基于变弯度技术和协同射流的混合流动控制技术研究
2022-11-05陈其盛黄江涛聂胜阳张文琦
陈 诚,陈其盛,黄江涛,聂胜阳,张文琦,焦 瑾
(1. 中国空气动力研究与发展中心空天技术研究所,绵阳 621000;2. 西安理工大学土木建筑工程学院,西安 710054;3. 西安航空学院飞行器学院,西安 710077)
采用流动控制技术实现气动特性的改善是航空工程常用的技术手段。增升装置是典型的流动控制装置,在起飞阶段打开前缘缝翼和后缘襟翼,可以获得很大的升力系数。这类成熟的增升装置的特点是通过活动部件的张开,扩大机翼升力面的面积,增大翼型的弯度,同时将下翼面的相对高压气流引入上翼面用来推迟流动分离而实现的。然而,这类增升装置需要复杂的支持装置、导轨等机械部件,在大型运输机上才会采用,而对于小型飞机或者军用战斗机,往往采用简单的后缘变弯技术实现增升,即翼型上仅有舵面的偏转,或者一些新的概念增升设计,如前缘变弯或者后缘变弯设计[1-4]和柔性翼概念[5-6],这些新概念的设计都是在利用增加翼型弯度的方法增加升力的同时减少增升装置的复杂性。
然而,所有的变弯度策略都需要解决弯度增加带来的较大攻角下的流动分离所带来的阻力增加甚至失速问题。近年来,变弯度策略和主动流动控制策略配合压制分离是一个热门的研究领域。在高雷诺数流动中后缘变弯配合吹气是研究的比较充分的,发展出了不同的控制策略。RADESPIEL等[7],刘睿等[8]和WIERACH 等[9]在翼型内部布置气泵或者从发动机引气,对后缘进行吹气以控制分离,利用Coanda 效应使高速射流附着在表面上,推迟后缘较大偏转的襟翼上的分离,从而推迟流动失速。这类技术也被称为内吹式襟翼。另一类如NASA[10-12]针对方向舵和垂尾做的研究工作,采用扫掠式吹气技术(sweeping jets)为舵面偏转时舵面上的气流注入能量从而推迟流动分离。
而前缘弯度改变策略,代表性的有RADESPEIL等[7]提出的利用前缘下垂(Droop)实现增升的概念,前缘为可活动部件。前缘下垂可以有效增大前缘半径,改善低速流动特性,推迟失速。另一种是XING 等[13-14]研究的前缘可变蒙皮技术,利用可膨胀和收缩的蒙皮实现前缘半径的改变。
除了吹气实现主动流动控制之外,另一种有效地推迟或者消除流动分离、改善物体绕流的流动特性的技术是协同射流技术方案(Co-flow Jet,CFJ)。该技术最早由ZHA 等[15]提出的(如图1 所示),通过在翼型内部布置一个泵,从翼型后缘吸气,再从前缘附近的出气口高速射出;出气口和吸气口的气流速度方向均与翼型表面平行,因此该策略直接将高速气流注入边界层,给边界层注入能量,具有推迟边界层分离的作用,且高速射流裹挟主流流动加速,在翼型上形成额外的环量,具有大幅度增加升力、推迟翼型失速等增益效果。由于不需要从发动机额外引入气流,该技术属于无源主动控制技术。ZHA 等[15-16]的实验和数值模拟研究都表明,协同射流具有显著推迟流动分离、改善失速特性和提高短距起降能力的效果,可以将NACA0025 翼型的升力提升150%以上,因此该技术受到国内较多的关注,但在较薄的翼型上的应用研究还较少。
将协同射流技术同变弯度技术结合的研究目前不多,如史子颉等[17]将协同射流技术应用在垂直尾翼上提升舵效。为提升在大尺寸薄翼型的低速气动特性,在协同射流技术的基础上,研究后缘变弯和前缘下垂技术同时使用的混合控制方案,是有必要的。本文探索协同射流技术和简单的变弯度技术组成的混合流动控制方案的可行性,分析混合流动控制的控制机理和控制效果。后缘变弯和前缘下垂等带来的增升效果和很多几何参数有关,如可活动面的大小,偏转角度,前缘半径等,在本文的研究中,变弯度技术和协同射流主动流动控制技术的配合效率是研究重点。由于方案仍在探索阶段,采用计算流体力学工具进行方案论证,研究高雷诺数流动现象,探索物理机理和物理规律,是研究复杂流动的通用做法,如高超等探索相对厚度对风力机翼型这类高雷诺数流动的影响规律[18],李艺等[19]探索大型冷却塔的风毁问题,郑怡彤等[20]研究周边建筑对大型煤棚的风载荷体型系数影响。因此本文基于成熟的计算流体力学工具,对某大尺寸薄翼型,分别研究协同射流在无变弯度翼型、后缘可活动面下偏20°,前缘下垂20°以及前缘和后缘同时变弯的构型上的控制效果,所得研究结论可为高雷诺数航空工程的增升方案提供参考。
1 计算网格和计算方法
所研究基础翼型的基于弦长c的雷诺数Rec=1.1×107,该翼型最大厚度约为12%弦长,有四种不同的布局方案,如表1 所示。采用多块对接技术生成计算用的网格,用来更好地计算自由剪切层和分离区的位置。对于有无协同射流的构型,因翼面复杂程度不同,网格密度分布不同。图2分别展示了无协同射流装置的四种布局的网格,沿着流向方向和展向方向均布置了足够数量的网格。如对干净构型,绕翼型一周的网格为552 个网格点,第一层网格的高度为1×10-6c,物面附近网格的增长率为1.1,整体网格数量为40 992。
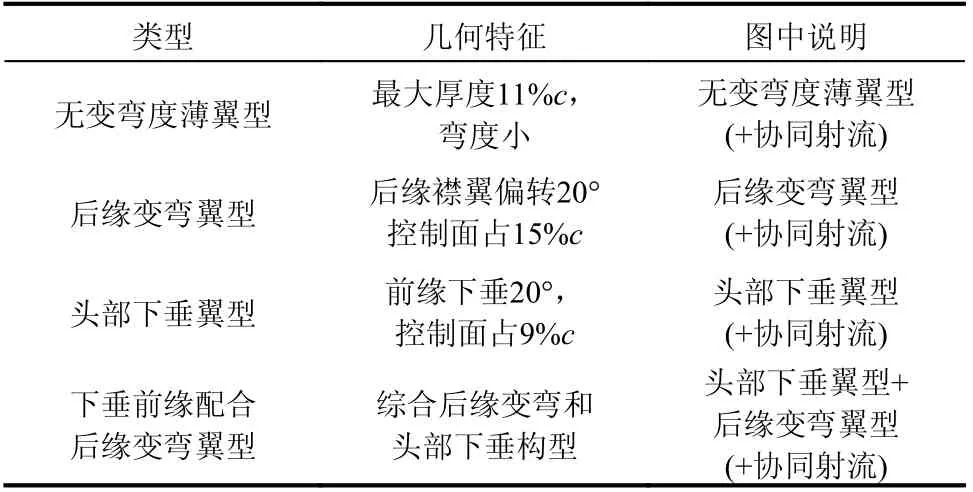
表1 四种布局的基本几何信息Table 1 basic geometrical information of four configurations
对协同射流方案,控制装置的射流出口位于离翼型前缘4.5%c处,高度为0.5%c。吸气口的位置位于离翼型前缘75%c处,尺寸为1.0%c。有协同射流的构型的网格分布如图3 所示。协同射流内部的射流管道和吸气管道也被计入计算域,用来更好地模拟射流出口和吸气口处的自由剪切层的发展状况。
本项目采用自研的非结构湍流计算开发平台进行计算分析。该程序求解雷诺平均Navier-Stokes方程(RANS),湍流的模拟采用航空工程中常用的SA 模型[21],空间离散格式为中心格式离散无粘通量,采用二阶Roe 格式计算湍流模型对流项。该程序在第一届空气动力学大会中对CHN-T1 标模上进行了系统的验证和确认工作[22]。
2 计算结果分析
为研究变弯度技术和协同射流配合的控制效果,所有计算的计算状态和计算方法都相同。而协同射流的控制效果和吹气动量系数有关。吹气动量系数越大,协同射流带来的总的控制效果就好。根据ZHA 等[15-16]的研究结果,协同射流的吹气动量系数并不是越大越好,应在一定的范围内。本文的协同射流吹气口内部管道的质量流量在所有的计算工况中都保持恒定,为7.14 kg/s,该方案得到的吹气口处的动量系数,在中等攻角时约为0.1。由于所有的方案中协同射流的布置方案完全相同,不同构型条件下射流产生的作用力基本相同,因此协同射流的控制效果用翼型表面积分得到的表面气动力就可以衡量。下文所有的气动力系数都是对翼型外表面的压力和表面摩擦力积分的结果。
2.1 无变弯度薄翼型
在单段翼无变弯度的构型上,计算出来的升力系数、阻力系数和力矩系数如图4 所示。无协同射流时,在攻角为17°时最大升力系数为CL,max=1.6914,之后翼型进入失速状态,随着攻角增加,阻力系数大幅度增加,升力系数大幅度下降,抬头力矩也迅速增加,且在此翼型上,计算得到的升力系数和薄翼理论得到升力系数理论值在失速前一致。而协同射流翼型上,最大失速攻角提升到22°,对应的升力系数为CL,max=2.5036,升力系数提升了ΔCL=0.8122。之后迅速进入流动失速,升力系数大幅度下降,阻力系数大幅度增加。二者对比可以看出,在较小的攻角下,翼型上都是附着流动,协同射流主动流动控制技术带来升力增加的同时也会带来阻力的增加。升力和阻力系数的增量都较小。但是对力矩系数的影响较大,在二维翼型上,协同射流带来了较大的低头力矩。随着攻角增加,在干净构型上开始出现流动分离,而协同射流具有显著的控制流动分离、推迟失速攻角的能力,如图5 所示。因此,协同射流技术在薄翼型上的主要效果表现在推迟失速攻角和提升最大升力系数上。而当流动都是附着状态的小迎角工况,协同射流对整体气动特性的影响不大,对力矩特性的影响比较显著。
而攻角达到22°之后,协同射流翼型进入前缘失速的状态,即前缘出现流动分离,流动分离区的尾迹向下游迅速扩大,如图6 所示,导致上翼面上的翼载下降,阻力增加,进入失速区域。因此前缘半径是制约协同射流在高雷诺数薄翼型上应用的关键因素。
2.2 后缘变弯翼型
图7 展示的是后缘变弯后,有无协同射流时得到的升力系数,阻力系数和力矩系数同无变弯构型的对比。可以看出,当后缘变弯后,带来的弯度变化,导致绕翼型的环量增加,零升迎角变小。当没有协同射流时,后缘弯度的改变带来升力系数在线性段范围的增量基本保持不变。因此可以推断:在薄翼型上,后缘变弯后的升力系数仍可以用薄翼理论进行预测,弯度增加带来零升迎角的降低。后缘变弯后,最大升力系数为CL,max=2.0564,对应的攻角为15°。和无变弯度构型相比,翼型表面的最大升力系数仅提升了ΔCL=0.365,失速攻角降低了2°。和协同射流配合后,后缘变弯协同射流构型最大升力系数达到CL,max=2.8783,对应的失速攻角为18°,带来的升力增量和失速特性都有显著的提高。达到失速后,协同射流后缘变弯翼型上的升力迅速下降。对阻力系数而言,在较小的攻角下,后缘变弯带来的阻力系数就有了显著的增加。这是由于后缘变弯带来的正的弯度增加,带来环量增加、升力增加的同时,也会带来显著的压差阻力的增加。对力矩系数而言,后缘变弯带来的低头力矩剧增,而协同射流方案进一步强化这一趋势。
图8 展示随着攻角从12°增加到16°时后缘变弯翼型上的空间流线和马赫数分布云图。可以看出,在较小的攻角(如12°)时,后缘变弯的翼面所在的区域就出现了流动分离和较大的低速尾迹区。在16°攻角工况,后缘变弯的薄翼型上流动在主翼上完全分离,表明在这类翼型上,副翼上的分离不是导致翼型失速的原因,而主翼上的大范围分离是导致此类翼型失速的原因。
图9 展示的是当增加协同射流后在12°和16°时的空间流线和马赫数分布云图。在12°工况,后缘变弯的副翼上的低速尾迹区的范围明显减小。在16°工况,协同射流很好地控制了主翼上的分离,整个翼型表面都是附着流动,且前缘附近的流速快,翼型头部上存在很强的负压。
当攻角进一步增加到20°,如图10 展示,在翼型前缘出现了较小的流动分离,位于协同射流的吹气口的上游,该分离情形和无弯度构型上应用协同射流的效果一致。前缘分离形成低速尾迹区向下游快速扩展,在整个翼型上的流动区域形成了绕翼型的低速流动区,降低了绕翼型的环量,从图7 的升力系数上看,协同射流翼型在此攻角开始失速。因此二维后缘变弯协同射流翼型和无弯度的协同射流翼型一样,失速的原因都是因为前缘头部半径小导致翼型前缘无法承载更大的负压峰值,导致流动在前缘分离进而使主流上的尾迹迅速扩大,最终发生失速。
2.3 头部下垂翼型
图11 给出头部下垂,前缘变弯后有无协同射流时得到的升力系数,阻力系数和力矩系数同单段翼无变弯构型的对比。可以看出,前缘下垂带来的无协同射流构型上的升力和阻力系数在0°到12°范围内几乎没有变化。而在-4°,前缘下垂带来了升力系数和阻力系数的性能恶化。当攻角超过12°,下垂前缘的构型,升力系数更大一些,失速攻角由无变弯构型的17°增加到18°,推迟了1°,前缘下垂带来了气动特性的改善。最大升力系数增加到CL,max=1.8144。而对力矩特性而言,前缘下垂导致在较小攻角时的力矩为低头力矩,较大的攻角下力矩为抬头力矩,导致力矩特性变复杂。而有协同射流后,前缘下垂构型带来的升力系数和无前缘下垂的协同射流翼型的表现相当,但是升力系数并没有重合。前缘下垂带来的失速攻角有显著的增加,达到28°,对应的最大升力系数为CL,max=2.8960,这两项数据较无弯度变化的协同射流翼型相比,失速攻角增加了5°,最大升力系数增加了0.3924。
图12 展示前缘下垂构型的空间流线和马赫数分布云图。在18°时,后缘出现了较大的流动分离,对应着流动失速。随着攻角增加,分离点向上游移动。而图13 展示的是18°和22°时协同射流配合头部下垂的空间流线和马赫数分布云图。协同射流很好地控制了流动分离,前缘头部上的流动加速更快,吸力峰值更大。而当攻角增加到28°和30°时,如图14 所示,对应着协同射流头部下垂翼型开始失速。从空间流线看,翼型头部的流动仍然是附着流动,没有出现无下垂前缘协同射流构型上出现的前缘分离问题。而翼型上表面流场出现较大范围的低速流动区,表明在此质量流量下,流动失速是由后缘分离导致的。根据此流场特征可以推测,若进一步增加协同射流的质量流量,增加射流出口动量系数,可以进一步带动主流,推迟后缘分离,推迟失速的发生,获得更大的升力系数。
2.4 下垂前缘配合后缘变弯翼型
图15 展示的是头部下垂配合后缘变弯的构型在有无协同射流时得到的升力系数,阻力系数和力矩系数同单段翼无变弯构型的对比。可以看出,前缘下垂带来头部半径增加,失速迎角增加。而后缘变弯带来弯度增加,环量增加和零升迎角下降,增升效果显著。二者配合后,带来的总的升力系数增加到CL,max=2.3304,对应的是失速攻角为18°。和仅有后缘变弯构型相比,失速攻角提升3°,最大升力系数提升ΔCL=0.2740。相比无弯度构型相比,失速攻角增加1°,最大升力系数提升了ΔCL=0.6390。而有协同射流配合后,最大升力系数增加到CL,max=3.3157,对应的失速攻角为24°。相比无协同射流的前缘下垂配合后缘变弯,升力系数的增量为ΔCL=0.9823。
图16 展示的有无协同射流时,在不同攻角下的空间流线和马赫数分布云图。当没有协同射流时,后缘变弯的区域上就出现了一定程度的流动分离。随着攻角增加,分离范围扩大。而协同射流有效地推迟了翼面上的分离,增加了头部的绕流流速,增加了升力。
图17 展示在失速攻角附近,协同射流变弯度翼型上的马赫数分布云图和空间流线分布。可以看出在此构型上,没有出现前缘分离,翼型失速的主要原因仍是后缘流动分离和翼面上的低速流动,因此,可以通过进一步增加协同射流的吹气质量流量控制主翼面上的分离,获得更大升力。
2.5 数据汇总
将四种不同翼型及其配合协同射流后的气动特性,包括失速特性,增升特性等数据见表2。

表2 四种布局的气动特性信息汇总Table 2 Summary of the aerodynamic performance of four configurations
3 结论
基于计算流体力学方法,在相同的飞行工况和相同的协同射流布局几何参数和质量流量下,在高雷诺数薄翼型上进行的简单变弯度设计,并与协同射流主动流动控制技术配合,对混合控制的控制效果、失速机理进行了计算研究,计算结果见表2 汇总,其中无协同射流的无变弯度薄翼型为基准翼型,主要结论如下:
(1) 在薄翼型上采用协同射流可以带来升力的增加,推迟薄翼型上的流动失速;但仅能将失速攻角推迟5°左右。限制协同射流薄翼型控制效果的主要原因就是头部半径小引起前缘分离。
(2) 采用后缘变弯度设计,增加了绕翼型的环量,降低了翼型的零升迎角,但是导致失速攻角提前,大幅度增加低头力矩。而配合协同射流后,最大升力系数和失速迎角都得到了较大幅度的改善,低头力矩更大。限制后缘变弯配合协同射流控制效果的主要原因仍是头部半径小带来的前缘分离。
(3) 采用前缘下垂的变弯度设计,可以有效地增加翼型的头部半径,推迟失速攻角。而配合协同射流后,失速迎角可以推迟11°,失速类型为后缘分离导致失速,意味着可以承受更大的射流质量流量并获得更大的气动增益。
(4) 对不同弯度构型,协同射流技术本身带来的升力增量接近。采用前缘下垂配合后缘变弯技术、协同射流技术,可以综合三种技术方案的优势,是在薄翼型上推荐的最优混合控制方案。在吹气动量系数为0.1 条件下,该方案薄翼型的最大升力系数提高到CL,max=3.3127,增升96%。后续可通过优化变弯度的方式、吹气质量流量,射流装置的几何尺寸等进一步提高混合控制的效果。