一种改进型永磁同步电机模型预测电流控制方法
2023-01-06储剑波
唐 旭, 储剑波
(南京航空航天大学 自动化学院,江苏 南京 211100)
0 引 言
传统的永磁同步电机(PMSM)控制方法主要有矢量控制(VC)和直接转矩控制(DTC)[1-4]。近年来,有限状态集模型预测电流控制(MPCC)由于原理简单、容易处理系统非线性约束等优点,成为当前变频调速系统中备受关注的一种控制方法[5-14]。与磁场定向控制(FOC)相比,有限状态集MPCC无需脉宽调制,可直接产生逆变器驱动信号,更容易降低开关频率等非线性约束[5]。另外,MPCC无需坐标变换,无需电流内环及参数整定[6],具有结构简单、动态响应快等优点。同DTC相比,MPCC通过在线优化的方式来选择最佳电压矢量,在矢量选择上更加准确有效[7]。
虽然MPCC有诸多优点,但在传统MPCC方法中,作用的电压矢量方向固定、幅值固定、可选矢量数目有限等原因,会导致电流脉动大,系统性能不佳。为了改善系统性能,引入多矢量MPCC策略来优化控制性能。文献[9]提出一种三矢量MPCC策略,在每个扇区内用3个基本电压矢量合成1个期望电压矢量,由于两点平逆变器会产生6个扇区,故共合成6个期望电压矢量,并将其代入价值函数,从中选择使价值函数最小的期望电压矢量作为输出电压矢量。但6个期望电压矢量的合成会耗费控制器过多的计算时间。文献[10]采用传统三矢量MPCC,在电压矢量的选择上既考虑了幅值,又考虑了选取范围。然而,合成电压矢量时,需要依次结合所有相邻的有效电压矢量和零矢量,增加了计算量,影响系统的响应速度。文献[15]提出一种双优化三矢量MPCC策略,将第一最优电压矢量与其余5个有效电压矢量分别组合,并加入零矢量得到5组三矢量组合。该方法扩大了输出电压矢量覆盖范围,但2个最优电压矢量均为遍历寻优所得,仍有较大的计算量,在一定程度上影响控制系统性能。同时,在一个控制周期内,随着施加电压矢量数量的增加,系统的开关频率会过高。
多步预测控制在单步预测控制的基础上,通过迭代计算对系统状态进行多次预测。多步预测控制需要通过构造成本函数来考虑所有预测时刻,以获得最优电压矢量。因此,与传统MPCC相比,该方法可以改善稳态控制性能并降低开关频率。文献[16]采用多级串联控制策略,虽然在稳态性能和开关频率上有所改善,但这使得预测控制的计算量呈指数式上升。文献[17]提出了一种基于最小二乘法的多步电流预测控制,将滚动时域下的成本函数转化为最小二乘问题,虽然最小二乘法方便了预测算法的执行,但计算时仍然采用了遍历法,这使得计算量依旧很大。因此,多步MPCC方法虽然可以改善稳态控制性能并降低开关频率,但其带来了计算量的急剧增加。在实际系统中,多步MPCC方法对数字处理器有很高的要求,目前很难应用于实际电机驱动。
鉴于此,为了平衡传统MPCC的稳态控制性能与开关频率之间的矛盾,本文在传统MPCC的基础上提出了一种改进措施。该方法采用不同时刻的电流预测值构建新的成本函数,将MPCC中电压矢量选择的最优性扩展到两个控制周期,使相邻周期最优电压矢量尽量相同,来降低逆变器的开关频率。采用了基于扇区的电压矢量选择方法,可以有效地减少控制算法的计算负担。仿真结果表明,相比于传统MPCC,在相同的控制频率下,所提方法可以有效降低开关频率。此外,在开关频率近似相等的情况下,所提方法可以有效改善电流控制性能。
1 PMSM数学模型
在同步旋转坐标系下,表贴式PMSM定子电流的d轴分量id和q轴分量iq的状态方程分别为
(1)
式中:ud、uq分别为d、q轴电压;id、iq分别为d、q轴电流;ψf为永磁体磁链;Ls为定子电感;we为当前时刻转子的电角速度;R为定子电阻。
采用欧拉法可近似得到离散的d、q轴电流预测公式为
(2)
式中:k为当前采样时刻;k+1为下一采样时刻;Ts为采样周期;id(k)、iq(k)分别为k时刻的d、q轴电流;id(k+1)、iq(k+1)分别为k+1时刻的d、q轴预测电流;Ed(k)、Eq(k)分别为k时刻的d、q轴反动电势,Ed(k)=we(k)Lsiq(k)、Eq(k)=-we(k)Lsid(k)-we(k)ψf;ud(k)、uq(k)分别为k时刻的d、q轴电压;we(k)为k时刻转子的电角速度。
2 传统MPCC
传统MPCC结构如图1所示,主要包括4部分:坐标变换、预测模型、延时补偿和最小化目标函数。用模型预测控制器替代矢量控制的2个电流内环,只保留1个速度环PI控制器,无需复杂的PI参数整定。
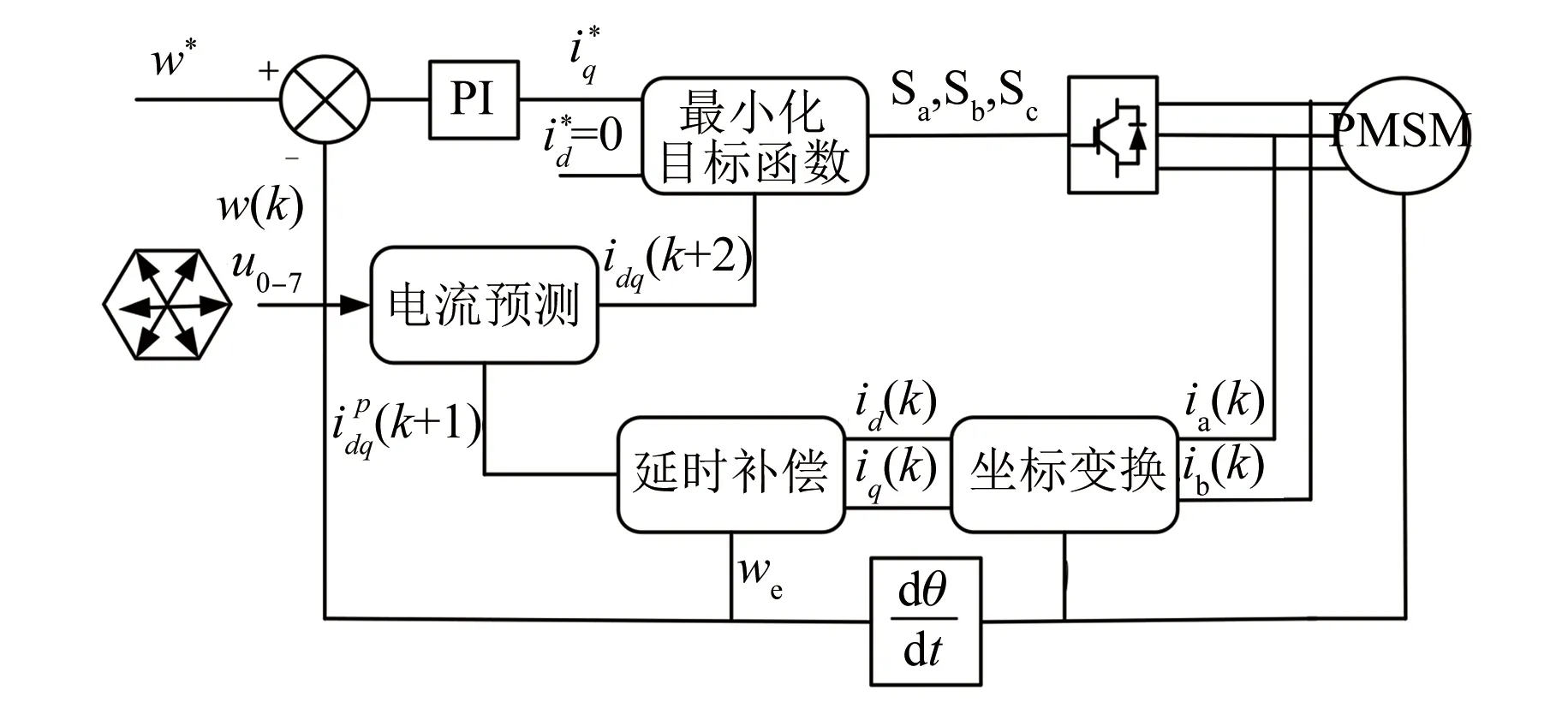
图1 传统MPCC结构图
传统MPCC控制策略通过式(2)计算7个基本电压矢量对应的d、q轴电流的预测值,再代入如下式所示的成本函数,选择使价值函数最小的电压矢量作为最优电压矢量,输出给逆变器:

(3)

然而,数字处理器的固有延迟导致当前控制周期选择的电压矢量到下一个周期才能够被施加。因此,需要通过延迟补偿来减小延时对控制性能的影响。具体过程简述如下,(1)采用式(2)对k+1时刻的电流id(k+1)、iq(k+1)进行预测,由于数字控制系统存在一拍延迟,式(2)中的电压矢量ud(k)、uq(k)为上一周期所确定的最优电压矢量,属于已知量;(2)以id(k+1)、iq(k+1)为初始条件可以得到一拍延迟补偿后的电流预测公式,如下所示:
(4)

因此,可以将延迟补偿后的8个电压矢量的预测电流值代入如下所示的代价函数来评估每个电压矢量:

(5)
式中:id(k+2)、iq(k+2)为经过一拍延时补偿后的d、q轴的预测电流。
然后,选择成本函数最小的电压矢量作为最优电压矢量,并由逆变器在下一个控制周期应用于PMSM。
从上述分析可以看出,传统MPCC在每个周期内选择1个最优电压矢量,且选择电压矢量的最优性仅限于一个控制周期。如果在相邻控制周期选择的最佳电压矢量相同,逆变器的开关状态则不会改变。这说明如果将MPCC中所选电压矢量的最优性扩展到多个控制周期,就可以有效降低逆变器的开关频率,进一步提高MPCC的控制性能。
3 改进型MPCC
本文将最优电压矢量的选择扩展到两个控制周期,把电压矢量的当前预测轨迹外推到两个控制周期,并用成本函数评估两个控制周期内每个电压矢量的控制性能。因此,改进型MPCC方法将两个控制周期的控制性能视为一个整体,并选择相同的电压矢量作为两个控制周期的最优电压矢量。并且由于电压矢量的一致性,开关频率也会下降,其结构框图如图2所示。
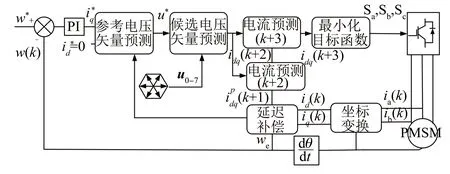
图2 改进型MPCC结构框图
为了减少第二个控制周期需要判断的电压矢量的个数,在第一个控制周期内通过将扇区重新划分以及构建新的成本函数的方法确定期望电压矢量所在扇区,将第一个控制周期内预测误差较大的电压矢量去除。
3.1 候选电压矢量选择
成本函数式(5)可以改写为
g={[hd(k+1)hq(k+1)]-
M-1(k)[ud(k+1)uq(k+1)]}·

(6)
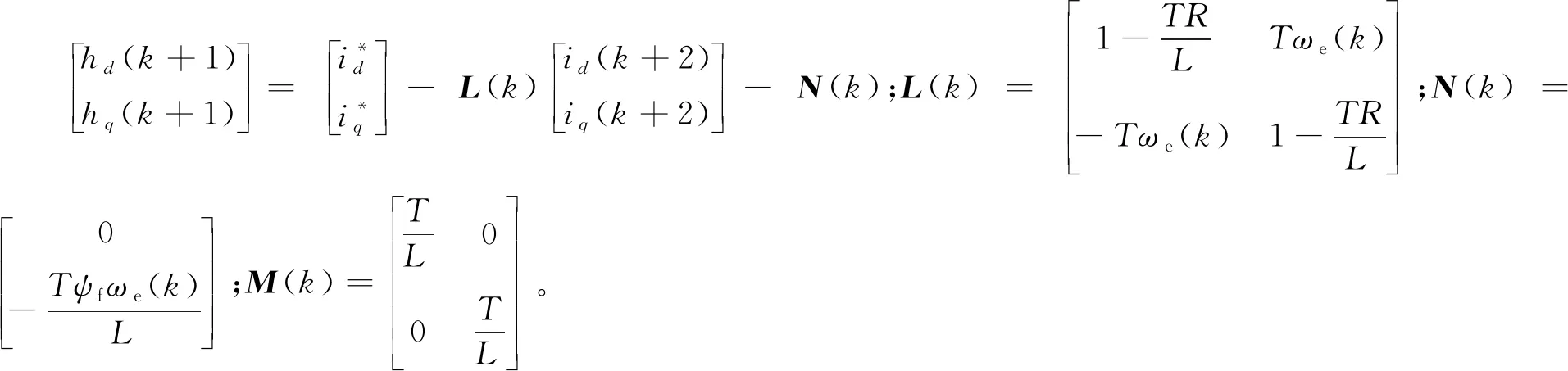
将式(6)中的g对ud(k+1)、uq(k+1)做偏导可得:
(7)

(8)
为了获得该预测参考电压矢量的相位角,将理想电压矢量变换到α-β坐标系,表达式如下所示:

(9)
将空间电压矢量重新划分为6个扇区,如图3中虚线所示,其中I~IV表示第1到第6扇区,每个扇区的角度为π/3。通过判断理想电压矢量us所在扇区,选取候选电压矢量。以us落在I扇区为例,在非零电压矢量中,显然只有u1与us之间的误差幅值最小,候选电压矢量只能是u1、u0(或u7)。这表明,每个控制周期中,仅选择扇区包括的2个电压矢量作为候选矢量,可以有效减少计算量。
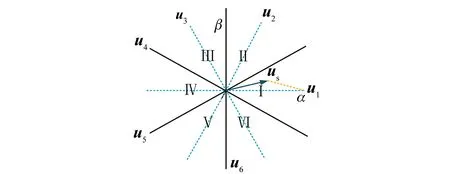
图3 两电平逆变器的电压矢量
3.2 最优电压矢量选择
在采用基于扇区的候选电压矢量选择方法之后,电压预测轨迹外推过程中预测误差较大的电压矢量已经被排除。因此,在对两个控制周期内的电压矢量进行择优时,只需要在上文所选择的候选电压矢量中选择,如图4所示。
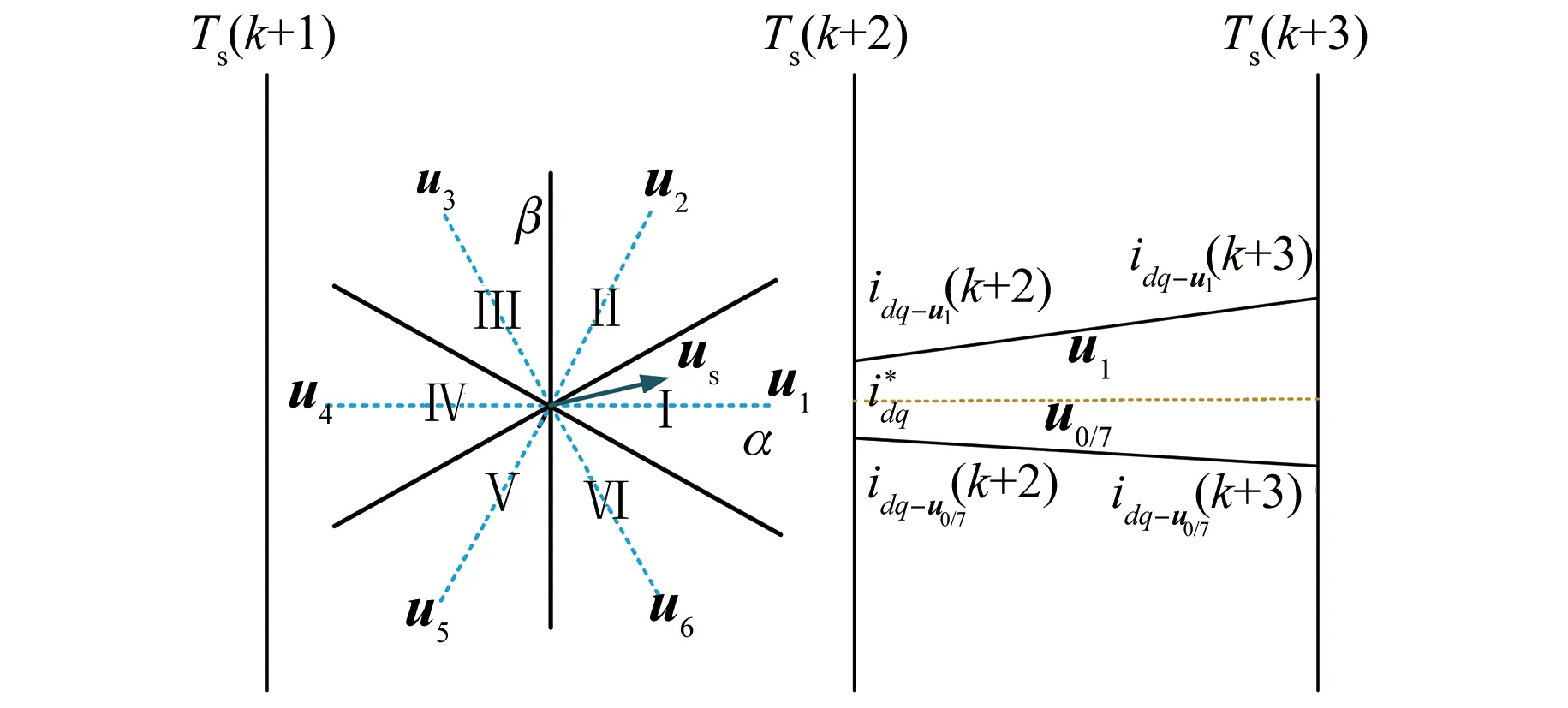
图4 改进型MPCC矢量选择示意图
图4中,idq-u1(k+2)、idq-u0/7(k+2)为候选电压矢量作用后的k+2时刻的预测电流,idq-u1(k+3)、idq-u0/7(k+3)为将电压矢量的预测轨迹外推到Ts(k+3)时刻的预测电流。
首先,根据k+2时刻的预测电流和一拍延迟补偿预测式(4),通过下式计算出k+3时刻的预测电流:

将候选电压矢量代入式(10),计算出预测电流并代入如下所示的成本函数:

(11)
选择成本函数最小时相对应的电压矢量作为最优电压矢量,并在下一个控制周期应用。详细的实现步骤总结如下:
(1) 在Ts(k)时刻采样定子电流idq(k)并已知定子电压udq(k)在k-1时刻的计算结果,由预测式(2)计算出k+1时刻的电流预测值idq(k+1)。

(3) 将第2步所得候选电压矢量代入式(4)求出k+2时刻的预测电流值idq(k+2)。
(4) 将第3步求得的k+2时刻的电流预测值和第2步求得的候选电压矢量代入式(10),可以求得k+3时刻的电流预测值idq(k+3)。
(5) 将第4步已知的k+3时刻的电流预测值idq(k+3)代入成本函数式(11),从候选电压矢量中选择出最优电压矢量作用于电机。
4 仿真分析
为验证本文所提的PMSM改进型MPCC方法的有效性,在MATLAB中搭建了PMSM仿真模型。其中,控制频率设置为20 kHz。PMSM参数如表1所示。
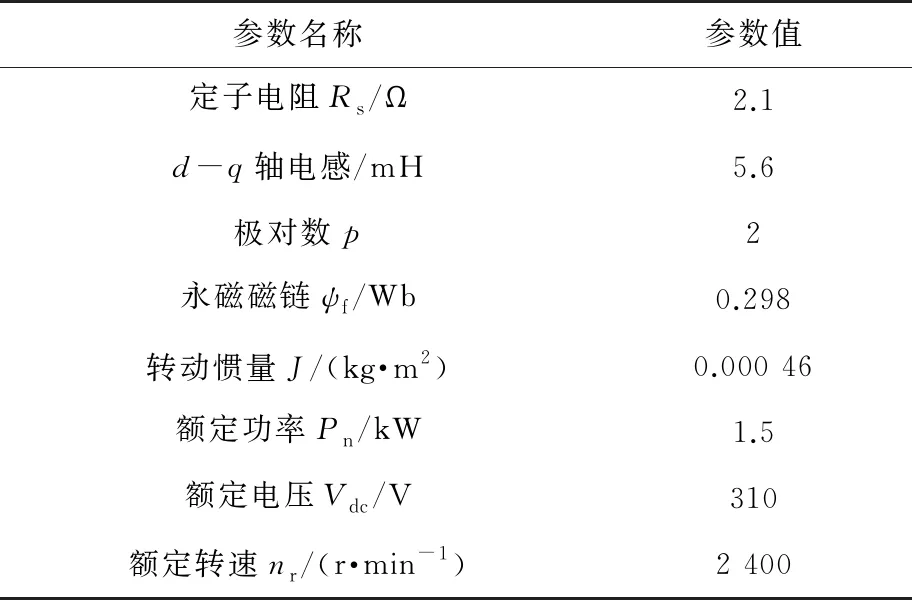
表1 PMSM参数表
下面针对传统MPCC和改进型MPCC进行仿真对比分析。仿真条件设置为电机给定转速1 000 r/min,负载转矩5 N·m,仿真时长1 s。传统MPCC和改进型MPCC的仿真结果如图5~图8所示。
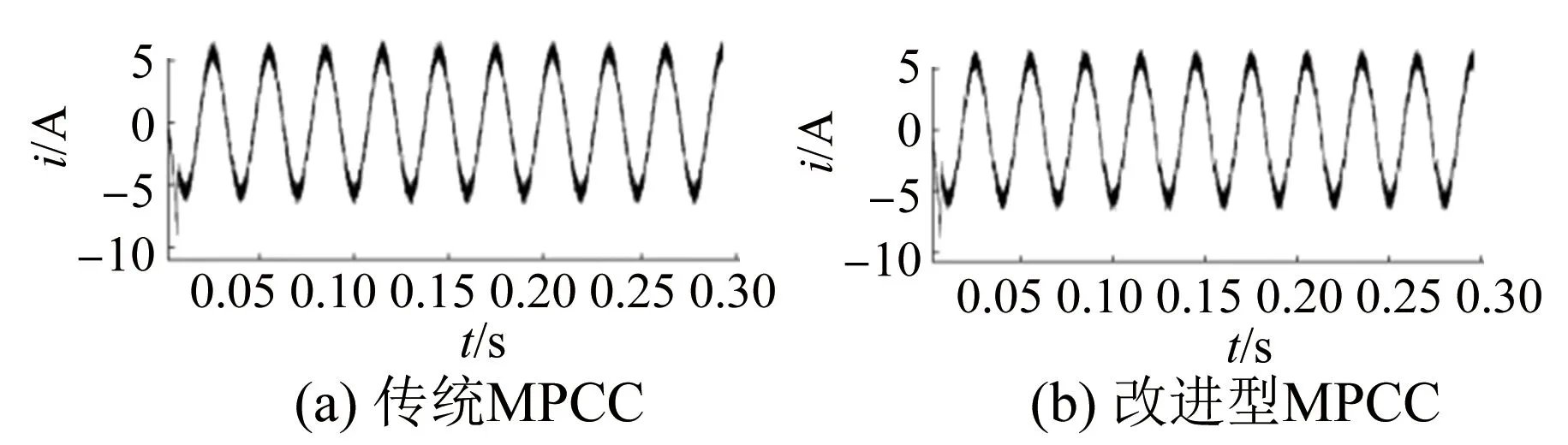
图5 相同控制频率下定子相电流波形
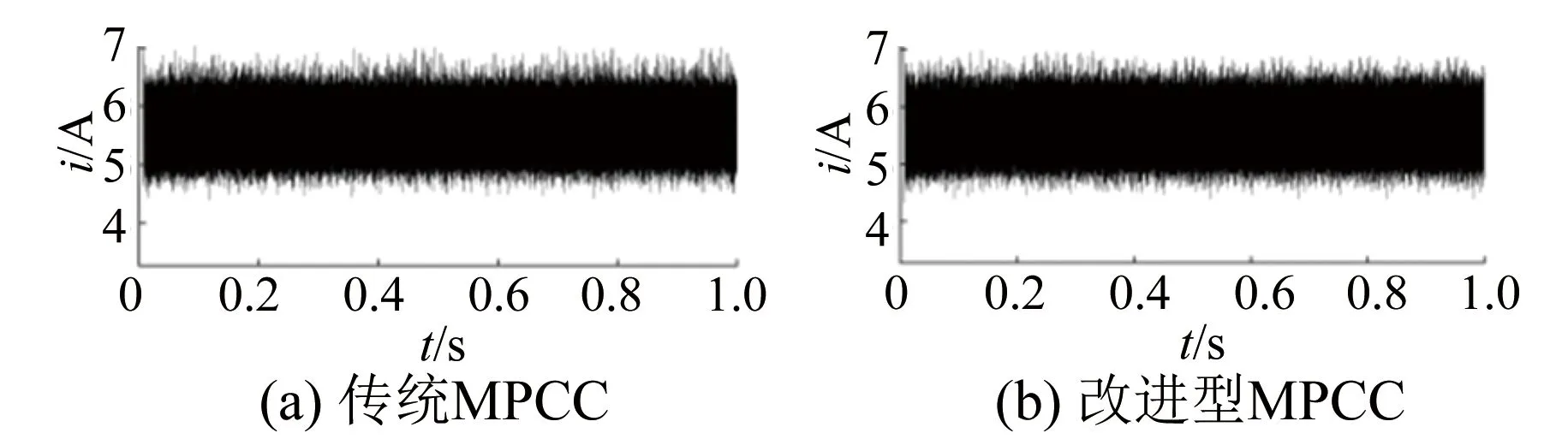
图6 相同控制频率下q轴电流波形
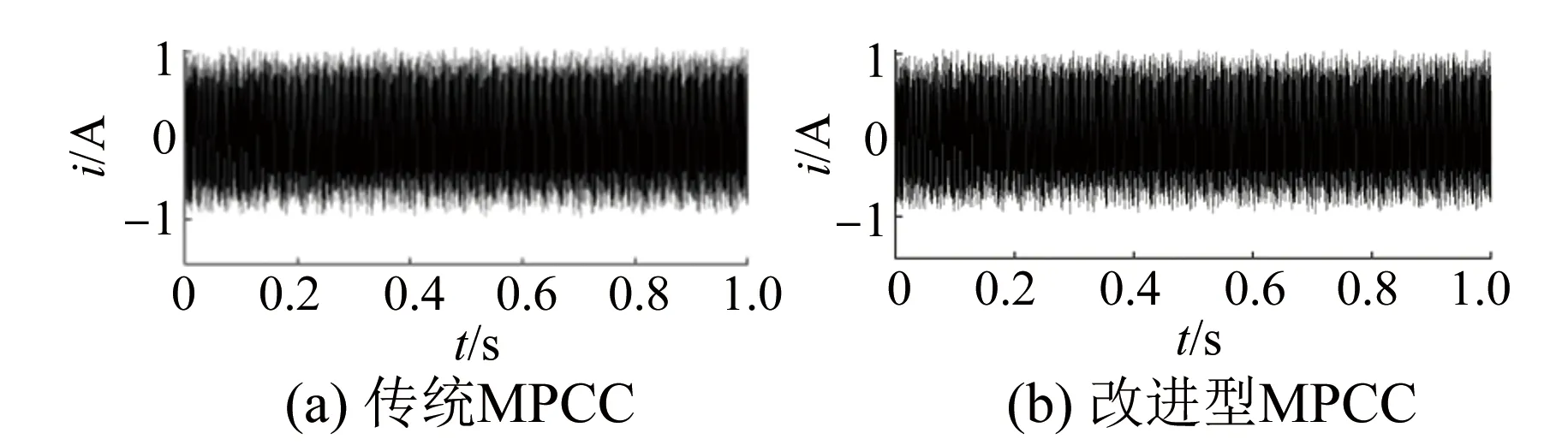
图7 相同控制频率下d轴电流波形
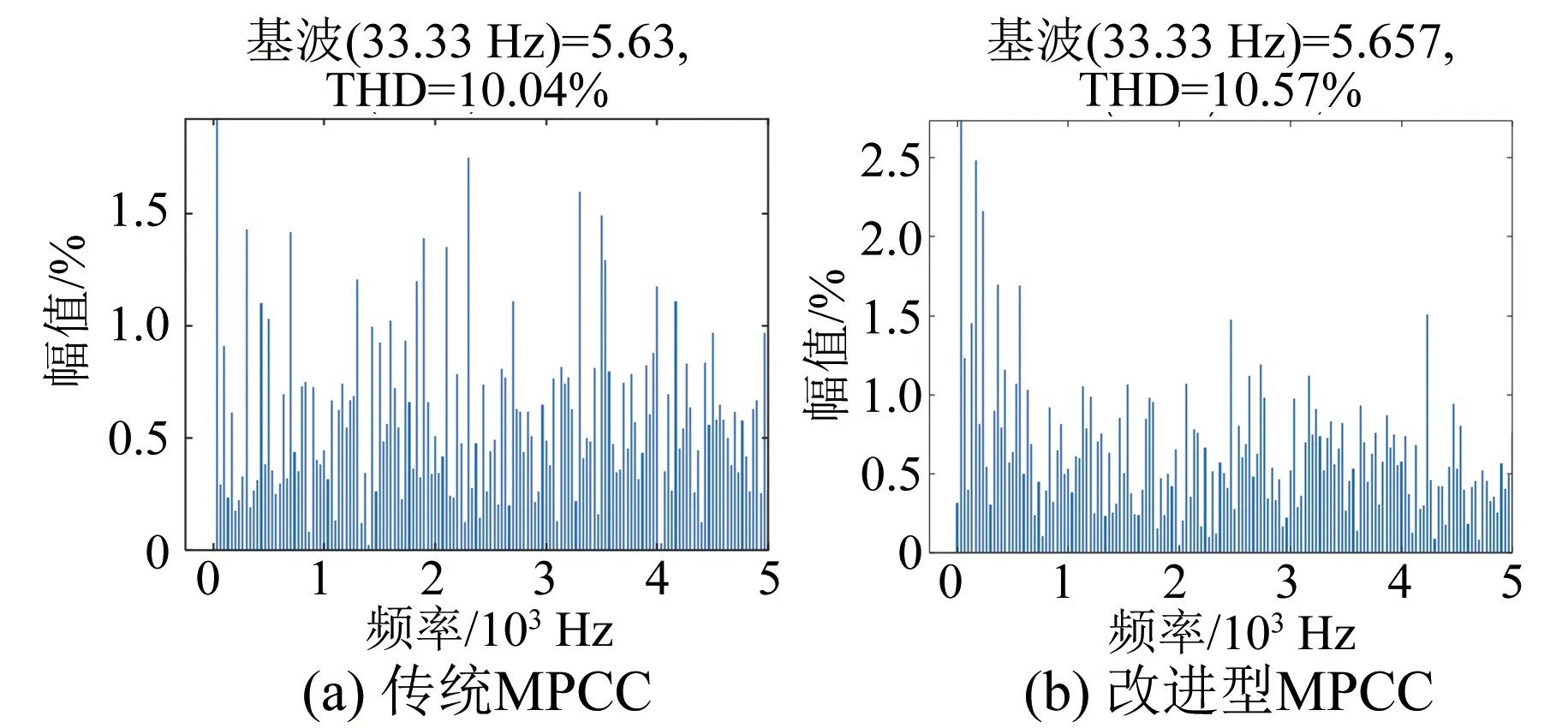
图8 相同控制频率下THD
由图5~图8的波形对比可知,传统MPCC在1 000 r/min时相电流的总谐波失真(THD)为10.04%。改进型MPCC方法在1 000 r/min时相电流的THD为10.57%,比传统MPCC的THD略有增加。
为了更全面地比较两种方法,在500、1 000、1 500、2 000以及2 400 r/min情况下对两种方法分别进行仿真对比分析,结果如图9所示。
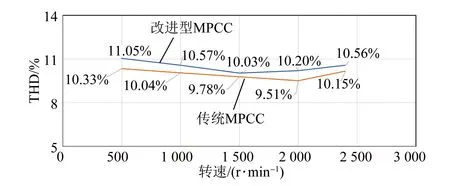
图9 不同转速相电流THD对比
由图9可知,在相同控制频率下,传统MPCC的相电流THD略低于改进型MPCC。因此相同控制频率下,传统MPCC的稳态控制性能略优于改进型MPCC。
为了更加深入地比较两种控制方法,这将两种方法的平均开关频率进行对比分析,如图10所示。
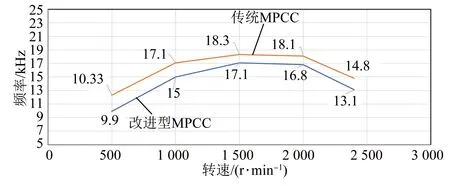
图10 不同转速下平均开关频率对比
由图10可知,改进型MPCC方法的平均开关频率在各转速段均低于传统MPCC。由此可见,相比于传统MPCC,改进型MPCC可有效降低逆变器的开关频率。
为了进一步验证改进型MPCC方法的稳态控制性能,将两种控制方法置于近似相等的平均开关频率下进行仿真测试。给定转速1 000 r/min,负载转矩TL=5 N·m,根据图10将开关频率保持在15 kHz。传统MPCC和改进型MPCC的仿真结果如图11~图14所示。
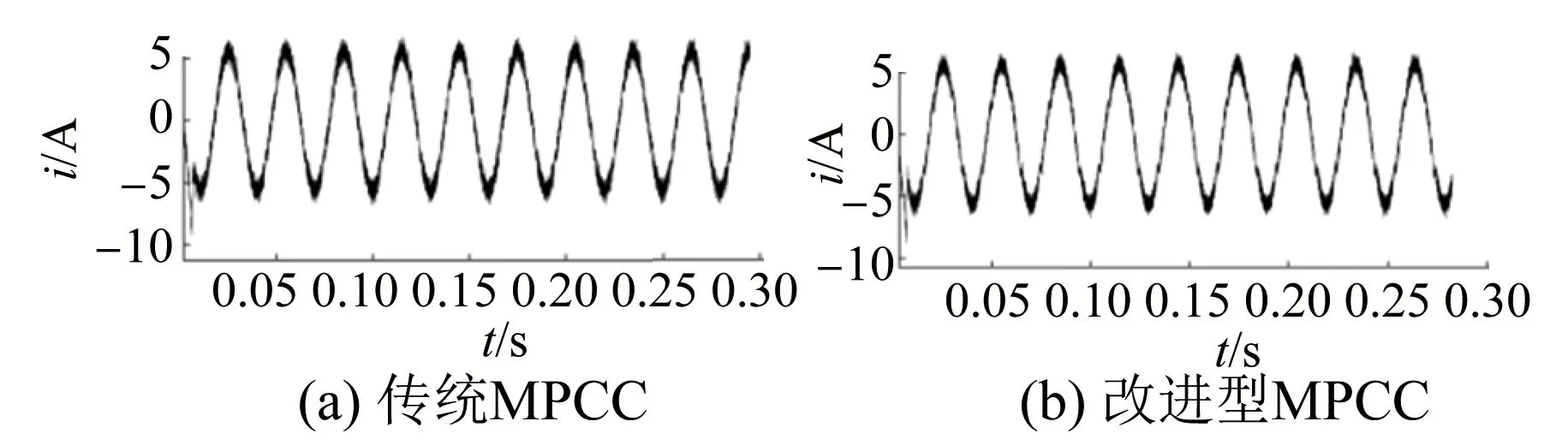
图11 定子相电流波形
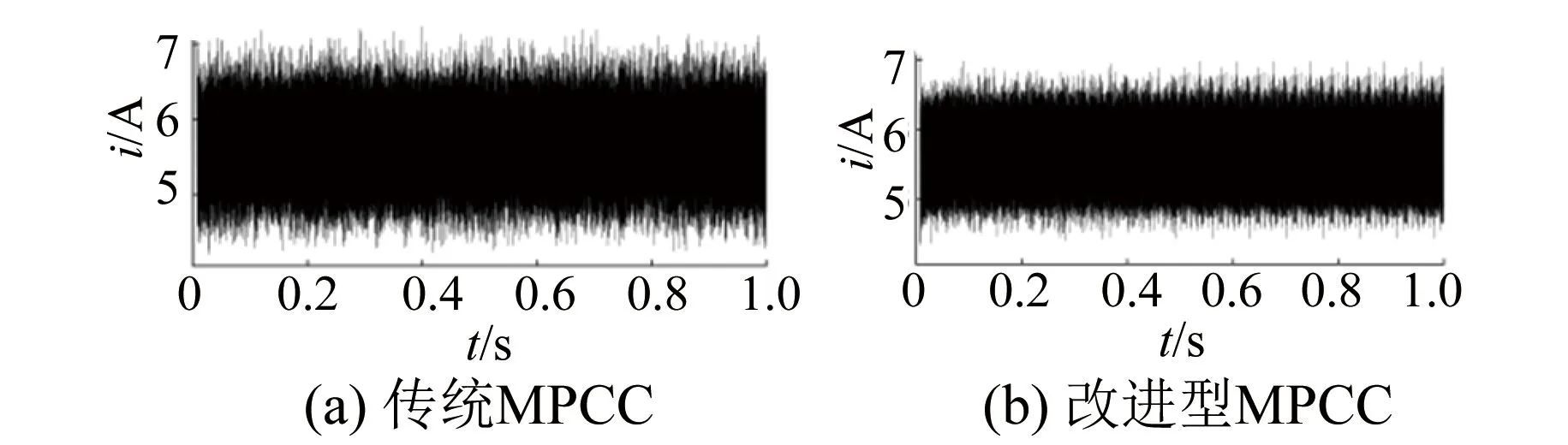
图12 q轴电流波形
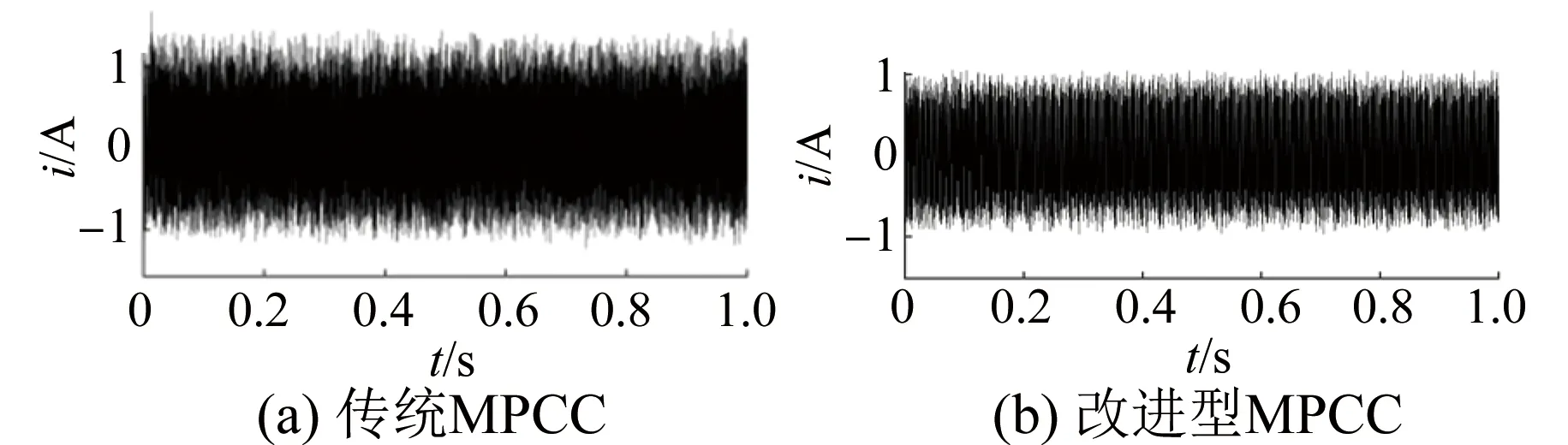
图13 d轴电流波形
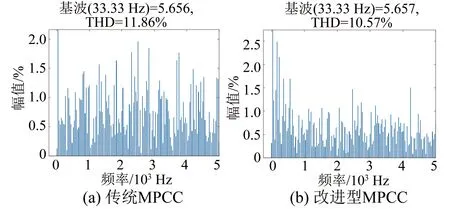
图14 相电流THD分析
由图11~图14可知,将两种控制方法的平均开关频率设置为近似相同后,传统MPCC的相电流THD从10.04%上升到了11.86%。而改进型MPCC方法,在该工况下的相电流THD为10.57%,小于传统MPCC。同时,改进型MPCC方法的d、q轴电流纹波也比传统MPCC有所改善。
将两种控制方法在各速度段均设置为近似相同的平均开关频率,并进行仿真测试,其结果如图15所示。
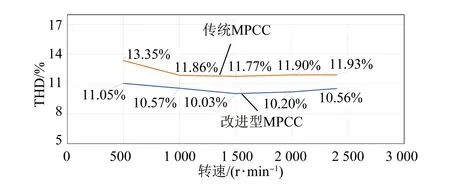
图15 不同转速相电流THD对比
由图15可知,在各速度段下,改进型MPCC方法相电流THD始终低于传统MPCC。这表明,在近似相同的开关频率下,改进型MPCC可以获得比传统MPCC更好的稳态控制效果。
为分析不同负载对平均开关频率的影响,对两种方法进行不同负载转矩的仿真对比,给定转速1 000 r/min,负载转矩分别为1、2、3、4、5 N·m。观察两种方法所对应的平均开关频率,如图16所示。

图16 相同转速不同负载开关频率对比
由图16可以看到,随着负载转矩的增大,两种方法的开关频率均有所增加,但改进型MPCC的平均开关频率始终低于传统MPCC。
为说明改进型MPCC稳态性能的一般性,给定转速1 000 r/min,在近似相同的平均开关频率下,对比两种方法在不同负载转矩下的电流THD,如图17所示。
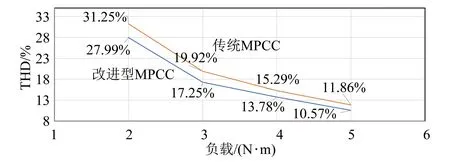
图17 不同负载转矩下的电流THD
仿真结果表明,不同转速以及不同负载转矩下,改进型MPCC方法均能获得较低的THD,这说明在近似相同的开关频率条件下,改进型MPCC方法具有更好的电流控制性能。
对仿真系统做突加负载测试。电机给定转速为2 400 r/min,给定转速斜率设为6 000 r·min-1/s,系统负载2 N·m起动,在t=1 s时突增负载5 N·m。仿真结果如图18~图20所示。
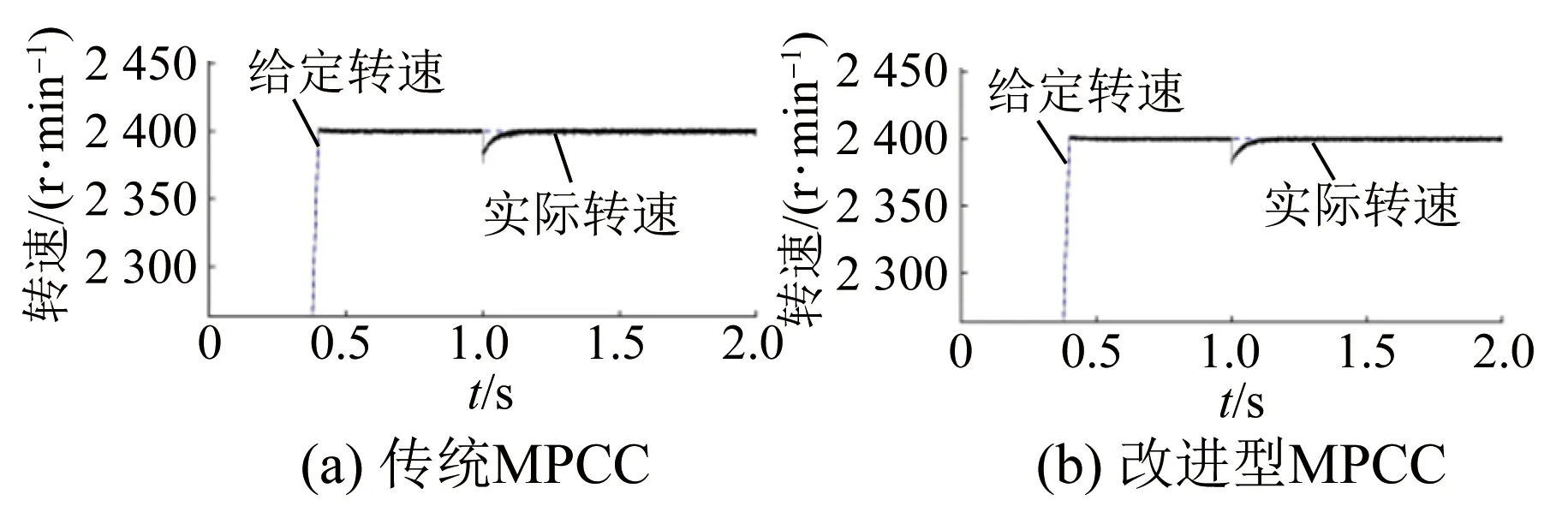
图18 突加5 N·m转速波形

图19 突加5 N·m定子相电流波形

图20 突加5 N·m时d-q轴电流波形
对仿真系统做给定转速突增、突减测试。给定转速为1 500 r/min ,负载转矩为2 N·m。 1 s时分别对给定转速突增和突减500 r/min。仿真结果如图21和图22所示。
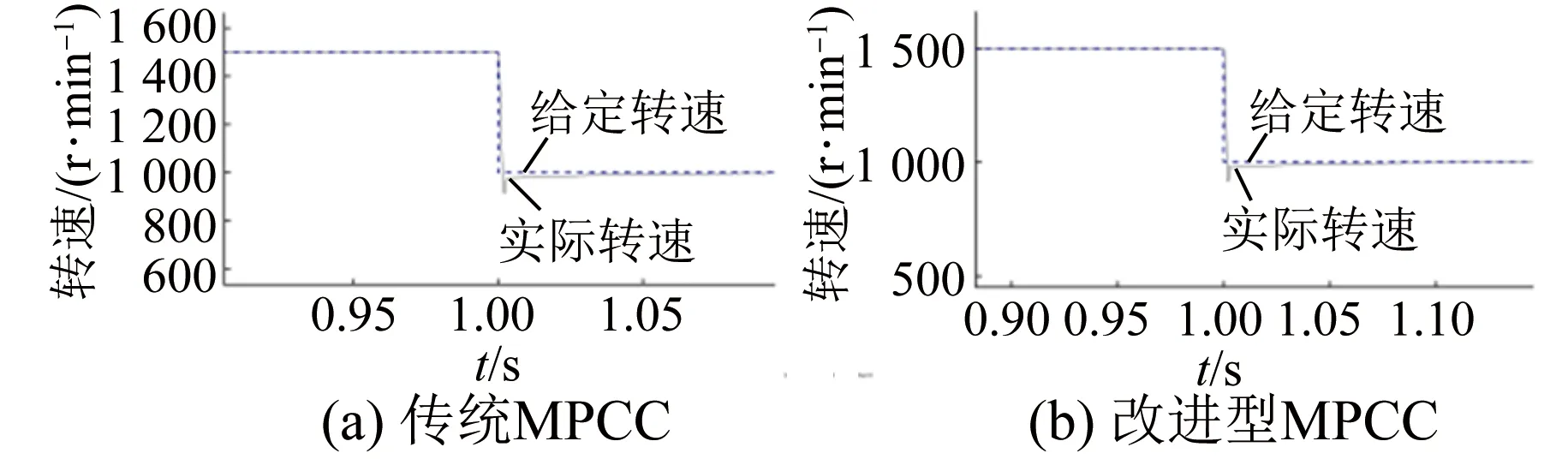
图21 给定转速突减500 r/min转速波形
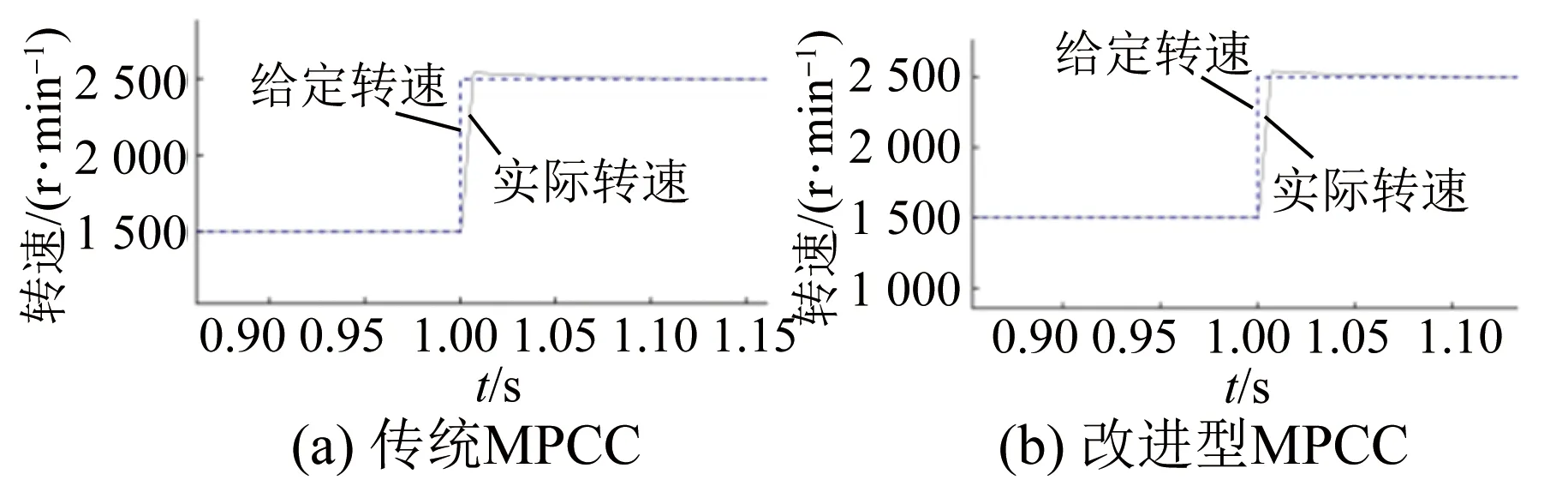
图22 给定转速突增500 r/min转速波形
由图18~图22波形的对比可知,在对电机进行突加负载和突增或突减给定转速时,改进型MPCC和传统MPCC均能够快速恢复至稳态。这表明改进MPCC和传统MPCC具有相同的动态性能。
5 结 语
为了平衡MPCC稳态控制性能与开关频率之间的矛盾,在传统MPCC的基础上,提出了一种改进型PMSM单矢量MPCC方法。该方法将两个控制周期的控制性能视为一个整体,选择相同的电压矢量作为两个控制周期的最优电压矢量,使相邻周期最优电压矢量尽量相同,来降低逆变器的开关频率。并通过计算参考电压向量所在扇区的方式来确定候选电压向量,减小了计算量。仿真结果表明,在相同的控制频率下,改进型MPCC方法,可以有效地降低开关频率。此外,在开关频率近似相等的情况下,改进型MPCC方法可以有效改善电流控制性能。
