气力针式行星轮系窄行密植精密排种器设计与试验
2023-01-05廖宜涛张百祥廖庆喜刘嘉诚李成良
廖宜涛 张百祥 郑 娟 廖庆喜 刘嘉诚 李成良
(1.华中农业大学工学院,武汉 430070;2.农业农村部长江中下游农业装备重点实验室,武汉 430070)
0 引言
菠菜等叶菜类作物采用窄行密植种植模式,通过增加单位面积内的植株数,使植株在合理密度下更好地发挥产量优势,但种植密度大,行株距小,对播种均匀性要求高[1-3],且籽粒小、质量小,因此机械化精密播种难度大,以人工播种或机械播种后间苗生产为主,生产成本高、劳动力消耗大,迫切需要开发适用播种装备。
排种器是播种装备的核心装置,其性能直接决定播种质量[4-6]。常见排种器有机械式和气力式两种[7]。目前蔬菜窄行密植播种应用的排种器以窝眼轮机械式排种器为主[8-9],具有结构简单、成本低等优点,但受取充种方式影响,存在易卡种造成漏播率较高、种子破损率较高等问题。气力式排种器对种子外形尺寸要求不严,通用性好,对种子损伤小,播种精度高,已广泛应用于玉米、大豆、棉花等宽行低密度作物的精密播种[10-14]。在气力式窄行密植排种技术方面,文献[15-16]研制的窄行距排种器主要用于2~4行的密植排种,更多行数的播种需要配置多个排种器,播种机的传动和配气系统较为复杂。在穴盘苗播种中,多采用滚筒式和板针式等结构,实现一器6行以上的窄行密植精密播种[17-18],但在大田生产上,由于相应播幅较宽、排种器连续工作等要求,滚筒式与气室密封结构复杂,长时间作业气压稳定性差;板针式多采用往复式结构,作业效率较低。课题组前期针对窄行密植作物单粒精密播种问题,设计了一种采用两端气室、回转气力针式结构的排种装置,解决了排种器工作时气室与滚筒密封性差的问题,可实现24行并联单粒排种,单粒精密排种合格指数达90%以上,但排种器是水平位置投种,投种高度偏高,存在下落种子与种床土壤弹跳滑移导致播种粒距不均的问题[19];在该排种器基础上设计点播式全约束导种装置,实现了单粒排种和平稳导种于一体的功能,消除了种子与土壤的碰撞弹跳现象,播种机穴粒数合格率为86.2%,穴距合格率为93.9%,但排种装置和导种装置分布排列,整机结构较复杂,质量较大[20]。
本文基于前期气力针式排种器和导种机构,设计一种采用行星轮系排种机构的气力针式窄行密植精密排种器,通过行星轮系机构和气流分配管吸种针的配合,改进原有吸种针运动轨迹,吸种时降低吸种针与种子的相对运动速度,投种时降低种子与种床的高度,以提高播种性能。
1 排种器结构与工作原理
1.1 排种器结构
气力针式行星轮系窄行密植精密排种器结构如图1所示,主要由行星轮系排种机构、机架、左气室、种仓、右气室等组成。其中,行星轮系排种机构为实现低速吸种、低位投种的关键,主要包括行星轮系机构、气流分配管、吸种针和链轮等。

图1 气力针式行星轮系窄行密植精密排种器结构示意图
排种器为对称结构,行星轮系排种机构两端各有一个气室,气室主体内设计有气室隔板将气室圆周区域分割为300°的负压区和60°的正压区,气室正压区一侧隔板与竖直方向夹角为0°,另一侧隔板与竖直方向夹角为60°;行星轮系机构包括固定在太阳轮轴上的太阳轮和4个绕太阳轮转动且均匀对称分布在行星轮架上的行星轮;吸种针根据播种行距安装在气流分配管上[17],气流分配管与行星轮固定连接并穿过行星轮架通到气室内,驱动轮与行星轮架为刚性连接的一体结构,驱动轴在动力驱动下带动行星轮架转动,进而带动行星轮和气流分配管转动。
1.2 工作原理
排种器工作过程可分为吸种区、携种区、投种区和过渡区4个阶段,其中充种区、携种区和过渡区为负压区,投种区为正压区,如图2所示。
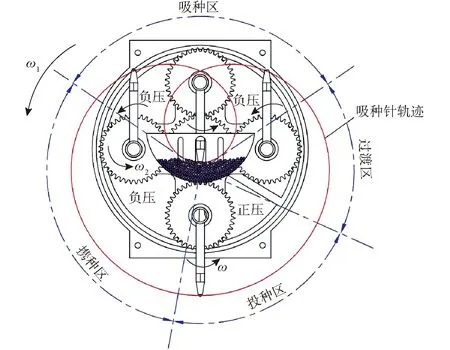
图2 气室工作区域与排种器工作原理图
排种器工作时,位于气室外侧驱动轴上的链轮在动力作用下带动行星轮架以角速度ω1逆时针转动,太阳轮固定不动,行星轮架带动行星轮逆时针转动,同时行星轮与太阳轮啮合,行星轮绕太阳轮以角速度ω2逆时针自转,与行星轮固接的气流分配管同步转动,进而带动吸种针转动。气流分配管运动到种仓正上方时吸种针竖直向下,在负压作用下单粒吸种,经过携种区进入投种区,气流分配管运动到种仓正下方时吸种针同样竖直向下,在正压、自重作用下卸种,完成投种作业后吸种针经过过渡区再次到达种仓正上方进行吸种动作,如图2所示。排种器连续工作,气流分配管和吸种针将种子群转变为均匀单粒种子,行星轮系排种机构保证吸种针特定轨迹,实现在吸种区低速吸种和在投种区低位投种。
2 吸种与投种环节分析
吸种环节是排种过程初始环节,种子在行星轮系排种机构的作用下从种仓由种群定量分离形成连续种子流;投种环节是种子保持均匀有序状态入土的末端环节,平稳运移来的单粒等间隔种子流被运送到投种区进行投种;通过行星轮系的运动带动气流分配管绕太阳轮公转,同时又与行星轮同步自转,气流分配管上的吸种针完成高位低速吸种和低位零速投种。吸种与投种环节既影响种子的有序状态,又决定种子入土后分布均匀性。因此,为保证排种器性能,需开展排种过程的吸种和投种环节种子运动规律和轨迹研究,为排种器关键部件结构与尺寸设计提供依据。
2.1 吸种环节分析
2.1.1吸种环节受力分析
吸种环节理想状态为单粒种子吸附在吸种针上并随其一起转动,对种子的运动和受力进行分析,以菠菜密植单粒精密播种为例,菠菜种子可看作球体,种子的受力情况如图3所示,吸种针完成吸种,下一瞬时离开种仓进入携种区,此时被吸附单粒种子满足吸种受力平衡方程为

图3 吸种环节种子受力分析
(1)
其中
(2)
式中FQ——吸种瞬间种子所受吸附力,N
G——种子自身重力,N
FL——种子受到的离心力,N
FN1——种子受到吸种针的支持力,N
FN2——种子受到种群的支持力,N
FS1——种子受到吸种针的摩擦力,N
FS2——种子受到种群的摩擦力,N
ω——吸种针角速度,为驱动轴公转角速度ω1与行星轮自转角速度ω2矢量和,rad/s
RL——吸种针末端种子运动半径,mm
β——吸种角,(°)m——种子质量,kg
φ1——种子与吸种针之间滑动摩擦角,(°)
φ2——种子的自然休止角,(°)
由式(1)、(2)可得
FQ=mω2RL+

(3)
当FN2=G时,有
FQ=mω2RL+
(4)
由式(4)可知,单粒吸种所需吸附力FQ与种子自重、吸种角β、吸种针角速度ω、吸种针末端种子运动半径RL、种子物料特性(滑动摩擦角φ1、自然休止角φ2)等有关。
吸种阶段主要是实现种子被单粒吸附、有序运移,保证排种均匀。气力式排种器单粒吸种概率除受气压、型孔直径影响外[21-23],同时受型孔与种子吸附作用时间影响,因此合理设计吸种针运动轨迹,降低吸种针在种仓内的运动速度,增加吸种作用时间,可以提高排种器的吸种性能。
2.1.2吸种环节运动轨迹分析
吸种动作对实现单粒稳定吸种起关键的作用,吸种时,吸种针划过种仓,可增加种群扰动、减少吸种区种子群的内摩擦力和被吸附种子运移阻力,吸种针与种子的相对运动是影响吸种效果的重要因素,因此吸种环节运动轨迹重点分析其相对运动轨迹。行星轮系排种机构是保证吸种针实现特定轨迹的关键结构,其机构简图如图4所示。为保证吸种针端点特定运动轨迹和特定吸种点,行星轮M1、M2、M3、M4与气流分配管上的吸种针初始安装位置为-90°、0°、90°和180°,即圆心M1、N1、M3共线,圆心M2、N1、M4共线。

图4 行星轮系排种机构结构简图
通过行星轮系机构与气流分配管和吸种针相结合,使排种器实现低位投种,吸种针端点P和气流分配管圆心(行星轮中心)Q的运动轨迹如图5所示。排种机构运动1周,Q的运动轨迹为圆形,吸种针端点P依次经历不同的工作段轨迹:气流分配管圆心在点a和点c时吸种针竖直向下,在点b和点d时吸种针竖直向上,根据排种器工作过程,DF段为吸种段的运动轨迹,点E是上半周的最低点,吸种针运动到点E附近时进行吸种,点D为吸种针与种群接触的初始点,点F为吸种针与种群接触的最末点,下一瞬时吸种针离开种仓;FA段为携种段的运动轨迹,点A为下半周的最低点,吸种针运动到点A附近时进行投种,AD段为回转段的运动轨迹。
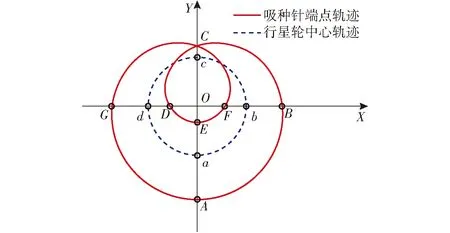
图5 排种机构相对运动轨迹
吸种针呈并联结构,其端点的运动轨迹相同,取单个分析,以太阳轮中心为坐标原点,建立如图5所示的直角坐标系,行星轮中心的轨迹为一圆形,吸种针端点的运动是两个运动的合成,当行星轮中心转动角度为θ时,吸种针端点转动角度为2θ,逆时针转动方向为正。根据几何关系,行星轮中心的坐标方程为
(5)
吸种针端点的运动轨迹方程为
(6)
式中X0、Y0——行星轮中心坐标
X、Y——吸种针端点坐标
R——行星轮半径,mm
L——吸种针长度,mm
φ0——初始相位角,图5为90°
θ——行星轮转过角度,(°)
对吸种针端点的速度进行分析,将式(6)对时间进行求导,得到吸种针端点速度表达式为
(7)
对吸种针端点的加速度进行分析,将式(7)对时间求导,得到吸种针端点加速度表达式为
(8)
式中α——吸种针角加速度,rad/s2
由式(6)~(8)可知,影响行星轮系排种机构运动学特性的关键参数是行星轮半径R和吸种针长度L。行星轮半径R与排种机构的运动范围有关,吸种针长度L影响吸种针与种群接触程度。
2.2 投种环节分析
2.2.1受力分析
投种时,气流分配管内的负压变成正压,种子在自重和正压作用下离开吸种针,对卸种瞬间种子受力进行分析,如图6所示,此时种子应满足的力学方程为
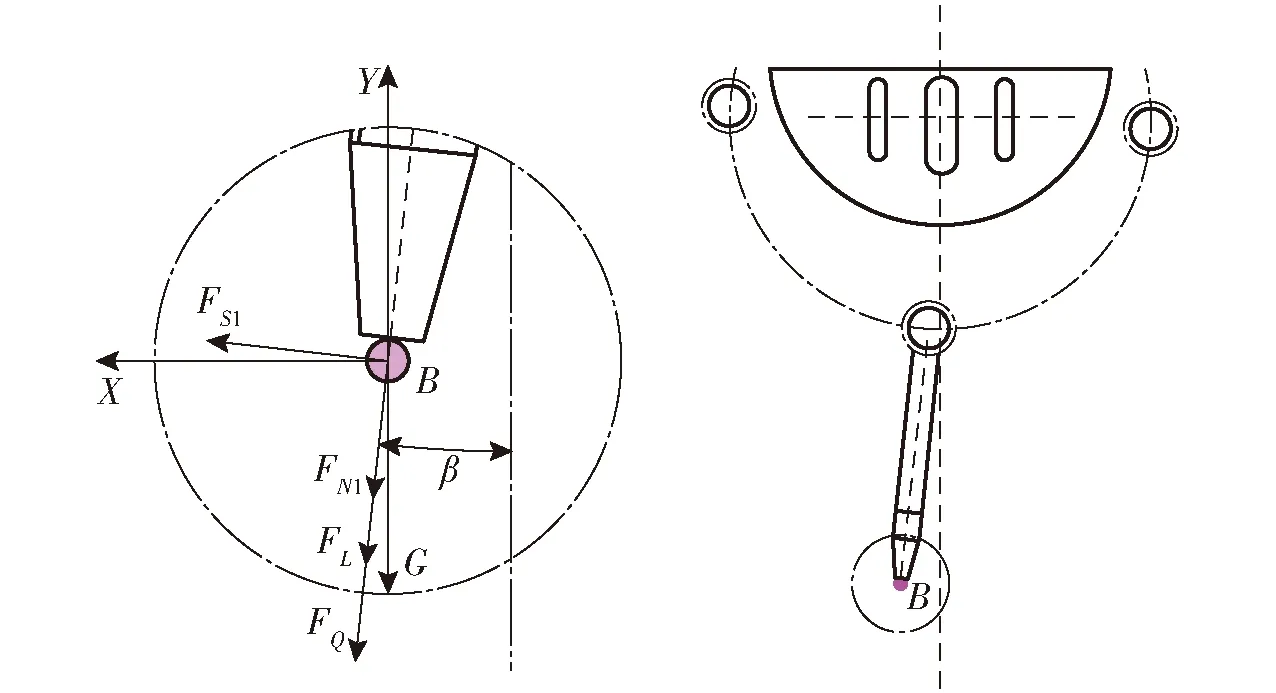
图6 投种环节受力分析
(9)
其中
(10)
由式(9)、(10)可得
(11)
式中an——法向加速度,m/s2
由式(11)可知,卸种瞬间种子所受的吸附力FQ与种子自重、投种角β、吸种针角速度ω、吸种针末端种子运动半径RL、种子滑动摩擦角φ1等有关。
投种阶段影响种子入土状态,气力式排种器投种时种子从脱离型孔到落入种床土壤过程受惯性力、重力和正压力作用,种子做自由落体运动,投种角决定正压区位置,即投种高度。投种高度越低,种子与种床土壤碰撞弹跳滑移现象概率越小,有利于提高种子分布均匀性,因此合理设计气室正压区位置,降低投种高度,减小投种时种子的水平初始速度使其达到零速投种,可以提高排种器投种精度。
2.2.2运动轨迹分析
吸种针投种轨迹决定投种点位置,直接影响排种器投种精度,吸种针与地面的绝对运动是确保排种器满足合格粒距以及保证粒距均匀性的重要因素,因此投种环节运动轨迹重点分析其绝对运动轨迹。同样以太阳轮中心为坐标原点,排种器作业时前进方向为X轴正向,过坐标原点垂直向上为Y轴正向建立坐标系。吸种针端点绝对运动轨迹如图7所示,其中,C1、C2、C3为吸种点,A1、A2、A3为投种点,H为株距。
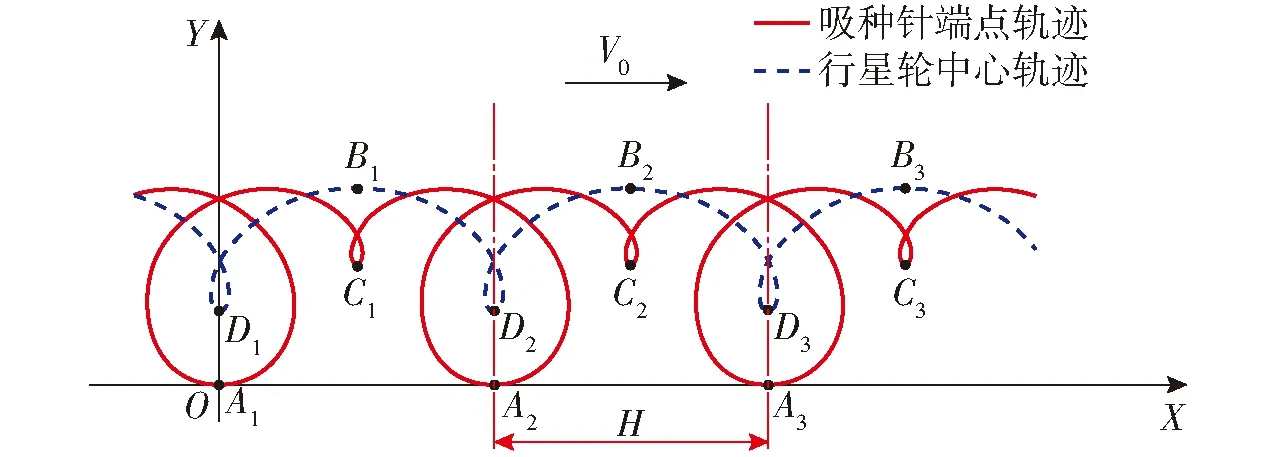
图7 排种执行机构绝对运动轨迹
实际作业中,行星轮架一边绕坐标原点O作匀速圆周运动,一边由机架牵引作前进运动,行星轮中心的运动轨迹为余摆线,根据几何关系,其坐标方程为
(12)
式中V0——排种器前进速度,m/s
吸种针端点的绝对运动轨迹方程和速度表达式分别为
(13)
(14)
则吸种针端点P绝对速度为
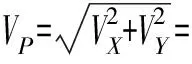

(15)
为保证实际工作过程中在确定株距下动轨迹(绝对运动轨迹)的实现[24],引入速比特征系数λ
(16)
式中R1——回转半径,太阳轮中心o与行星轮中心的距离,mm
N——吸种针并联数量
根据窄行密植种植模式,排种器理论株距设计为80 mm,为保证排种器排种质量,排种器排种转速需保持在一定范围内,排种转速与前进速度之间的匹配关系是考虑的关键因素,确定排种器前进速度为
(17)
由式(13)~(17)可知,投种绝对运动轨迹与排种器前进速度、行星轮系排种机构回转半径和排种转速等因素有关,λ主要取决于回转半径,影响排种器前进速度。
2.3 吸种针运动仿真分析
为探究排种器吸种针运动规律和排种器实现高位低速吸种、低位零速投种条件,在SolidWorks 2018中完成排种器三维实体模型设计装配,导入ADAMS 2018中进行运动仿真分析,设置运动循环周期为 6 s,排种器吸种针端点仿真运动轨迹和位移与速度曲线(相对运动轨迹下)如图8所示。

图8 吸种针端点仿真轨迹和位移与速度曲线
根据排种器工作过程,在一个运动循环周期内,结合相对运动轨迹下的位移曲线与速度曲线,吸种针端点的运动过程可分为回转段、吸种段、携种段和投种段4个阶段:
(1)回转段指吸种针完成投种后运动至充种区的过程,如图8a中P1P2段。由图可知,吸种针投种后从最低点上升运动到过渡区,P1A段横向位移增大,纵向位移减小,点A回转段横向位移最大,纵向位移为0;由图8c、8d可知AC段横向位移减小,纵向位移增大,点B纵向位移最大,吸种针端点速度从0增加到2(L-R)ω;CP2段横向位移从0减小到最小值,纵向位移逐渐增大,运动到点C时横向位移为0,点D为前半个周期位移最小点,BD段速度从0增加到2(L+R)ω,速度加快可减少过渡区时间。
(2)吸种段指吸种针处于种仓正上方时的运动轨迹,如图8a中P2P3段。吸种针运动到吸种区,P2E段横向位移从最小值增加到0,点E为吸种针与种床接触最低点,吸种针竖直向下,保证与种群接触充分;EP3段横向位移增大,纵向位移增大,吸种针离开种仓。由图8d可知,P2P3段吸种针与种群接触时速度减小,吸种后速度增加离开种群,速度降低可以增加充种时间,即型孔与种子群接触时间,保证充分吸种提高充种概率,吸种完成离开种群速度增大可减小重吸概率。
(3)携种段指吸种针离开种仓运动至投种口前的运动过程,如图8a中P3P4段。结合图8c、8d可知,携种段轨迹与回转段一致,P3G段横向位移减小,纵向位移增大,速度增大到最大值2(L+R)ω;GJ段横向位移增大,纵向位移减小;JP4段横向位移减小,纵向位移增大,点J携种段横向位移最大,纵向位移为0,吸种针端点速度减小到2(L-R)ω,此时绝对速度为V0-2(L+R)ω。
(4)投种段指吸种针运动至投种口时与投种完成下一瞬时离开正压区的运动轨迹,理想状态下,吸种针在点P4进行投种。由图8c可知,点P4横向位移为0,纵向位移最大;当播种机以V0速度匀速前进时,吸种针端点线速度方向与前进方向相反,吸种针到达投种区投种时绝对速度从V0-2(L+R)ω逐渐减小至0,速度降低实现零速投种,保证种子在种床分布均匀。根据式(16),计算得速比特征系数λ=1.53,投种完成后吸种针经过回转段进入下一运动循环周期。
仿真试验结果表明,一个运动循环周期内存在一个上半周的最低点E和一个下半周的最低点P1(P4),可以保证吸种针在上半周最低点吸种,实现低速吸种,在下半周最低点投种,实现低位零速投种。吸种针的运动轨迹是排种器设计的关键,通过对比仿真轨迹与理论轨迹可知[25-26],两者整体基本一致,初步验证了该排种器的运动规律满足设计要求。
行星轮系排种机构确定了吸种针的运动轨迹,气流分配管和吸种针的运动是两个相对运动和一个机器前进运动的合成:机器前进运动,地轮通过链传动带动行星轮架转动,行星轮架带动气流分配管和吸种针转动,行星轮系机构带动气流分配管和吸种针绕太阳轮转动,即气流分配管和吸种针随行星轮架转动的同时受行星轮约束作用转动。
卸种后种子在惯性作用下有一线速度,由图9可知,下落的种子在重力和正压的作用下做自由落体运动。投种时种子水平初始速度越小,投种精度越高,投种点种子水平初始速度VC为
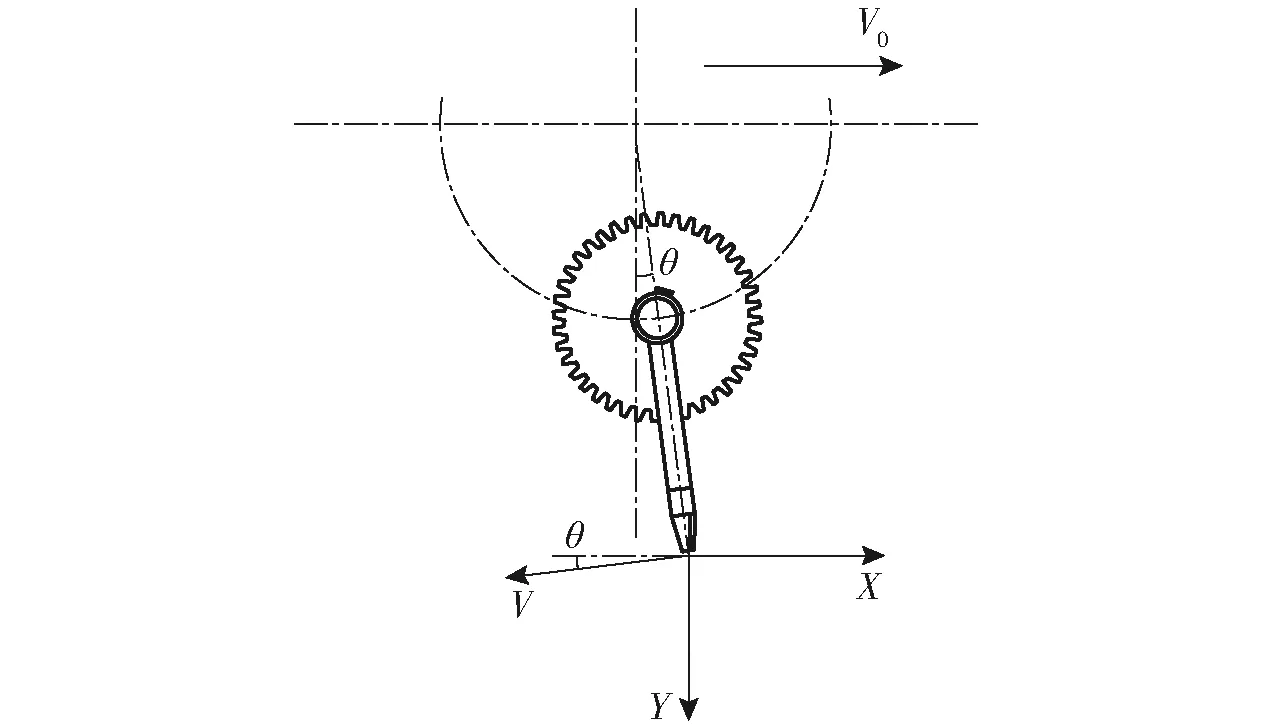
图9 投种过程运动分析图
VC=V0-Vcosθ
(18)
其中
V=ωRL
(19)
式中V——种子具有的线速度,m/s
由式(18)可知,当吸种针角速度和吸种针末端种子运动半径一定时,θ=0°,投种点种子水平初始速度VC最小,即吸种针在正下方轨迹最低点投种,低位投种降低了投种点与种沟垂直高度,在一定程度上降低种子与种床土壤碰撞弹跳滑移。零速投种是种子水平分速度与排种器前进速度大小相等,方向相反,可有效提高排种合格指数[27-29]。实现零速投种即需要保证卸种后种子下落过程中X方向合速度为0,即
VC=0
(20)
即
V0=Vcosθ
(21)
由式(18)和式(21)及结合仿真分析可知,排种器满足低位零速投种的条件是:投种角θ=0°(低位投种);λ=1.53(零速投种,此时排种器前进速度V0等于种子在最低点的切线速度V)。
3 排种器关键部件设计
3.1 行星轮系机构
行星轮系机构为对称结构,左右两侧均包括1个太阳轮和4个行星轮,结构如图10所示,通过对排种过程的分析,结合设计要求,需满足

图10 行星轮系机构
(22)
式中Z1——太阳轮齿数
Z2——行星轮齿数
D1——太阳轮直径,mm
D2——行星轮直径,mm
R2——行星壳盘外壁沿半径,mm
M——齿轮模数,mm
结合设计要求及装配关系,选定齿厚为10 mm、模数为2 mm、压力角为20°的直齿圆柱齿轮,计算得出行星轮与太阳轮齿数Z1=Z2=39,行星壳盘外壁沿半径R2=130 mm。
3.2 吸种针和气流分配管
以菠菜为播种对象,采用墨绿先锋菠菜种子,其平均三轴尺寸为3.69 mm×3.25 mm×2.36 mm,几何平均宽度为3.05 mm。吸种针直管内径为10 mm,根据
DX=(0.64~0.66)B
(23)
式中B——种子几何平均宽度,取3.05 mm
计算得出吸种针型孔直径为2.00 mm,吸种针通过螺纹连接固定在气流分配管上。
气流分配管与行星轮数量相同,气流分配管上布置吸种针,通过对排种过程的分析,结合前期研究和播种农艺要求,4根气流分配管对称分布,设定播种行距为70 mm,播种行数为12行,气流分配管内径为20 mm,满足气流分配管内径大于全部吸种针末端种子吸附面过流面积的要求[19]。
3.3 种仓
种仓底部为弧形结构,与吸种针运动轨迹相符,并保证种仓底部弯曲弧形S2大于吸种针的回转弧形轨迹S1,保证良好的吸种效果。吸种针长度L、行星轮与太阳轮中心距离R1等参数都会影响种仓结构尺寸,定义吸种针长度L与行星轮、太阳轮中心距离R1比值为系数K,K直接影响吸种针端点在吸种区的轨迹。
图11a是系数K取0.5、1.0、1.2、1.5、2.0时吸种针端点在吸种区运动轨迹。由图11a可知,吸种针在点b处于吸种最低点,当K=2.0时,吸种针在点c2.0开始吸种,至c′2.0时完成吸种,当K=0.5时,吸种针在点b0.5完成吸种。因此,速比系数影响吸种针吸种时间,且K越大吸种时间越长,有利于提高排种器吸种性能,当速比系数过小时吸种针只与种群最上层接触,下层种子无法完成吸种。
排种机构设计为多行并联结构,根据装配关系,L需小于相邻两根气流分配管的中心距Ld1,种仓宽度DC需小于对称两根气流分配管的中心距Ld2,其中
(24)
式中R——行星轮分度圆半径,取39 mm
经计算确定K=1.2,L=95 mm,DC=130 mm,如图11b所示,根据排种器种仓安装位置,设计种仓高度HC=60 mm。

图11 不同K值时吸种针端点在吸种区的轨迹
4 排种性能试验
4.1 试验材料与装置
试验材料选用菠菜种子,试验时种子含水率为37.3%,千粒质量为9.13 g。试验装置采用BENETECH GM520型手持式风压表测定风机出风口和进风口气压,排种性能检测装置采用华中农业大学自主研制的小粒径种子精量排种器种子流传感装置[30],排种性能试验如图12所示。单因素试验排种转速、吸种负压和卸种正压与排种性能指标关系曲线如图13所示。
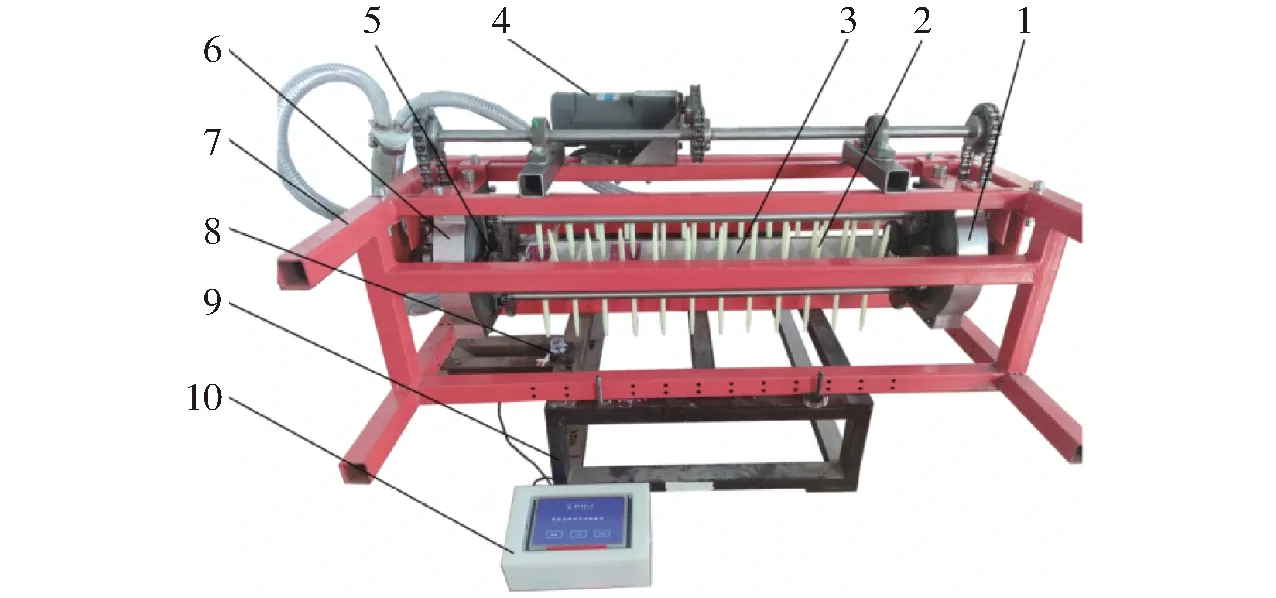
图12 排种性能试验装置实物图

图13 排种转速、吸种负压和卸种正压与排种性能指标关系曲线
4.2 试验设计与方法
由前期研究进展[19]可知,排种转速、吸种负压和卸种正压对排种性能有较大影响,因此选择三者为试验因素,为寻求最佳参数范围,进行三因素五水平二次回归正交旋转组合试验,根据GB/T 6973—2005《单粒(精密)播种机试验方法》选择排种合格指数Y1、重播指数Y2、漏播指数Y3为评价指标,试验因素编码如表1所示,每组试验重复3次,取平均值作为试验结果,每组试验统计排种器稳定工作状态连续排出的251粒种子。
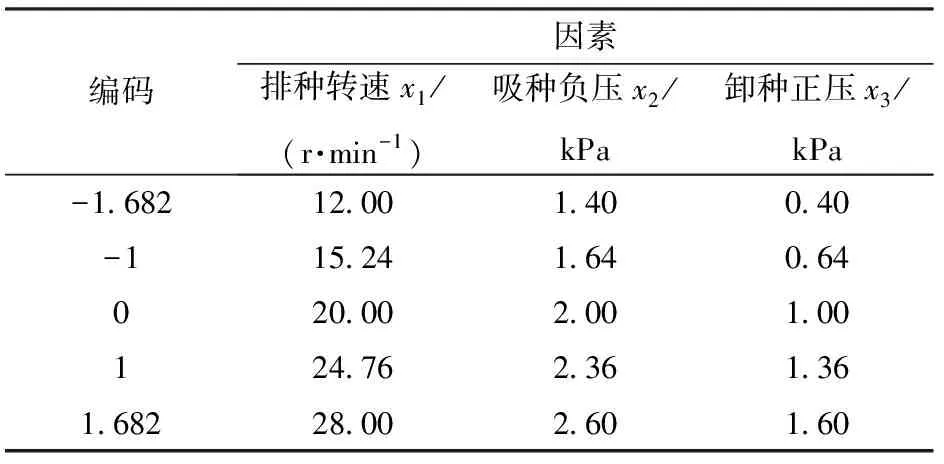
表1 试验因素编码
根据前期预试验和单因素试验结果,确定排种转速为12~28 r/min,以4 r/min为增量,吸种负压为1.4~2.6 kPa,卸种正压为0.4~1.6 kPa,以0.3 kPa为增量。
4.3 结果与分析
4.3.1试验结果
根据三因素五水平正交旋转组合试验方案,共开展20组试验,试验结果如表2所示。X1、X2、X3为排种转速、吸种负压和卸种正压编码值。

表2 正交试验结果
4.3.2回归模型的建立与显著性检验
运用数据处理软件Design-Expert 10.0对试验数据进行多元回归拟合,对试验结果进行回归分析,建立合格指数、重播指数、漏播指数与排种转速、吸种负压、卸种正压之间的回归方程,并对试验结果和回归方程进行方差分析,结果如表3所示。
(1)合格指数Y1
通过对试验数据分析,多元回归拟合得到各因素影响合格指数的回归模型为
Y1=90.29-2.32X1+1.04X2-0.34X3+0.55X1X2-

(25)

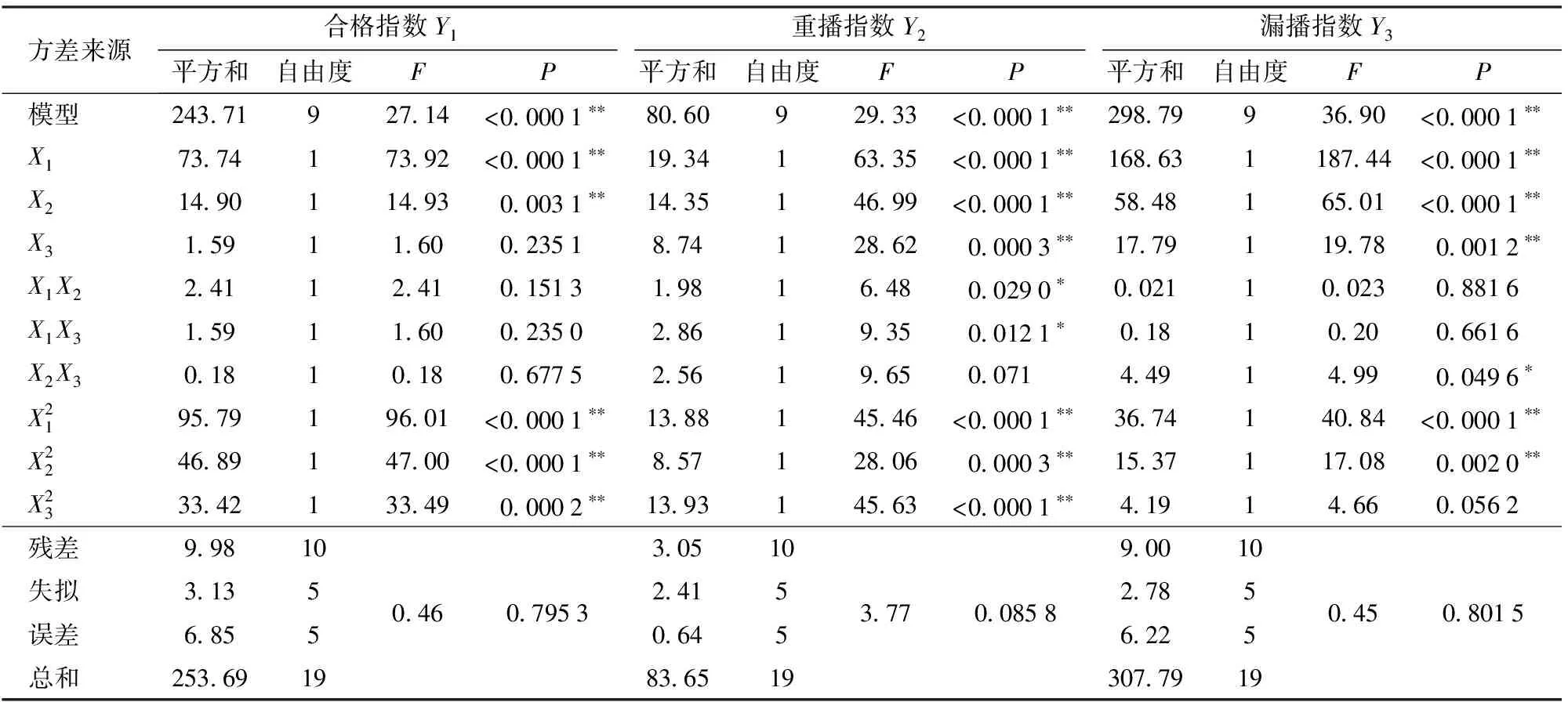
表3 回归方程方差分析
Y1=90.29-2.32X1+1.04X2-

(26)
通过对式(26)回归系数的检验,得到合格指数的因素影响由大到小为:排种转速、吸种负压和卸种正压。
(2)重播指数Y2
通过对试验数据分析,多元回归拟合得到各因素影响重播指数的回归模型为
Y2=3.61-1.19X1+1.02X2-0.8X3-0.5X1X2+

(27)

Y2=3.61-1.19X1+1.02X2-0.8X3-0.5X1X2+

(28)
通过对式(28)回归系数的检验,得到重播指数的因素影响由大到小为:排种转速、吸种负压和卸种正压。
(3)漏播指数Y3
通过对试验数据分析,多元回归拟合得到各因素影响漏播指数的回归模型为
Y3=6.1+3.51X1-2.07X2+1.14X3-0.051X1X2-

(29)
Y3=6.1+3.51X1-2.07X2+1.14X3-

(30)
通过对式(30)回归系数的检验,得到漏播指数的因素影响由大到小为:排种转速、吸种负压和卸种正压。
4.4 各因素对合格指数的影响
通过Design-Expert 10.0对数据进行处理,可得到排种转速X1、吸种负压X2和卸种正压X3对合格指数的影响规律,其响应曲面如图14所示。
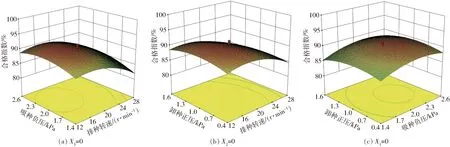
图14 交互因素对合格指数影响的响应曲面
图14a为卸种正压为1.0 kPa时,排种转速和吸种负压交互作用的响应曲面。排种转速为16~24 r/min、吸种负压为1.7~2.3 kPa时,排种合格指数较高。吸种负压一定时,随着排种转速的增大,排种合格指数先上升后下降。排种转速一定时,随着吸种负压的增大,排种合格指数先上升后下降。排种转速为20 r/min、吸种负压为2 kPa时,合格指数最高。
图14b为吸种负压为2.0 kPa时,排种转速和卸种正压的交互作用的响应曲面。排种转速为 16~24 r/min、卸种正压为0.7~1.3 kPa时,排种合格指数较高。卸种正压一定时,随着排种转速的增大,排种合格指数先上升后下降。排种转速一定时,随着卸种正压的增大,排种合格指数先上升后下降。排种转速为20 r/min、卸种正压为1 kPa时,合格指数最高。
图14c为排种转速为20 r/min时,吸种负压和卸种正压的交互作用的响应曲面。吸种负压为1.7~2.3 kPa时,卸种正压为0.7~1.3 kPa时,排种合格指数较高。吸种负压一定时,随着卸种正压的增大,排种合格指数先上升后下降。卸种正压一定时,随着吸种负压的增大,排种合格指数先上升后下降。吸种负压为2.0 kPa时,卸种正压为1.0 kPa时,合格指数最高。
4.5 参数优化与验证试验
为寻求排种性能最优状态下的参数组合,以合格指数最大、重播与漏播指数最小为优化目标,对所建立的二次回归模型开展多因素优化求解,运用Design-Expert 10.0 的优化模块求解得:当排种转速为19.56 r/min、吸种负压为2.05 kPa、卸种正压为1.00 kPa时,排种性能达到最优,对应排种合格指数为90.92%,漏播指数为4.98%,重播指数为4.10%。模型求解出来的最优参数组合与零水平参数组合参数接近。为验证优化数据可靠性,根据试验参数控制条件,对求解的最优参数进行圆整,设定吸种负压为2.0 kPa、卸种正压为1.0 kPa、排种转速为20 r/min,重复进行3次台架试验,其平均值为合格指数91.48%、漏播指数4.28%、重播指数4.24%,试验结果与优化结果相近。
5 投种试验
根据投种环节力学分析及排种器吸种针运动轨迹分析可知,投种后种子在种床分布的株距均匀性主要与排种转速和卸种正压有关[18]。种子脱离排种器到落入种床土壤过程仅受惯性力、重力和正压力的作用,运动过程不受约束,属于无约束导种[8]。
为测试排种转速、卸种正压以及投种高度对株距均匀性的影响,通过在排种器下方设计接种土槽,模拟排种器田间投种状态开展投种试验,试验装置如图15所示,其中接种土槽由土槽台架、土槽同步带模组、土槽台架控制模块、土槽等组成;铺设土层厚度为50 mm,土壤为田间采集的细碎沙壤土,试验时土壤含水率为18.37%,投种试验设计投种高度100、200、300 mm,通过改变排种器在土槽台架上方的垂直高度来改变投种高度。
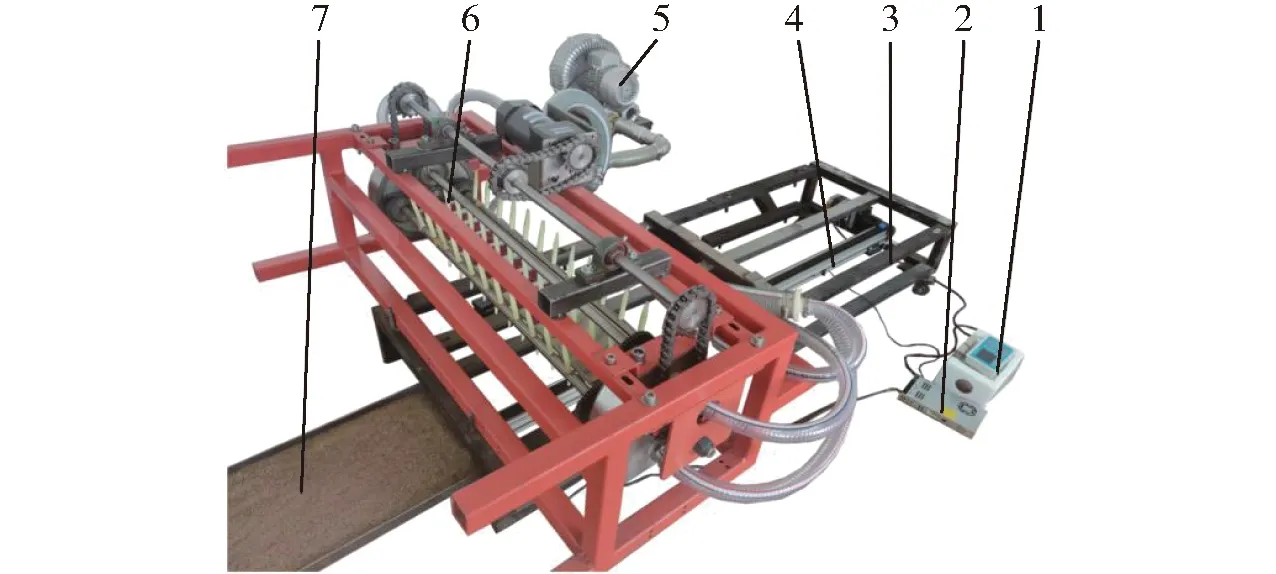
图15 投种试验装置实物图
为明确投种高度的影响,选取排种性能试验合格指数大于90%,漏播指数小于5%,重播指数小于5%的工作条件下的参数组合进行投种试验,根据前期正交试验,对所建立的二次回归模型开展多因素优化求解,其目标函数与约束条件为
(31)
求解得:在吸种负压为2.0 kPa、排种转速为18~22 r/min、卸种正压为0.8~1.2 kPa时,合格指数均大于90%,重播指数小于5%,漏播指数小于5%,投种试验在该工作条件下展开,参数如表4所示。
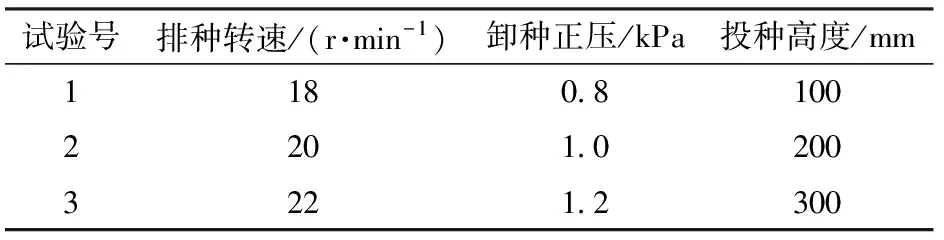
表4 试验参数
将不同排种转速代入式(16)、(17),得到试验台土槽前进速度分别为150、175、200 mm/s,可保证确定株距80 mm时轨迹的实现。试验参数如表4所示;根据GB/T 6973—2005《单粒(精密)播种机试验方法》要求,测定250个粒距,选取合格指数和粒距变异系数作为评价指标;每组试验重复3次,统计其平均值,结果如表5所示。
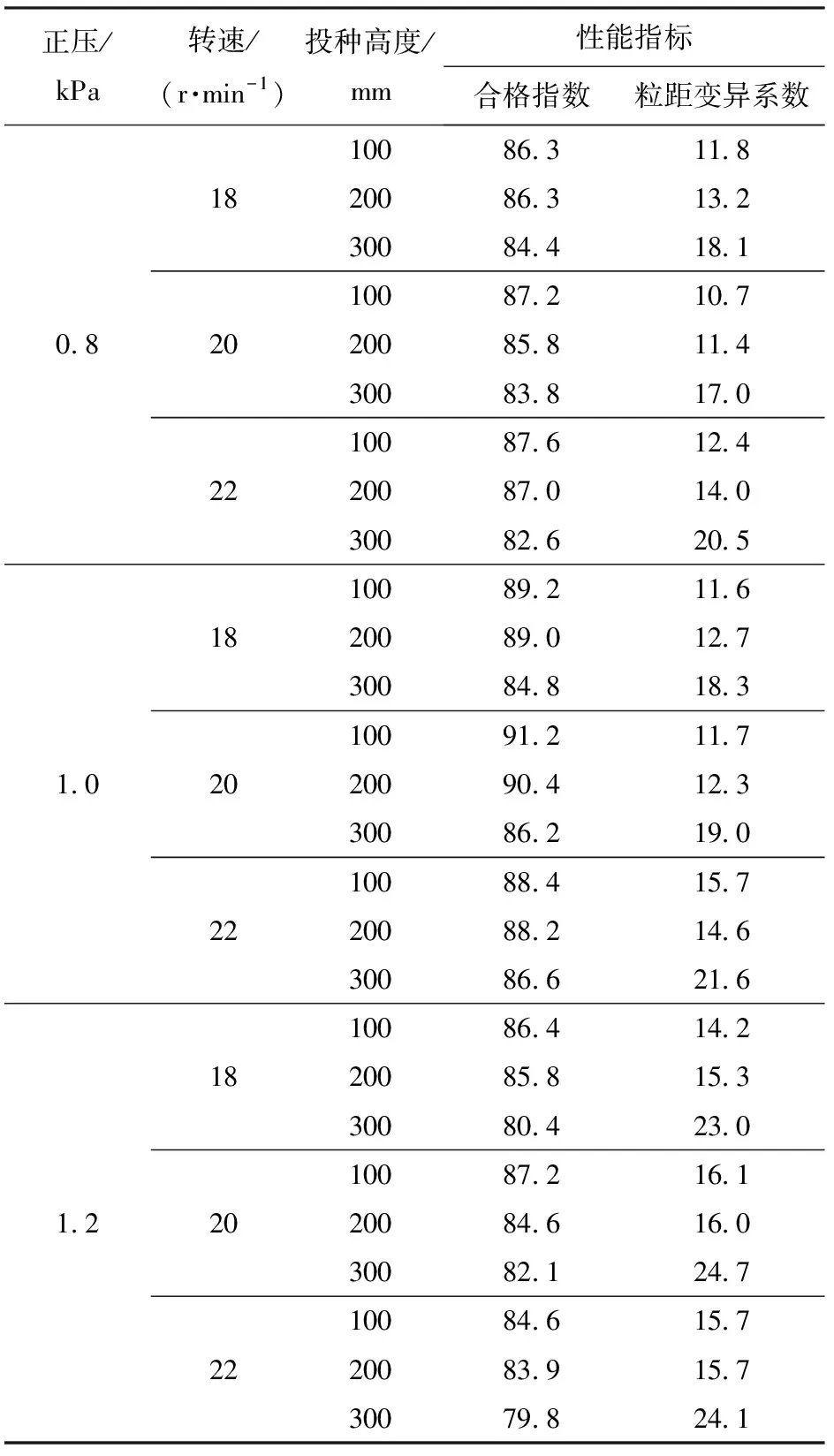
表5 投种试验结果
由表5可知,相同工作参数下,由种子流传感器检测的排种合格指数均高于90%,但投种后在种床土壤上测得的合格指数有所降低,投种高度越大,合格指数下降幅度越大,表明种子触地的随机碰撞改变了落种粒距间隔。在同一卸种正压下,投种高度从100 mm增至200 mm时,粒距变异系数变化幅度相对较小;当投种高度增加到300 mm时,落种粒距间隔变化较大,粒距变异系数增大至17.0%以上;在同一投种高度下,排种转速越大,粒距变异系数增加越大。在相同工作转速和投种高度条件下,以卸种正压1.0 kPa为中心,正压增大或减小时,粒距变异系数均增大,从1.0 kPa增至1.2 kPa时粒距变异系数变化比降至0.8 kPa时更明显。当投种正压0.8~1.0 kPa、工作转速18~20 r/min、投种高度小于200 mm时,粒距变异系数不大于13.2%,工作性能较优。
分析转速和正压因素造成粒距均匀性差的原因有:在正压增大时种子在下落过程中速度变大,种子弹跳现象明显,更易造成株距分布不均匀;转速和正压减小时吸种针卸种不及时,造成延迟投种现象,种子在下落过程中具有水平位移,粒距均匀性较差。分析投种高度因素造成粒距均匀性差的原因有:投种高度过高时,种子从投种口掉落到接触种床土壤的时间增大,增加了种子与种床碰撞弹跳滑移的概率,造成粒距变异系数变化明显。
结合投种环节力学分析和投种试验结果及分析可知,投种高度对粒距均匀性影响明显,随着投种高度的增大,粒距变异系数逐渐增大,投种高度小于200 mm时,粒距变异系数变化不明显;投种高度大于200 mm时,粒距变异系数显著增大。采用行星轮系与气流分配管结合的方式实现在排种器最低位投种,相比已有正负气压组合管针式集排器的水平位置投种[19],降低了投种高度,以提高粒距均匀性。
6 结论
(1)针对菠菜等小粒径蔬菜种子采用窄行密植、播种均匀性要求高,缺乏适用播种装备的问题,设计了一种气力针式行星轮系窄行密植多行并联低位投种精密排种器,通过行星轮系机构与气流分配管配合,改进吸种针运动轨迹,合理降低投种高度,以提高窄行密植单粒精密播种质量,适用于菠菜等小粒径蔬菜种子窄行精密播种。
(2)构建了吸种和投种环节力学模型,通过理论与ADAMS虚拟样机仿真分析了吸种针端点的相对运动轨迹和绝对运动轨迹,结合相对运动轨迹下的位移与速度曲线,明确了排种器在吸种区低速吸种和在投种区低位投种的过程,以及排种器实现低位零速投种条件,确定了排种器关键部件结构参数。
(3)采用二次回归正交旋转组合试验方法进行试验,并对试验结果进行方差分析,得出影响排种合格指数的主次顺序为排种转速、吸种负压和卸种正压。利用Design-Expert 10.0软件进行数据优化,得出最佳工作参数组合为:排种转速19.56 r/min、吸种负压2.05 kPa、卸种正压1.00 kPa,此时合格指数最大,重播与漏播指数最小。经台架试验验证,其性能指标为合格指数均值91.48%、重播指数均值4.24%、漏播指数均值4.28%,与优化结果基本一致。依据速比特征系数为1.53设置了投种试验,投种试验结果表明:当投种正压为0.8~1.0 kPa、工作转速18~20 r/min、投种高度小于200 mm时,粒距变异系数不大于13.2%,工作性能较优。
