四旋翼无人机自主降落系统
2022-12-05郭嘉辰朱文秀白朋飞王天淼吴小凤宁江峰
郭嘉辰,朱文秀,白朋飞,王天淼,吴小凤,宁江峰
(1. 吉林化工学院 信息与控制工程学院,吉林 吉林 132022;2.东北电力大学 自动化工程学院,吉林 吉林 132011)
近年来,随着计算机技术的飞速发展,旋翼无人机行业也获得了飞速的发展,逐渐应用在多个行业之中,如航拍、农业植保、电力巡检、影视拍摄、灾后搜救等[1-2]。旋翼无人机可以轻松的做到一些人们不容易做到的事情,合理地运用旋翼无人机可以提高劳动生产率,降低人们的劳动强度。随着旋翼无人机应用领域的增加,旋翼无人机自主降落精度较低的问题也逐渐暴露出来[3]。在经典的无人机控制系统中,降落时是以GPS 为基础对无人机的位置进行定位,但由于GPS 信号会受到自身精度以及信号强度的影响,系统降落时只能降落到以标定点为圆心,半径为一米左右的圆内,在很多场景中这些偏差都无法忽视,甚至会成为无人机降落的重大隐患。提高旋翼无人机自主降落的降落精度可以保障旋翼无人机的安全回收和循环作业,同时也让旋翼无人机在降落环境严苛的场合中可以得以应用[4]。
主要研究了四旋翼无人机自主降落的问题。针对以上问题,设计了一种以STM32 单片机和树莓派为核心的四旋翼无人机自主降落系统。全文主要包括四旋翼无人机结构及原理、系统硬件设计和系统软件设计3 部分。
1 四旋翼无人机结构及原理
1.1 四旋翼无人机结构
四旋翼无人机一般有十字型和X 字型2 种结构[5]。其中,十字型无人机的机头方向与无人机某条机臂的方向相同,X 型无人机的机头方向朝向两条机臂的中线方向相同[6]。本设计将以X 型无人机为实验平台进行测试实验。
X 型无人机结构示意图见图1,采用正反转电机以及正反桨叶的设计来解决四旋翼无人机的陀螺效应。不同对角线上的电机旋转方向相反,且按照电机旋转方向,桨叶分为正反桨[7]。其中电机0、2 为顺时针旋转,桨叶为正桨,电机1、3 为逆时针旋转,桨叶为反桨。以此保证四旋翼无人机可以平稳飞行。

图1 四旋翼结构示意图
1.2 四旋翼无人机控制原理
四旋翼无人机的基本运动方式可分为俯仰、翻滚、偏航、垂直、横向5 种[8],通过控制4 个电机的转速,可以对四旋翼无人机的姿态和运动轨迹进行控制。
1.2.1 俯仰运动
提高(降低)电机0、3 的转速,同时降低(提高)电机1、2 的转速,可以改变无人机的俯仰姿态。
1.2.2 翻滚运动提高(降低)电机0、1 的转速,同时降低(提高)电机2、3 的转速,可以改变无人机的翻滚姿态。
1.2.3 偏航运动
提高(降低)电机0、2 的转速,同时降低(提高)电机1、3 的转速,可顺时针(逆时针)调整四旋翼无人机的偏航姿态。
1.2.4 垂直运动
四旋翼无人机的上升或者下降运动取决于4 个桨的升力和与机身重力的关系。因此,同时增大或减小四个电机的转速,可以让无人机进行垂直运动。
1.2.5 横向运动
四旋翼无人机的横向运动是通过对姿态的改变来实现的。因此,通过控制无人机的姿态角角度可实现横向运动。
2 系统硬件设计
2.1 硬件系统结构
本系统采用STM32 处理器和树莓派作为系统整体的控制核心,机载摄像头与树莓派相连接,激光传感器和姿态传感器与STM32 相连接,STM32 发出的控制信号通过控制电路对电机转速进行调节。控制系统结构见图2。

图2 控制系统结构
系统通过姿态传感器、激光传感器和机载摄像头测出系统的姿态、高度和位置,并将数据传入STM32中,控制器根据测量的数据和期望的姿态、位置数值计算出电机的控制信号,并根据控制信号,调节四个电机的转速,从而调整系统姿态、位置的目的。此外,通过树莓派向STM32 发送控制命令可以控制系统的启动停止,并且可以将系统的数据可视化。
2.2 核心控制模块
系统的核心控制器是由STM32 单片机、树莓派和控制底板组成,控制底板将单片机和树莓派连接起来,并提供所需要的I/O 引脚。核心控制器部分见图3。

图3 核心控制器
2.3 姿态传感器模块
JY901 是一个姿态倾角传感器模块,可以实时测量芯片的状态。模块将测量好的姿态角提供给单片机,单片机根据所测量的实际角度改变系统四个旋翼的转速,从而使系统稳定。
2.4 激光传感器模块
采用TFmini 激光传感器测量四旋翼系统的实际高度。系统接收到激光传感器测量的实际高度后会将实际高度与系统设定的期望高度相比较,再根据二者的差值来改变电机转速,达到调整系统高度的目的。
2.5 摄像头模块
系统采用IMX415 机载摄像头寻找目标标志,根据目标标志在摄像头视野中的位置确定系统与目标标志的相对偏差,系统根据所测量到的偏差值实时调整机身的位置,达到提高降落精度的目的。
3 系统软件设计
系统软件程序部分主要包括系统飞行控制、自主降落策略和人机交互3 部分。下面对这3 部分进行详细介绍。
3.1 飞行控制程序
四旋翼无人机在正常飞行时,需要时刻调整系统的姿态角(即俯仰角、翻滚角和偏航角)、系统高度和系统水平位置[9-10]。首先需要时刻保证系统的姿态角平稳,在姿态角稳定的前提下对系统的高度进行调整,使系统稳定在期望高度,待高度稳定后,再对系统的横向位置进行控制,让系统可以在期望高度进行横向移动。飞行控制流程见图4。

图4 飞行控制流程
3.2 自主降落策略
系统的降落需要使用机载摄像头对目标标志进行捕捉,捕捉到目标标志之后计算系统与目标标志的相对偏差,同时调整系统自身位置,当系统调整到与目标标志的偏差值在允许范围之内时进行降落并实时判断是否需要调整机身位置。机载摄像头识别目标标志见图5。

图5 机载摄像头识别目标标志
无人机在到达指定降落地点时会巡航飞行并开始捕捉目标标志,捕捉到目标后会调整无人机位置并进行降落,在降落过程中实时对集体位置进行调整,在降落到指定高度后结束飞行。系统自主降落流程见图6。
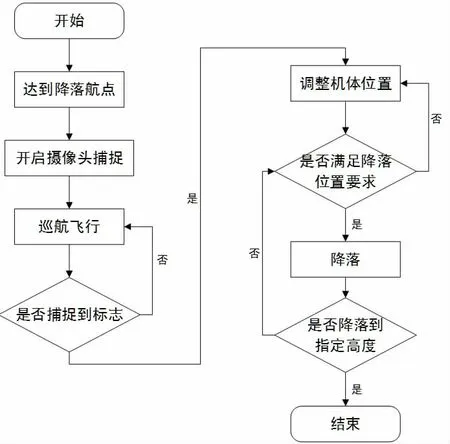
图6 系统自主降落流程
3.3 人机交互
系统中的人机交互部分以树莓派为核心,使用Qt软件编写操作界面,在操作界面上实现手动启停、数据监测、数据记录和参数调整的功能,方便操作人员把握系统的实时状态。
4 结论
在四旋翼无人机逐步应用于各个领域的大环境下,需要更精准、可靠的自主降落系统,以便提高四旋翼无人机在使用时的可靠性和安全性。本设计以STM32 单片机和树莓派为核心,提出了一种自主降落系统。通过树莓派与地面站可以实现远程控制。系统中STM32 单片机留有预留接口,方便后续增加额外功能。该系统性能稳定、成本较低、操作简便,可以有效的增加四旋翼无人机的使用效率,有重要的经济意义和现实意义。
