基于递归神经网络的超声波电机力矩迟滞辨识
2022-11-18傅平
傅 平
(1.闽江学院 物理学与电子信息工程学院,福州 350121;2.闽江学院 福建省教育厅先进运动控制重点实验室,福州 350121)
0 引 言
超声波电机[1-3]是利用压电材料具有的逆压电效应,并利用谐振将电能转变成机械振动能,再通过摩擦转变成旋转或其它方式运动的驱动装置。与传统的电磁型电机相比,它没有绕组和磁性材料,具有结构简单、质量轻、低速大力矩、响应速度快(几毫秒以内)、控制精度高和电磁兼容性好等优点。在非连续运动领域及精密控制领域,超声波电机要比电磁型电机优越得多。
想要充分发挥超声波电机精度高和直接驱动的特点,就必须对其进行精确控制。超声波电机是一个机电耦合的非线性系统,影响电机力矩输出的变量较多,如电机输入电压、相位差、频率、负载等,而这些变量与输出之间是强非线性关系,给精确控制造成了一定困难。对于超声波电机的时变、强非线性特性,其数学解析模型难以得到解析解且建模难度较大。虽然现在已有一些不使用数学解析模型的控制方法,如负载自适应[4]、模糊控制[5]、模型参考自适应[6]、滑模控制[7]、模糊神经网络[8-9]等,但是这些控制方法运算量较大,实时控制时需要处理大量数据,使得控制系统变得复杂。此外,超声波电机的定子使用压电材料,定子压电迟滞通过定转子之间的摩擦层耦合到转子,这也使得电机的速度和输出力矩存在迟滞[10]。近年来,压电作动器(包括超声波电机)的迟滞非线性建模及控制器设计[11-14]是一个热门领域。现有针对压电驱动平台有许多迟滞非线性建模的方法,但是超声波电机输出力矩迟滞的建模涉及较少,主要是由于压电平台的输出量可以通过传感器进行测量,超声波电机可以直接测量的机械量为速度、力矩等,而定子迟滞不易测量。为了发挥超声波电机高精度特点,必须对速度进行精确控制。当电机进行速度跟踪时,其速度-力矩之间的迟滞关系是本文研究的重点。
本文提出使用递归神经网络辨识器(以下简称RNNI),利用李雅普诺夫稳定性方法进行RNNI的参数调整,对超声波电机速度-力矩迟滞特性进行辨识,其辨识算法可以反映电机的速度-力矩迟滞非线性特性。首先介绍超声波电机的迟滞特性及相关的测控系统,然后给出RNNI的辨识算法,最后根据本文辨识算法得到相关的实验结果并验证该算法的有效性。
1 超声波电机的迟滞特性
超声波电机驱动电路采用基于LCC谐振的电路[15],如图1所示,整个电路由半桥电路和二相LCC驱动电路组成。外部控制器与相应的驱动电路产生开关元件SW1~SW4以及SW11、SW12所需的驱动信号。

图1 二相半桥式LCC驱动电路
本文所用的超声波电机工作频率为41.5~44 kHz。通过调整二相LCC驱动电路的驱动频率、相位差以及电压幅度可以调节电机的速度,其中测控系统使用灵奇创思控制卡完成电机速度和力矩数据的采集。电机测试系统的框图如图2所示。

图2 电机测试系统框图
超声波电机的控制变量主要有电压、驱动频率和相位差。由文献[4-9,11-14] 可以知道,电机的频率-速度特性与相位差-速度特性均为非线性,但是对力矩-速度的迟滞特性未进行描述。利用基于半实物仿真的电机测试系统,当电机跟踪给定速度y=70+20sin(2πft) (f=1.2 Hz),负载为0.126 N·m,并使用PI控制器调节频率和相位差控制速度,得到电机速度随时间变化的特性如图3(a)所示,对应的频率-速度特性如图3(b)所示,速度-力矩特性如图3(c)所示。由图3可知,电机的速度-力矩特性存在迟滞,频率-速度特性也存在迟滞,且图3(c)的光滑性较图3(b)差。

图3 速度y=70+20sin(2πft)时的特性曲线
为了验证不同速度和不同给定曲线下也存在频率-速度和速度-力矩迟滞,我们改变跟踪速度范围和跟踪曲线类型进行上述类似实验。当电机跟踪给定三角波速度,其速度区间设为50~90 r/min,三角波的频率为1.1 Hz,负载为0.126 N·m,使用PI控制器控制速度,得到电机速度随时间变化的特性如图4(a)所示,其对应的频率-速度特性如图4(b)所示,速度-力矩特性如图4(c)所示。由图4可知,电机的速度-力矩迟滞特性较为明显,频率-速度虽然也呈现迟滞特性,但是迟滞特性边缘波动较大且光滑性较差。

图4 速度三角波50~90 r/min时的特性曲线
改变跟踪三角波速度的范围,设为30~80 r/min,三角波的频率为1.2 Hz,负载为0.126 N·m,与前面实验方法类同,得到电机速度随时间变化的特性如图5(a)所示,其对应的频率-速度特性如图5(b)所示,速度-力矩特性如图5(c)所示。虽然跟踪给定的速度区间不同,但图5(c)的速度-力矩也存在迟滞。频率-速度也呈现迟滞,由图4(b)与图5(b)对比可知,迟滞边缘波动都比较大,说明其非线性比较严重。从辨识的角度来说,速度-力矩特性相对光滑使其更易于辨识。

图5 速度三角波30~80 r/min时的特性曲线
在固定负载情况下改变速度跟踪范围重复上述实验,可初步研究速度-力矩迟滞的变化情况。实验时负载固定为0.12 N·m,给定速度频率f为1.5 Hz,改变给定速度分别为:y=80+20sin(2πft),y=80+28sin(2πft),y=80+10sin(2πft),测试结果如图6所示。从图6中可以看出,当速度变化范围变大时,迟滞范围也相应变大,但不是按照比例变化,有较强的非线性。速度变化区间缩小时,迟滞也相应缩小,但迟滞缩小的幅度较大,呈现明显的非线性。

图6 速度改变后的迟滞变化情况
通过改变频率可以测试频率-速度迟滞的变化情况。实验时电机驱动频率设定为42 000+1 500×sin(2πft),其频率f为1.2 Hz,测试结果如图7、图8所示。频率设定值随时间变化如图7(a)所示,无负载时电机的速度特性如图7(b)所示,从图7(b)中可以看出,随着时间增加,电机谐振频率发生漂移,使得电机速度下降,这与文献[2-3]相吻合,其对应的频率-速度特性如图7(c)所示,由图7(c)可知,频率-速度呈现迟滞。电机驱动频率不变情况下带负载0.12 N·m重复上述实验,有负载时电机的速度特性如图8(a)所示,与7(b)类似,同样存在频率漂移现象,其对应的频率-速度特性如图8(b)所示,速度-力矩特性如图8(c)所示,频率-力矩特性如图8(d)所示。由于只控制驱动频率未对速度进行控制,同样频率下速度值随着时间增加会发生漂移,当负载变化时速度值也不同,因此只控制电机驱动频率而不对速度控制时,由于电机的频率漂移,其速度-频率、频率-力矩、速度-力矩特性产生偏差,导致迟滞也发生变化。

图7 无负载时频率跟踪特性曲线
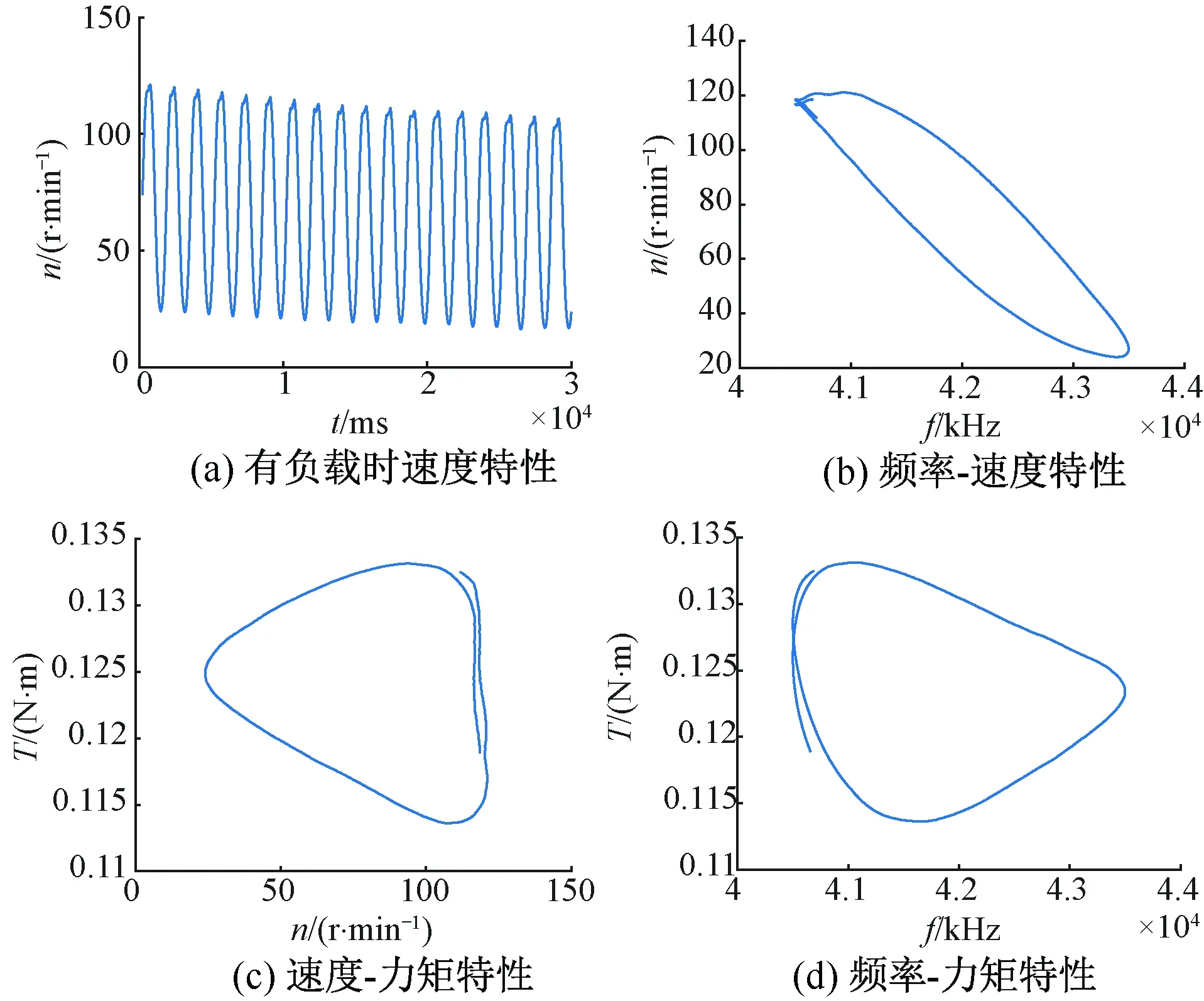
图8 有负载时频率跟踪特性曲线
综上所述,在测试力矩-频率、力矩-速度等特性时需要对电机的速度进行控制,频率是控制速度的一个变量。由实验结果可知,当使用频率调节时,其频率-速度特性边缘波动较大,导致辨识的准确性下降。本文使用电机速度调节时输出力矩和速度之间的迟滞,同样可以反映定子迟滞对电机输出力矩的影响。
2 递归神经网络的辨识算法
为了减小迟滞对电机控制系统的影响,需要先对迟滞进行辨识。本文引入递归神经网络(以下简称RNN)对其进行辨识,如图9所示。RNNI完成对超声波电机力矩-速度迟滞非线性的辨识。
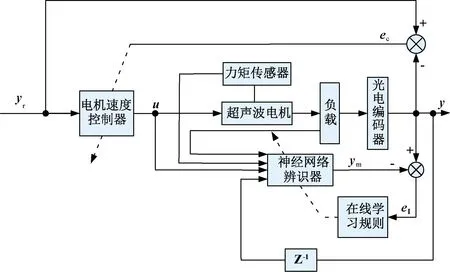
图9 RNN辨识系统结构图
RNNI由三层网络组成,分别是输入层、隐含层和输出层,如图10所示。辨识器输入信号为k-1时刻电机的速度信号和负载信号,通过神经网络辨识得到下一时刻电机的输出力矩,并与电机的实测数据进行比较,通过调整神经网络内部权重值,从而达到较好的辨识效果。

图10 RNNI结构图
(1)输入层
(1)
式中:x1(k)为k-1时刻电机的速度检测信号;x2(k)为k-1时刻电机的负载信号。
(2)
(2)隐含层
j=1,…,20
(3)

(4)
(3)输出层
(5)
RNNI的输出ym(k)=[ym1(k)ym2(k)]T,其中ym1(k)为k时刻辨识模型的力矩值;ym2(k)为k时刻辨识模型的速度值。
(6)
定义RNNI的误差函数EI(k):
(7)

(8)
(9)
(10)


(11)
(12)
(13)
其中:

(14)

(15)
取离散型Lyapunov函数VI(k):
(16)
同理可以证明,只要保证:
(17)
(18)
(19)
(20)

3 实验及结果分析
基于半实物仿真的超声波电机测控系统包括硬件平台和软件平台,其中硬件平台由仿真机系统和电机对拖平台两部分组成。仿真机包括机箱、CPU、板卡等,板卡主要实现AD、DA、PWM发生和脉冲计数等功能,完成测控过程的输入输出数据采集和转换。电机对拖平台如图11所示,平台由光电编码器、被测电机、力矩传感器、负载电机四部分组成。图10中,①为光电编码器;②为被测的超声波电机;③为力矩传感器;④为负载电机。我们搭建的半实物仿真平台使用量程为2 N·m的电机力矩传感器ZJ-2AM进行力矩测量,分辨率为3‰,可以满足力矩动态性能测控的要求。位置检测采用分辨率为10 000脉冲/转的光电编码器,可以实现电机速度的测量。超声波电机的型号为USR-60,其额定力矩为0.5 N·m,堵转力矩为1 N·m。负载电机型号为60LCB040C-J43A16,可通过输入电压控制输出力矩,其输出的最大力矩为1.27 N·m。整个测控系统的数据采样频率为1 kHz。
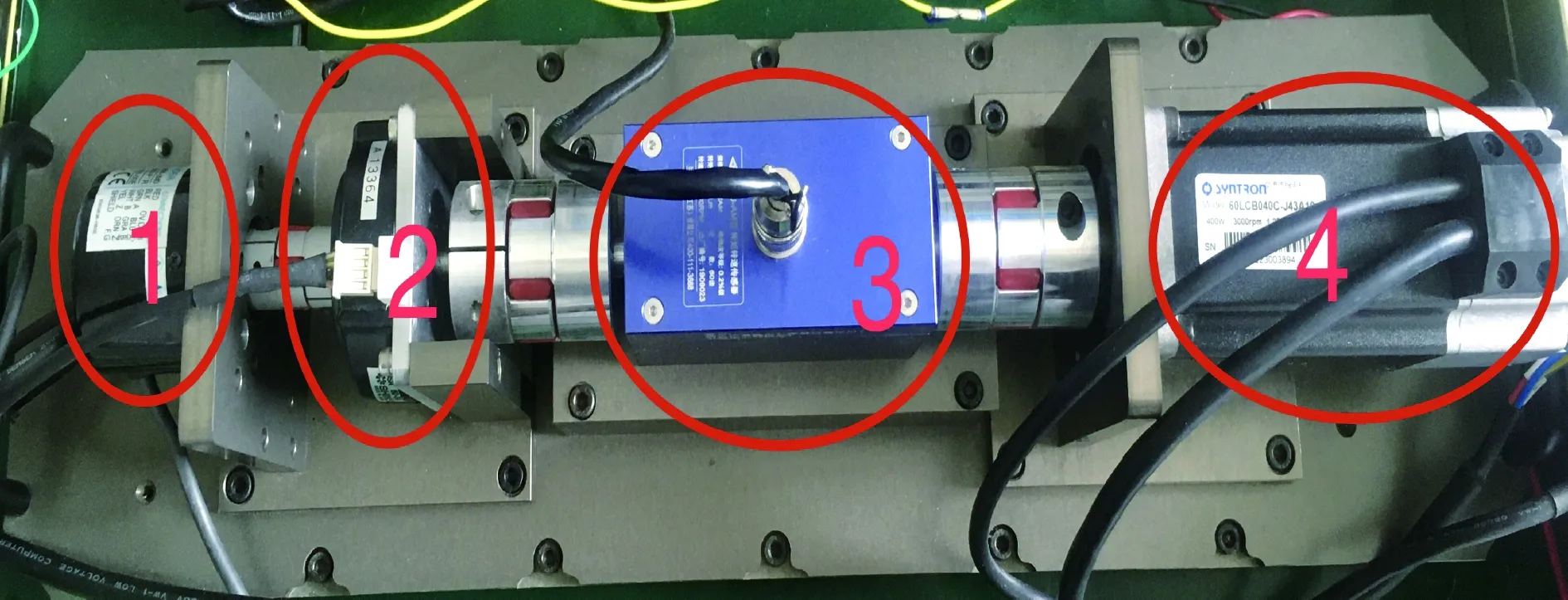
图11 电机对拖平台
电机转速、力矩、电压、负载等数据经过控制平台采集后,传送到PC机上显示与保存。PC机上运行基于RNN的辨识算法,将采集到的数据作为输入变量供RNN辨识算法进行运算,保存神经网络的输出结果,进行绘图并分析实验结果,实现对RNN辨识算法的验证。
为了预测超声波电机的力矩-速度迟滞特性,首先对RNNI进行训练。RNNI要用到的训练参数如下:
(1)损失函数
损失函数的作用是评估神经网络的准确度,函数的输入是神经网络的预测值和实测值,输出是它们的误差。在训练中损失函数采用均方误差函数MSE。MSE数值越小,说明神经网络模型误差越小,性能越好。MSE定义:

(2)训练集与测试集的构建
数据集由10组不同驱动信号和不同负载情况下的转速、力矩、电压等数据构成。负载分别设定为0.254 N·m、0.318 N·m、0.38 N·m、0.406 N·m。这些数据均在半实物仿真平台上采集得到,其中,8组数据作为训练集进行RNNI的训练,共有40 000条数据;2组数据作为测试集对RNNI进行测试,共有10 000条数据。
(3)标准化处理
在训练神经网络时,为了加速神经网络的训练和收敛速度,我们对数据集进行标准化处理,也就是对数据集进行归一化操作,将数据数值变换为0~1之间,变换关系如下:
式中:μ是均值;σ2是方差;Xin是输入数据;Xout是输出数据。选取跟踪给定速度y=180+30sin(9.42t),负载0.254 N·m时的一组转速数据来显示标准化的效果。
通过计算图12(a)的原始数据,得到该组数据均值μ=181.644,方差σ2=548.853,代入标准化公式,可得到标准化处理后的转速曲线,如图12(b)所示。
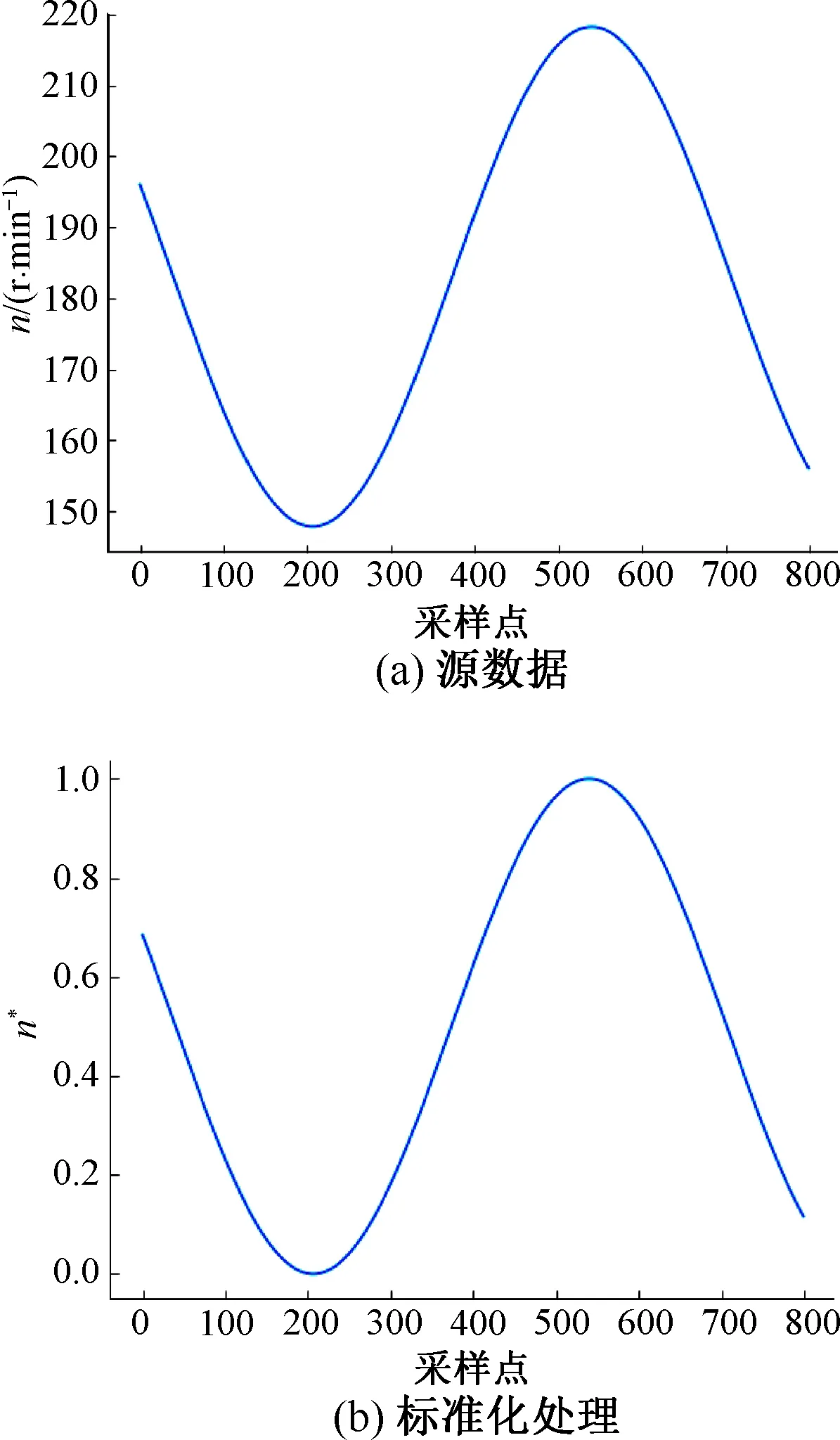
图12 标准化(归一化)处理
(4)网络参数
由图9的RNNI神经网络结构可知,输入层的神经元个数为2个,输出层的神经元个数为2个。我们使用反复训练和测试的方法来确定隐藏层神经元的个数。测试使用数据为跟踪给定速度y=180+30sin(9.42t) (一个周期约667个点),负载0.254 N·m下的一部分转速数据,共有4 000条数据,并进行标准化处理,学习率设置为0.01,设置训练迭代1 000次。使用不同神经元个数进行训练的训练时间和均方误差MSE如表1所示。由表1可见,使用较少的神经元进行训练,虽然减少了训练所需时间,但降低了模型的拟合程度,误差变大,出现了欠拟合的问题;使用较多的神经元进行训练,不仅训练时间变长,而且误差变大,出现了过拟合的问题。由实验结果可知,如果设定隐藏层的神经元个数为20个,可以在较短的时间内达到较好的训练效率和拟合准确度。

表1 不同神经元个数下的MSE和训练时间
对于学习率的确定,我们也使用同样的方法,实验中只改变学习率而其他参数不变。使用不同学习率进行训练的时间和均方误差MSE结果如表2所示。
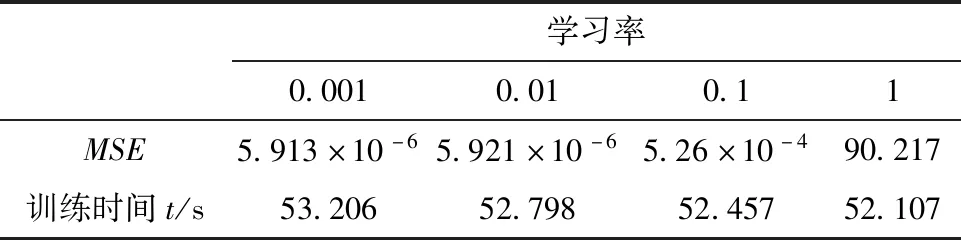
表2 不同学习率的MSE和训练时间
由表2可见,使用较小的学习率进行训练,误差较小,但训练时间变长;使用较大的学习率,虽然训练时间减少,但会导致误差增大,甚至导致网络无法收敛。当学习率分别使用0.001和0.01时,神经网络的误差比较接近,我们选择训练时间较少的学习率0.01来训练神经网络。
(5)训练过程
在准备好数据集并设置好网络参数后,就可以对RNNI进行训练。RNNI的输入是电机的转速与输出力矩,输出是预测的电机转速与力矩。RNNI的训练流程如下:设置好的网络各项参数,设置迭代计算的次数,网络权重使用随机初始化。第一步是通过神经网络输入数据,神经网络计算得到预测值;第二步是计算相应的损失函数;第三步是利用反向传播算法对网络的权重进行修正。重复上述过程,当迭代到最大次数时停止模型训练。
我们分别在负载0.254 N·m、0.318 N·m、0.38 N·m、0.406 N·m的情况下对数据进行训练,迭代次数设置为1 000。表3显示了不同负载情况下的模型收敛情况与误差。RNNI的训练损失值变化曲线如图13所示。从图13可以看出,在不同负载下模型收敛情况良好,误差较小,没有发生过拟合或欠拟合的问题。由训练结果可知,负载越小,网络收敛得越快。

表3 不同负载下的训练结果
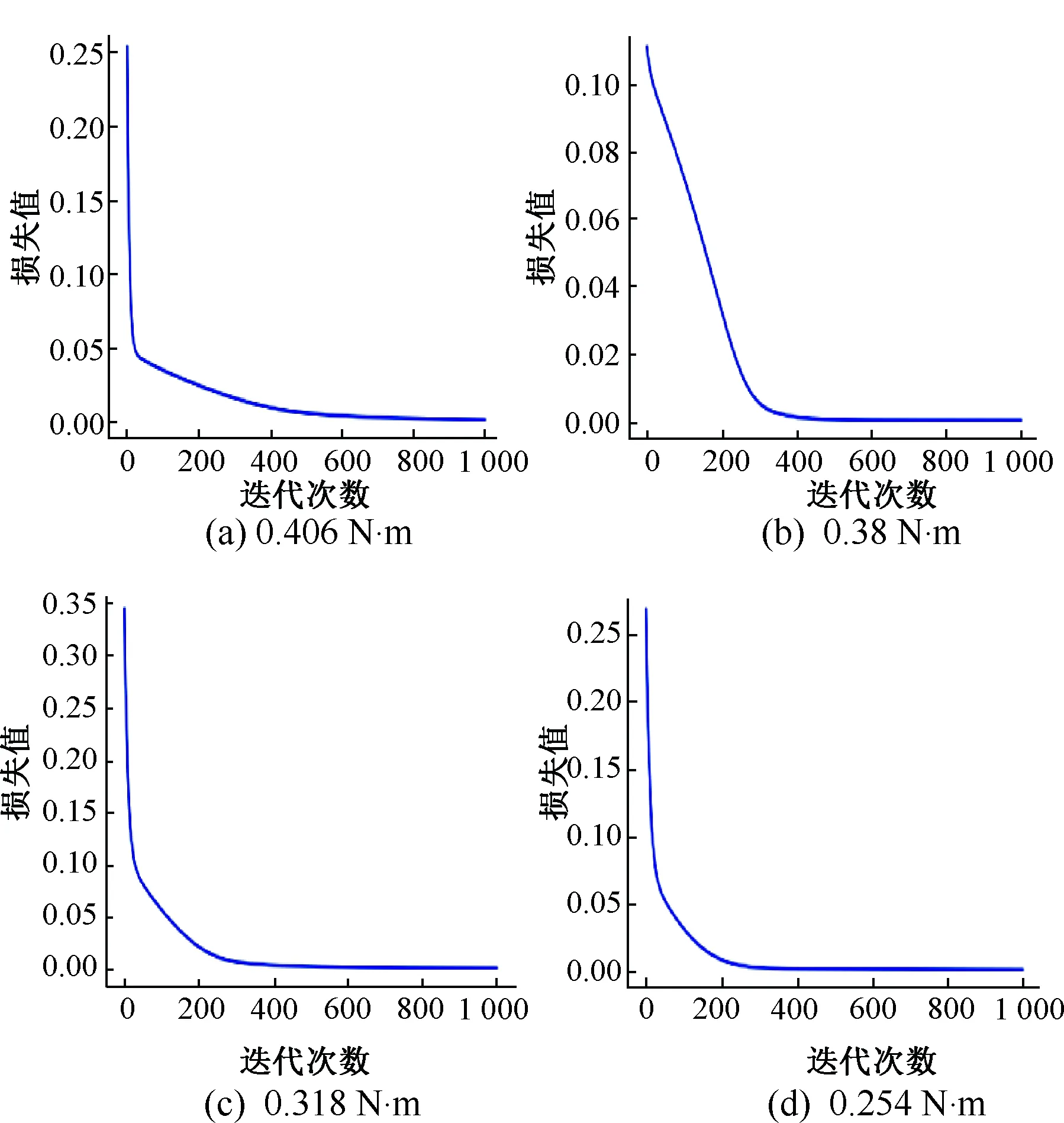
图13 不同负载下的损失值变化曲线
RNNI的目的是实现超声波电机力矩-速度迟滞非线性的辨识。模型训练结束后,为了验证RNNI的有效性,观察RNNI在不同负载情况下迟滞曲线的辨识效果来验证辨识器的性能。同时,通过绘制绝对误差曲线来观察辨识过程中的误差变化情况,并通过计算平均绝对误差来评估辨识的效果。平均绝对误差MAE定义:

接着对不同负载的迟滞曲线进行辨识,下面以负载0.318 N·m加以说明,其他负载时情况类似,对辨识器验证时给定跟踪速度不变。
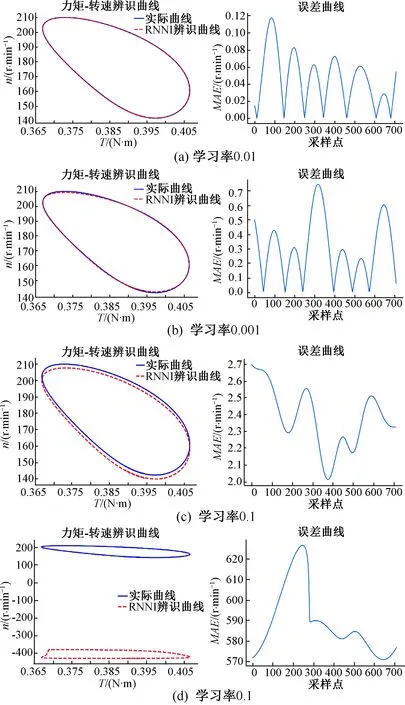
图14 负载0.318 N·m时辨识结果和误差
图14是负载为0.318 N·m,学习率为0.001、0.01、0.1与1的辨识结果和误差,由图14的辨识结果可知,学习率为0.01和0.001时,RNNI都可以较准确地对电机的迟滞情况进行辨识且误差较小,可见负载对RNNI的收敛影响不大,RNNI的抗负载干扰能力较强。另外,学习率为0.01、0.001时辨识误差分布基本没有规律,在一个周期的起始点和终止点的辨识误差不大,在一个周期的其他区间段出现误差峰值。学习率为1时辨识误差非常大,基本没有达到辨识目的。在其他负载情况下都有上述类似的情况出现。
不同负载下的辨识误差如表4所示。从表4负载与学习率的关系可以看出:学习率为0.01、0.001而负载不同时,辨识误差基本随着负载的减小而增大;同样负载条件下学习率为0.01时辨识误差最小,在不同负载下学习率为0.001时辨识误差比0.01略大,学习率为0.1时的辨识误差比0.01和0.001时大很多,学习率为1时辨识效果较差。综上所述,选择学习率为0.01时辨识效果较好。

表4 不同负载下的辨识误差MAE (r·min-1)
总之,通过合理选择RNNI网络参数,并对比表1~表4结果可以知道,对电机迟滞的辨识可以达到MSE小于6×10-4,不同负载下辨识误差小于0.11,可以实现对力矩-速度迟滞的有效辨识。
4 结 语
本文以LCC驱动电路为基础,针对不同条件下超声波电机的速度-力矩迟滞,使用RNNI对电机迟滞进行辨识,得到相应的辨识算法,然后通过实验加以验证。由实验结果可知,当参数选择合适的情况下RNNI对不同负载下的超声波电机速度-力矩迟滞辨识效果较好。
