基于声学可视化的GIS击穿定位系统研制及应用
2022-11-02马径坦杨景刚刘咏飞
赵 科,马径坦,杨景刚,高 山,刘咏飞,王 枭
(1.国网江苏省电力有限公司电力科学研究院GIS设备运维检修技术实验室,江苏南京 211100 ; 2.上海睿深电子科技有限公司,上海 200237)
0 引言
相比于传统敞开式开关,气体绝缘金属封闭开关设备(gas insulated switchgear,GIS)凭借其安装简单、占地空间小、整体式模块化、运行安全可靠等优点被广泛应用于电力系统[1-2]。GIS设备由于制造工艺参差不齐、运输过程中存在磕碰、现场安装操作不当等原因会导致设备出现绝缘损伤,若不能及时排除上述缺陷,则缺陷会变为放电通道,最终导致设备击穿[3],因而GIS在投入运行前需要对其进行交流耐压试验以保证设备的绝缘强度满足使用标准。
主要的耐压定位技术包括超声波法、振动法、接地电流法[4]。随着电压等级的提升,站内GIS设备的长度随之增加,上述耐压定位技术的接触式检测特点使得现场定位工作变得极为繁重;此外,登高作业也增加了现场安全风险[5]。
GIS击穿时,除绝缘强度发生变化以外还会辐射声音信号,因此试验人员可以听声辨位,但这种方法需要大量人力,并且还需要进行多次加压试验,通过人耳听声定位也极易受到主观因素的影响,故而难以达到期望的定位效果[6-7]。
可听声信号通过空气传播,因此基于可听声的声学定位方法通过非接触方式布置传感器,可与被测设备保持相互独立,测量方式简单高效,而基于传声器阵列的可视化定位技术则进一步地克服了单个传声器易受外界环境干扰、分辨率差的缺点,在航空航天、轨道交通等领域得到了广泛应用。传统的声学定位技术根据定位原理可将其分为3类[7]:首先是基于最大输出功率的可控波束形成技术(Beamforming)[8-9],它的基本原理是改变各传声器接收信号的权重来引导该波束导向声源的可能位置,使得传声器阵列的输出功率最大化,则功率最大化的方向即为目标声源方向[10]。其次是高分辨率谱估计算法[11-15],该算法对传声器阵列采集的信号进行谱估计计算,获取2个相互独立的信号子空间和噪声子空间,利用噪声子空间与目标声源方向矢量的正交关系即可获取声源位置。最后是基于时延估计(time different of arrival,T-DOA)的定位算法[16],根据传声器阵列的空间分布位置获取声源到达各阵元的声延迟T-DOA,并以此计算声源与各阵元的距离差,反推出期望声源的位置。相较于T-DOA和Beamforming,谱估计法的定位精度更高,信号失真程度较小。谱估计法需要对数据的协方差矩阵进行分解获取子空间,这要求信号是统计平稳的,但实际情况下,数据包含了期望信号和背景噪声,影响了声学定位的精度。Beamforming包含了自适应波束形成和常规波束形成,相较于前者,常规波束形成不受先验知识的局限[17],在算法稳定性、计算效率等方面都表现出更好的性能,而基于常规波束形成的互功率谱波束形成方法通过求解扫描点的互功率谱,可以有效抑制现场噪声,进而在低信噪比的情况下实现定位。
本文开展基于传声器阵列测试技术的GIS击穿定位方法研究,采用互功率谱波束形成方法计算击穿位置坐标,结合可见光图像形成可视化定位结果,基于上述原理研制了声学可视化GIS击穿定位系统,并在现场进行了测试应用,成功识别出了击穿位置。
1 声学可视化击穿定位原理
1.1 波束形成原理
波束形成的本质为空域滤波器,该方法通过设置一组滤波器加权向量,利用延时补偿的方法将传声器阵列各阵元输出信号进行加权运算,形成聚焦方向,当聚焦方向指向实际声源位置时即可取得最大输出。由此可根据寻取输出最大点的权重反推出声源波达方向,获取声源位置。波束形成分为平面波和球面波,在实际的GIS击穿定位检测中,由于测点与GIS位置较远,声场模型为远场模式,远场波束形成原理如图1所示。
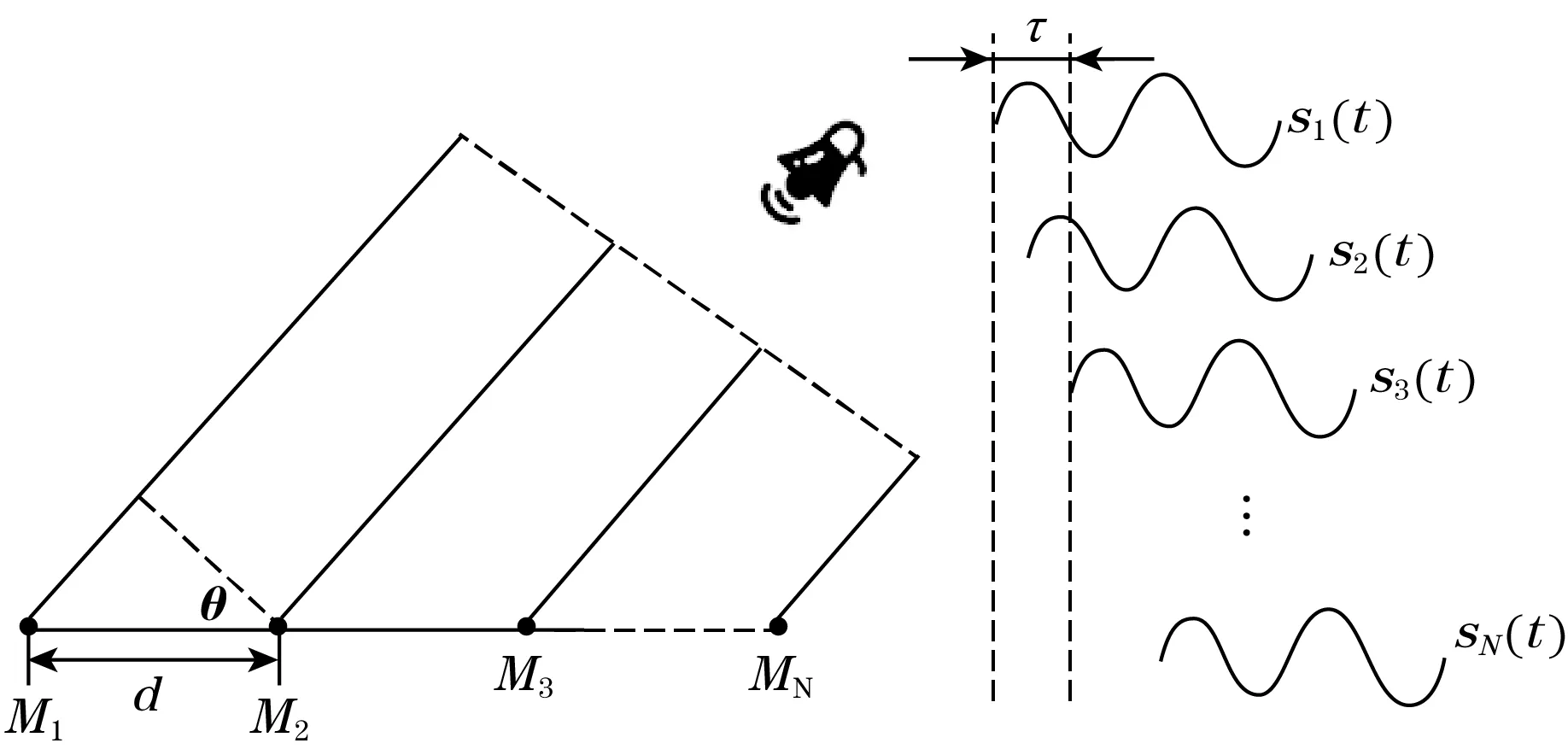
图1 远场波束形成原理图
假设传声器阵列中有n个阵元,在远场有一声源S,通过平面波的传播方式,将声信号辐射至各阵元,则有波束形成的输出:
(1)

1.2 互功率谱声学定位原理
在常规波束形成中,当阵列的聚焦方法与实际声源位置保持一致时,输出最大时形成主瓣,其余则形成旁瓣[18],而旁瓣的存在对于声成像结果影响很大。而互功率谱波束形成声学定位可以有效抑制旁瓣,增加定位精度。对波束形成输出求互功率谱:
(2)
式中Cni为阵元n与阵元i输出信号的互相关矩阵,其表达式为
(3)
式(2)可以将互相关矩阵拆解为自功率谱项和互功率谱项相加的形式:
(4)
传声器阵列检测到的信号包含了期望信号和噪声信号,由于期望信号的一致性与噪声信号的差异性,各阵元接收的期望信号具有较大的相关性,而噪声信号间保持不相关性。式(4)中自谱项包含了期望信号与噪声信号,而互谱项中不相关的噪声相互抵消,仅保留期望信号的互功率谱,基于此可以剔除自谱项以减少不相关噪声的影响,最终得到去自谱项的互功率谱输出:

(5)
当延时向量τn与实际波达方向所对应的延时向量相重合时,互功率谱波束形成输出V′(τ,ω),即达到最大值。
1.3 声学可视化定位原理
声学可视化定位技术,通过测量得到麦克风阵列中各阵元的相位差异,依据互功率谱声学定位原理,进而得到该空间中的声源位置及声压强度分布,形成待测对象基准发射面二维波束等高线图谱,其中等高线的颜色和亮度代表声源的强弱。同时记录测量时的可见光图像,通过坐标系的映射关系,将二维波束等高线图谱中的每个坐标点与照片中的像素点相对应,进行视听融合,形成声学可视化结果,如图2所示。该技术将一维抽象数据转化为图像形式,直观、实时展示出来,更加有效地显示声学信息和检测对象之间的时空间分布、组合和联系,有利于发现其变化规律。

图2 声学可视化定位原理图
2 声学可视化击穿定位系统设计
2.1 系统总体设计
GIS声学击穿定位系统由显示层、通讯总线(光纤交换机、光电转换器及光纤)、子网层(无线网桥、声学可视化定位装置)组成,系统结构如图3所示。图中,声学可视化定位装置布置在靠近GIS的位置,无需接触,可以实时监测并记录耐压试验过程中GIS设备发生击穿后的可听声信号,并快速计算出幅值、特征值、定位坐标等结果,通过无线或有线传输模式将原始数据和计算结果传输至子网层的无线网桥。所有测点的数据将由无线网桥经由通讯总线实时同步上传至显示层监控平台。

图3 声学可视化击穿定位系统结构图
2.2 硬件系统设计
当前的声源定位系统具有价格昂贵、操作复杂、功耗高、安装难度大等缺点,而基于FPGA的硬件采集系统弥补了这些缺陷,其凭借便于携带、低功耗以及成本低等特点,在户外或某些特定的环境中展现出了很高的应用价值。采用FPGA作为数据处理平台,配合64路同步数字式采样电路构成了一款集信号采集、数据处理和结果显示的便携、低功耗、小体积以及易扩展的声源定位系统。通过64个MEMS传声器接收外部的声音信号,量化后以24位并行的形式传输到FPGA的同步动态随机存取内存(synchronous dynamic random-access memory,SDRAM)中,对于这一部分数据,可直接存储到SD卡中供后续的处理使用,也可由FPGA对其进行声源定位算法计算,并将计算后得到的定位结果、频谱信息通过无线或有线方式传至监控平台显示。
声学可视化定位装置采用一体化设计,如图4所示,传声器阵列、光学相机、数据采集单元、数据处理单元、电源模块以及网关模块集成在一起,有效提高了装置的便携性及稳定性。装置实物如图5(a)所示,传声器阵列上共有64个数字式传声器,传声器的测量范围为20 Hz~24 kHz,采用同心圆结构布置,图5(b)为阵列在5 000 Hz频率下的阵列响应,其-3 dB瓣宽为4.68°,最大旁瓣级为-23.46 dB,具有较高的分辨率和抗干扰能力。采用MEMS传声器采集数据,传声器采用由基板和封装盖组成的空心封装结构,并在收音孔上覆盖了一层防水透声膜,使得最终的定位装置具有了一定的防水能力,在户外使用中有了更好的环境耐受度。

图4 声学可视化定位装置结构框图


图5 声学可视化定位装置
2.3 软件系统设计
定位系统中控软件基于JavaScript编程语言开发,运行在显示层主机系统上,用于实现定位装置的远程操控、击穿数据分析及定位结果的查看。软件主程序流程如图6所示,系统开始工作时,下发指令连接设备网口并进行初始采集参数配置,可采用单独或统一方式设置检测距离、成像频段、动态范围、数据记录模式等,采集参数设置完成后即可启动采集命令,接入相机及声学数据,数据处理单元通过FPGA计算得到声学成像结果,在网关程序里将相机画面与声学成像画面合成一路视频流,用于实时监控。网关程序同时对采集单元传输的一路原始音频数据进行瞬时声压级的计算,在击穿发生后提取出所有定位装置击穿瞬间的声压级数据,并依次进行量级排序,选取出最大声压级对应的装置作为击穿信号捕捉测点,调取其声学可视化数据结果,找到击穿位置。
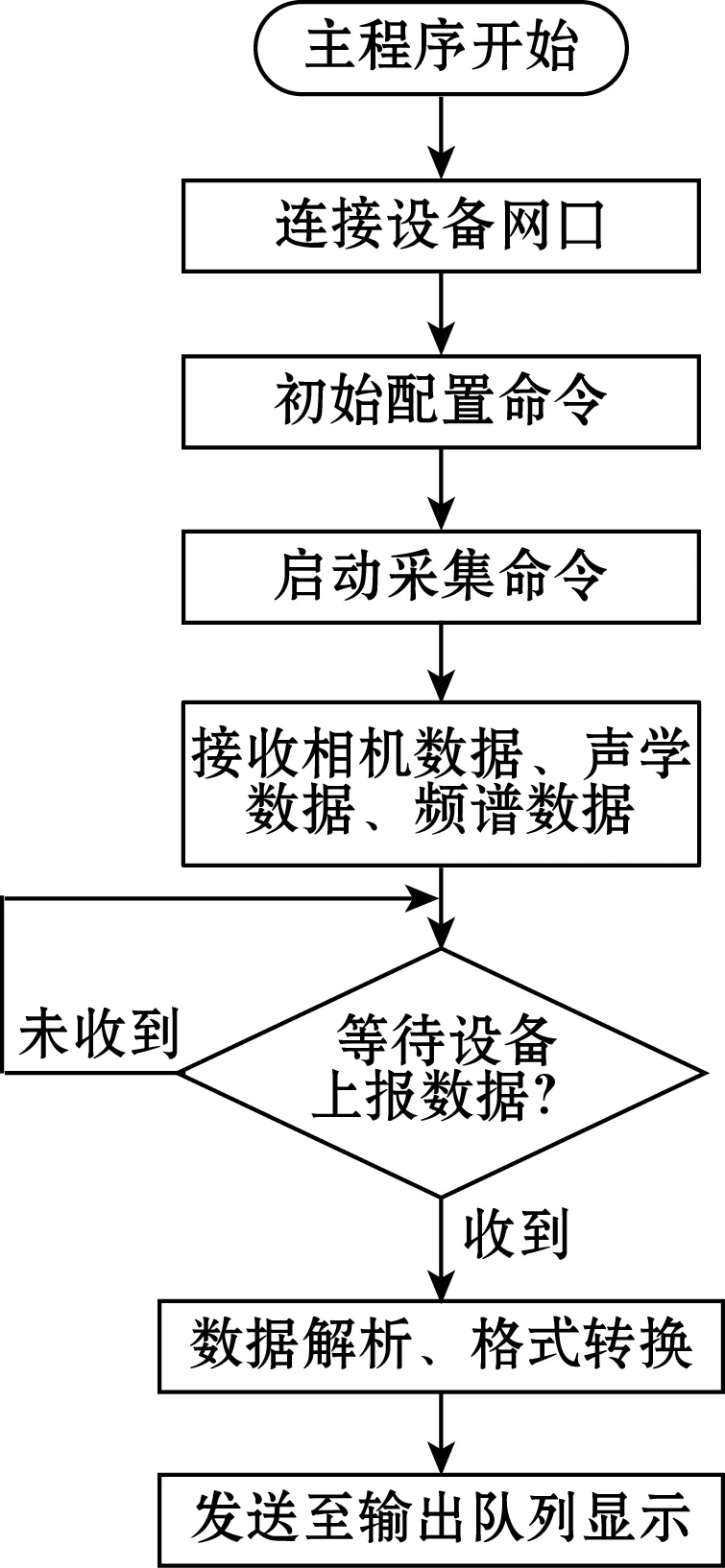
图6 击穿定位软件主程序流程图
考虑到试验现场的无线局域网可能在击穿冲击等情况下发生中断,而在中断后需要等待中控程序与网关程序能够建立稳定连接的情况下,再把网关上保存的数据文件上报给中控程序,因此网关模块在缓存里默认存储了5 min(最长可调为30 min)的数据,在中控程序重新连接后进行数据查询。考虑到系统会利用多个定位装置对击穿过程进行观察,为了对来自各个装置的数据进行比对,要求对各相机的时间进行对齐,即指定时间轴上的某个特定时间点,能够提取当前时刻采集得到的相机画面与声学成像等数据帧信息。为此,在网关设备上安装了NTP客户端,在中控主机上安装了NTP服务端。在每次实施多机联合采集之前,对所有网关设备发送命令,要求其进行一次NTP时间校对操作。
定位系统中控软件监控主界面如图7所示,主要分为定位结果分析、参数设置、监测单元选择3个模块,监测单元选择部分可以勾选需要查看的定位装置,参数设置模块内可以进行成像频段、测试距离等采集和分析参数的设置,定位结果分析模块内可以进行不同装置成像结果的查询、回看以及导出。
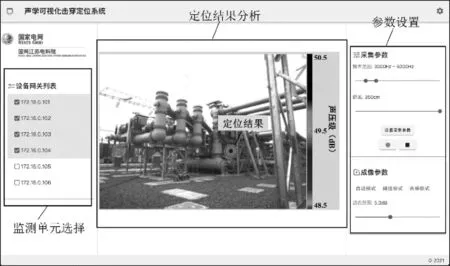
图7 击穿定位软件监控主界面
3 试验分析
为了验证系统有效性,并规范现场测试流程,在实际场地开展了试验研究,测试对象为一台550 kV的GIS设备,如图8所示,试验中在击穿点处导体上设置尖端放电模型,逐步加压至该处发生击穿,加压梯度为5 kV,试验中GIS内部未充绝缘气体,故多次击穿电压均在80 kV以下。

(a)试验方案示意图

(b)现场布置图8 试验布置图
击穿声信号时频域图谱如图9所示,从其时域波形特征可以看出,在击穿发生瞬间(7.582 s)出现一个较大的脉冲,声压瞬间达到了0.257 8 Pa,随后立即衰减,整个衰减过程呈现明显的振荡特征,与其在GIS内部的传播途径相关。时频域波形特征可以看出该击穿信号具有宽频特征,能量在整个测试频段近似均匀分布,能量显著高于周围的背景噪声。

(a)时域波形
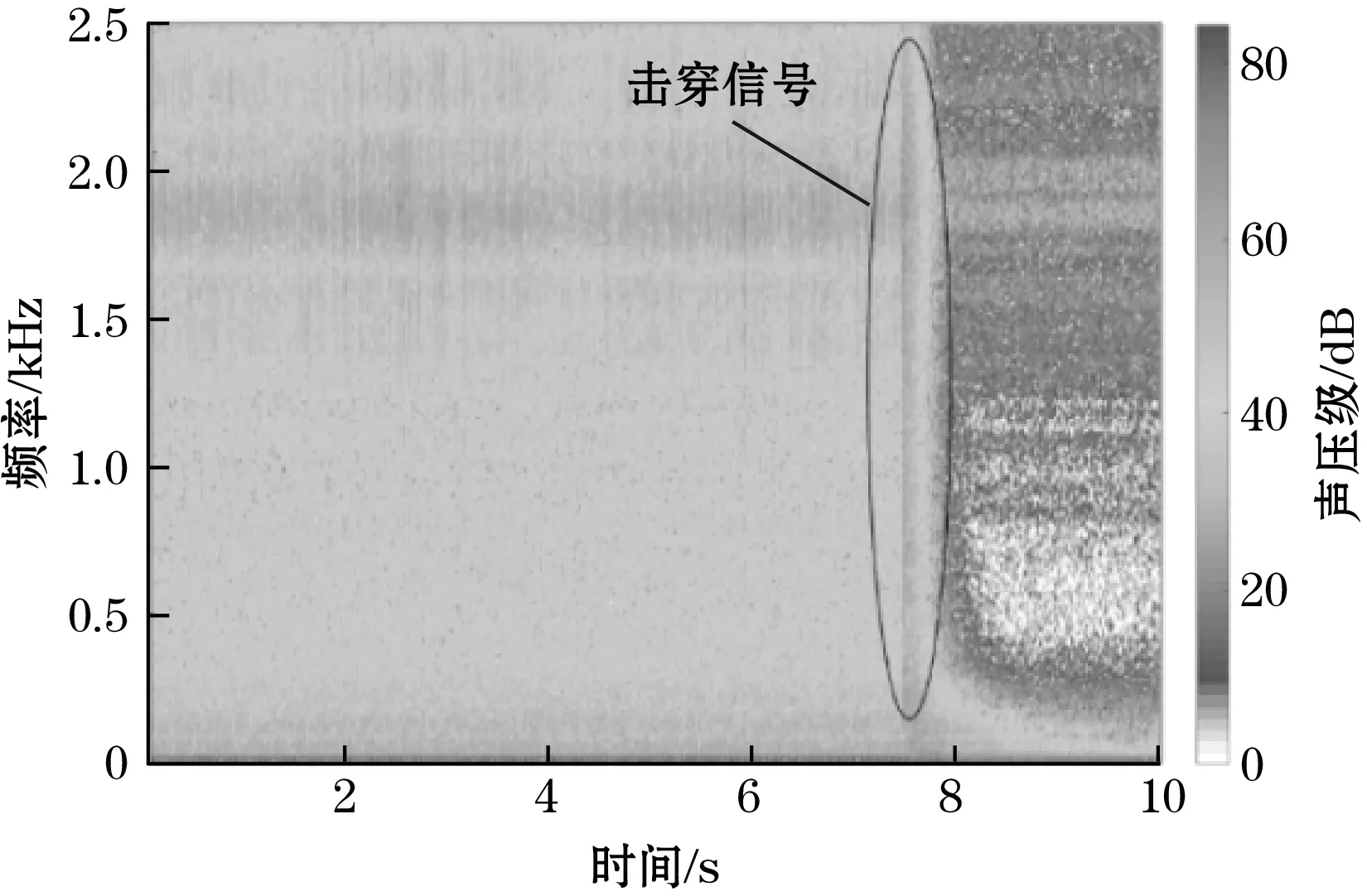
(b)时频域波形图9 击穿声学信号时频特征
3.1 测试频率对定位的影响
由图9可知,击穿声信号特征频率覆盖了整个测试频段,因此理论上在定位计算时选择任意频段均可,但是受限于波束形成原理,成像效果会受到传声器阵列拓扑结果影响,通常低频定位需要更大尺寸的阵列,而高频定位需要更高密度的传感器,经过消声室测验,本文定位装置的有效成像定位范围指标为1~24 kHz。除此之外,成像定位效果会受到特征信号信噪比的影响,现场环境中的背景噪声主要来源于加压装置的放电声,如图10(b),背景放电信号也是宽频信号,并且在高频(大约1.5 kHz以上)更为明显,故而在该频段内击穿信号信噪比会变差,如图10所示,当定位频段为15~20 kHz时,定位结果出现了干扰虚像,影响定位精度。因此在现场选择定位频率为1~15 kHz,但声信号随着频率增加衰减也变快,现场测试距离通常大于2 m,优先选择1~5 kHz的低频段。
(a)1~5 kHz定位结果
(b)15~20 kHz定位结果图10 部分频段定位结果
3.2 测试方位对定位的影响
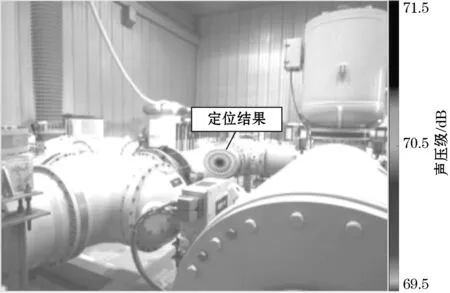
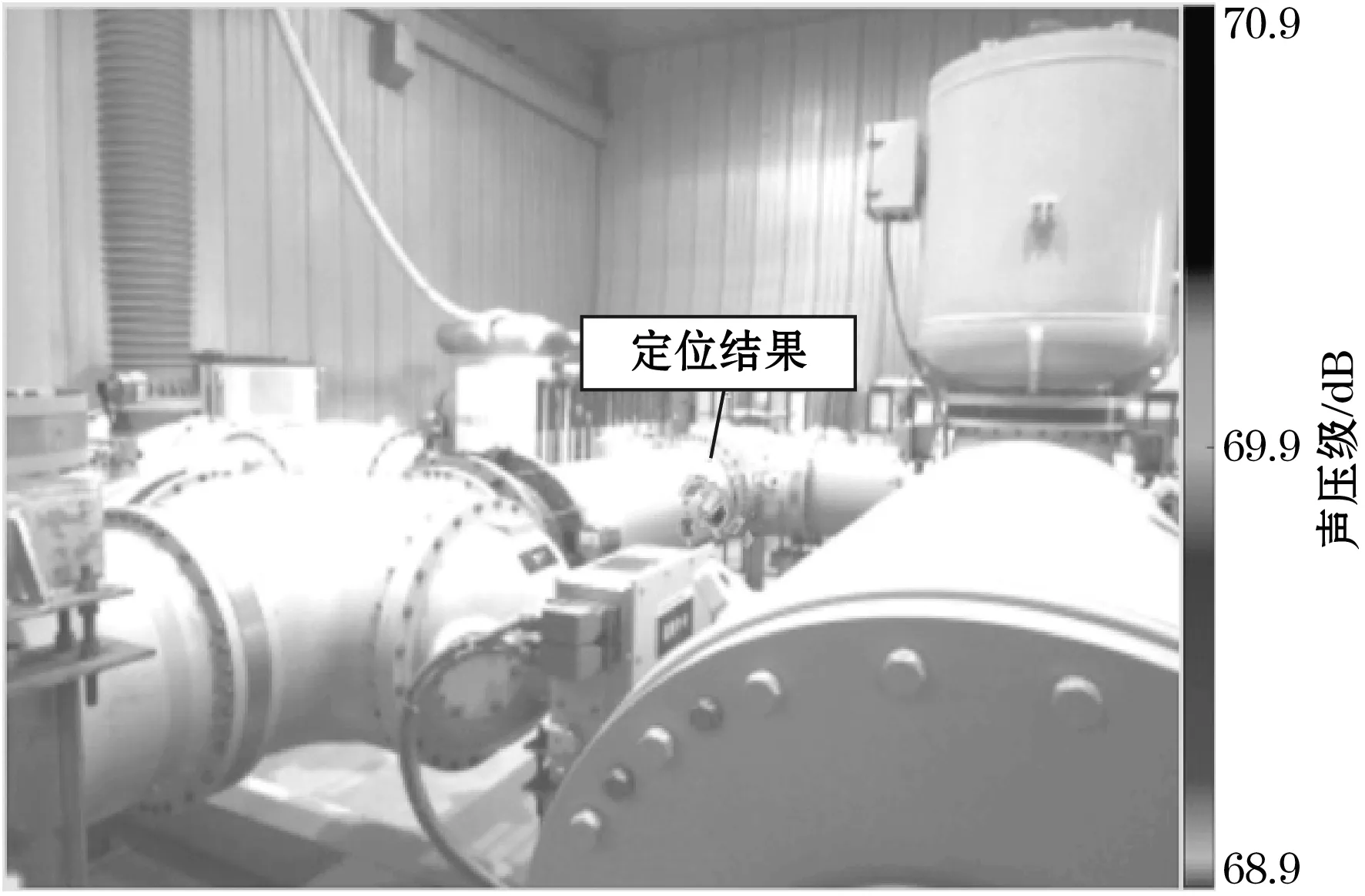
3个测点下的定位结果如图11所示,均可以较为准确的定位出击穿位置,但相较于测点1、测点3,测点2由于击穿点与定位装置之间有GIS母线遮挡,定位效果并不直接,容易出现误判。由于声成像技术测的是直达声场,故现场布置测点时应避免装置与被测设备之间有封闭性遮挡,而对于处于内侧的GIS结构,可将测点靠近,或者增加测点从多个角度交叉定位,以免误判、漏判。综上,现场测点布置时主要通过装置上自带的摄像头进行选择,基本准则是最终装置监控画面内能够覆盖掉所有试验段,并且尽量避免遮挡,对于装置视场难以兼顾的死角位置则可以通过单独增加定位装置进行补充。
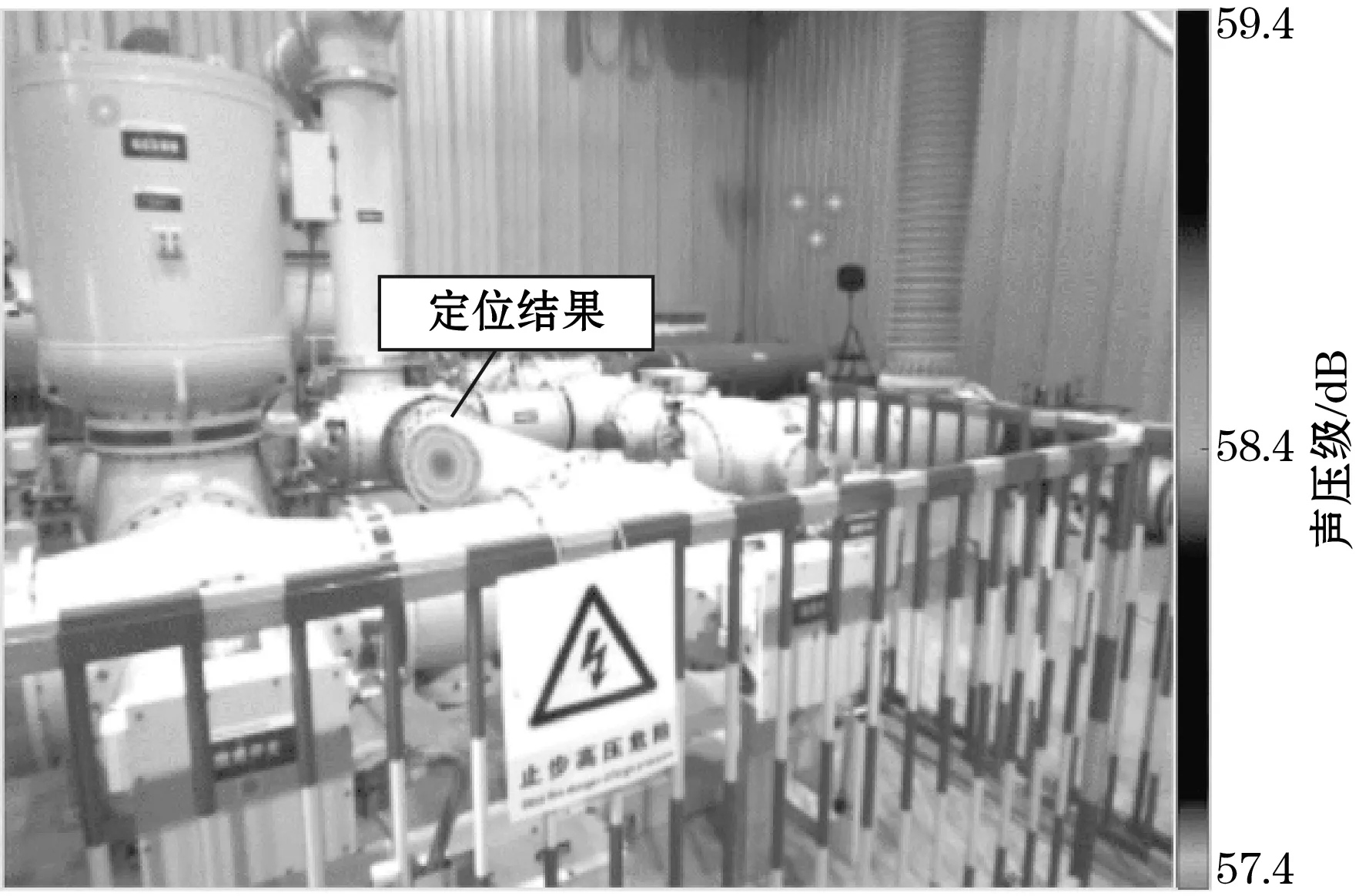
(a)测点1定位结果

(b)测点2定位结果

(c)测点3定位结果图11 不同测点定位结果
4 现场应用
4.1 布置方案
某新建550 kV GIS设备安装及常规试验合格后,根据相关规定和标准对其进行交流耐压及局部放电检测试验,检查其绝缘性能是否良好,耐压试验中首次采用声学可视化击穿定位系统进行了定位监测,现场布置方式如图12所示,沿着试验段依次布置了4个定位装置,装置距离GIS设备约8 m,装置相距15~20 m。

图12 定位装置现场布置图
4.2 定位分析
550 kV GIS A相在升压至720 kV时发生击穿放电,现场布置的声学可视化定位装置迅速且准确地定位了击穿所在位置——位于出线套管下方的盆式绝缘子处。如图13所示,通过现场的声压级监测曲线可以明显地看出,在发生击穿后各测点的声压级都有瞬间升高趋势,其中1号测点的幅值跃升最为明显,梯度差达到了37.726 dB,通过这个特征可以快速筛选出距离击穿位置最近的测点为1号,进一步调取其数据进行可视化定位分析。

图13 各测点声压级曲线
对1号测点装置数据进行了定位分析,成像频段选取1~5 kHz,定位结果如图14所示,非常直观的定位到出现击穿的盆式绝缘子处。

图14 可视化击穿定位结果
对定位结构进行了解体分析,如图15所示,拆解下来的盆子上有明显的击穿放电痕迹,验证了系统的定位准确性。

图15 现场解体照片
5 结束语
本文采用声学可视化技术,开展了GIS耐压击穿定位方法研究,具体研究成果如下:
(1)通过分析可视化击穿定位原理提出了声学可视化击穿定位系统设计方案,研制了相应的击穿定位装置及平台侧的监控软件,整个系统通过无线方式进行指令交互及数据传输,并且定位装置采用非接触布置,移动方便,极大提高了现场测试效率。
(2)现场应用表明该系统可以直观准确地定位出击穿位置,有效改善了耐压试验定位工作中测点布置难、工作周期长、定位精度差、误判几率大等问题。
