基于改进NSGA-III 的抗饱和攻击防空编队部署方法
2023-06-01李珂铭李定主
李珂铭,李定主,石 昊
(北方自动控制技术研究所,太原 030006)
0 引言
现代空袭中,无人机与巡航导弹的使用在种类和数量上远远超过以往。如何应对大规模的无人机和巡航导弹混合攻击,成为当前防空领域的重要问题。
现有的防空体系基本实现了远中近、高中低的火力防空网,以及远侦、中扰的电子防空网,但如何在提升编队防御能力的同时,保证编队的生存能力一直是防空编队需要探索的命题。有些学者通过研究影响防空火力编队作战效能的各种因素,提出了区域掩护和目标掩护的编队部署方法,但是未考虑如何应对饱和攻击[1-3]。杨丹丹等通过对防空编队毁伤能力评估方法的研究,提出了抗饱和攻击的编队部署方法,但未考虑编队自身的生存能力[4-5]。丁佩元等考虑了多种影响防空火力编队作战效能的因素,提出了基于NSGA-III(nondominated sorting approach-Ⅲ)算法的部署方法[6]。NSGA-III 算法发展于遗传算法框架,通过对各目标函数值进行非支配排序,平衡多目标函数间的制约关系,得到全局最优的非支配解[7]。本文以多个评估防空火力编队效能的因素为目标函数,求解部署方案,但未区分区域掩护和目标掩护,考虑因素不全面,也未考虑如何提升编队的生存能力。因此,如何应对饱和数量、多种空袭武器结合的攻击,同时提升编队的生存能力,仍是需要进一步探索的问题。
综上,在防空对抗体系中应当遵循“部署分散、火力集中”原则,以抗饱和攻击能力为考虑重点,确定防空火力编队作战效能的影响因素,如配置距离、配置间隔等;此外,为了提升编队的生存能力,可以采用区域掩护与目标掩护的混合部署策略,这种策略不仅可以提高编队的抗击能力,而且还可以增强编队的生存能力。
1 编队部署模型
防空编队在确定武器部署位置时,需要考虑到多个因素,主要包括武器到掩护目标、掩护区域边界的配置距离以及武器之间的配置间隔。而这些配置变量受到诸多因素的影响。例如,在计算配置距离时,需要考虑敌方投弹线、敌方空袭兵器速度以及我方防空武器的有效作战半径等因素。而在确定武器之间的配置间隔时,除了上述因素,还需要考虑到重点掩护区域的边界长度和掩护目标的掩护扇区等因素[7],如图1 所示。
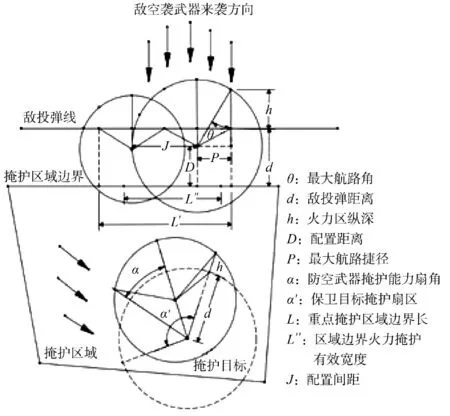
图1 防空部署因素示意图Fig.1 Schematic diagram of air defense deployment factors
为确定武器部署位置,以掩护区域几何中心为原点,建立直角坐标系。在计算配置距离时,需要考虑敌空袭武器来袭方向、最大航路角、投弹攻击距离,重点掩护区域的边界长度以及保护目标的掩护扇区等因素,从而确定武器到掩护目标、掩护区域边界的配置距离,以及武器之间的配置间隔。需要注意的是,在区域掩护与目标掩护下所要达成的掩护效果略有差异,因此,两种掩护下的装备配置距离和配置间距计算方法也有所不同。
在区域掩护下,首先需要根据我方火力装备的弹药射速、发射频率,以及敌空袭武器的速度、最大航路角、投弹攻击距离等因素,计算出我方火力区纵深和敌空袭武器的最大航路捷径,然后,根据重点掩护区域的边界长度约束,计算出我方火力装备的配置距离和配置间距。而在目标掩护下,首先需要计算出火力区纵深和敌空袭武器的最大航路捷径,然后根据保卫目标掩护扇区的约束,计算出我方火力装备的配置距离和配置间距。
2 编队部署方法
为了有效地应对敌方空袭,防空编队需要优先部署远程防空武器对区域进行掩护,但近年来的空袭战争表明,攻击方往往会优先攻击对方的地面远程防空火力,以瓦解对方整体保护伞,然后再对其他重要目标进行打击[8]。因此,在本文提出的防空火力编队部署方法中,已经部署的远程防空武器被视为重要的掩护目标,以保证整个编队的防御能力不被削弱。然后,通过使用中、近程防空武器对掩护目标进行保卫部署以及对区域掩护火力进行加强,进一步提高编队的防御能力。
在实际部署时,武器的配置距离以及配置间隔按照第1 章部署模型计算,但武器的具体部署位置仍需要进一步确定,例如,确定一个初始部署位置在重点掩护区域的边界附近,这是一个复杂的组合优化问题,通常使用遗传算法求解[9]。使用遗传算法时,需要设定目标函数和约束条件,以筛选出最优的进化种群解集。
评估防空编队性能的指标包括:防空武器弹药消耗量,防空武器火力重叠面积,防空武器火力覆盖总面积,远程防空武器有效保卫的掩护目标数量,中、近程防空武器在重点掩护边界上的有效掩护宽度,防空武器火力覆盖区域抗击能力。
2.1 目标函数
1)单位时间内标准弹药消耗量:
式中,mi为i 型防空武器单位的计划的拦截次数;ni为i 型防空武器单位一次拦截所使用的弹药数;zi为部署的i 型防空武器数量;vi为i 型防空武器单位所用弹药与某标准弹药成本比值;k 为防空武器种类数量(不包括高炮)。
2)火力重叠面积:
式中,SCji为第j 个防空武器与第i 个防空武器重叠面积,如图2 所示;Z 为防空武器单位数量。
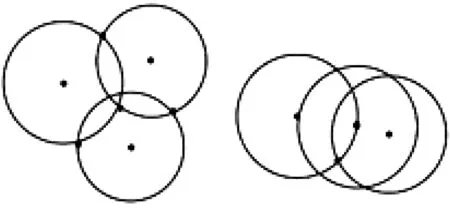
图2 防空武器火力重叠部署示意图Fig.2 Diagram of overlapping deployment of air defense weapons
3)火力覆盖面积:
式中,Si为第i 个防空武器火力覆盖面积;Z 为防空武器单位数量。
4)远程防空武器有效掩护的保卫目标数量:
式中,xji为第i 个掩护目标是否被第j 个远程防空武器有效保卫;hj为第j 个远程防空武器的火力纵深;Lji为第i 个掩护目标到第j 个远程防空武器部署位置的距离;Zy为远程防空武器数量;m 为保卫目标数量。
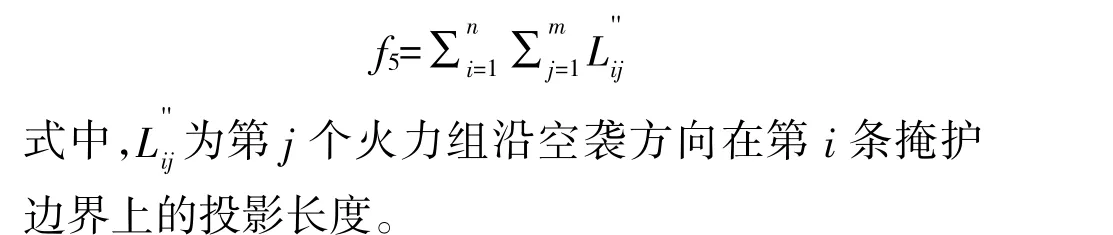
5)中、近程防空武器在重点掩护边界上的有效掩护宽度:
6)防空武器火力覆盖区域抗击能力,其定义为一定空袭强度下的敌空袭武器在防空火力覆盖区域内一点被打击命中的概率,敌我攻防服从M/M/e/e/N/FCFS 损失制排队模型[10],一般表达式为:
式中,Po(x,y)为火力覆盖区域内某一点的综合抗击率;U 为火力覆盖总区域;λi为i 型空袭武器的空袭强度;Z 为某区域中防空火力种类;μj为j 型防空武器射击强度;zj为j 型防空火力的数量;Pˉij为j 型防空武器对i 型空袭武器的命中概率。
2.2 约束条件
1)地形约束,具体部署时应该将待部署地域根据实际地形划分可部署点与不可部署点。
2)资源数量约束,对防空武器资源的使用,实际数量应该小于实际装备的总数。
3)远程防空武器火力覆盖面积约束,部署的远程防空武器所组成的火力杀伤区域应将整个掩护区域覆盖。
4)中、近程防空武器掩护能力约束,中、近程防空武器组对掩护目标的掩护能力扇区应能覆盖掩护目标被攻击扇区。
5)抗击能力约束,重要掩护目标在半径15 km范围命中率不低于90%,一般掩护目标在半径25 km范围命中率不低于80%。
2.3 NSGA-III 求解方法
为了实现本文所提出的区域掩护、目标掩护混合部署,需要对远、中、近程防空武器的部署进行目标函数相互制约的考虑。此外,远程防空武器部署后还会生成新的掩护目标约束,因此,中、近程防空武器的部署也需要依据此约束进行。为解决这个问题,本文采用了两层NSGA-III 算法。该算法是一种基于遗传算法框架的快速收敛方法,可以计算多个相互制约的目标函数的帕累托解集,能够更好地解决本文复杂的组合优化问题[6]。
根据中、近程防空武器的部署方式可以知道,在资源充足的情况下,中、近程防空武器在区域掩护与目标掩护之间是没有冲突制约关系的。但是在现实作战中,由于作战资源有限,很难同时兼顾两者。为了解决这个问题,本文提出了通过遗传交叉的方法组合两种解集,并通过生成变异子代的方式,产生可以综合区域、目标掩护的解集。部署流程如图3、图4 所示。
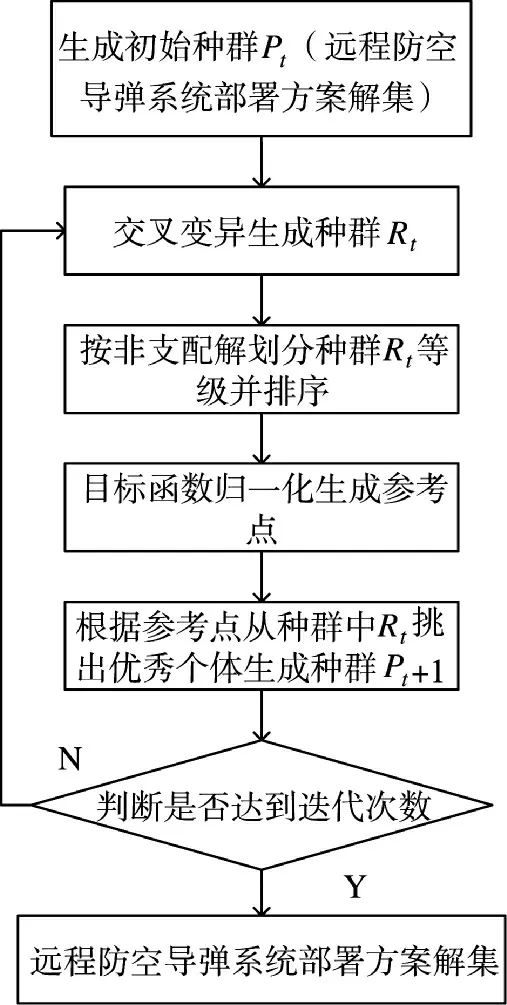
图3 远程防空武器部署流程Fig.3 Deployment process of long range air defense weapons
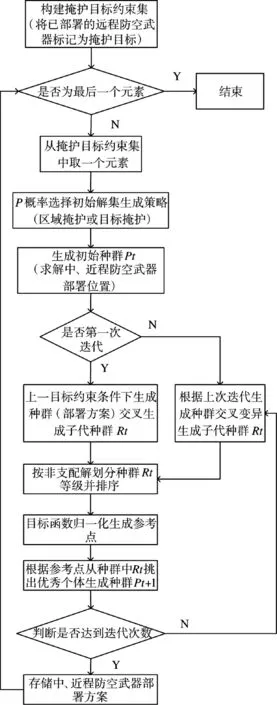
图4 中、近程防空武器部署流程Fig.4 Deployment process of medium and short range air defense weapons
2.4 NSGA-III 算法的改进
在进行中、近程防空武器部署时,需要综合考虑区域掩护和目标掩护。一般先分别求解出区域掩护、目标掩护下中近程防空武器的部署方案解集,通过交叉遗传的方法将两种部署方案结合在一起,如下页图5 所示。但是对于同一个场景约束,这样进行了3 次算法迭代,成本较高。为了减少计算成本,可以通过改变NSGA-III 算法每次迭代对初始解集的选择,在一次算法迭代过程中得到综合部署方案。具体方法是在对中、近程防空武器部署时,依据一定的概率选择中、近程防空武器的部署方法(区域掩护部署、目标掩护部署),并在进行NSGA-III 算法求解时,在第一次迭代前不使用自身的异变解集进行交叉,而是使用上一轮部署方法求解的部署方案。这样不仅可以缓解区域掩护和目标掩护之间的求解冲突,还可以减少先两次求解再交叉变异的计算量,从而加快了收敛速度。
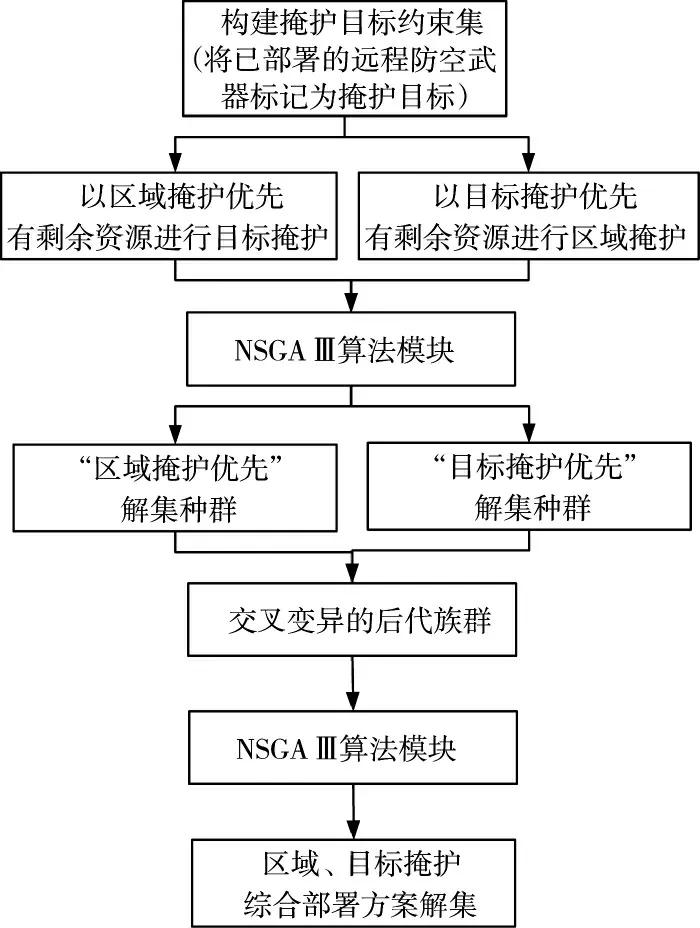
图5 未改进的中、近程防空武器部署流程Fig.5 Deployment process of unimproved medium and short range air defense weapons
在NSGA-III 算法中,种群规模设置为50,迭代次数设置为2 000,分别对优化前后算法求解过程进行测试。求解时间如下页表1 所示,解集IGD 指数(是每个在真实Pareto 前沿面上的点到算法获取的个体集合之间的最小距离之和,用以评价算法的收敛性能和分布性能。值越小,算法的综合性能包括收敛性和分布性能越好[11])如图6、图7 所示。由数据可看到,优化后求解时间大幅降低,并且其IGD 数值并未退化,说明求解过程的收敛性与多样性没有降低。

表1 算法改进前后求解时间对比Table 1 Comparison of solving time before and after algorithm improvement
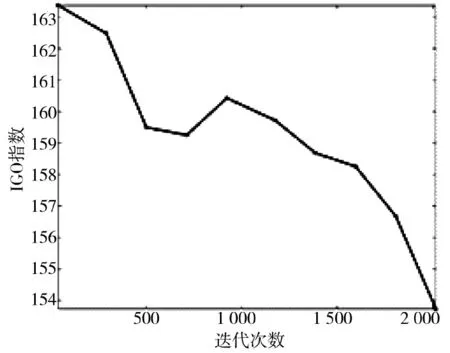
图6 改进前IGD 指标Fig.6 IGD index before being improved
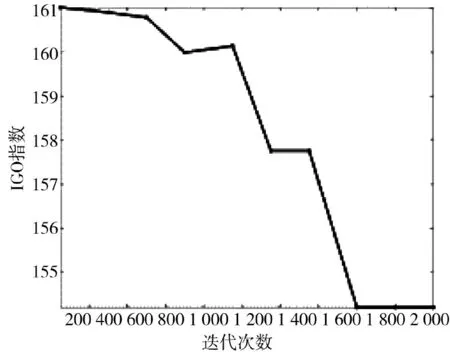
图7 改进后IGD 指标Fig.7 IGD index after being improved
3 实例分析
本文假设掩护区域为250 km*150 km 的矩形,布置3 个掩护目标A、B、C,其中,A、B 目标为重要掩护目标,C 目标为一般掩护目标,设置x 轴方向为正东,y 轴方向为正北,坐标轴单位为km。掩护区域北部和东北的湖泊及山脉为不可部署区域。敌空袭武器的3 个主攻方向,分别是区域北边界西部、东部方向,以及区域东边界北部方向,最大航路角为60°。其中,区域北边界西部来袭武器为轰炸机与无人机,空袭武器覆盖边界区域x 轴-59 km~-4 km;区域北边界东部来袭武器为轰炸机与巡航导弹,空袭武器覆盖边界区域x 轴11 km~73 km;而区域东边界北部所有空袭武器混合进攻空袭武器覆盖边界区域y 轴66 km~-14 km。其余方向为次要攻击方向,攻击方式为战斗轰炸机进攻。敌我双方武器性能如表2、表3 所示。
表2 敌空袭武器数据Table 2 Data of enemy air raid weapons
表3 我方防空武器数据Table 3 Data of anti-aircraft weapons of our side
在NSGA-III 算法中,种群规模设置为50,迭代次数设置为2 000,实验仿真进行300 次,抽取样本数量为50,计算每个样本每一目标函数解平均值并求取全体样本标准差,各标准差值中最大不超过平均值5%,取其一仿真运行数据,部分非支配如表4所示。
表4 防空武器部署目标函数部分非支配解Table 4 Partial non-dominated sets of objective function of air defense weapon deployment
通过软件将得到的帕累托最优解在地图上部署并进行攻防推演仿真,由图8(b)、图8(c)可直观得知火力重叠越密集的区域,区域内抗击能力越高。而由表4 可知火力覆盖面积越大,耗弹量越多。
图8 防空编队部署示意图Fig.8 Schematic diagram of air defense formation deployment
由图8 可知,在生成的方案中,掩护区域整体被防空武器火力覆盖没有遗漏,并且在不同方向上根据来袭武器特点进行有区别的部署,在无人机进攻的方向上由于导弹无法对其锁定毁伤,所以在该方向上部署高炮进行打击,并且在该方向上的区域前沿位置抗击命中率均达到了90%以上,效果良好。
对于重要掩护目标A、B,其余所在位置均面临敌3 种空袭兵器,所以A、B 目标都被4 种防空武器火力覆盖,并且A 目标面临两个来袭方向的进攻,因此,在高来袭强度下,周围部署的火力也较强。而掩护目标C,重要程度低,并且面临敌来袭强度低,所以只在附近部署火力密度较低,但仍部署了高炮对来袭的无人机进行打击。A、B 目标所处区域范围内命中率均达到97%以上;C 目标所在区域范围内命中率达到87%以上,均符合约束。
与此同时,在掩护区域东北部的两个敌空袭方向上部署的两架远程防空武器,其作整个掩护区域的“保护伞”,也应该受到其他防空武器火力的掩护,特别是对无人机打击的防御,而在生成的方案中,这两架远程防空武器周围都部署了高炮对无人机进行防御,并且所在区域火力掩护密集,区域内命中率达到97%以上,效果良好。
综合分析,通过本文方法得到的防空编队方案可以取得良好的防御效果,能够为地面防空火力的部署提供的参考。
4 结论
本文研究了防空火力部署规则,通过构建部署模型并使用改进的NSGA-III 算法平衡多个目标函数,包括耗弹量、火力重叠面积、火力覆盖面积、目标有效掩护次数、边界有效掩护宽度、综合抗击能力等。这为区域掩护和目标掩护防空火力编队部署提供了有价值的参考。不仅防空火力编队部署,火力分配也是决定防空编队抗击能力的关键因素。因此,在防空编队部署研究的基础上,未来需要进一步探究部署与火力分配之间的关系,并将火力分配机制纳入到部署考虑体系中,以进一步改善防空火力部署。
