真空管磁浮交通试验装置T 形槽轨平顺度测量方法
2022-12-05杨宝辉
杨宝辉
(自然资源部四川基础地理信息中心,四川 成都 610093)
1 研究背景及意义
近年来,随着真空管道磁浮交通理论技术的日渐完善、关键技术的不断突破和相关技术领域的快速发展,我国真空管道磁浮交通进入了实验验证阶段。为此,我国正在加快推进真空管道磁浮交通试验线的建设,为真空管道磁浮交通技术的理论验证、系统测试和工程化应用方案试验测试提供基础平台。而要使建设的试验线能满足真空管道磁浮交通进行超高速运行模拟实验的要求,则需使试验线管道及内部构件的安装达到高精度要求、轨道达到高平顺性要求。因此,在真空管道磁浮交通试验线的工程建设中,精密工程测量技术必然是关键技术之一。
2 主要研究内容及结构
基于我国首个真空管道磁浮交通试验线建设工程,对真空管道内T形槽轨平顺度检测方法进行研讨。该试验线为全长146 m 且两端可延伸的直线,由12 节内直径为4.2 m的圆形钢管拼接而成,管道内由底层到顶层依次安装T 形槽轨、直线电机和磁浮轨道,待其建设完成后将在其内进行真空管道磁浮列车高速运行模拟实验,该试验线建设具有以下难点:(1) 观测条件差。圆形管道内部空间狭小,加之管道内部设备和构件繁多,故观测条件差、控制点布设困难和施测难度大。(2) 测量精度要求高。该试验线建成后需将其内部抽成低真空状态,并在磁浮轨道上进行高速运行模拟实验,故对管道及内部构件的安装、测控和检测精度要求高,进而要求测量精度高。(3) 结构复杂且特殊。由于管道呈圆形结构,故在对其进行安装检测时难以布设测量定位点,同时精密安装测控难度大;管道内部设计了几种轨道,其结构特殊不同于市场上现有的轨道,故各类轨道的安装、检测和测控难度大。
为此,在管道内通视条件差和槽轨结构特殊的情况下,探讨槽轨平顺度测量方法及其精度分析。
3 磁浮电机T 形槽轨平面直线度与竖面平整度测量与分析
3.1 概述
T形槽轨(以下简称槽轨)是真空管道磁浮交通系统的重要组成部分,其安装在管道的最底部,是整个系统平台的基础。该试验线管道内共设计有5 条槽轨(T1~T5),各条槽轨在管道内的平面分布见图1。
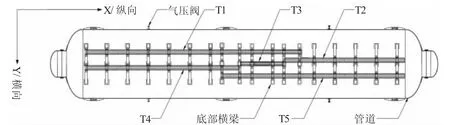
图1 管道内T 形槽轨位置分布平面示意图
T形槽轨是由横截面结构相同的小节特制轨道通过螺栓和压板固定在横梁上拼接而成的直线形轨道,结构尺寸见图2。
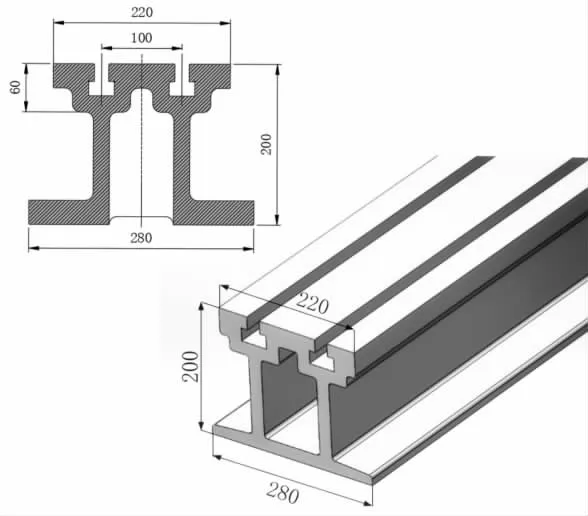
图2 T 形槽轨结构尺寸、横截面与三维立体示意图
前已述及,待该试验线建成后,将在管道内的磁浮轨道上进行试验车高速运行模拟试验。高速运行的磁浮试验车要求磁浮轨道具备良好的平顺性,而磁浮轨道是以安装在槽轨上的电机为基础进行铺设的[1],同时槽轨、电机和磁浮轨道三者之间需要通过构件上预先设计好位置的连接孔拼装成一个整体系统平台。因此,磁浮轨道的精密安装和良好平顺性的前提是要求电机能够进行精密安装,进而要求槽轨具备良好的平顺度。所谓槽轨平顺度指的是槽轨平面直线度和竖面平整度,即要求槽轨中心线上的各点在平面内是一条直线、在竖面内是等高的[2]。
在槽轨整体安装完成后,需要对各条槽轨的平顺度进行检测,以对其整体安装精度情况进行检测,从而为后续构件及设备的精密安装提供前提保障。根据设计要求,槽轨平顺度检测主要内容包括各条槽轨的平面直线度检测和竖面平整度检测,检测结果应满足设计的精度要求,单条槽轨平面直线度偏差≤4.0 mm;单条槽轨竖面平整度偏差≤2.5 mm。
结合管道内实际条件和槽轨结构,对槽轨平顺度检测方法和数据处理分析方法进行研讨,内容包括槽轨平顺度测量方法及其精度和槽轨平顺度测量数据处理分析,并将上述方法用于指导槽轨的平顺度测量,以验证本方法的可行性和正确性。
3.2 槽轨平顺度测量方法及其精度分析
3.2.1 槽轨平顺度测量方法 针对管道内通视条件差、传统平顺度测量方法难以满足该试验线工程建设实际要求和槽轨结构特殊等问题,本研究提出基于三维控制网的自由设站极坐标测量法进行槽轨平顺度测量,即依据管道内已经建立的三维控制网,采用自由设站测量与极坐标测量相结合的方法对槽轨上测量装置棱镜中心进行三维坐标测量,从而实现槽轨平顺度测量,见图3,具体步骤如下。

图3 自由设站极坐标测量法进行槽轨平顺度测量原理示意图
(1) 自由设站测量。依据建立的高精度三维控制网采用智能型全站仪进行自由设站测量。自由设站测量精度要求参考《高速铁路工程测量规范》[3],要求如下:X坐标中误差≤0.7 mm;Y坐标中误差≤0.7 mm;Z坐标中误差≤0.7 mm;定向角中误差≤2"。(2) 极坐标测量。若自由设站测量精度满足要求,则采用极坐标测量法对槽轨上各测点进行三维坐标测量,待某测点测量完成后将测量装置移动至下一个测点,依此类推完成各条槽轨的平顺度测量。
极坐标测量法原理如下。
若不考虑控制网原始数据误差的影响,则由自由设站极坐标测量法的几何模型,可得测量装置棱镜中心的三维坐标(X,Y,Z)计算式为[4]
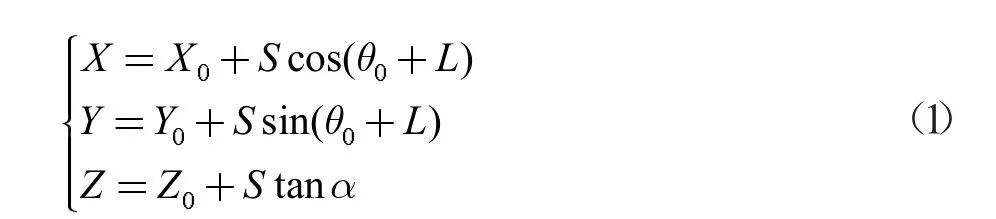
式中,(X0,Y0,Z0)为全站仪自由设站测量后的站心三维坐标,θ0为定向角,S、L 和α 分别为全站仪观测的水平距离、水平方向和竖直角。
由以上测量方法,即可测得各条槽轨上各测点的三维坐标,从而为槽轨平顺度数据处理、分析与精调提供基础数据。
3.2.2 自由设站极坐标测量法三维坐标测量精度分析槽轨上各测点三维坐标的精度直接影响着后续数据处理分析的结果及其精度。因此,进一步对自由设站极坐标测量法三维坐标测量的精度情况进行讨论分析。首先,对自由设站极坐标测量法观测点的误差模型进行推导;然后,依据上述误差模型对自由设站极坐标测量法观测点的测量精度进行估算,并对其结果进行讨论分析。
(1) 自由设站极坐标测量法观测点的误差模型推导。将式(1)进行全微分且线性化可得

将式(1)代入式(2)可得

进一步由误差传播定律可得测量装置棱镜中心三维坐标各分量的中误差mX、mY,mZ为

式中,MX0,mY0,mZ0,mθ0分别为全站仪自由设站点三维坐标中误差和定向角中误差,ms,mL,mα分别为全站仪水平距离测量中误差、水平方向测量中误差和竖直角测量中误差。
由式(4),可得全站仪自由设站极坐标测量法测量槽轨上测点的平面点位中误差和高程中误差计算式

(2) 自由设站极坐标测量法测量精度估算及讨论分析。由式(4)可知,要对自由设站极坐标测量法三维坐标测量精度进行估算,则需要得到全站仪测距精度、水平方向观测精度、竖直角观测精度。其中,全站仪测距精度和水平方向观测精度可由全站仪的标称精度计算得出。由于在槽轨平顺度测量的过程中竖直角较小,且智能型全站仪稳定性高,故可将水平角的测量中误差近似作为竖直角测量中误差[5]。
若采用智能型全站仪TS60,其方向测量和测距标称精度分别为0.5"、1+1ppm,且设观测竖直角α=15°、同一自由设站最大观测距离为80 m、自由设站测量精度参考《高速铁路工程测量规范》[3]取mX0=mY0=mZ0=0.7mm、mθ0=2",则由式(5)计算得智能型全站仪自由设站极坐标测量法测量槽轨上测点的平面点位中误差和高程中误差,结果见表1。

表1 自由设站极坐标测量法测量精度估算结果
为进一步分析自由设站极坐标测量法测量槽轨上测点的平面点位精度随距离S 的变化情况,故将上述式(5)中的距离S 取值为St(St=1,2,3…80),其余参数取值不变,并依据式(5)依次计算出St值时对应的平面点位中误差,结果见图4。
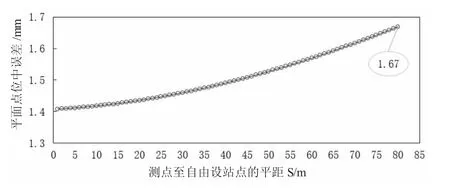
图4 自由设站极坐标测量法平面测量点位中误差随距离的变化曲线
结合式(5)、表1 和图4 分析可知,当采用TS60 全站仪进行自由设站极坐标测量时,在自由设站测量精度满足《高速铁路工程测量规范》[3]中的精度要求、观测竖直角不大于15°和同一自由设站内观测距离不超过80 m的情况下,自由设站极坐标测量法平面测量点位中误差随距离增大而增大,测点的平面点位中误差不超过1.67 mm。另外,高程测量中误差不超过0.81 mm,即Z坐标测量中误差不超过0.81 mm。
以下,也对自由设站极坐标测量法测点的高程精度随距离S 的变化情况进行分析。若全站仪标称精度为0.5"、1+1ppm,mX0=mY0=mZ0=0.7mm、mθ0=2",此时式(5)存在距离和竖直角两个变量。在实际测量中,竖直角可由自由设站点与测点之间的高差和平距之间的三角函数关系求出,此外在槽轨平顺度实际测量过程中,由于整条槽轨的轨顶高程相差不大,因此可假设同一自由设站内自由设站点与槽轨顶面的高差大小不变。若假设同一自由设站内自由设站点与槽轨顶面的高差为1 m,则该测站内各测点的竖直角数值可表达为|αt|=|arctan(1/St)|,此时结合式(5)可将高程测量中误差表达为以S 为变量的函数,则将S 取值为St(St=1,2,3…80),并依据式(5)依次计算出St值时对应的自由设站极坐标测量法高程测量中误差,结果见图5。

图5 自由设站极坐标测量法高程测量中误差随距离的变化曲线
结合式(5)和图5 分析可知,在同一自由设站内,当观测距离小于5 m时,高程测量中误差变化明显,即高程测量精度不稳定;当观测距离在5~80 m 之间,高程测量中误差变化较小,即高程测量精度稳定;因此,在槽轨平顺度实际测量中,本研究建议同一自由设站内观测距离在5~80 m 为宜,此时高程测量中误差不超过0.75 mm。
综上所述,若采用智能型全站仪(TS60)自由设站极坐标测量法进行槽轨上各测点的三维坐标测量时,在自由设站测量精度满足精度要求、同一自由设站内观测距离不超过80 m的情况下,对于平面测量精度而言:平面点位中误差随距离的增大而呈增大趋势,但其数值变化不大,测点的平面点位中误差不超过1.67 mm;对于高程测量精度而言:(1) 若取竖直角为15°时,则高程测量中误差不超过0.81 mm;(2) 若依据槽轨平顺度测量实际情况,将竖直角以自由设站点与槽轨轨顶面之间的高差和平距进行表达,且假设自由设站点与槽轨轨顶面之间的高差为1 m时,则同一测站内当观测距离在5~80 m时,测点的高程测量精度稳定,且高程测量中误差不超过0.75 mm。
4 结论
主要对真空管道磁浮交通试验线T 行槽轨平顺度检测方法进行了研讨。针对管道内通视条件差、传统平顺度测量方法难以实施和槽轨结构特殊等问题,本研究提出了基于三维控制网的自由设站极坐标测量法,并对其三维坐标测量精度进行了讨论分析,利用槽轨平顺度检测配套的测量装置,实现了槽轨上各测点三维坐标的测量,从而为槽轨平顺度数据处理提供了基础数据,通过分析这些基础数据,证明本文提出的基于三维控制网自由设站极坐标测量法和运用的数据处理分析方法,适用于槽轨平顺度检测且实际可行和正确可靠。
