基于虚实结合的便携式装甲模拟训练系统研究
2023-06-01黄海英朱元武魏洁英温永强
黄海英,朱元武,魏洁英,罗 浩,温永强
(北方自动控制技术研究所,太原 030006)
0 引言
军事训练是国防建设和军事斗争准备的重要方面,主要有实装训练和模拟训练两种方式[1]。随着虚拟现实技术的发展和应用,模拟训练以其安全、易组织和高费效比的优势成为和平时期战斗力生成的主要训练方式,特别是在信息化体系作战的训练需求下,模拟训练成为面向解决联合作战训练问题的一种有效方案[2]。作为联合作战训练下的重要一环,装备综合模拟器设计正朝着精益求精的方向发展,通过对装备操控空间布局、操控流程和武器性能的高度还原,提供与实装训练高度贴近的训练体验[3]。在车内空间布局三维模型的基础上,以实装为依据,设计大小、功能、力感等特性与实装一致的操控硬件,通过对车辆运动学、动力学,弹丸发射轨迹研究,构建实装性能仿真模型,实现对武器装备性能的模拟,结合场景驱动和实时生成技术,可以搭建高逼真“人在环”战场环境,提供视觉、听觉和力感的真实感受,满足部队训练需要[4-6]。随着新形势下战争模式的转变,训练模式也从传统的单兵、单武器、单平台作战转变成了集侦察、指挥、火力、保障于一体的体系作战模式,为适应庞大的模拟训练体系规模,综合经济效益和灵活训练需要,装备综合模拟器朝着更加便携的方向发展,装甲分队是陆军作战的重要力量,对装甲综合模拟器小型化、轻量化、便携式设计具有重要的意义。
针对联合作战背景下分队训练的发展需求,提出一种基于虚实结合的便携式装甲模拟训练系统设计,采用虚实结合的方式构建空间布局,在实物操作部件的基础上,构建车内结构模型并补齐操控要素,实现对实装操控环境的模拟。系统通过硬件虚化的方式,减少了硬件的数量,并在满足功能和性能需求的基础上,选择轻量化材料,控制在单兵可携带的范围,此外,采用VR 头盔与数据手套等虚拟现实设备,可以提供高沉浸训练体验,可支持单兵技能训练和分队战术训练。
1 总体设计原则
便携式装甲模拟训练系统能够合理继承现有技术优势,在实现装备操作流程和性能模拟的基础上,采用虚实结合的方式进行操控空间设计,同时,充分考虑通用化、模块化、轻量化和拓展性要求[7],通过统一产品架构、接口协议和通信协议,在设计方案中寻求最佳实现途径。
1)自顶向下原则:充分分析系统的功能需求和工作方式,采用顶层设计思想,自顶向下逐层分解系统的专业技术训练、单车合练和分队战术训练使用方式和功能需求,进行软硬件架构设计和模块划分;
2)硬件设计原则:硬件设计遵循相关国家标准,依据结构化、可复用的设计原则,对具有相似功能的部件采用标准化和互换性设计。在结构设计上,在保证整体强度和可靠性的基础上减少冗余结构,做简做精。在材料选择上,选择重量较轻的替代材料,尽可能降低重量;
3)可拓展原则:交互设计中预留充足的接口,接口用途和定义明确,建立具有较强扩展性、兼容性和可靠性的通信协议标准,明确通信传输协议中的语法、语义、定时规则,实现系统之间高实时性、低丢包率的数据交互;
4)虚实结合原则:以虚实结合的方式构造与实装一致操控空间,基于系统的功能需求和使用情况,对影响沉浸感的关键要素进行实物设计,如驾驶员操纵台(转向、油门、制动、变速操纵装置)、炮手操纵台和车长操纵台等,其他操控元素以虚拟控件的形式补齐,通过虚实结合的设计,可以实现训练装备的小型化、轻量化。
2 实装性能仿真建模
2.1 驾驶性能仿真建模
驾驶性能是武器装备的核心性能之一,其仿真程度直接影响到整个系统的逼真度和沉浸感,驾驶性能仿真主要实现发动、起车、换挡、变速、转向、制动、停车、熄火等操作过程模拟,基于高逼真的车辆三维模型和实装的性能参数,建立车辆运动学和动力学仿真模型,能够真实模拟车辆动力系统、传动系统、行驶系统和车身运动参数。
针对装甲车辆的性能特点,结合车辆结构分析和仿真功能实现,兼顾模型构建和实时解算的需求,将驾驶模型分为发动机模型、传动系统模型、行驶系统模型、转向系统模型和车身动力学模型5 个部分构建,其解算过程如下页图1 所示,发动机模型将油门信号转化为发动机扭矩,通过传动系统中一系列的齿轮啮合形成不同的传动比来增加从发动机传到驱动车轮的转矩并降低转速,通过左右轮驱动力矩的分配,可以实现两侧车轮转速不同,车辆运动过程中,车轮轮胎与地面的摩擦力可以控制车辆的加速、减速和转向等运动,实现运动控制。将换挡、转向、制动等信息输入到模型,可以实时解算为车辆实时动态姿态,实现车身位置、方位及其速度变化模拟功能和车身对路面响应模拟的功能。
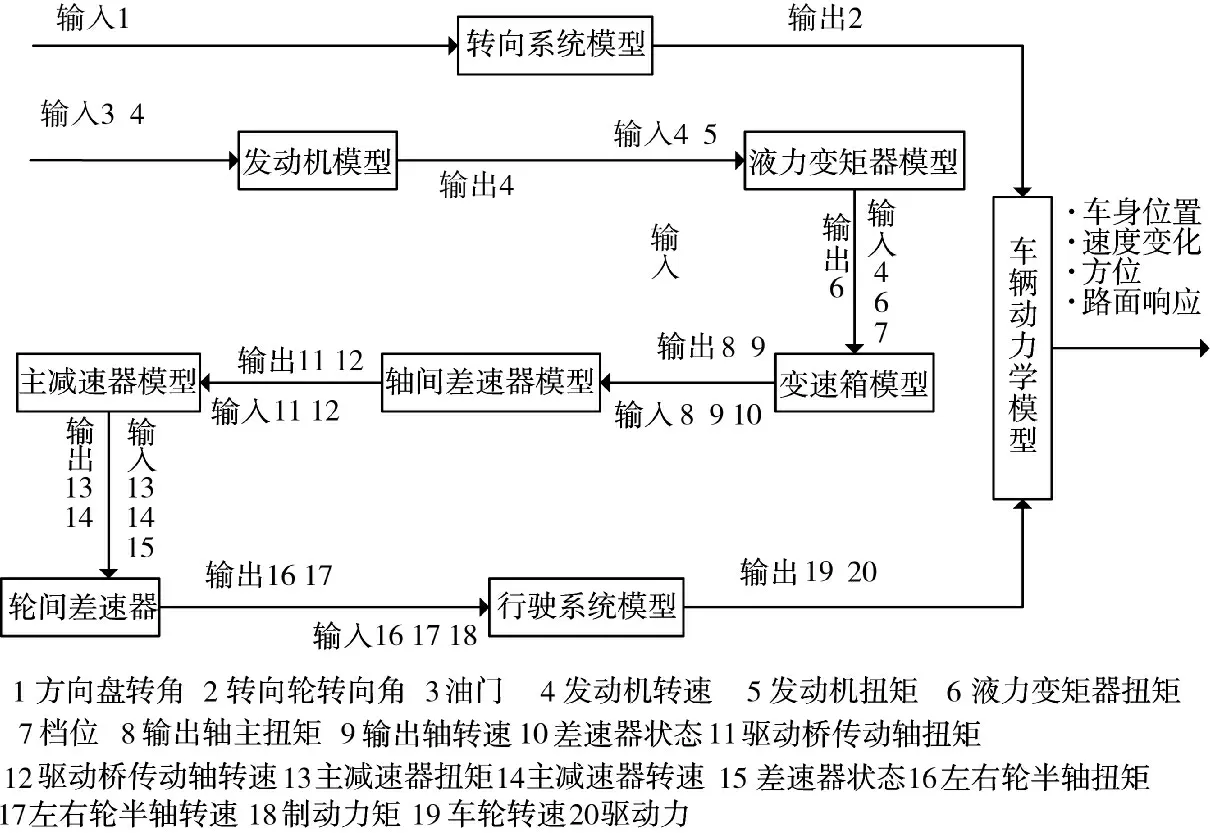
图1 驾驶模型运行流程Fig.1 Operation process of driving model
2.2 射击性能仿真建模
射击性能是主战装备的关键性能,是其主要的战斗力体现,射击性能仿真是对射手射击操作流程及其特点的仿真,实装真实性能与仿真结果的拟合程度不仅影响操作过程中的沉浸感,而且直接影响系统的训练效果。射击性能仿真包括:搜索目标、瞄准、激光测距、装弹、射击等操作过程模拟,以及对火炮飞行轨迹效果仿真等。通过构建与实装一致的操纵速度曲线,模拟实装上射手操纵瞄线时的真实感受,基于控制面板装置实现射击控制过程,通过基于射表的差值拟合方法,求出火炮高低和方位射角等射击诸元,并结合弹道仿真模型,完成对火炮飞行轨迹的仿真。
2.2.1 构建与实装一致的操纵速度曲线
在装甲装备上,射手通过操纵台控制瞄线和火线转动来搜索可疑目标,为了还原这一操作过程的真实感受,系统建立了与实装一致的操纵速度曲线,曲线按照操纵台转动角度与瞄准速度的关系可分为4 个区,分别为死区、精瞄区、调转火力区和最大调炮区。精瞄区内瞄线转动速度随操纵台转动角度的变化速度慢,用于射手精确瞄准目标并对目标进行射击;调转火力区内瞄线转动速度随操纵台转动角度的变化速度快,用于射手快速调转火力,搜索发现目标,操纵速度曲线如图2 所示。其中,vmin为最小瞄准速度;vmax为最大调炮速度,最小瞄准速度和最大调炮速度与实装一致。
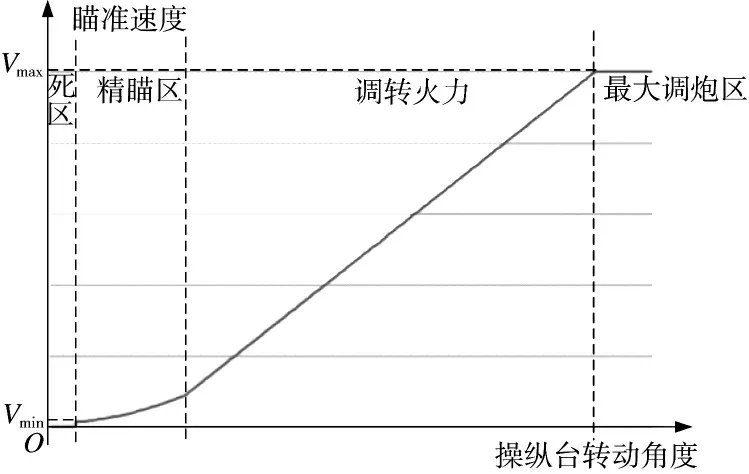
图2 操纵速度曲线图Fig.2 Control speed curve
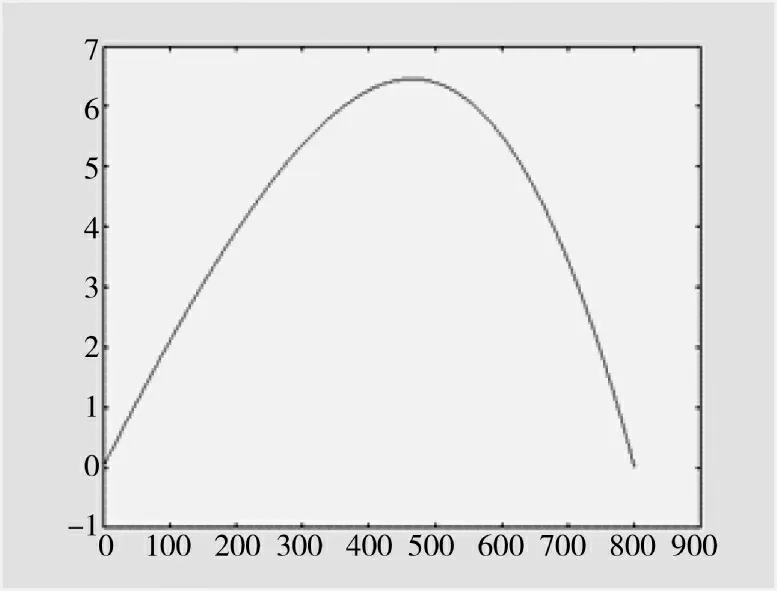
图3 弹丸飞行距离-高度曲线Fig.3 Flight distance-height curve of projectile
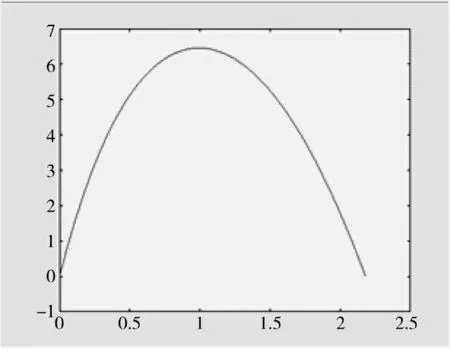
图4 弹丸飞行时间-高度曲线Fig.4 Flight time-height curve of projectile
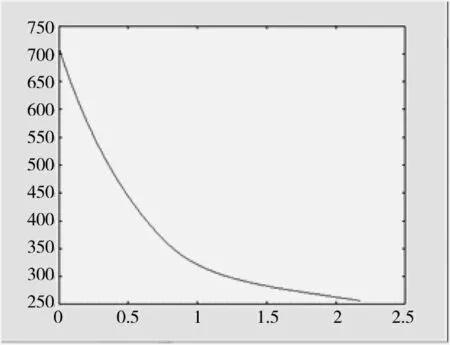
图5 弹丸飞行时间-速度曲线Fig.5 Flight time-speed curve of projectile
2.2.2 基于射表的插值拟合方法计算射击诸元
诸元解算用于目标测距后计算火炮高低、方位射角和弹丸飞行时间等信息,其思路是根据弹丸坐标、测距距离、弹种、装药、气象条件等,得到火炮与目标的综合距离,通过对射表进行插值拟合的方法,结合横风、目标运动速度等,最终得到当前目标测距下的火炮高低和方位射角。其计算过程如表1所示。根据气温修正、海拔修正的公式得到当前射击条件下的综合距离,根据综合距离能够从射表中插值拟合弹丸在有效射程内的射击诸元。
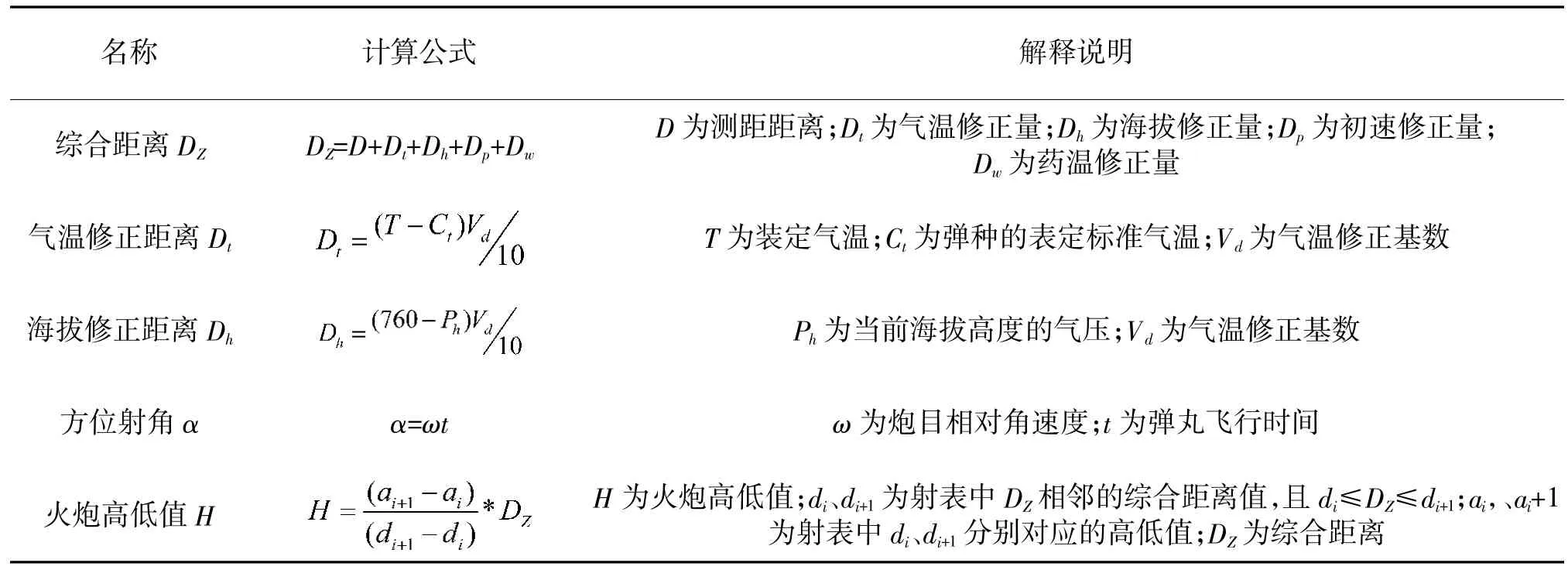
表1 射击诸元计算列表Table 1 Calculation list of firing data
2.2.3 基于动力学的弹道仿真
外弹道仿真大量应用于作战仿真和模拟训练中,其仿真算法性能和精度高低直接影响系统的训练效果。由于受到弹丸初速、旋转角速度、发射角度、质量、形状、重力、空气阻力、风力及偏流等诸多因素的影响,弹丸的飞行轨迹是一条非常复杂的空间曲线。为了提高弹道仿真的可信度,系统采用解弹道方程组的方法建立弹道仿真模型,充分考虑弹丸出膛后各种扰动因素,并依据射击时的气象报文、射击诸元等信息,实时调整弹道解算动力学模型。以直瞄类武器弹道仿真为例,建立弹丸局部坐标系和大地坐标系,运用文献[8]的方法进行坐标转换,由于直瞄类武器的有效射程大都在4 000 m以内,在弹道解算过程中,不考虑科氏惯性力、地球自转、地表曲率等因素的影响。非标准气象条件下,外弹道模型的弹丸质心运动微分方程为:
其中,vx、vy、vz为弹丸在三坐标轴方向的速度分量;Cb为弹道系数;H1(y)为空气密度函数;g 为重力加速度;G(vr,C1)为阻力系数;vr为弹丸飞行速度;C1为声速;wx、wy、wz为风的速度分量。通过输入弹丸初速、初始射角、温度、气压以及炮口坐标等信息,定义时间步长,可以得到不同时间弹丸存速和坐标信息,结果表明,基于动力学的弹道仿真模型与现实弹丸飞行轨迹高度拟合,算法简便易行,符合实时解算的需求,在模拟训练领域具有很好的应用效果。
2.3 指挥通信仿真建模
随着信息化的发展,指挥通信发挥着越来越重要的作用。对于具有车长射击功能的装甲装备来说,指挥通信仿真建模包括对车长独立观察、指示目标、超越射击和指挥通信等操作过程的模拟。系统通过两个方面来实现指挥通信性能的模拟:一是通过虚实结合的方式,对车长操纵台、车长综合显控终端、车长操控面板和车长显控终端等操纵部件进行模拟,进而实现与实装一致的操控逻辑控制;二是通过采用Okumura-Hata 信道质量计算模型,综合考虑了气象环境、地形、通信距离、电磁干扰等因素对通信的影响,实现作战过程中通信效果模拟。其功能实现如下页图6 所示。车长通过操作虚拟模型(车长综合显控终端、车长操控面板和车长显控终端)和实物模型车长操纵台等操控部件,将操控信息通过训练网络实时发送给射击控制软件和视景仿真软件,其中,射击控制软件根据操控信息实现与实装一致的火控系统逻辑控制,视景仿真软件提供训练所需的终端界面仿真、视景仿真和通信仿真,进而实现车长指挥通信操控过程的模拟。
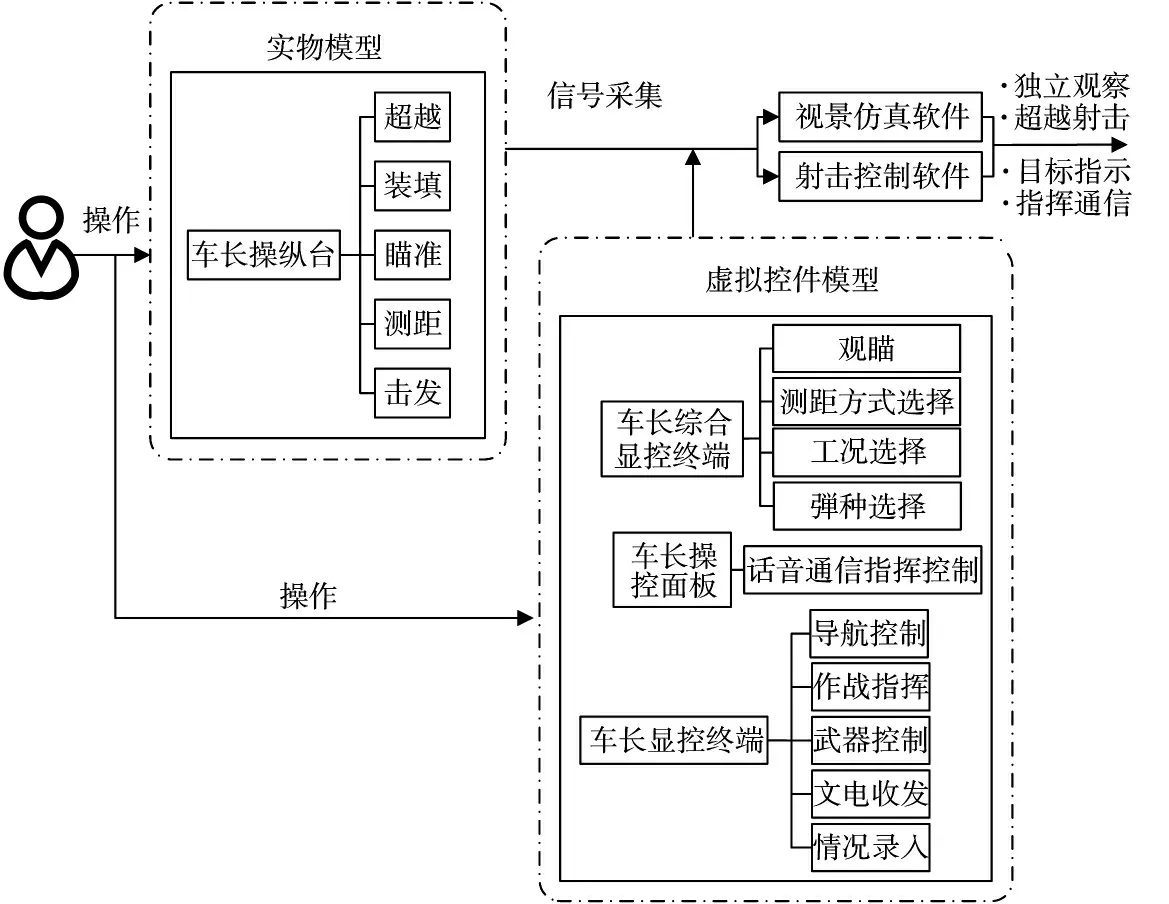
图6 指挥通信仿真运行流程Fig.6 Operation process of command and communication simulation
3 总体方案设计
3.1 总体设计思路
便携式装甲模拟训练系统的总体设计思路是:采用虚实结合的方式,构建基于实物操纵部件和虚拟控制面板相结合的操控环境,根据系统的功能需求和使用情况进行主要操纵的设计,并使其外形、功能和力感与实装保持一致,主要包括驾驶员操纵台(转向、油门、制动、变速操纵装置)、炮手操纵台和车长操纵台,其余操纵要素以虚拟控件的形式呈现,并通过虚拟现实设备(VR 头盔和数据手套)提供所需要的听觉、视觉和人机交互感受,用于沉浸式操作流程体验的实现。为了满足单兵携行需要,所有硬件设备可布置在同一携行箱中,其中,实物操纵部件与携行箱为一体化设计,训练过程中,实物操纵装置通过伸缩结构形成与实装一致的位置布局,所需的高度通过折叠装置实现。其驾驶员席位示意图如图7 所示。

图7 驾驶员席位示意图Fig.7 Sketch map of driver's seat
3.2 系统组成
3.2.1 硬件设计
便携式模拟训练系统由导调控制端、驾驶员席位、射手席位和车长席位组成,可以分成实物操纵部件和虚拟现实设备两种,采用背负式便携的方式,将设备放到便携箱内可单兵携带使用,支持单席位技能专业训练、单车合练和分队组网训练。其硬件组成和连接如图8 所示。
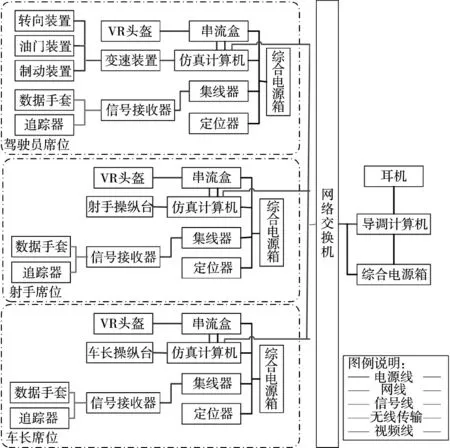
图8 硬件连接关系图Fig.8 Diagram of hardware connection relationship

图9 驾驶操纵装置、射手操纵台Fig.9 Driving control device and gunner’s console
1)实物操纵部件
实物操纵部件包括驾驶员操纵台、射手操纵台、车长操纵台。在操作使用方式、力感以及外形上与实装尽可能接近的情况下,做小做轻,使其更加方便携带。
驾驶员操纵台包括转向操纵装置、油门、制动操纵装置和变速操纵手柄,具有与实装一致的外形和尺寸,用于模拟实装驾驶操纵台的主要操作流程,可以实现变速、换挡、转向、制动等操作动作过程模拟。
射手操纵台模拟设备由左右手柄、壳体、水平回位机构、俯仰回位机构、水平信号传感器、俯仰信号传感器、模拟开关、指示灯及专用信号处理板组成,用于模拟实装射手操纵台的主要功能和操作动作过程,具有上电、方位向电动调炮、高低向电动调炮、火炮方位调零、火炮高低调零、击发保险、装弹、测距、枪击发、炮击发以及状态指示等功能。
车长操纵台与射手操纵台设计基本一致,在必要的时候实现超越射击功能,模拟实装车长操纵台的主要功能和操作动作过程。
2)虚拟现实设备
VR 头盔、数据手套是主要的虚拟现实设备,共同完成与虚拟环境的交互。经过对市场上虚拟现实设备进行比对分析,结合经济效益和系统功能需要,选用HTC 的VIVE Pro 型头盔和VRTRIX 数据手套。VR 头盔与数据手套本身不具备空间定位的功能,因此,需要与追踪器和定位器配套使用,可以实时捕捉头盔和双手的空间位置。训练过程中,包括训练场景和虚拟控件的虚拟操作空间通过VR 头盔反馈给参训人员,通过数据手套遍布全手的高性能传感器实时采集各指头关节运动数据,以获取操作时双手的动作姿态、开关按钮、挂挡摘挡、握紧方向盘等动作,结合定位器和追踪器,将操纵结果准确投影到相应虚拟控件上,实现与虚拟环境中各种设备的交互,其交互实现原理如图10 所示。
3.2.2 软件设计
便携式模拟训练系统主要由训练管控软件、训练管控客户端软件、驾驶视景仿真软件、炮长视景仿真软件、车长视景仿真软件、射击控制软件、通信仿真软件、VR 设备管理软件和信号采集软件组成。分别部署在基于Windows 7 系统运行的总控台计算机和各仿真计算机上,其功能和部署如下页图11 所示。
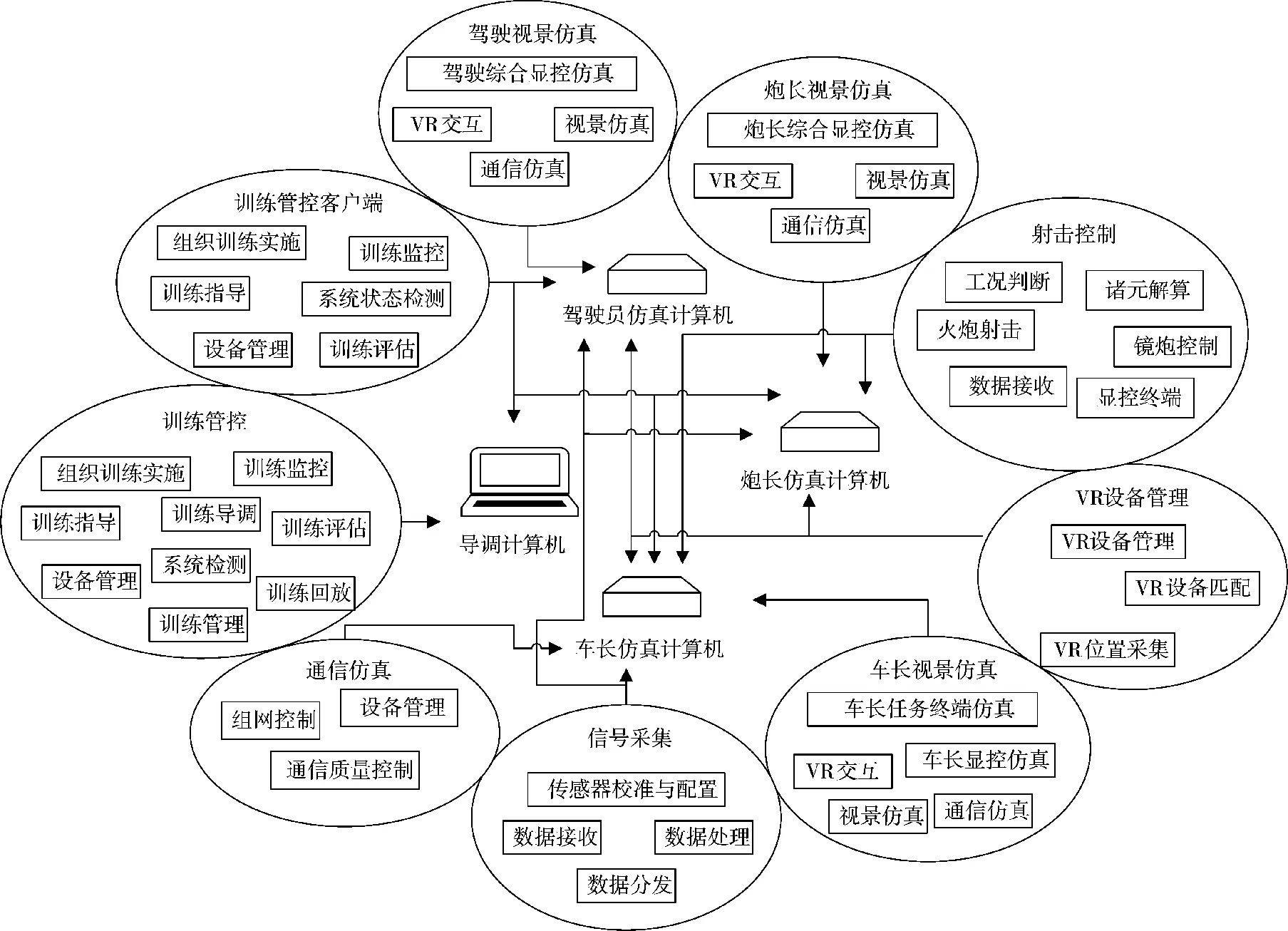
图11 软件功能及部署Fig.11 Software functions and deployment
在软件的实际应用中,要模拟装备在场景中的运动并实时显示,不仅要对开关、按钮、火控指令和通信信息等进行实时采集和处理,还要模拟训练过程中仪表、终端面板、指示灯等参数变化并实时显示,同时根据车辆参数、运行姿态等参数进行战场场景的实时渲染。各软件之间运行机制和信息交互如图12 所示。

图12 软件信息交互Fig.12 Interaction of software information
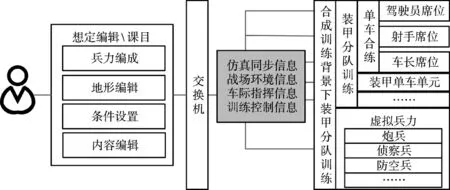
图13 战术模拟训练应用模式Fig.13 Application mode of tactical simulation training
训练准备阶段,训练管控软件将训练课目、训练条件、训练人员等基本想定信息发送到各训练席位的训练管控客户端软件,管控客户端软件接收、存储和处理数据发送给相应的视景仿真软件,课目加载成功。训练过程中,视景仿真软件接收信号采集软件采集的操纵台和VR 设备的硬件操纵信息,调用仿真模型和资源,解算车辆速度、运动姿态及火力状态信息,实时渲染车辆状态,实现虚拟现场下装备性能仿真,将相关性能参数发送到各席位客户端并在显控终端显示,训练结束后,采集成绩评估信息,通过成绩评估模型解算,进行成绩评估并下发。
4 应用模式
在一体化联合作战的训练背景下,以单专业技能训练为依托,牵引单车战术训练和分队训练。在单专业技能训练层面,系统在实装的依据下构建驾驶员、射手、车长3 个席位,支持单个席位进行专业技能训练,主要培养驾驶、射击、通信专业的技术能力;在单车战术模拟训练层面,将驾驶员、射手、车长3 个席位通过训练网络连接起来,单车合练通常以建制单位组织协同训练,在编辑训练想定时带有一定的战术背景,主要培养射手、车长和驾驶员之间的作战协同能力;在分队战术模拟训练层面,将多个装甲单车单元连接起来组成局域网,在训练过程中,组训人员可以根据训练内容和训练目的,设置作战地形、训练条件、兵力编成、武器装备以及虚拟兵力等构成训练想定,实现装甲分队战术训练,进一步可以增加炮兵、侦察兵、防空兵、工程兵等不同兵种的虚拟兵力资源,实施合成战术训练背景下的装甲分队模拟训练。
5 结论
针对联合作战背景下训练装备小型化、轻量化的需求,提出一种便携式装甲综合模拟训练系统,通过虚实结合的方式,提供实装一致的操作流程和力感体验,结合虚拟现实设备,补齐操控元素的同时提供高沉浸感,不仅提高了经济效益,还有效提升了训练质量。研究证明,该模拟训练系统更贴近实装战技能特点,结合VR 头盔和数据手套等虚拟现实设备的设计可以提供更高的沉浸感,对下支持不同环境单兵、单车战技能训练,对上牵引分队战术演练,通用化、模块化、轻量化和便携式的设计具有更加广泛的应用价值。
