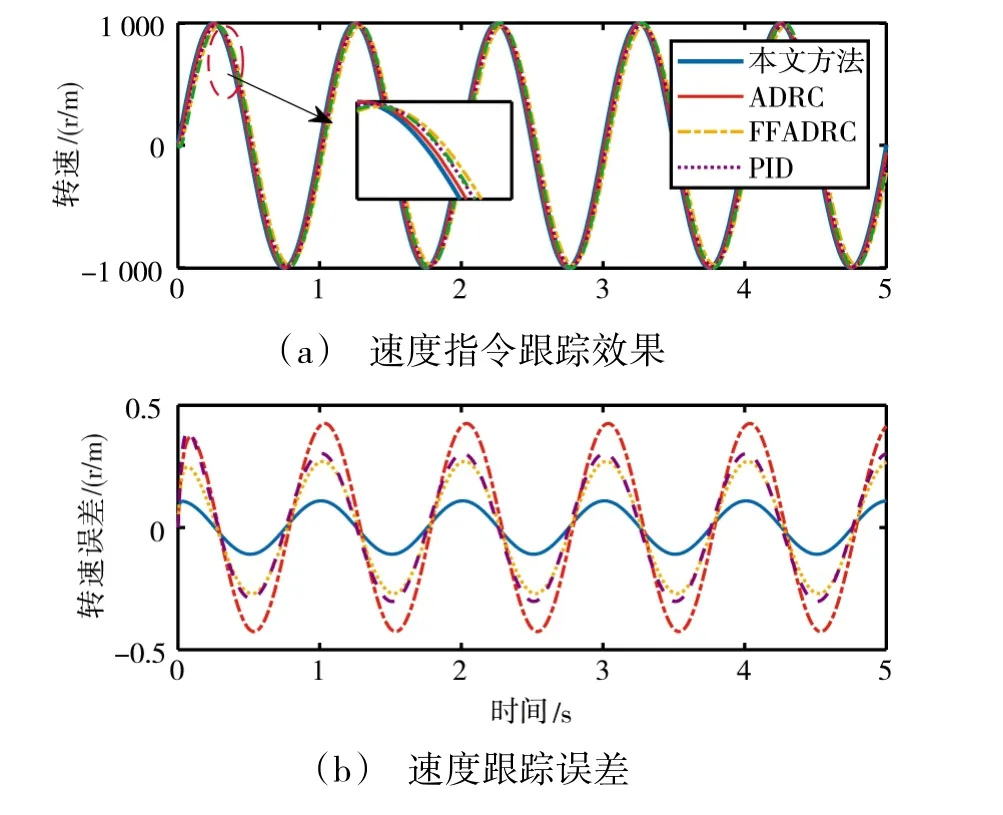
图6 正弦转速信号控制结果Fig.6 Signal control results of sinusoidal rotation speed
3.3 蒙特卡洛测试
在STESO 中,所有的参数不确定性均被视作扰动放在了总扰动中,并通过STESO 在有限时间内进行准确观测。为验证本文所提控制方法对系统参数变化的可能干扰能力,在仿真中设置转动惯量定子电阻、电感、转动惯量和反馈电动势系数在内变化,仿佛在条件同样设置为在1.5 s 是施加0.004 Nm 的阶跃扰动。仿真结果如图7 所示,50 次蒙特卡洛测试结果显示虽然系统参数在每次仿真都不相同,但控制结果变换结果较小,从局部放大图可知所有的控制过程均未出现超调,过渡时间也只有0.02 s 的变化,从而验证了本文所提控制方法在模型失配情况下的鲁棒性。
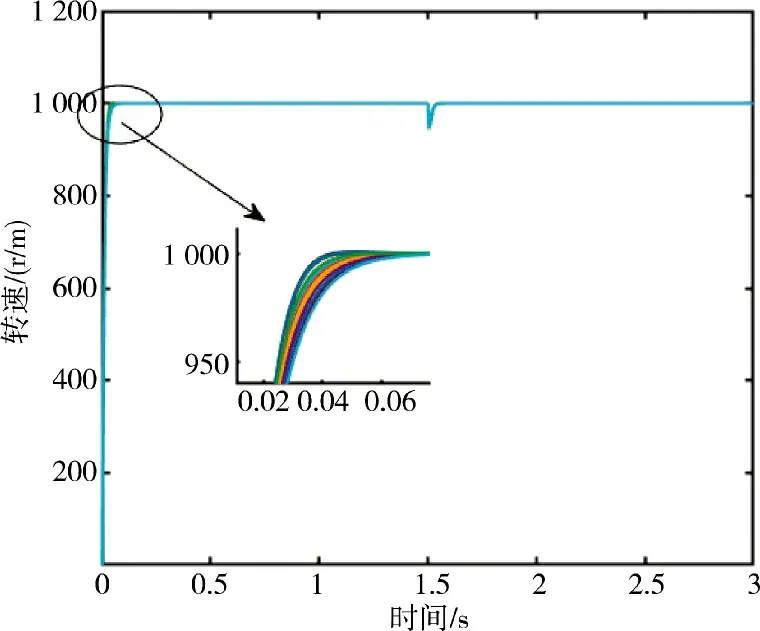
图7 蒙特卡洛测试Fig.7 Monte Carlo test
4 结论
针对永磁同步电机的控制问题,本文进行了扰动观测与补偿控制研究,获得的结论如下:
1)提出了一种三阶STESO,可以在有限时间内实现位置、转速以及总扰动的准确估计,从而可以在控制回路中对总扰动进行精确补偿,提高系统的控制性能和抗扰能力。
2)通过仿真实验结果将本文方法与PID、ADRC 和FFADRC 等控制方法进行了比较,从而验证了基于STESO 的控制器的优越性能。
3)STESO 增强了总扰动的估计能力,提供了抗快速和负载变化的思路,而且从理论上保证了有限时间收敛性。
对永磁同步电机总扰动的准确观测与补偿,可以提高永磁同步电机的位置和转速控制精度,同样为进一步研究提供了新思路。在未来研究中,将在此基础上研究非线性误差反馈控制方法,以期进一步提高控制系统的综合性能。
