浮动桥逆变器控制的单位功率因数空心杯感应电机
2022-11-18彭理森
彭理森,张 波
(华南理工大学 电力学院,广州 510641)
0 引 言
空心杯感应电机可看作实心转子感应电机的一种变形:把实心转子的导电铜层和铁心分离,导电铜层形成空心杯转子,铁心不再随空心杯转子一同旋转,而是固定下来形成内定子铁心,其结构示意图如图1所示[1]。空心杯转子上无铁心,转子质量轻,转动惯量小;空心杯转子由整块金属铸造而成,减小了制造缺陷和机械振动的可能性;空心杯转子还可以和传动对象一体化制造,简化加工装配过程,进一步增强电力传动系统的可靠性[2]。因此,空心杯感应电机结构简单,机械强度高,适用于涡轮分子泵、高速车床、家用电器等高速领域[3]。
但空心杯感应电机为转子无铁心结构,且存在内外双气隙,有效气隙长度较大,功率因数和输出功率均比较低。文献[4-5]对空心杯感应电机的内外气隙长度及转子材料进行优化,但所设计样机功率因数不超过0.6。高速领域常采用逆变器作为电机驱动,直流母线电压固定,过低的功率因数会进一步降低空心杯感应电机的输出功率[6]。因此,空心杯感应电机虽然机械性能优良,但在高速领域的应用现状不如笼型高速感应电机。对空心杯感应电机进行功率因数补偿,提高输出功率,有利于发挥空心杯转子结构优势,推动其在高速领域的应用。
目前,基于浮动桥逆变器的双逆变器拓扑已运用到笼型感应电机以及永磁直线电机上,可实现单位功率因数补偿,提高电机的输出功率范围[8-10]。同时,浮动桥逆变器无需两套电源,节省了系统成本与体积,且取消了零序电流,对于空心杯感应电机这种大气隙电机是一种较好的功率因数补偿策略。本文从T型等效电路出发,介绍了空心杯感应电机功率因数补偿机理及其对工作特性的影响,给出了浮动桥逆变器的单位功率因数补偿控制策略,最后在ANSYS电磁仿真软件中搭建了空心杯感应电机模型,使用场路耦合仿真验证了该方法的有效性。
1 功率因数补偿机理
图2为本文空心杯感应电机系统拓扑结构。空心杯感应电机定子绕组为开绕组结构,一端接电源逆变器,另一端接浮动桥逆变器。浮动桥逆变器的特点在于其母线电容电压Vdc不与直流电源Vs相连接,两个逆变器的母线电压彼此独立。在稳态时,浮动桥逆变器输出电压相位滞后定子电流90°,其只发出无功功率,与电源逆变器以及空心杯感应电机之间不存在有功功率交互,故其直流母线电压维持稳定。通过控制浮动桥逆变器输出电压幅值大小可对电源逆变器进行功率因数补偿调节。
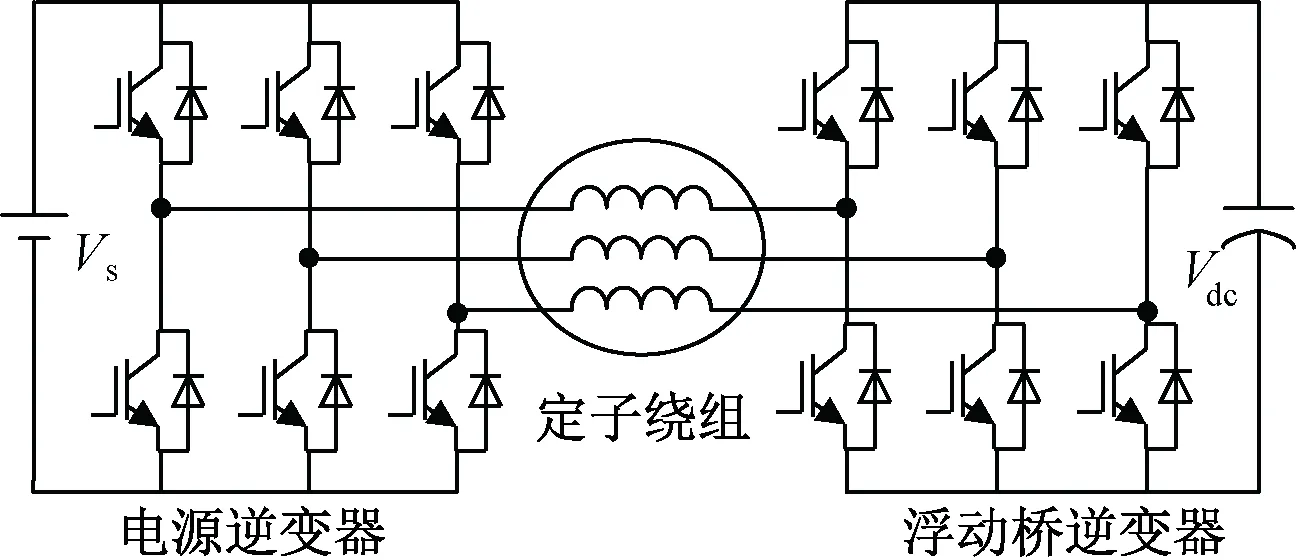
图2 空心杯感应电机系统拓扑结构
将浮动桥逆变器等效为可调无功补偿电容,电机系统T型等效电路如图3所示。图3中,Us为电源逆变器输出相电压相量,I1、I′2分别为定、转子相电流相量,R1、R′2分别为定、转子绕组电阻,X1、X′2分别为定、转子绕组漏抗,Xm为励磁电抗,XC为可调无功补偿电容容抗。

图3 T型等效电路模型
单位功率因数补偿下,记XC的值为XC0。由T型等效电路模型可求得XC0表达式:
(1)
空心杯感应电机气隙较大,耦合系数比较低。以0.8的耦合系数为例,T型等效电路参数选择:R1=0.38 Ω,R′2=0.32 Ω,X1=12.74 Ω,X′2=12.74 Ω,Xm=10.05 Ω。电机系统相量图如图4所示,α为电机本体功率因数角,β为电源逆变器功率因数角,虚线轨迹代表电源逆变器的最大输出电压,其受直流母线电压Vs限制。电机输入电压Uin为电源逆变器输出电压Us与浮动桥逆变器输出电压U之差,其中,U=-jXCI1。

图4 电机系统相量图
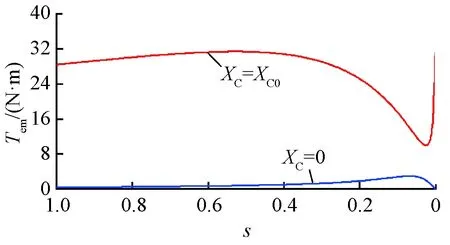
图5 电磁转矩-转差率曲线

图6 电源逆变器功率因数-转差率曲线
2 浮动桥逆变器控制

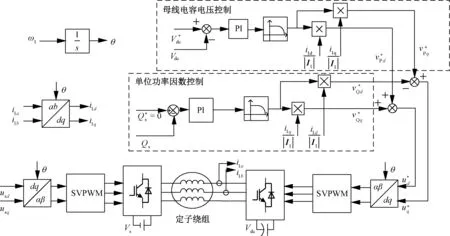
图7 电机系统控制框图
Qs=i1dusq-i1qusd
(2)

(3)
(4)
3 验 证
在ANSYS有限元仿真软件中搭建验证平台,主要包括三部分:空心杯感应电机模型、功率电路模型以及控制回路模型。空心杯感应电机参数取自文献[4]所设计的样机参数,在ANSYS Maxwell软件中重建电机模型如图8(a)所示,尺寸参数如表1所示[4]。
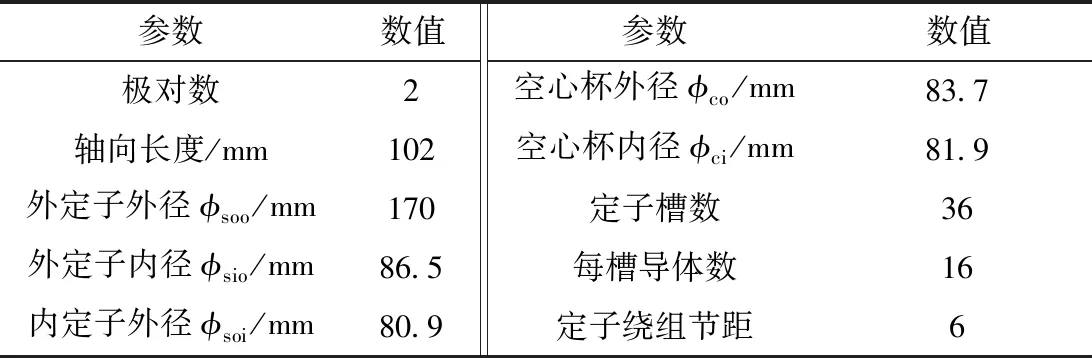
表1 电机模型尺寸参数

固定转子转速,在浮动桥逆变器进入稳态后,以300 r/min为步长,分别记录4 000 r/min~5 500 r/min下空心杯感应电机的电磁转矩Tem以及电源逆变器的功率因数cosβ,仿真结果如图9和图10所示。

图8 仿真模型

图9 电磁转矩-转速曲线

图10 电源逆变器功率因数-转速曲线
在XC=0,即无浮动桥逆变器进行无功补偿时,电源逆变器的功率因数cosβ等于空心杯感应电机的功率因数cosα。可以看到,cosα不超过0.6,过低的功率因数是由空心杯感应电机的双气隙结构决定的。在XC=XC0,即浮动桥逆变器实现单位功率因数补偿时,电磁转矩Tem、功率因数cosβ-转速曲线趋势与等效电路模型所推导的一致,证明了浮动桥逆变器可以改善电源逆变器的功率因数以及增大空心杯感应电机的输出功率。

图11 电机从起动到稳态的仿真波形
图11给出了空心杯感应电机从起动到转速稳定的仿真波形。起动时,浮动桥逆变器的母线电容电压Vdc为0,电源逆变器输出的大部分有功功率通过定子绕组给母线电容充电,母线电容电压Vdc逐渐上升。空心杯感应电机输送到转子侧的电磁功率较小,电磁转矩较低,电机在负载转矩带动下反转。当母线电容电压Vdc逐渐上升,至满足条件式(4)时,浮动桥逆变器足够补偿空心杯感应电机所需无功,电源逆变器的功率因数cosβ逐渐上升,电机的电磁转矩增大,转速升高。可以看到,电磁转矩的上升趋势和电源逆变器的功率因数cosβ上升趋势是一致的。此后,电源逆变器一直工作于单位功率因数下。
4 结 语
本文将浮动桥逆变器应用于空心杯感应电机系统,实现了电源逆变器单位功率因数补偿,仿真结果证明了该方法的有效性。该方法弥补了空心杯感应电机功率因数低和输出功率低的缺点,有利于改善其在高速领域的应用现状。
