水稻插秧机移栽机构研究现状
2023-05-10徐廷波李梦寒
徐廷波,李梦寒
(江苏大学农业工程学院,江苏 镇江 212013)
0 引言
水稻作为我国4 大主要粮食作物之一,产量居世界首位。水稻的种植在现代化农业生产中占据了十分重要的地位。而水稻生产机械化是向现代化农业转变的关键一步,从水稻插秧机的功能和结构入手,优化水稻送秧、插秧的实际效果有利于整机技术和可靠性的提升。移栽机构是水稻插秧机从秧群中分取一定数量的秧苗并插入土中的机构,它是插秧机的主要工作部件,其性能决定插秧质量、工作可靠性和单位时间的插次。
1 曲柄连杆移栽机构
1.1 传统曲柄摇杆移栽机构
传统曲柄摇杆移栽机构在20 世纪80 年代已经研制成型并投入使用,其结构如图1 所示,由于其结构简单和良好的插秧质量而被广泛使用。在该机构中,曲柄为主动件,逆时针带着凸轮转动,随着凸轮半径的增大,并且在推秧拨叉的作用下,推秧弹簧被压缩也越大;随后凸轮与推秧拨叉分离,推秧弹簧失去外力,在推秧弹簧的作用下,推秧杆被迅速推到最底部,即完成了栽插[1]。

图1 曲柄摇杆移栽机构结构Fig.1 Structure of crank rocker transplanting mechanism
研究人员对曲柄摇杆机构的振动和噪声问题进行了研究。赵匀等[2]对推秧拨叉和凸轮进行了设计和再优化,大大降低了振动和凸轮的磨损。白海英等[1]也对此展开了研究,同样降低了凸轮的磨损和振动。任永飞等[3]利用质量代换法分析杆件配重平衡,也很好地降低了连杆类移栽机构运动不平稳问题。
东北农业大学[4]和赵匀等[5]将连杆机构和齿轮机构结合设计出双曲柄五杆式水稻钵苗移栽机构和拟合齿轮五杆水稻钵苗移栽机构,如图2 和图3 所示。二者均是适用于水稻钵苗的移栽,但是拟合齿轮五杆水稻钵苗移栽机构是在双曲柄五杆式水稻移栽机构改进而来,能够更加适用于水稻钵苗的移栽,其移栽效率和质量相较于曲柄摇杆机构大幅度提升。

图2 双曲柄五杆式水稻钵苗移栽机构Fig.2 Double-crank five-bar rice bowl seedling transplanting mechanism
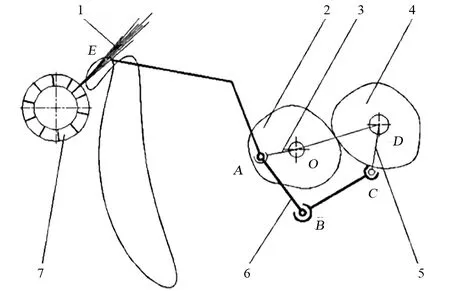
图3 拟合齿轮五杆水稻钵苗移栽机构Fig.3 Fitting gear five-bar rice bowl seedling transplanting mechanism
1.2 曲柄摇杆夹持式移栽机构
蔡金平等[6]提出的曲柄摇杆夹持式水稻移栽机构如图4 所示,该机构在取秧位置时秧夹张开,夹取秧苗根部,在放秧位置时打开秧夹,秧苗在重力作用下落入输秧筒中,经此掉落在稻田,完成移栽。

图4 曲柄摇杆夹持式移栽机构Fig.4 Crank-rocker clamping transplanting mechanism
在调速电机的作用下,下轴和偏心轴作为原动件输入动力,带动整个机构的运转;而依靠凸轮的不平整面和两侧滚珠的共同作用实现了秧夹的张合;通过偏心轮和连杆使摆杆臂做前后往复运动,从而实现取秧和放秧动作。
蔡翰等[7]研究表明,在取秧速度为50 株/min 时,漏秧率和伤秧率分别为3.57%和2.14%,试验结果略低于行业相关标准,其漏苗率和伤秧率随着取秧速度的增加而增加;同时,该移栽机构采用取秧和送秧,送秧过程则是将秧苗输送到输苗筒中,要靠秧苗自身重力掉落在田地完成移栽,该方式完成的移栽会出现秧苗直立度无法保证的问题,而直立度越大,水稻产量越高。
针对曲柄摇杆机构在高速运行时的高振动及高噪声进行改进或再设计,都很难消除这个固有属性。水稻移栽机构的研究正在向高速、高质量开展,曲柄摇杆移栽机构的使用正在逐渐减少,但是在旱地移栽中仍运用广泛[8-9]。
2 行星轮系移栽机构
随着研究的不断深入,以及对移栽机要求的提高,曲柄摇杆式移栽机构的另一个短板逐渐展现,即单位时间内的插秧频次不能太高,否则漏秧率和伤苗率会大大提高。日本率先开始了高速移栽机构的研究,也就是行星轮系移栽机构。行星轮系移栽机构有两个大类:圆齿轮行星轮系和非圆行星轮系移栽机构。
2.1 椭圆行星轮系移栽机构
在现有偏心行星齿轮移栽机构的基础之上,日本学者展开了对椭圆行星轮系移栽机构的研究,该机构的结构原理与偏心行星齿轮移栽机构基本相同,因此不再叙述。二者不同的是椭圆行星轮系移栽机构的椭圆齿轮加工精度要求更高,采用了粉末冶金工艺,成本较高,但是传动更为平稳。
刘思勍[10]在椭圆行星轮系移栽机构的基础上提出了双联椭圆齿轮移栽机构,其结构如图5 所示,其结构与传统的椭圆行星轮系移栽机构基本相同,均是由太阳齿轮、中间齿轮和行星齿轮组成,分布方式也相同。但是却创新性地提出将中间齿轮用双联齿轮替换,即由传统的太阳齿轮、中间齿轮和行星齿轮相互啮合转变为太阳齿轮与双联齿轮之一啮合和行星齿轮与双联齿轮另一部分啮合的方式。得益于其独特的结构设计,该方式能够较好地实现复杂插秧轨迹。
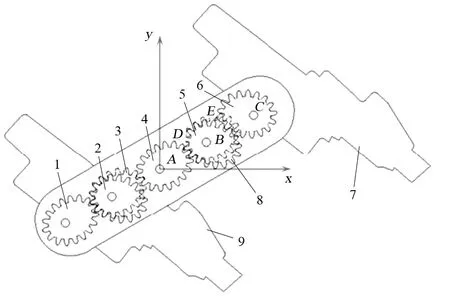
图5 双联椭圆齿轮移栽机构Fig.5 Double elliptic gear transplanting mechanism
2.2 正齿行星轮系移栽机构
正齿行星轮系移栽机构结构如图6 所示,由4 个完全相同的正圆齿轮和3 个完全相同的椭圆齿轮组成[11]。安装时行星齿轮和中间齿轮相对于太阳齿轮对称布置,并且各个齿轮的回转中心在同一条直线上,椭圆中间齿轮的回转中心都位于其焦点处。添加动力运转时,通过各个齿轮间的啮合达到相应的轨迹。
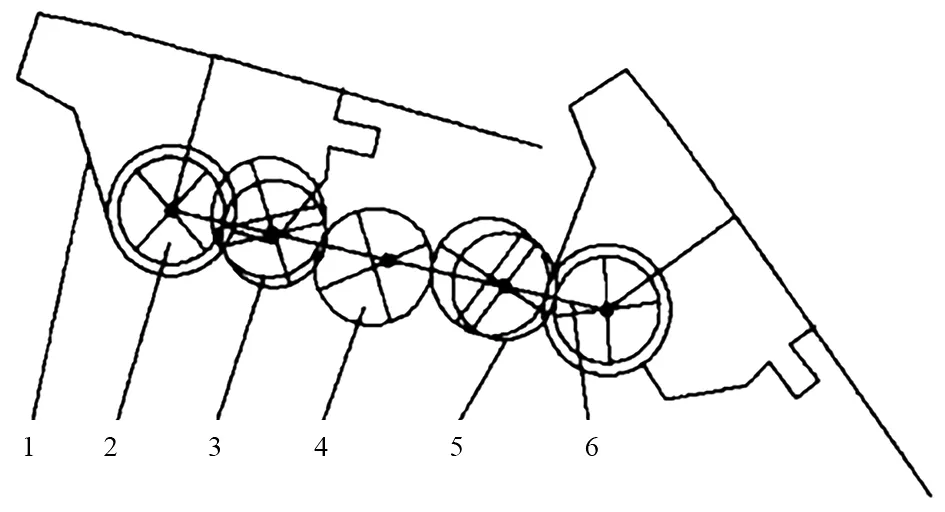
图6 正齿行星轮系移栽机构Fig.6 Transplantation mechanism of spur gear planetary gear train
在现有的正齿行星轮系的移栽性能达不到要求的情况下,需要对此进行再设计。程路超[12]设计出不完全齿轮行星轮系移栽机构,该机构由3 个完全圆柱直齿轮、4 个不完全圆柱直齿轮(2 个不完全中间轮、2个不完全行星轮)组成,分为两侧对称布置。通过不完全齿形轮廓的啮合实现变传动比运动,与一级传动、壳体、栽植臂相配合,带动栽植臂前端的秧夹实现“8”字型移栽轨迹,从而更容易满足钵苗移栽的栽植农艺要求。
2.3 椭圆差速移栽机构
椭圆差速移栽机构结构如图7 所示,3 个椭圆齿轮完全相同,回转中心都在其交点处、相位相同,并且支撑在行星架上[13]。工作时,行星架(壳体)作为原动件做绕太阳齿轮的回转运动,太阳齿轮作为另一个原动件,其转速是行星架转速的2 倍,并且二者同向转动,从而使行星齿轮与移栽臂的轨迹和运动满足特定要求。
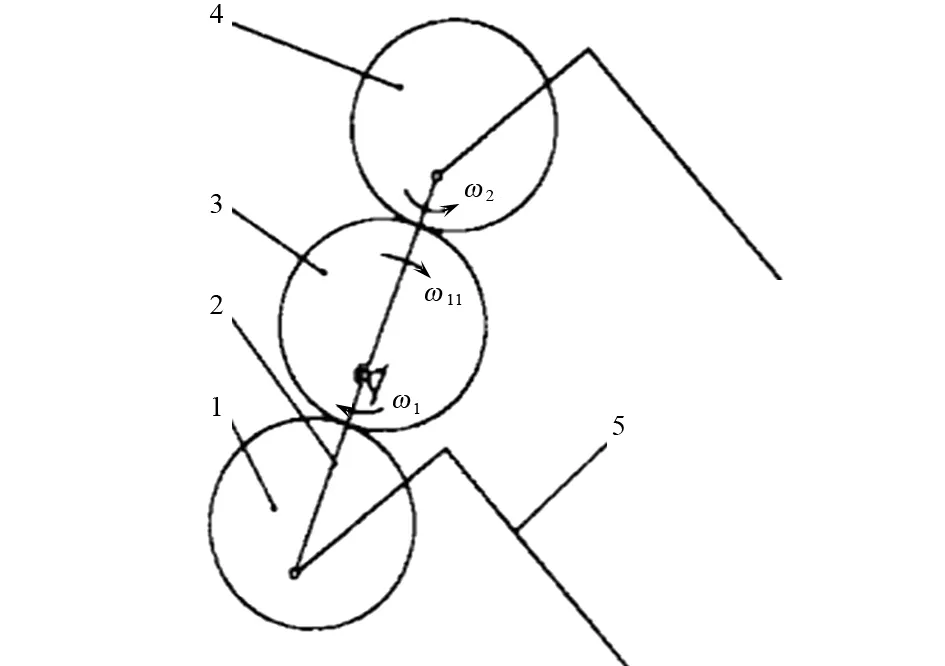
图7 椭圆差速移栽机构Fig.7 Elliptical differential transplanting mechanism
2.4 非圆齿轮行星轮系移栽机构
非圆齿轮行星轮系移栽机构相较于圆齿轮行星轮系移栽机构来说设计更为复杂,这是因为非圆齿轮的节曲线并非是圆形,求解更为复杂。周脉乐[14]提出了一种新型非圆齿轮的成型方法,即利用贝塞尔曲线拟合控制点得到非圆齿轮的节曲线,并将其命名为贝塞尔齿轮。该非圆行星轮系移栽机构结构如图8 所示,太阳齿轮位于机构正中间,太阳齿轮两侧各有一对中间齿轮和行星齿轮,移栽臂与行星齿轮固接。在工作时,太阳齿轮与机架固接,固定不动,动力由传动轴直接传递到机构外壳,由机构外壳带动中间齿轮和行星齿轮转动,随之带动移栽臂转动,从而达到预期的经典“8”字形轨迹,这种轨迹很巧妙地达到水稻移栽时的要求。

图8 非圆齿轮行星轮系移栽机构Fig.8 Planetary gear train transplanting mechanism with non-circular gears
俞高红等[15]提出一种不同于上述的非圆齿轮行星轮系移栽机构,即不完全齿轮—非圆齿轮行星轮系移栽机构;由不完全非圆齿轮 (简称太阳齿轮)、偏心圆齿轮 (简称行星齿轮)、凸锁止弧、凹锁止弧及行星架组成;除了保证移栽机构在工作时能够有不均匀传动比特点之外,还有间歇传动的特点。同样还有很多研究者对于非圆齿轮行星轮系移栽机构进行了设计研究[16-19]。
2.5 偏心齿轮行星轮系移栽机构
该移栽机构由日本学者提出,其结构如图9 所示,由5 个全等的偏心齿轮组成,其中太阳齿轮相对机架固定不动,太阳齿轮两侧对称放置中间齿轮和行星齿轮。在工作时,太阳齿轮固定不动,行星架旋转,中间齿轮绕轴旋转同时自转带动行星齿轮转动,插秧臂与行星齿轮固定,当轴旋转时即得到特定的移栽轨迹。
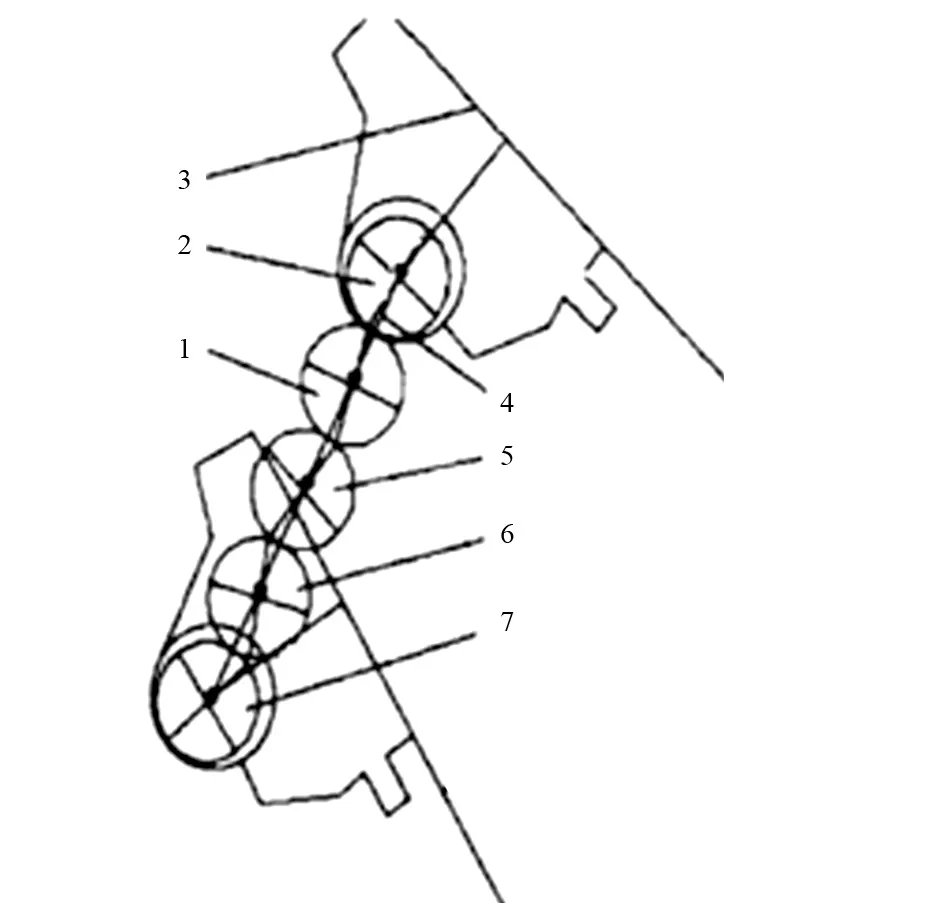
图9 偏心齿轮行星轮系移栽机构Fig.9 Eccentric gear planetary gear train transplanting mechanism
由于该机构是偏心机构,在高速运转时不可避免地会出现大幅度振动现象,因此需要增加防振装置,增加了机构的复杂程度。
2.6 双偏心卵形行星轮系移栽机构
谈梅兰等[20]对椭圆行星轮系移栽机构存在的伤秧等问题进行改进,提出双偏心卵形行星轮系移栽机构,该机构同时拥有偏心齿轮行星轮系移栽机构和椭圆齿轮行星轮系移栽机构的特点。在设计过程中,提出以标准圆柱齿轮齿廓方程为基础,运用二分法、无约束优化方法及坐标变换等辅助方式,在Matlab 中近似优化出该双偏心卵形齿轮的齿廓。
双偏心卵形行星轮系由5 个偏心齿轮组成,如图10所示,2 个行星齿轮全等且对称布置于太阳齿轮两侧,2 个中间齿轮全等且布置于太阳齿轮两侧。太阳齿轮固定不动,行星架绕回转中心转动,在太阳齿轮、中间齿轮、行星齿轮和凸轮的作用下,与凸轮联接的移栽臂能够做到特定轨迹的运动,并且运动平稳。

图10 双偏心卵形齿轮行星系装配Fig.10 Assembly drawing of double eccentric oval gear planetary system
3 偏心链轮移栽机构
偏心链轮移栽机构如图11 所示,由1 个太阳轮、1 对行星轮和1 对张紧轮5 个偏心链轮组成。运转时,行星轮绕太阳轮做圆周运动,同时自身自转带动插秧臂回转,在两种轨迹的共同作用下,得到特定的插秧轨迹。赵匀等[21]也对该机构的太阳轮和行星轮进行了参数优化,在链条张紧条件下,将取秧角、插秧角、秧针轨迹和轨迹高度作为目标函数;优化张紧轮时,将链条长度的最小变化量作为目标函数。

图11 偏心链轮移栽机构Fig.11 Eccentric sprocket transplanting mechanism
4 结束语
进入21 世纪以来,我国水稻插秧机移栽机构的研制已经由传统的低速移栽机构过渡到高速移栽机。高速移栽机构即轮系移栽机构,按照其核心部件传动齿轮的不同分为6 种不同类的轮系移栽机构,其中椭圆行星轮系移栽机构和非圆齿轮行星轮系移栽机构被广泛研究。对于轮系移栽机构主要有两种研究方向:完全非圆齿轮系移栽机构和不完全非圆齿轮系移栽机构。但是由于连杆移栽机构的结构简单、价格低廉等因素,其市场保有量仍然可观。
