谐振光学陀螺小型化半导体光源温控模块设计
2022-11-11车双良汤金秋舒晓武
车双良,汤金秋,陈 侃,邹 康,佘 玄,舒晓武
(浙江大学 光电科学与工程学院,杭州 310027)
谐振式光学陀螺(Resonator Optical Gyroscope,ROG)是一种基于光学Sagnac效应的高精度角速度惯性传感器件[1],相较于传统的干涉式光纤陀螺需要数千米长的光纤环来提升检测精度,谐振式光学陀螺由于谐振增强效应仅需要数米光纤环即可实现相同检测精度[2],因此在小型化、集成化以及成本上具有较大优势。谐振式光学陀螺系统中理想的光源是窄线宽半导体激光器[3],与其它类型的激光器相比,半导体激光器具有体积小、重量轻、寿命长及价格便宜等显著优势,但其对管芯温度变化十分敏感,温度的微弱变化会对半导体激光器的输出波长及输出功率稳定性产生明显影响[4]。因此,实现高精度且快速稳定的半导体激光器温度控制模块,对于提升ROG系统输出性能具有非常积极的意义。
半导体激光器中温控执行器件为热电制冷器[5](Thermo Electric Cooler,TEC),温度控制电路可通过改变TEC输入电流的方向和大小来控制加热制冷模式以及功率,从而实现激光器管芯温度快速稳定至设定值处[6]。针对半导体激光器温度快速精确稳定方案,目前国内外主流解决思路是引入PID反馈回路[7,8]。PID控制方案主要有数字PID和模拟PID两种,基于PID自动控制的模拟电路控温精度高,但控温范围小,数字电路控温范围大,稳定性又略低,电路实现和程序均相对复杂[9]。2020年,郑本昌提出一种基于PID自动控制高精度温控电路,利用齐格勒-尼柯尔整定规则对PID电路参数进行设定,有机结合模拟电路与数字电路优点,最终实现温控精度达到±0.01℃以内,但是该方案中对PID参数的确定需要反复更换器件,调整电阻电容值,步骤较为繁琐[9];2021年,张安迪提出一种基于论域可变的模糊PID控制算法的温控系统,通过输出不同占空比的脉冲宽度调制波实现温度控制精度达到±0.1℃,该算法不仅可以减小系统超调量,还具有较强的鲁棒性,但是该方案中温控系统较为复杂,需要单片机、温度检测模块、模数转换模块以及通信模块等,不利于小型化激光器光源的实现[10]。
针对以上问题,本文提出一种操作简便同时电路易于小型化的温控方案。首先对激光器管芯TEC模块传递函数特性进行分析,基于控制理论引入PID反馈电路,设计确定合适的反馈参数,使其具有较好的直流响应和动态性能,最终可实现管芯温度的高精度快速稳定。最后对激光器输出光功率及频率稳定性和线宽等光学性能进行了测试,验证该半导体光源模块温控性能满足陀螺系统相应指标,可有力支撑和推进小型化谐振式光学陀螺的技术发展。
2 TEC开环传递函数特性分析
半导体激光器驱动电路主要分为恒流源模块和温控模块[11],其中恒流源模块为管芯中发光二极管提供稳定的驱动电流,驱动电流的波动将导致输出光功率以及中心波长的不稳定性,目前关于恒流源电路的研究已趋于成熟。温控模块通过控制TEC保持激光器管芯的温度稳定,从而使得激光输出性能稳定。为了获得良好的环境适应性,须使激光器管芯的温度保持稳定,因此驱动电路中温控模块需要更精准的设计。目前常见方案是通过在温控电路中引入PID补偿模块,使得激光器管芯温度快速稳定,而TEC作为温度控制的执行器件,分析其传递函数特性,对PID反馈参数的选择具有指导意义。
TEC模块输入信号为控制电压信号,而响应则是管芯温度,为了测试方便须将温度信息转换为易于观测的电压信号,因此设计了如图1所示的TEC开环输出电路,主要由TEC、热敏电阻、电阻桥以及仪表放大器组成。信号发生器产生电压信号Vin控制TEC进行制冷或制热,热敏电阻NTC敏感管芯温度变化并转化为电阻值的改变,电阻桥将热敏电阻阻值变化转换成电压信号变化,最终通过仪表放大器进行放大得到输出信号Vout,至此TEC开环模块传递函数可表述为HTEC=Vout/Vin。
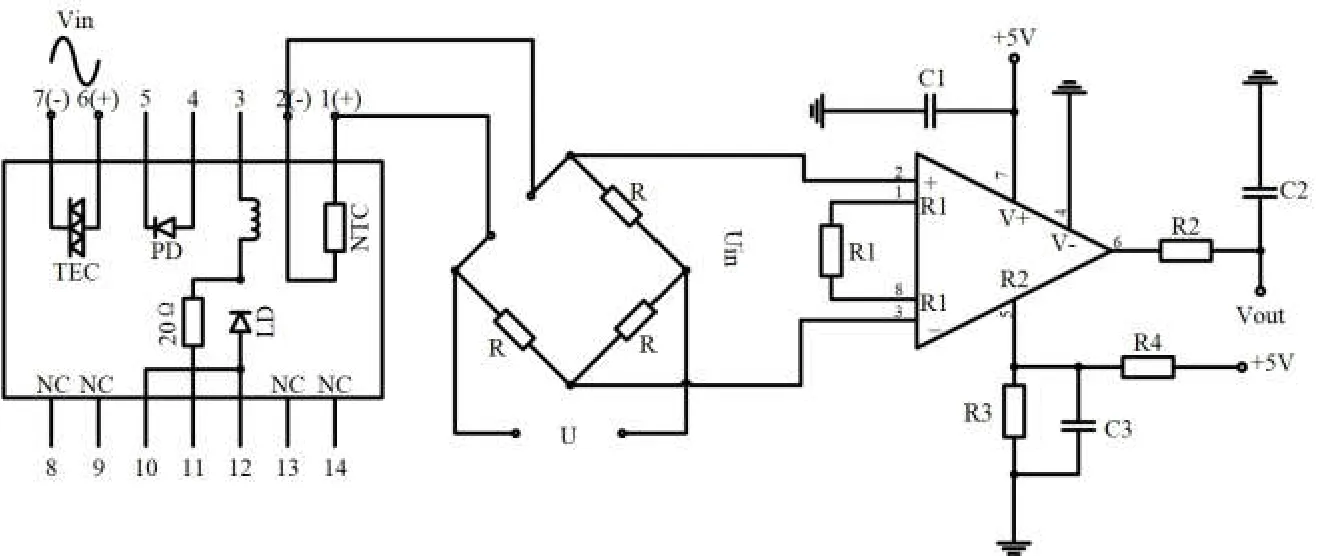
图1 TEC开环输出电路示意图Fig.1 TEC open loop output circuit diagram
搭建了如图2所示的TEC模块开环传递函数测试系统,实验中输入信号Vin为扫频正弦信号,扫描频率设置为1 ×10-3Hz到100 Hz,频率响应分析仪第一通道CH1接受频率响应分析仪内部扫频输出信号,第二通道CH2接收不同频率正弦驱动信号下仪表放大器输出信号,因此TEC模块开环传递函数可表示为:
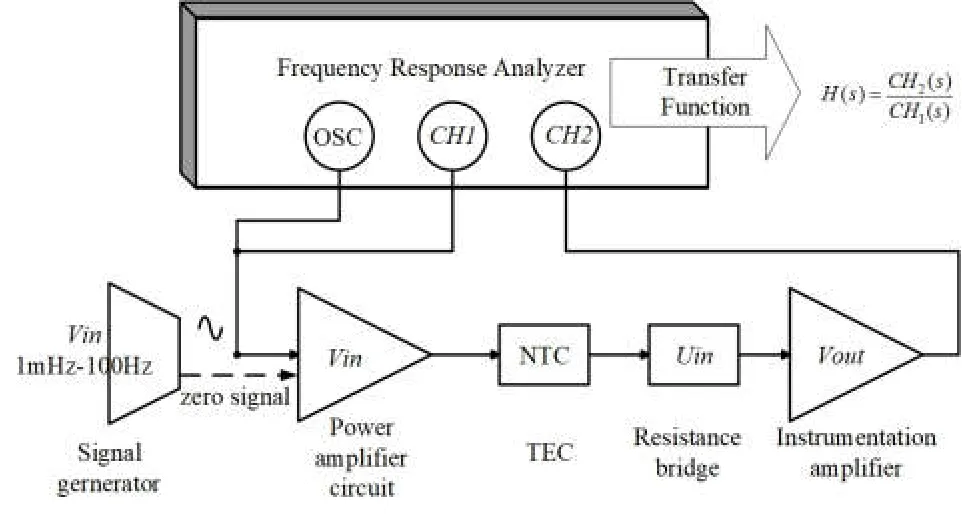
图2 TEC模块开环传递函数测试示意图Fig.2 TEC module open loop transfer function test diagram

如图3所示,给出了TEC模块开环传递函数测试结果,一共进行了三次重复试验,实验结果表明系统的传递函数包括两个极点。在低频部分,即没有经过任何极点的相位应该是180 °,到达第一个极点时,其相位应该变化45 °,对应图中相位响应曲线中的20.9 mHz,而第二个极点则应该位于系统的相位曲线相位改变135 °对应的频率处,即3.47 Hz左右处。
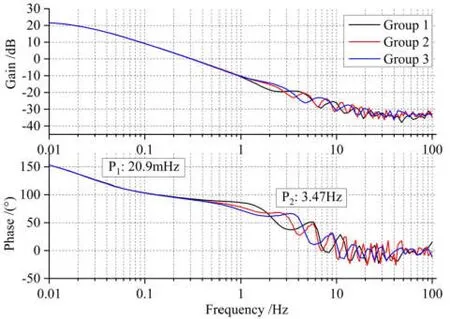
图3 TEC模块开环传递函数测试结果Fig.3 TEC module open loop transfer function test result
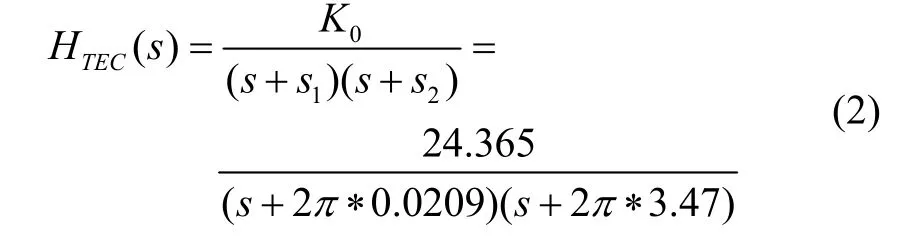
根据以上测试结果,实验测量装置的直流增益测试结果为21.6 dB,减去系统自带3 dB驱动放大,得到TEC传递函数的直流增益为18.6 dB。第一极点位置为20.9 mHz,对应弧度单位为0.131 rad/s,第二极点为3.47 Hz,对应弧度单位为21.8 rad/s。根据以上测试数据可以建立TEC开环传递函数s域模型:
3 PID补偿模型参数确定
TEC模块开环传递函数表明该系统拥有双极点,依据控制理论,当此系统工作频率达到第二极点频率后,相位变化了180 °,此时没有输入信号的情况下放大器也将产生输出信号,即出现自激振荡。相应地,在回路增益的模值等于l时设法使它的相移小于180 °,或者说在回路增益的相移达到180 °的频率下设法使回路增益的模值小于1,就可以保证放大器不致产生自激振荡。为此,通过设计合适的PID补偿参数引入PID反馈来保证闭环系统工作的稳定性。PID控制器是由比例(Proportional)、积分(Integral)和微分(Differential)三个环节组成,其数学模型为[12]:

其中:Kp为比例系数;Ti表示积分时间系数;Td表示微分时间系数;u(t)表示系统控制量;e(t)表示通过比较所获得的输出值与设定值之间的差值。
本文选取的是模拟PID反馈电路方案,采用运算放大器及电阻电容等器件搭建反馈网络。TEC温控模块正常工作在低频区域,因此在实际应用过程中仅需考虑10 Hz以下的低频特性,补偿后系统相位裕量应大于45 °,增益裕量大于6 dB。在保证系统的直流增益尽可能大,使得温控系统在低频段能够快速稳定的同时,还需使PID中积分参数较小,以提高系统的动态响应速度和控制精度。图4给出了本方案使用的模拟PID反馈电路示意图。
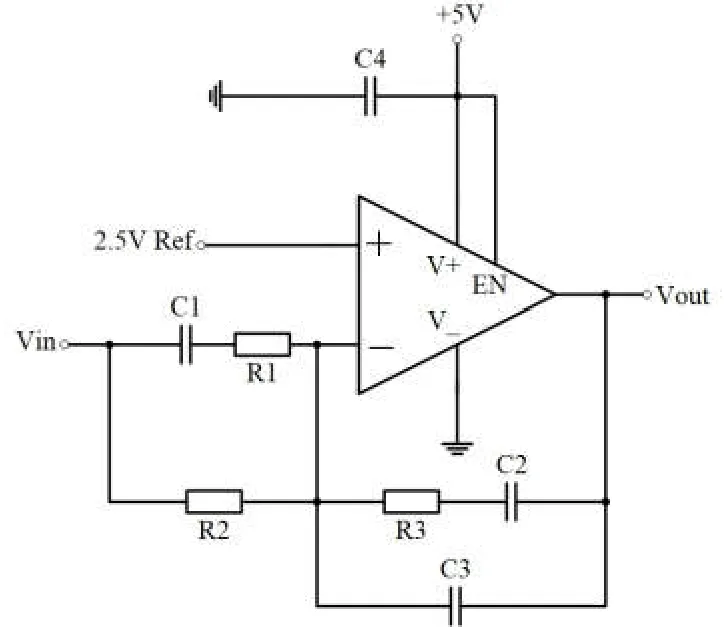
图4 模拟PID反馈电路示意图Fig.4 Analog PID feedback circuit diagram
在PID反馈参数选型中,首先确定电阻R3和电容C2的参数以获得较高的直流增益,与此同时,电阻R3和电容C2构成了第一零点,可对TEC模块中第一极点进行补偿;电阻R2和电容C1构成了第二零点,可对TEC模块中第二极点进行补偿。最后通过合理选取PID补偿模块电路中电阻电容值,使第一第二零点值分别为fz1=0.066 Hz、fz2=0.82 Hz,第一第二极点分别为fp1=21.16Hz、fp2=44.28 Hz,此时该PID补偿电路传递函数为:
对设计的温控PID反馈电路传递函数进行测试,搭建的实验测量装置如图5所示。
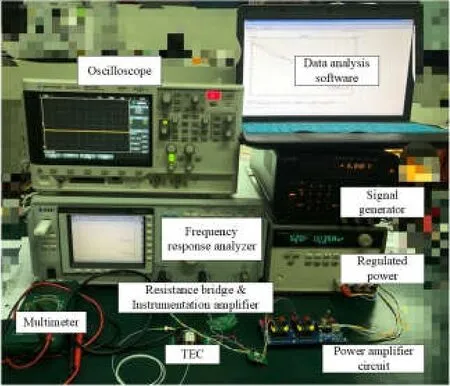
图5 PID反馈电路传递函数测试系统实物图Fig.5 PID feedback circuit transfer function test system physical picture
PID反馈电路传递函数测量结果如图6所示,结果表明该反馈回路具有两个零点和两个极点,零极点位置与上述理论分析基本符合。

图6 PID补偿电路输出波特图Fig.6 PID compensation circuit output bode diagram
利用该PID补偿电路对TEC传递函数进行反馈,可以得到闭环系统的总传递函数为:

图7给出了闭环系统的总传递函数的波特图。结果表明,在10Hz频率范围内补偿后系统相位裕量为76°,大于45°,增益裕量为44.8dB,远远大于6dB,且直流增益大于66dB,表明PID反馈模块在低频段能够快速稳定,同时具有良好的动态稳定性能。

图7 PID补偿后系统传递函数波特图Fig.7 System transfer function bode diagram after PID compensation
4 半导体激光器输出性能测试
文章采用的激光器为光迅公司窄线宽半导体激光器SPEC-NLL-001V10,基于外腔线宽压窄技术,标称输出中心波长为1550 nm,标称功率10 mW,标称输出线宽3 kHz。将恒流源电路与上述TEC温控电路设计至同一电路板上构成半导体激光器驱动电路,制作的实物如图8所示,半导体激光器驱动模块尺寸为5cm×5cm圆形,满足谐振式光学陀螺中小型化光源需求。在常温条件下,测得激光器在稳定工作时的温度变化情况如图9所示,可以看出激光器正常稳定工作后,管芯温度长期保持稳定,波动量在0.005℃左右,小于0.01℃。

图8 激光器驱动电路实物图Fig.8 Laser drive circuit physical picture
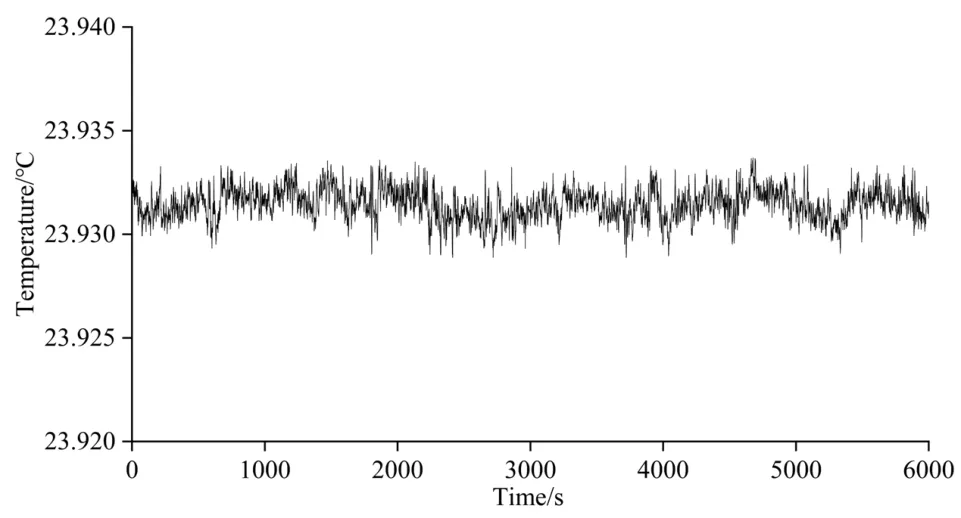
Fig.9 稳定工作时激光器温度变化曲线Fig.9 Temperature change curve of laser during stable operation
由于半导体激光器输出光学性能直接影响着谐振式光学陀螺系统输出精度,因此需要对其输出特性进行测试,并分析其对陀螺系统精度的影响。
图10是相关输出特性的测试曲线。图10(a)中可看出,采用温控反馈模块后,半导体激光器管芯受到的温度冲击小,光功率输出缓慢上升;最终稳定段光功率稳定性达到0.25%,噪声水平低,表明了驱动电路温控反馈模块具有较好的动态稳定性能。该激光器的中心波长为1550 nm,从图10(b)可看出,激光器正常工作时输出波长非常稳定,中心频移在10 MHz量级,满足陀螺系统对频率稳定性的需求。
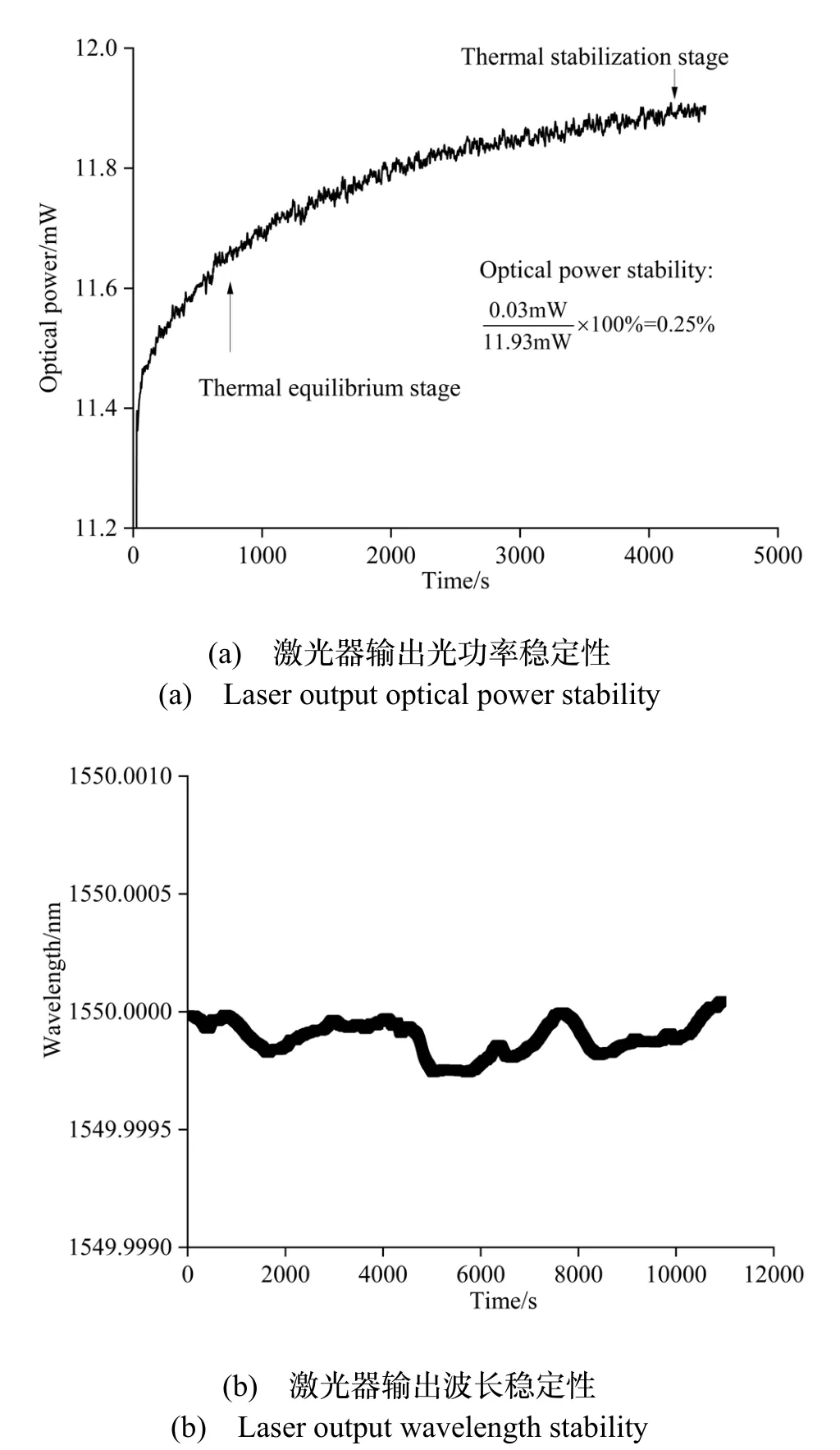
图10 激光器输出特性测试曲线Fig.10 Test curve of laser output characteristic
半导体激光器输出线宽会影响谐振式光学陀螺精细度以及极限灵敏度[13],因此还需探究采用本文温控模块下激光器输出线宽是否满足高精度谐振光学陀螺性能要求。
采用光纤延时自外差干涉法对半导体激光器输出线宽进行测试[14],试验装置如图11(a)所示,其中延时光纤环长度为50 km,声光移频器移频量为320 MHz,频谱仪采样得到线宽测试结果,如图11(b)所示,半导体激光器输出线宽为3.1 kHz。
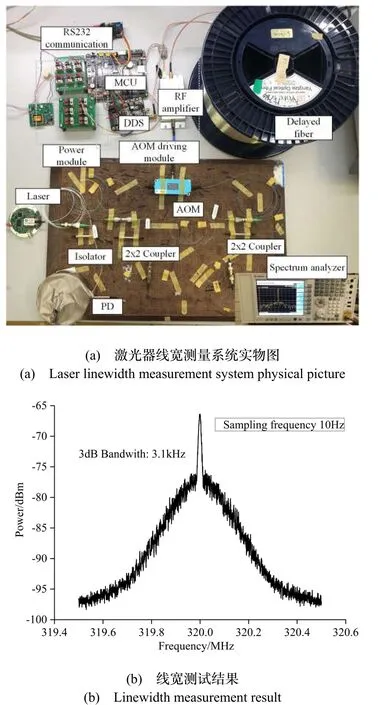
图11 激光器线宽测量Fig.11 Measurement of laser linewidth
采用谐振式光学陀螺的典型参数:谐振腔长度10 m、直径10 cm、耦合损耗0.5 dB、光纤传输损耗0.5 dB/km,进行仿真分析,计算激光器不同线宽下的谐振输出曲线变化及谐振腔精细度和极限灵敏度随线宽变化关系,结果如图12所示。

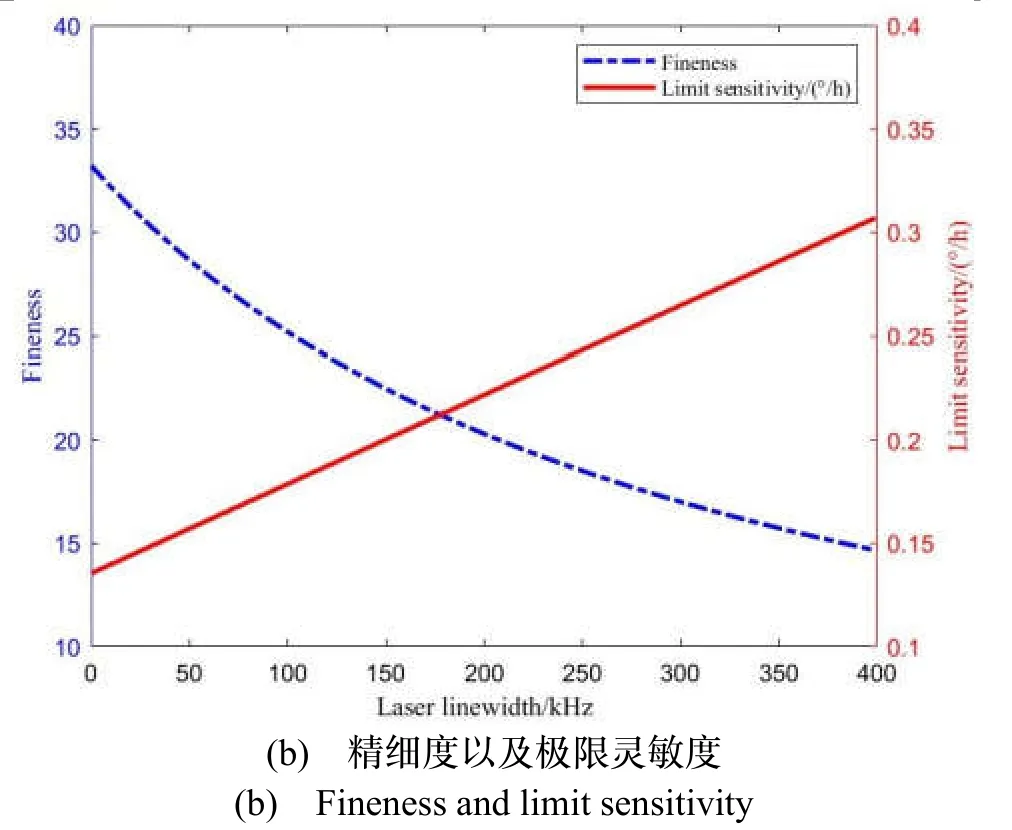
图12 激光器不同线宽下RFOG系统特性Fig.12 Characteristics of RFOG system with different laser linewidth
半导体激光器的线宽与温度有关,温度升高时线宽也会增加。由图12可知,随着激光器线宽的增大,谐振输出曲线谐振深度和精细度随之减小,极限探测灵敏度也随之恶化。针对于本文中使用的温控方案实现的3.1 kHz线宽的小型化半导体激光器,结合谐振式光学陀螺的典型参数,计算得到谐振腔精细度达到33,系统极限灵敏度[15]为0.14 °/h,表明采用本文光源温控方法的小型化半导体激光器满足高性能谐振式光学陀螺的使用要求。
5 结论
本文实现了一种直径5 cm的小型化半导体激光器驱动模块,同时针对半导体激光器TEC温控模块特性进行研究。首先对激光器管芯TEC模块开环传递函数进行测试,随后引入PID反馈模块,设计并确定了合适的反馈参数,结果表明补偿后具有较好的直流响应和动态性能,可实现管芯温度的快速稳定。正常工作时管芯温度波动小于0.01℃,满足陀螺系统需求。最后对激光器输出光学性能进行测试,得到光功率稳定性为0.25%,中心频率漂移在10 MHz量级,激光器线宽为3.1kHz,结合谐振式光学陀螺的典型参数计算得到谐振腔精细度为33,极限灵敏度为0.14°/h,满足高性能谐振式光学陀螺中小型化光源的使用需求。
参考文献(Reference):
[1]Sanders G A,Strandjord L K,Wu J,et al.Development of compact resonator fiber optic gyroscopes[C]//2017 IEEE International Symposium on Inertial Sensors and Systems (INERTIAL).USA,March 27-30,2017.
[2]Ma H,Zhang J,Wang L,et al.Development and evaluation of optical passive resonant gyroscopes[J].Journal of Lightwave Technology,2017,35(16):3546-3554.
[3]Sanders G A,Strandjord L K,Williams W,et al.Improvements to signal processing and component miniaturization of compact resonator fiber optic gyroscopes[C]//2018 DGON Inertial Sensors and Systems (ISS).Germany,September 11-12,2018.
[4]钟奇润,姜海明,戴俊珂,等.半导体激光器控制器的发展现状[J].光通信技术,2016,40(05):52-54.
Zhong Q,Jiang H,Dai J,et al.Development status of diode laser controller[J].Optical Communication Technology,2016,40(05):52-54.
[5]刘繁明,赵亚凤.一种新型的基于TEC的精密温控器设计[J].中国惯性技术学报,2004,12(06):63-66.
Liu F,Zhao Y.Design of a new TEC-based accurate incubator[J].Journal of Chinese Inertial Technology,2004,12(06):63-66.
[6]Zhang W,Shen L,Yang Y,et al.Thermal management for a micro semiconductor laser based on thermoelectric cooling[J].Applied Thermal Engineering,2015,90:664-673.
[7]张克非,蒋涛,邵龙,等.基于新型模糊PID控制单元的LD精密温控研究[J].光学精密工程,2017,25(03):648-655.
Zhang K,Jiang T,Shao L,et al.Research on precision temperature control of laser diode based on the novel fuzzy-PID control unit[J].Optics &Precision Engineering,2017,25(03):648-655.
[8]Hao Z,Li H.Design on laser diode temperature control circuit[J].Advanced Materials Research,2013,850-851:512-515.
[9]郑本昌.基于PID自动控制的高精度温控电路设计与实现[J].电子技术与软件工程,2020,(11):88-90.
Zheng B.Design and implementation of high precision temperature control circuit based on PID automatic control[J].Electronic Technology &Software Engineering,2020,(11):88-90.
[10]张安迪,张艳荣,李涛.论域可变的模糊PID控制在半导体激光器温度控制系统中的应用[J].光学学报,2021,41(12):153-161.Zhang A,Zhang Y,Li T.Application of variable domain fuzzy PID control in semiconductor laser temperature control system[J].Acta Optica Sinica,2021,41(12):153-161.
[11]王琪伟,王泽宇,杨博,等.谐振式光学陀螺用激光器双电流源混合驱动方法[J].中国惯性技术学报,2021,29(04):536-540.
Wang Q,Wang Z,Yang B,et al.Dual-current hybrid drive method for lasers used in resonator optic gyro[J].Journal of Chinese Inertial Technology,2021,29(04):536-540.
[12]霍佳皓,李洪祚.半导体激光器温度控制电路设计[J].现代电子技术,2013,20:153-155,162.
Huo J,Li H.Design of temperature control circuit for semiconductor laser[J].Modern Electronics Technique,2013,20:153-155,162.
[13]司琪,冯喆,于昌龙,等.激光器线宽对谐振式光纤陀螺标度因数的影响[J].中国惯性技术学报,2020,28(01):89-93.
Si Q,Feng Z,Yu C,et al.Influence of Laser Linewidth on The Slope of Demodulation Curve of Fiber Resonator[J].Journal of Chinese Inertial Technology,2020,28(01):89-93.
[14]徐丹,卢斌,杨飞,等.基于3×3耦合器的窄线宽单频激光器噪声测量技术[J].中国激光,2016,43(1):26-32.
Xu D,Lu B,Yang F,et al.Narrow linewidth single-frequency laser noise measurement based on a 3×3 fiber coupler[J].Chinese Journal of Lasers,2016,43(1):26-32.
[15]蒋治国,胡宗福.谐振型光纤陀螺的灵敏度分析[J].中国激光,2017,44(07):311-317.
Jiang Z,Hu Z.Analysis on sensitivity of resonant fiber optic gyro[J].Chinese Journal of Lasers,2017,44(07):311-317.
