基于自适应虚拟阻抗的牵引辅助逆变器并联控制
2022-11-18谭喜堂李爱华朱琴跃魏伟李姚霖
谭喜堂,李爱华,朱琴跃,魏伟,李姚霖
(同济大学 电子与信息工程学院,上海 201804)
0 引 言
牵引辅助逆变器是保证城市轨道交通列车正常运行的重要组成部分,其工作状态直接影响到车辆运行的安全性能。在列车辅助供电系统中,单台逆变器由于无法满足系统的可靠性和冗余性需求,现多采用逆变器并联运行方式[1-2]。目前,并联逆变器的控制技术主要分为有互连线控制和无互连线控制两类[3]。其中有互连线控制功率分配准确、均流精度高,但过于依赖通信手段,若通信线路发生故障或扰动可能会导致控制不精确甚至系统失稳。无互连线控制则更多采用下垂控制,该方法可以实现逆变器独立运行和即插即用功能[4-5],近年来成为逆变器并联控制的研究热点。
然而,当各辅助逆变器的等效输出阻抗不一致时,会导致并联系统功率分配不均,同时也会增大系统环流[6-10]。为了解决等效输出阻抗不一致对系统功率分配和环流的影响,国内外学者进行了深入的研究。文献[11]在传统下垂控制的基础上引入分层控制,利用中央控制器计算无功额定值,实现功率均分的目的。文献[12]采用统一的二次控制器,生成各台逆变器的参考电压和频率,以此实现均分功率,但文献[11-12]由于引入了通信手段,导致系统可靠性降低。文献[13]通过改变下垂系数,从而使分布式电源的负载功率均分,但自适应下垂系数计算过程较复杂且需要提前获悉线路参数,此外,下垂系数的改变易降低系统运行稳定性。现大多数研究都是采用基于虚拟阻抗的下垂控制技术,即在传统下垂控制中引入已经设计好的虚拟阻抗来重塑逆变器的输出阻抗[14],使得逆变器并联支路的等效输出阻抗之间能够互相匹配,减少功率之间的相互耦合,从而实现并联逆变器的功率均分和环流抑制。文献[15]采用一种改进下垂控制与虚拟电抗相结合的控制方法实现系统有功功率与无功功率的解耦, 但该方法的精度不高。文献[16-19]通过引入虚拟阻抗来改善线路阻抗的特性,解决系统输出功率耦合的问题,但虚拟阻抗的引入会使得公共母线电压降低。
为了解决上述问题,本文针对牵引辅助逆变器并联供电系统,首先分析其功率和环流特性,基于阻性下垂控制方法,引入自适应虚拟阻抗,保证列车牵引辅助逆变器并联供电系统的各模块等效输出阻抗一致,并在此基础上进行负载电压跌落补偿,从而解决由于并联系统中各辅助逆变器等效输出阻抗不一致所导致的传统下垂控制策略中系统环流较大、功率分配不均及输出负载电压跌落的问题。最后,通过仿真和实验对所提控制策略的有效性进行验证。
1 功率和环流特性分析
1.1 并联辅助逆变器的功率特性

由图1可得各辅助逆变器(i=1,2)的等效输出阻抗为
ZLi=ZLi∠θLi=Zi∠θi+Zli∠θli。
(1)
输出电流为
(2)
各辅助逆变器的输出复功率为
(3)
由此可得Pi和Qi表达式为:
(4)
在正常稳定运行情况下,辅助逆变器输出电压与并联点电压的相角差δ1和δ2很小,基本接近0°。同时,实际牵引辅助逆变器为低压系统,其线路阻抗呈阻性,即θLi=0°,由此式(4)可表示为:
(5)
可见,辅助逆变器输出的有功功率主要是由其输出电压的幅值Ei决定,而输出的无功功率主要取决于输出电压的相位δi,阻性下垂控制可通过分别调整Ei和δi来实现对辅助逆变器输出有功功率和无功功率的控制,相应控制表达式为:
(6)
式中:ω0和E0为初始给定的频率及电压幅值;ni和mi分别为有功下垂系数与无功下垂系数;Pi及Qi为辅助逆变器实际输出有功功率及无功功率;ωref和Eref为经过功率下垂计算后给定的辅助逆变器参考电压的频率和幅值。
由式(6)可知,当辅助逆变器输出有功较大,通过下垂控制减小起始输出电压幅值,能够控制其输出有功过大;而当辅助逆变器输出的无功较大时,则通过下垂控制增大起始频率,减少无功输出,从而实现辅助逆变器有功和无功的平衡输出。
但传统阻性下垂控制也存在着电压跌落与有功功率分配之间的固有矛盾,如图2所示,当并联的两台辅助逆变器等效输出阻抗Z1≠Z2时,必然存在功率均分与电压偏差的矛盾。当通过选择降低有功下垂系数来达到更好的有功分配效果时,即ΔP2<ΔP1,在电压跌落上则会导致此时的电压偏差ΔE2>ΔE1,从而导致并联系统输出电压存在更大的偏差,影响并联系统的稳定运行。
1.2 并联辅助逆变器环流
(7)
根据式(7)可知,并联系统中各辅助逆变器间环流的大小,不仅取决于各个辅助逆变器输出电压,还取决于各辅助逆变器的等效输出阻抗,在实际的辅助逆变器并联系统中,各个辅助逆变器的等效输出阻抗不完全一致时,将会导致系统环流较大,由此表明,虽然通过阻性下垂控制实现了对各辅助逆变器输出电压幅值和相位的控制,但由于等效输出阻抗的差异也可能导致环流增大。
2 基于自适应虚拟阻抗下垂并联控制

2.1 自适应虚拟阻抗设计
由第1节分析可知,传统阻性下垂控制能够通过调节各辅助逆变器的输出电压幅值和相位来分别实现负载有功功率和无功功率的均分,但并联系统等效输出阻抗不一致也会导致系统出现环流增大的问题,通过虚拟阻抗技术对并联系统中各辅助逆变器的等效输出阻抗进行调整,能够解决此问题。而传统的虚拟阻抗添加方式会造成系统输出电压的严重跌落。对此,引入自适应虚拟阻抗,在能够避免由于引入较大虚拟阻抗参数而导致过大电压跌落的同时,也能够将辅助逆变器等效输出阻抗配置纯阻性,进而保证阻性下垂控制在辅助逆变器并联系统中的适用性。
对式(4)中阻抗进一步展开,可得系统有功功率和无功功率为:
(8)
由于逆变器并联系统中,稳定运行时输出相角δi很小且基本为0,式(8)可进一步简化为:
(9)
由式(9)可以看出,等效输出阻抗中电阻、感抗参数分别与输出有功功率和无功功率相关,即Pi∝RLi,Qi∝XLi。
由此,可设计自适应虚拟阻抗为:
(10)
式中:Rset为预设定虚拟电阻值;Po为辅助逆变器实际输出有功功率;Qo为辅助逆变器实际输出无功功率;Pref为辅助逆变器输出最大有功功率;Qref为辅助逆变器输出最大无功功率;kRp、kXp分别为虚拟阻抗中电阻、电抗的比例调整系数;kRi、kXi分别为虚拟阻抗中电阻、电抗的积分调整系数;P′、Q′分别为辅助逆变器实际输出有功功率、无功功率的逼近值,其表达式为:
(11)
P′与Q′初始给定值分别为Pref与Qref,P′、Q′通过PI控制器不断改变RV、XV的值,从而调节辅助逆变器实际的输出有功功率及无功功率,最终P′、Q′会逐渐逼近Po、Qo,RV、XV和Po、Qo都会趋于稳定,由此达到自适应效果。理想情况下,通过设定的电阻值Rset对各个辅助逆变器并联等效输出阻抗进行整定,从而进一步控制由于等效输出阻抗不一致导致的功率均分偏差及系统环流大小。
为限制加入自适应虚拟阻抗后的辅助逆变器并联系统的负载电压跌落,预设定虚拟电阻值Rset以及虚拟感抗参数需要添加如下限制条件:
(12)
辅助逆变器输出有功功率取得最大值即对应实际输出最大有功功率,Rset与自适应虚拟阻抗中电阻之差应大于0;而在实际输出最小有功功率时应小于实际并联输出等效电阻中最大电阻值。同理,在实际输出最大无功功率时,应限制负虚拟感抗小于0,输出最小无功功率时,则需要小于实际线路电抗的最大值。该限制条件为Rset、kRp、kXp以及kRi、kXi参数调整提供了一个取值参考。
2.2 电压跌落补偿计算
由于引入自适应虚拟阻抗,输出负载电压与给定参考电压间的电压偏差增大,此时的电压偏差相量图如图4所示,为保证并联供电系统输出负载电压满足负载额定电压的波动范围,需要进行电压补偿。
由图4可得出电压偏差的横向和纵向分量分别为:
(13)
由于牵引辅助逆变系统中等效输出阻抗的电抗较小,故电压横向分量主要由有功功率大小决定,电压纵向分量则主要由无功功率大小决定。而电压跌落一般由横向分量决定,因此补偿电压可表示为
(14)
理想情况下,通过自适应虚拟阻抗控制方法可将并联输出等效阻抗设定为Rset,为简化电压补偿计算过程,将输入电压跌落补偿等效为理想情况下输出电流在设定虚拟阻抗Rset上的电压降,即
(15)
2.3 双闭环解耦控制
由于辅助逆变器采用LC滤波,电感电容元件会导致d-q轴上分量存在耦合情况,为对其进行有效解耦,采用电压电流双闭环控制方法如图5所示。
由图3可得,在d-q坐标系下有:
(16)
(17)
式中:ud、uq分别为三相滤波电感电压和滤波电容电压之和在d-q轴下的分量;uod、uoq分别为辅助逆变器三相负载电压在d-q轴下的分量;iLd、iLq分别为辅助逆变器三相输出电流在d-q轴下的分量;iod、ioq分别为辅助逆变器三相负载电流在d-q轴下的分量。
由式(16)和式(17)可知,由于d轴分量与q轴分量之间存在耦合关系,为此采用电流内环和电压外环的双闭环控制方法,对d-q轴上的电压和电流分量进行解耦控制。
根据式(16)对电流内环进行闭环设计,相应的输出电压为:
(18)
(19)
同理,根据式(17)对电压外环进行闭环控制设计,为了保证输出电压的快速稳定,在电压外环采用比例积分控制器,参考电流值可以设为:
(20)
式中uud和uuq为比例积分控制器输出的d-q轴参考电压,表达式为:
(21)
由此,通过在闭环反馈d-q轴上各自引入电流电压反馈,从而对电压外环d-q轴的耦合分量ωLfiLq、-ωLfiLd和电流内环d-q轴耦合分量ωCfuoq、-ωCfuod形成抵消,进而实现d-q轴分量的解耦,实现对电流、电压的无误差跟踪。
3 仿真验证
为验证所提的基于阻性自适应下垂并联供电控制及电压跌落补偿方法的有效性,在MATLAB/Simulink中搭建简化的列车用两辅助逆变器并联系统仿真模型。通过模拟辅助逆变器并入、负载突加及负载突减三种工况,对传统下垂并联控制和自适应虚拟阻抗下垂并联控制两种控制方法的仿真结果进行对比分析。
假设t=0~0.2 s时,并联系统中辅助逆变器1带载启动运行,t=0.2 s时,辅助逆变器2带载并入;t=0.4 s时,并联系统突加负载;t=0.6 s时,并联系统突减负载。并联供电系统仿真运行时间为0.8 s,仿真参数设置如表1所示。
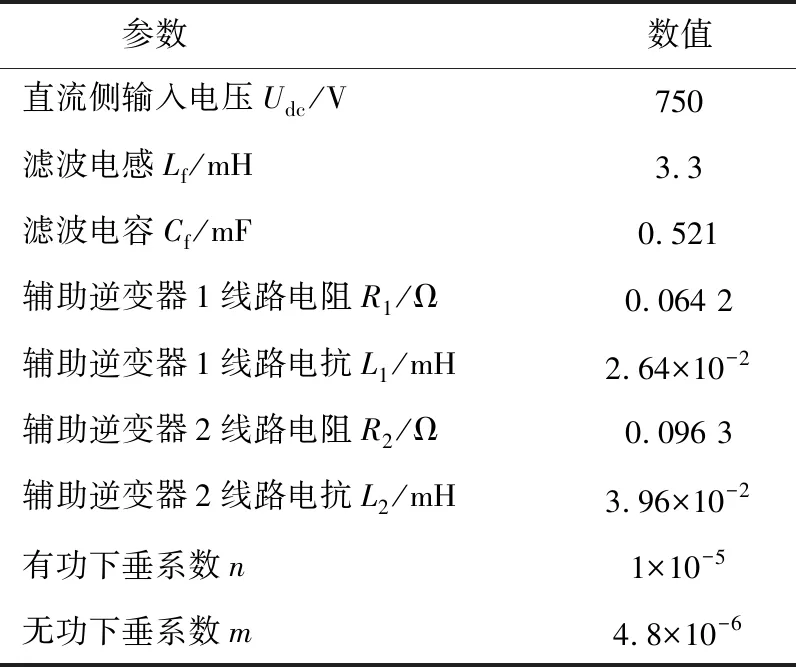
表1 逆变器并联系统仿真参数
3.1 功率分配仿真结果
3.1.1 有功功率分配仿真结果
图6为并联系统在辅助逆变器并入、突加负载以及突减负载三种工况下传统控制方法和所提方法的有功功率分配仿真结果。在系统输出功率稳定后,传统控制方法和所提方法在三种工况下的系统有功功率差值ΔP和均分差值如表2所示。
可见,在系统输出功率稳定后,所提方法较传统控制方法在辅助逆变器并入、突加负载及突减负载工况下有功功率均分差值明显下降,并联系统中功率得以更好平均分配。
3.1.2 无功功率仿真结果
图7为并联系统在辅助逆变器并入、突加负载以及突减负载三种工况下传统控制方法和所提方法的无功功率分配仿真结果。在系统输出功率稳定后,传统控制方法和所提方法在三种工况下的系统无功功率差值ΔQ和均分差值如表3所示。
可见,在系统输出功率稳定后,所提方法较传统控制方法在辅助逆变器并入、突加负载及突减负载工况下无功功率均分差值明显下降,并联系统中功率得以更好平均分配。
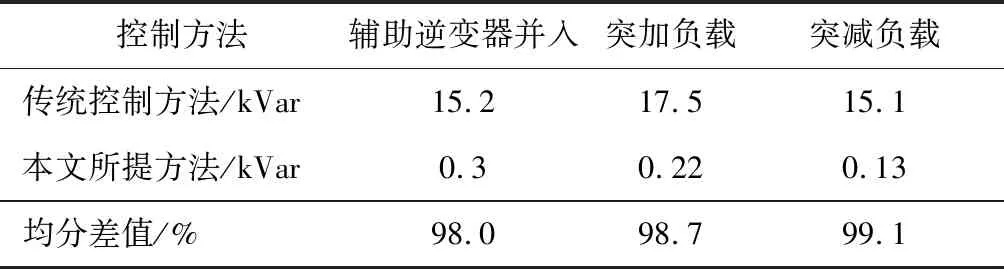
表3 两种控制方法下系统无功功率ΔQ对比
3.2 环流仿真结果
图8为并联系统在辅助逆变器并入、突加负载及突减负载三种工况下传统控制方法与所提方法的环流仿真结果。由快速傅里叶变换(fast Fourier transform,FFT)分析可知,传统控制方法和所提方法在三种工况下的系统环流幅值和对应环流幅值下降百分比如表4所示。由此表明,所提方法显著抑制了系统环流,提高了并联系统稳定性。
3.3 电压补偿仿真结果
图9为并联系统在辅助逆变器并入、突加负载以及突减负载三种工况下无电压补偿控制与添加电压补偿控制的输出负载电压波形及其稳定负载电压FFT分析。在设定同样的下垂系数及参考电压参数的情况下,无电压补偿的传统控制方法和添加电压补偿的所提方法的负载电压跌落如表5所示。
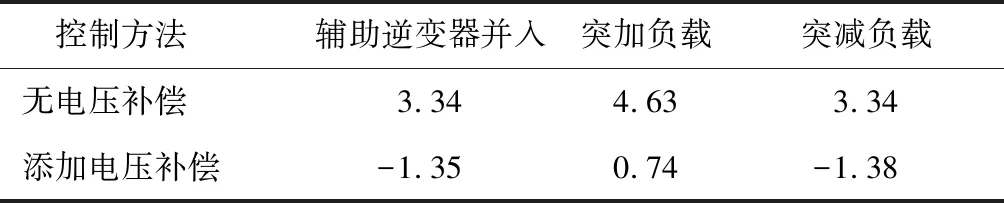
表5 电压补偿控制前后负载电压跌落对比
可见,添加电压补偿控制较无电压补偿控制的负载电压跌落更低。故添加电压补偿控制能够保证并联系统添加自适应虚拟阻抗后,系统输出负载电压跌落波动在±3%的范围内,符合辅助逆变器并联供电系统中负载电压的波动要求。
4 实验验证
通过搭建两辅助逆变器并联供电的降功率实验系统来验证所提方法的有效性。实验系统如图10所示,其中编号1、2、3、4、6、7、8分别为辅助逆变器1、2控制器及驱动电路、功率开关管、主电路LC滤波器和并联等效输出阻抗(由于实验室限制,实验中线路阻抗仅采用不一致线路电阻作为等效线路阻抗),5为电压传感器,9为电流传感器,10、11分别为并联系统负载1和负载2。
4.1 功率分配实验结果
4.1.1 有功功率分配实验结果
通过输出负载电流及负载参数能够得出输出功率数据并进行平滑处理,从而得出两种控制方法在辅助逆变器并入、突加负载工况下的系统有功功率分配实验结果对比图,如图11和图12所示。图中,通过将功率数据进行FFT频谱分析,求取其在0 Hz处的幅值进行分析比较,可以得到传统控制方法和所提方法在两种工况下系统输出有功功率分配及其偏差如表6所示。
可见,在所提方法下系统有功功率分配结果较传统控制方法更好,偏差也显著降低。
4.1.2 无功功率分配实验结果
同理,可得两种控制方法在辅助逆变器并入、突加负载工况下的系统无功功率分配实验结果对比图,如图13和图14所示。传统控制方法和所提方法在两种工况下系统输出无功功率分配及其偏差如表7所示。
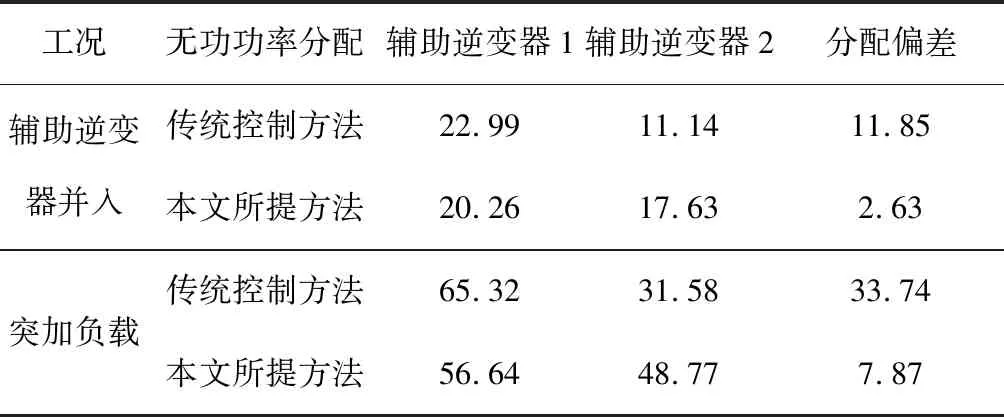
表7 两种控制方法下系统无功功率分配结果对比
可见,在所提方法下系统无功功率分配结果较传统控制方法更好,偏差也显著降低。
4.2 环流实验结果
两种控制方法下并联系统在辅助逆变器并入和突加负载工况的环流及其FFT频谱分析如图15和图16所示。由系统环流FFT分析可知,两种控制方法下的系统环流幅值和相应的下降百分比如表8所示。

表8 两种控制方法下系统环流对比
由此可知,所提方法并联系统的环流更小,保证并联系统的正常运行,也降低了并联系统运行损耗。
4.3 电压补偿实验结果
图17为无电压补偿控制和添加电压补偿控制的并联系统全额运行负载电压波形及其FFT频谱图,两种控制方法中参考电压为32 V,无电压补偿控制和添加电压补偿控制的输出负载电压幅值和跌落如表9所示。
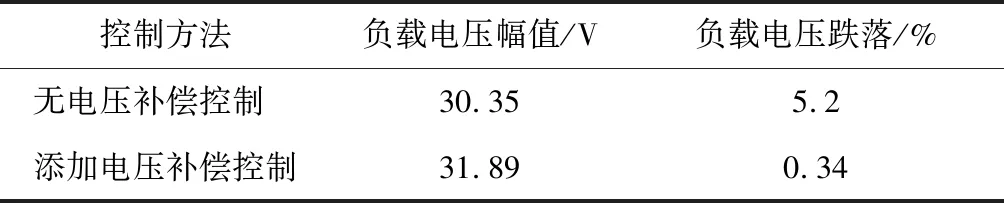
表9 电压补偿控制前后负载电压对比
由此可以看出,无电压跌落补偿控制全额运行下电压跌落已经超过±3%,无法满足负载电压稳定性要求,因此,负载可能工作于低电压状态而影响系统正常运行,添加电压跌落补偿能够保证负载电压跌落在±3%范围内,保证系统稳定运行。
5 结 论
本文对列车牵引辅助逆变器并联系统进行分析,提出一种基于自适应虚拟阻抗下垂并联控制方法。在传统阻性下垂控制的基础上,引入自适应虚拟阻抗,对并联系统中辅助逆变器等效输出阻抗进行调整,解决了采用较大虚拟阻抗参数而导致的电压跌落问题,能够更好地将辅助逆变器等效输出阻抗配置为纯阻性,进而保证阻性下垂控制在低压辅助逆变器并联系统的适用性,在实现列车牵引辅助逆变器并联系统负载功率均分的同时,也抑制了因系统线路阻抗不一致而产生的环流。在采用本文所提方法的仿真和降功率实验中,系统负载功率均得到了更好的均分效果。在环流抑制效果上,仿真结果表明系统环流下降了近98%,实验结果表明系统环流下降了近53%,均取得了明显的环流抑制效果。与此同时,提出的电压跌落补偿控制,也能保证自适应虚拟阻抗加入后负载电压跌落在±3%范围内,实现了系统稳定运行时负载电压跌落的有效控制。