某纯电动全地形车动力系统的参数优化设计与仿真
2023-05-31李崧
李崧
江苏林海动力机械集团有限公司,江苏泰州 225300
0 引言
全地形车是一种主要用于休闲娱乐和日常实用的动力运动装备,其主要销售市场在北美和欧洲。随着欧美国家对环保要求的不断提高,在全球推崇碳中和和电动化的大趋势下,纯电动全地形车有望成为未来发展的新趋势。
纯电动全地形车的动力性和经济性反映了动力系统的设计水平,是消费者、竞争对手和企业自身都关注的需求,也是体现竞争力的需求,而满足这些需求的关键在于纯电动全地形车动力系统参数的合理设计。
本文根据性能指标并通过理论计算确定了某纯电动全地形车电机参数和传动系统传动比的范围[1]。由于同样功率的电机具有不同的驱动特性,通过仿真分析优化传动系统的传动比,满足了该纯电动全地形车的动力性和经济性要求。
1 基本参数及性能目标
某纯电动全地形车的整车基本参数见表1,整车性能目标见表2。
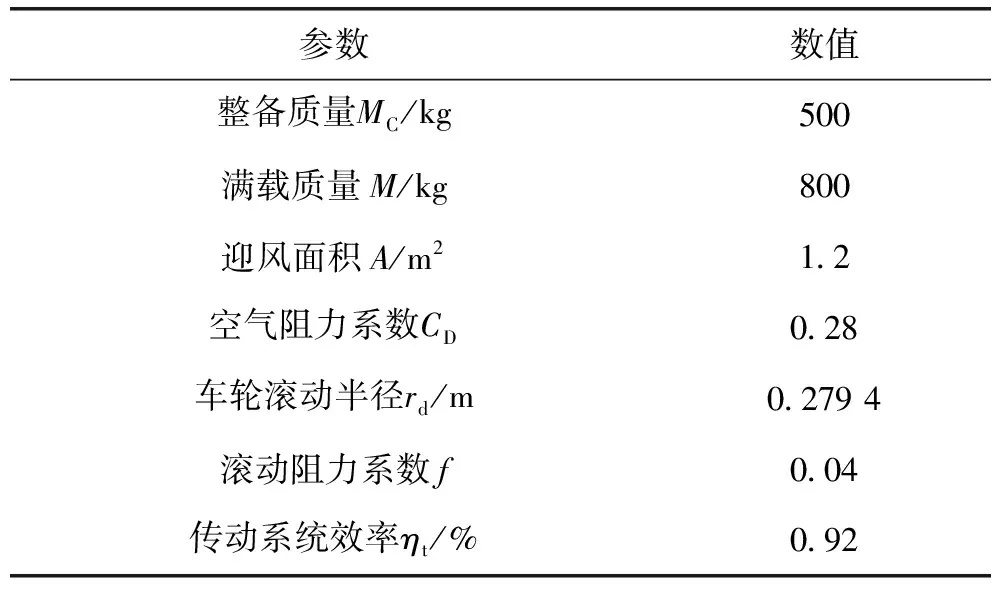
表1 整车基本参数
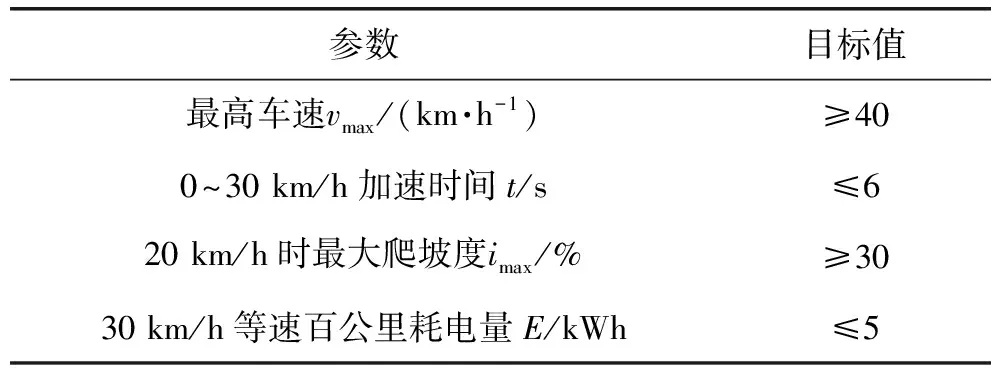
表2 整车性能目标
2 动力系统参数设计
2.1 电机参数设计
电机参数的设计需满足最高车速、加速性能和爬坡性能指标的要求[2]。
纯电动全地形车最高车速要求所消耗的电功率为
(1)
式中:Pv为最高车速行驶时消耗的功率,kW;ηt为传动系统效率;M为满载质量,kg;g为重力加速度,m/s2;f为滚动阻力系数;vmax为最高车速,km/h;CD为空气阻力系数;A为迎风面积,m2。
纯电动全地形车在水平路面上加速行驶所消耗的功率为
(2)
式中:Pj为加速至速度v时消耗的功率,kW;v为车辆行驶速度,km/h;δ为车辆旋转质量换算系数;dv/dt为行驶加速度。
纯电动全地形车以某一速度v爬上一定坡度所消耗的功率为
(3)
式中:Pi为以速度v爬坡时消耗的功率,kW;α为爬坡角度。
根据公式(1)~(3)可计算出纯电动全地形车满足最高车速、加速时间、最大爬坡时所需的电机功率需求,具体见表3。
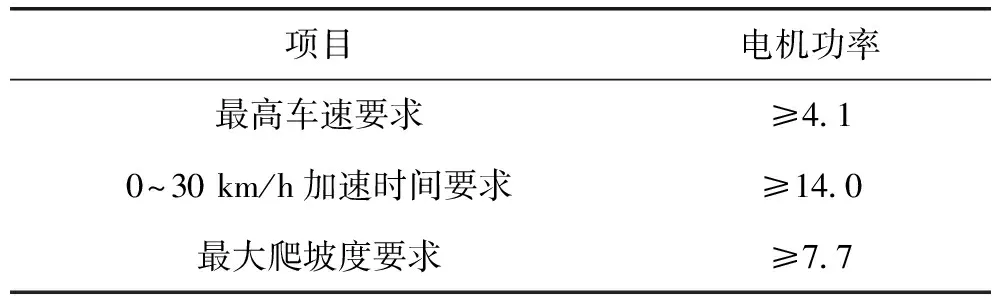
表3 电机功率需求 单位:kW
驱动电机的额定功率应该满足纯电动全地形车在最高车速时消耗的功率需求,而最大功率则应该能够满足加速和最大爬坡阶段消耗的功率要求。
由表3可知,电机额定功率Pe应大于4.1 kW,电机的最大功率Pmax应大于14 kW。按此要求所选电机参数见表4。
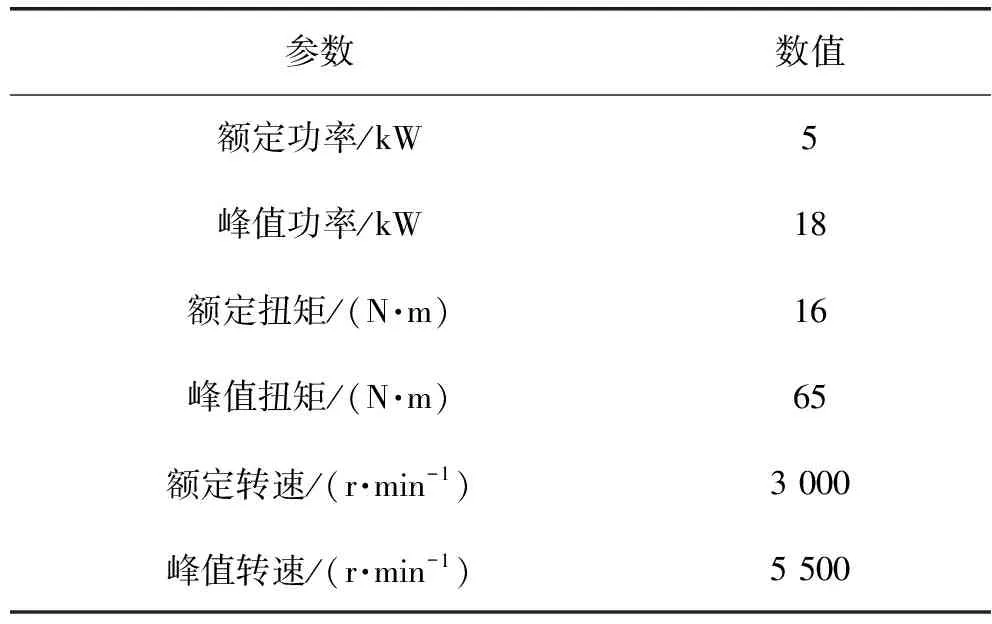
表4 电机基本参数
2.2 传动系统设计
某纯电动全地形车采用一挡传动形式,传动系统的传动比应同时满足最高车速和最大爬坡度的要求。
由电机峰值转速和电动全地形车最高车速确定的传动系统速比上限为
(4)
式中:i为传动比;nmax为电机峰值转速,r/min;rd为车轮滚动半径,m;vmax为最高车速,km/h。
传动系统速比下限由下述两种方法计算出的最大值确定。
方法一,由电机最高转速对应的输出扭矩和电动全地形车最高车速对应的行驶阻力确定的传动比下限为
(5)
式中:Tnmax为电机最高转速时输出的扭矩,N·m。
方法二,由电机最大扭矩和电动全地形车最大爬坡度对应的行驶阻力确定的传动比下限为
(6)
式中:Tmax为电机的最大扭矩,N·m。
根据公式(4)~(6)可计算出传动系统的传动比为11.93≤i≤14.48。
3 传动比优化
在AVL-CRUISE软件中搭建纯电动全地形车仿真模型[3],如图1所示。
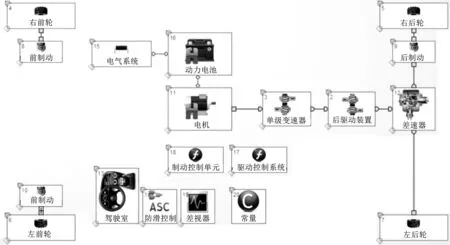
图1 某纯电动全地形车仿真模型
通过使用CRUISE软件中的Matrix calculation计算模式可以快速进行矩阵运算,对传动比范围内的取值进行组合运算[4]。本文选择在传动比范围内以等步长取10进行计算[2],不同传动比性能仿真结果对比见表5。
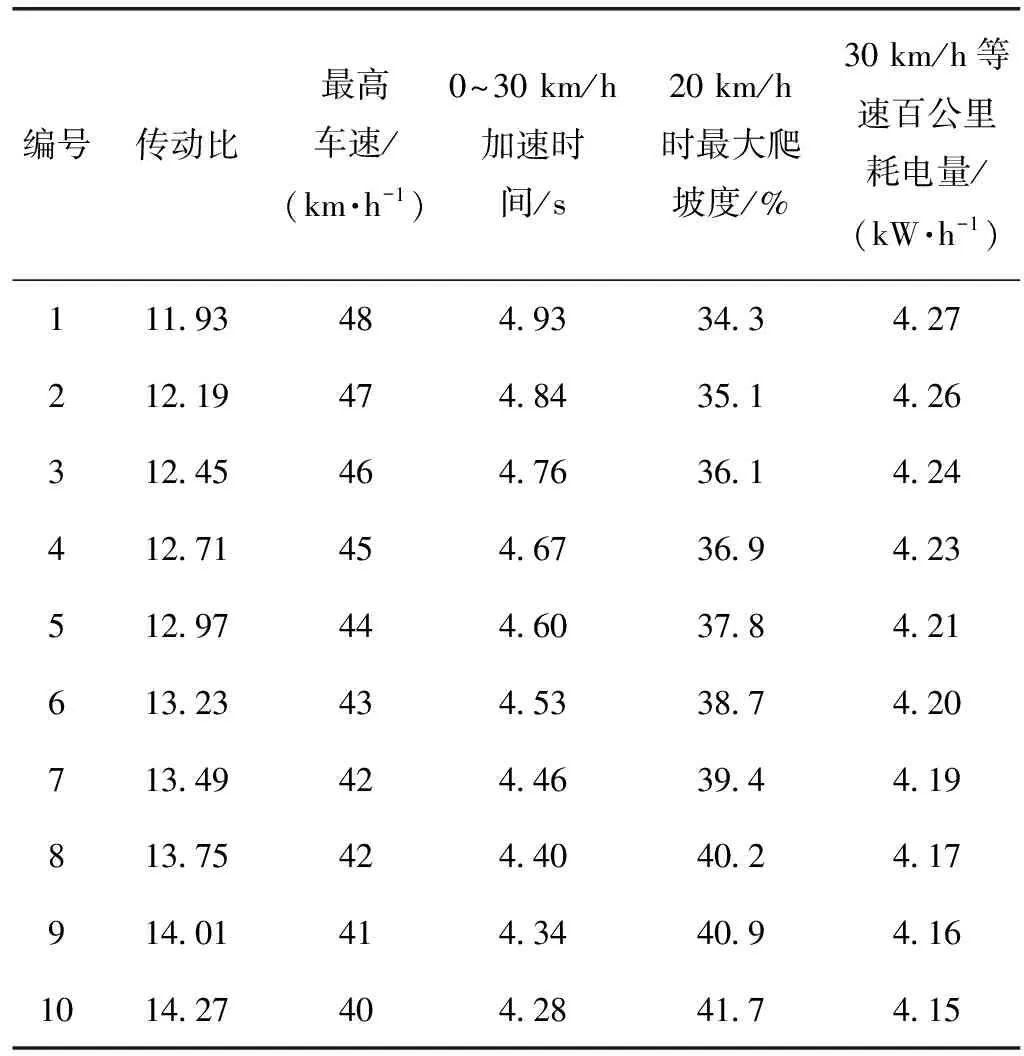
表5 不同传动比性能仿真结果对比
传动比变化对整车性能曲线的影响如图2所示。
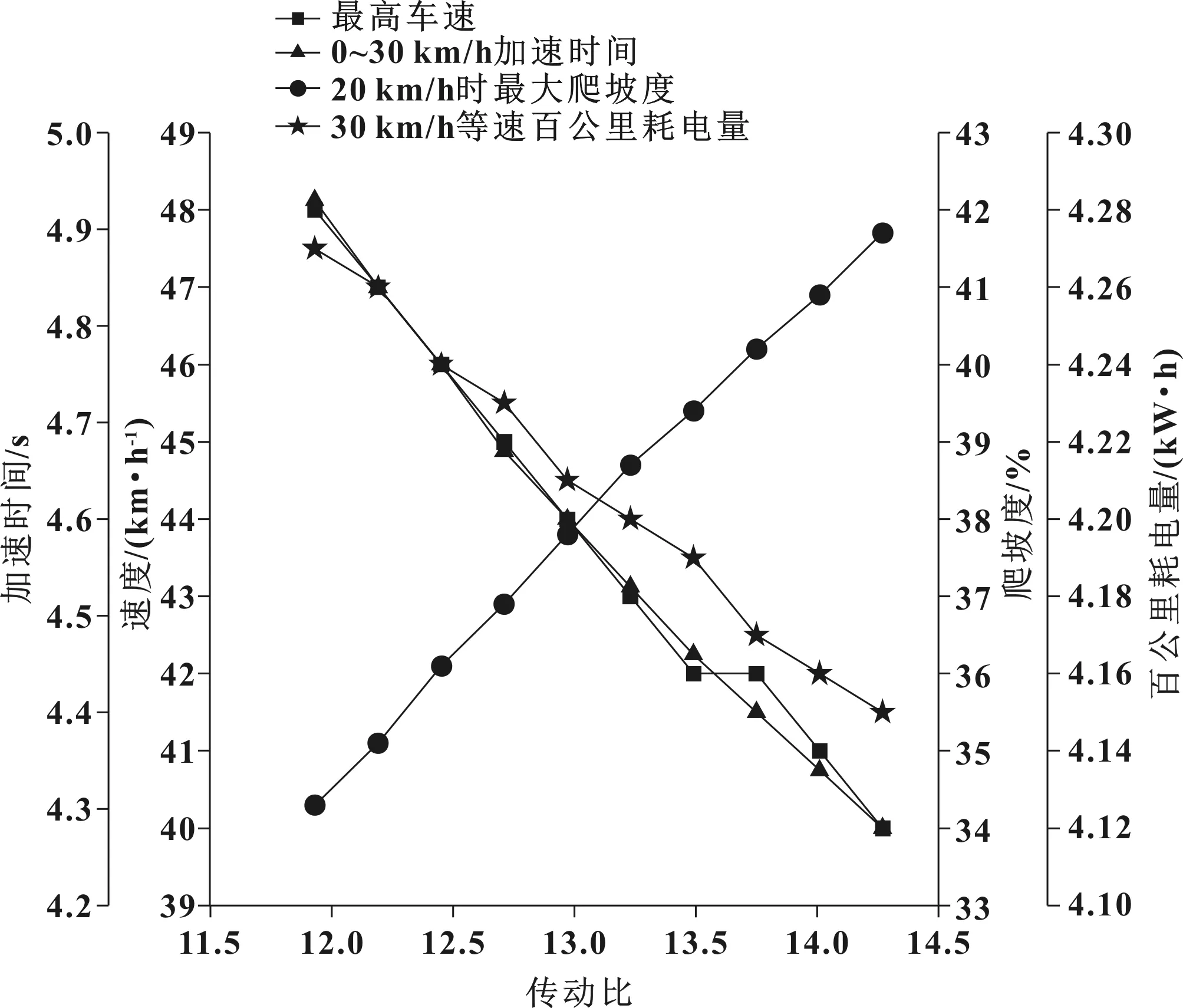
图2 传动比变化对整车性能曲线的影响
由图2可以看到,随着传动比的增大,最高车速、0~30 km/h的加速时间、30 km/h等速百公里耗电量会减小,而20 km/h的最大爬坡度会增加。这些变化呈线性趋势,但是无法在特定的传动比下同时获得最佳性能。因此,必须对多个性能指标进行平衡,以确定最佳的传动比。
在进行传动比的综合性能评估时,必须确保符合整车性能目标设计的要求。本文采用了一种基于权重系数的车辆综合性能评价体系[5],该评价体系的总体评价公式为:
(7)
a+b+c+d=100%
(8)
式中:Ki为某传动比综合评价指数;a,b,c,d分别为最高车速、最大爬坡度、加速时间、百公里耗电量的权重系数;vi为某传动比最高车速,km/h;vmax_all为所有传动比中的最高车速,km/h;tmin_all为所有传动比中0~30 km/h最短加速时间,s;t为某传动比0~30 km/h加速时间,s;ii为20 km/h时某传动比最大爬坡度,%;imax_all为20 km/h时所有传动比中的最大爬坡度,%;Emin_all为所有传动比中30 km/h等速百公里最小耗电量,kWh;E为某传动比30 km/h等速百公里耗电量,kWh。
根据客户对性能需求的关注程度,可设定最高车速权重系数为40%,爬坡度权重系数为30%、百公里耗电量权重系数为20%,加速时间权重系数为10%,将表5中数据代入公式(7)可计算出各传动比的综合评价指数,具体见表6。
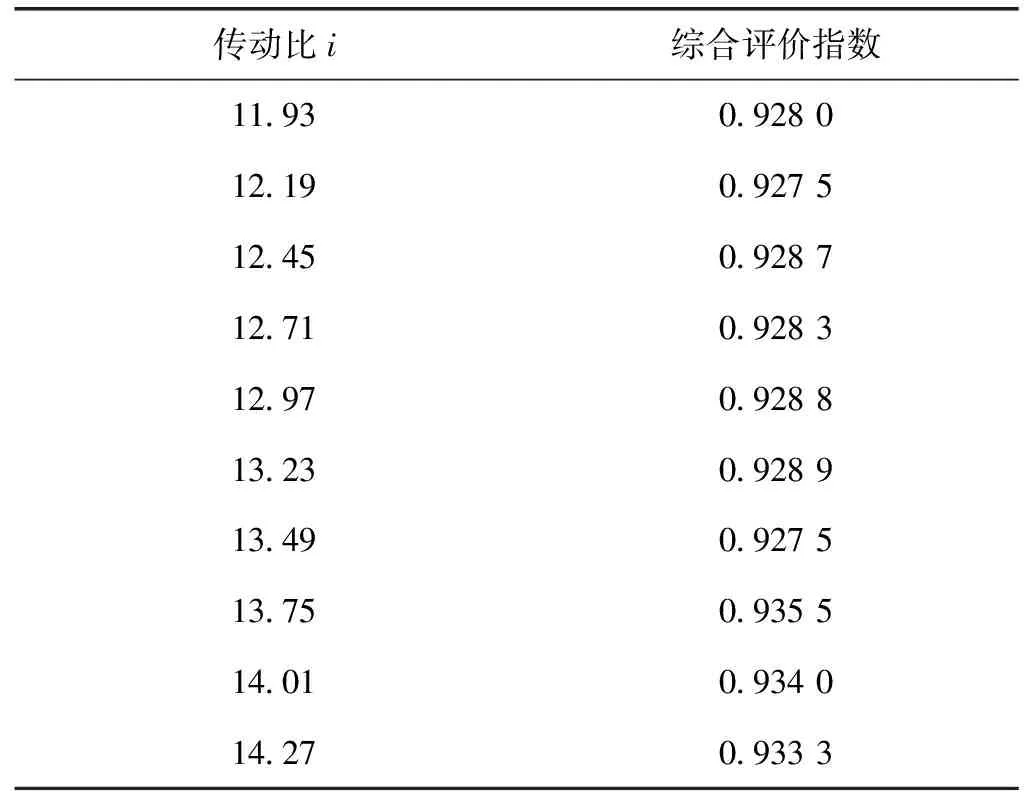
表6 各传动比综合评价指数
由表6可以看出,传动比i为13.75时,综合评价指数最高,因此优化后选取传动比i=13.75。
4 性能仿真分析
当传动比i为13.75时,在软件中进行仿真计算,可得到某纯电动全地形车30 km/h等速百公里耗电量为4.17 kWh,驱动力与行驶阻力随速度变化曲线如图3所示,加速性能曲线如图4所示,爬坡性能仿真曲线如图5所示。

图3 驱动力与行驶阻力随速度变化曲线
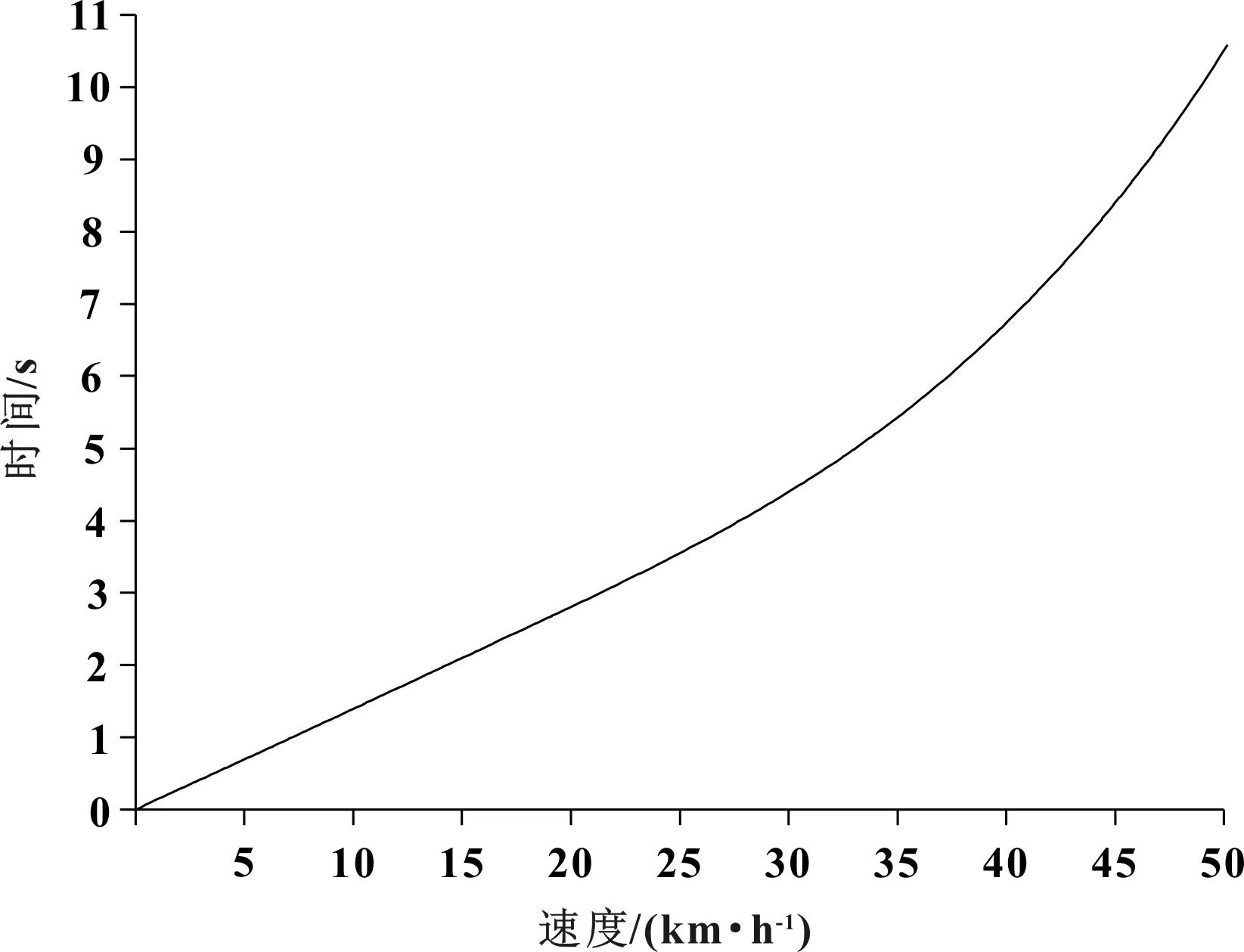
图4 加速性能仿真曲线
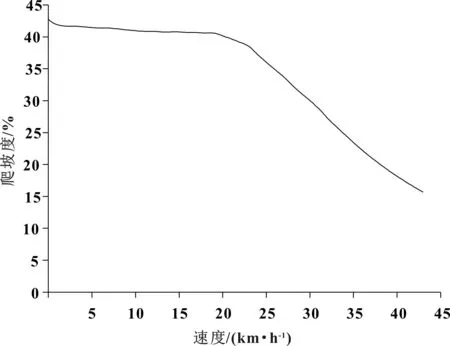
图5 爬坡性能仿真曲线
由图3可以看出,某纯电动全地形车最高车速为42 km/h;由图4可以看出,0~30 km/h的加速时间为4.4 s;由图5可以看出,20 km/h速度时的爬坡性能为40.2%。
性能仿真分析结果见表7。由表可知,某纯电动全地形车仿真结果满足性能目标的要求。
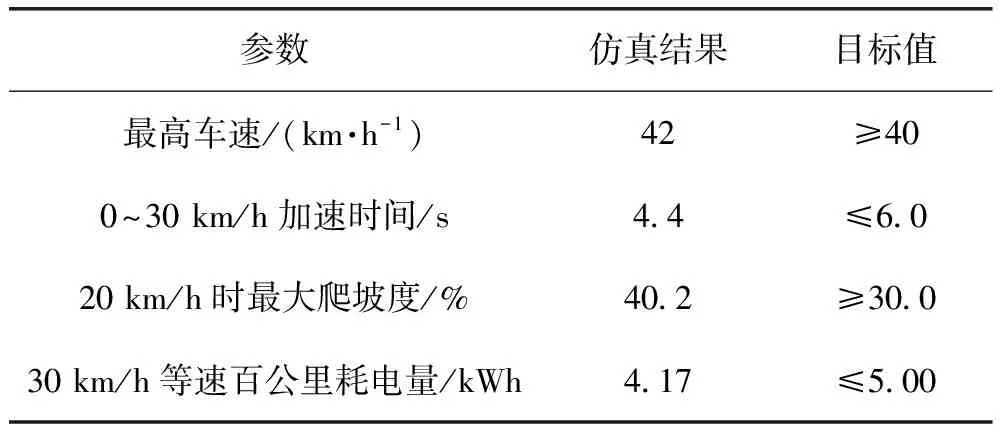
表7 性能仿真分析结果
5 结束语
以某纯电动全地形车为例,经过对动力传动系统中电机和传动系统参数的设计计算,以及通过仿真软件的验证,证明了该设计参数符合整车性能要求,达到预期效果,对于后续纯电动全地形车的初期设计具有参考价值。