玻璃外墙智能清洗机设计
2022-11-01苏阳陈杰张航周倪敏黄朋辉
苏阳,陈杰,张航,周倪敏,黄朋辉
(201620 上海市 上海工程技术大学)
0 引言
伴随着社会经济的不断发展,城市高楼群不断扩大,以玻璃为主要型材的百米楼群屡见不鲜。玻璃长期曝露在阳光下、经受风霜雨雪难免污浊,美观起见需要定期对楼宇玻璃外墙进行清洗。目前高楼外墙的清洁仍由“蜘蛛人”上墙或搭乘缆车清洗,对工人而言,长时间高空作业不仅危险,而且效率低。另一方面,从事一线清洁的工人年龄处于40~55 岁之间,30 岁以下青年人鲜有从事这一职业。若干年后,将面临清洁行业人力短缺。为解决以上问题,楼宇清洁行业迫切需要一款清洗效果好、安全可靠、智能高效的玻璃外墙清洗机[1]。
1 整体思路设计
玻璃外墙清洗机主要由升降机构、清洗平台、配重系统三大独立的部分组成[2],玻璃外墙清洗机整体思路设计如图1 所示。卷扬机通过钢丝绳牵引升降机构,实现清洗平台在玻璃墙面的竖直方向运动。清洗平台内部装有喷淋系统、旋翼和越障轮结构,可分别实现清洗、越障功能。

图1 玻璃外墙清洗机整体思路设计Fig.1 Overall idea design of glass exterior wall cleaning machine
为减小清洗平台在百米高空因气流扰动产生侧偏,配重系统由配重小车搭配2 根尼龙绳可有效解决上述影响。清洗机总体以交流电源形式供电,摆脱对蓄电池续航安全和续航能力的困扰。由输电管和输水管组成的水电集合管为了防止因牵引力过大出现管壁撕裂,不与钢丝绳集成,独立从升降机构的顶端圆环处接入,沿玻璃外墙面直下,至清洗平台的左侧面进入平台内部。此外,清洗机上方安装有监视功能的探头,操作员可全天时监控清洗机的工作姿态以及清洗工况。
2 整体的结构设计
2.1 升降机构
清洗平台在玻璃墙面上下移动是依靠升降机构钢丝绳牵引实现的[3]。如图2 所示。卷扬机作为升降机构的主要单元,为清洗平台在竖直方向的运动提供动力支撑。升降机构的底部安装有自锁结构的万向轮,可在楼宇阳台的铺设面上实现水平横移。清洗平台的水平横移依靠升降机构和配重小车的主动横移,配合钢丝绳的牵引以及2 根软导轨的固定作用完成清洗平台的被动横移[4]。

图2 清洗平台竖直及水平移动Fig.2 Vertical and horizontal movement of cleaning platform
2.2 清洗平台
玻璃外墙清洗平台内部主要由清洗单元和越障单元组成。
清洗单元中,远程控制端以电信号传输的方式将配置好浓度的清洁剂由平台内部的清洁剂箱通过液压泵抽取,依次通过溢流阀、单活塞杠杆和电磁阀,最终以一定的速率从喷嘴中喷向墙面。清水从平台内部输出的方式与清洁剂基本相似[5]。在清洗工作中,通过遥控信号,先使清洁剂向外喷洒,达到软化玻璃表面污渍的作用,在一定的时间间隔后,使用清水对墙面污渍进行全面喷洗,并且远程控制三盘刷对墙面进行二次刷洗。这种水剂分离及刷洗的结构,一方面发挥出清洁剂本身浓度的最优效果;另一方面经过清水和三盘刷的强力清洁,墙面可以更加洁净[6]。清洗流程如图3 所示。

图3 清洗流程示意图Fig.3 Cleaning process diagram
清洗机的越障单元由四旋翼结构和雪橇式排轮组成。四旋翼无人机按照定义的前进方向设置成“X”型结构[7],如图4 所示。这样设计的目的是,当4 个旋翼旋转速度相同时可以抵消每个旋翼产生的扭矩,使作用于清洗平台的气流形成的推力作为吸附力,从而实现清洗机器在作业区的有效贴合。四旋翼倾转无人机技术的动力输出装置为2 对相反螺纹座的直流无刷电机,分别通过四电调以单片机闭环系统加以控制[8]。

图4 旋翼“X”型结构示意图Fig.4 "X" type structure of rotor
雪橇式排轮的结构是以点式接触的方式先与墙面突起的障碍物碰触,再转由面式滑动移向另一个滚轮,如此重复下去,移至末端的滚轮,即可完成对墙面突起障碍的越障,这种结构使得整个系统智能且高效。图5 所示为清洗机外观结构示意图。
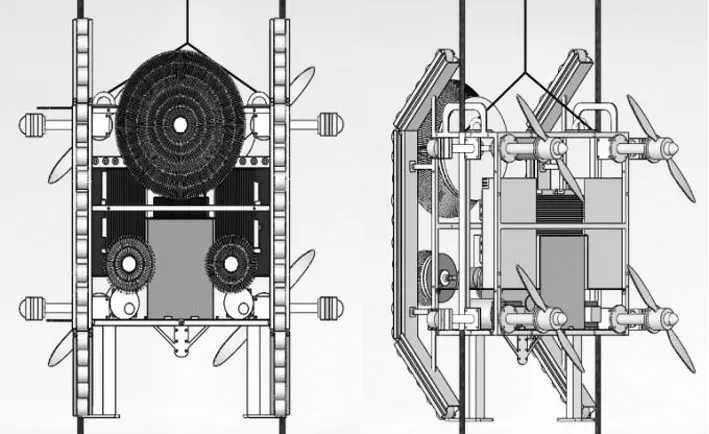
图5 清洗机外观结构示意图Fig.5 Appearance structure of cleaning machine
3 控制系统与视讯监视系统
清洗平台控制模块是STM32F103ZE,144 引脚,512 K FLASH 的单片机[9],其系统内核为32 位的ARM 处理器,主频72 MHz 工作频率,在存储器的0 等待周期访问时可达1.25 DMips/MHz,其闪存程序储存器为64 k,拥有37 个快速I/O 端口,所有的I/O 口可以映像到16 个外部中断,完全适用本智能清洗机的开发。整个系统的控制系统电路图如图6 所示。

图6 整个系统的控制电路图Fig.6 Control circuit diagram of whole system
整个平台运行操作中,视讯监视系统相当于人的第3 只眼,可以精确地观察清洗平台的工作近景,碰到异常状态时可及时将信息反馈到手机终端,被操作工人接收。该型摄像头具备可吸附性、超清像素、内置电池、红外夜视、移动侦测、循环录像等多重功能。同时具备150°广角镜头,可有效减少盲区,既可通过4G 网络,也可连接WiFi,可直接将信号传递到手机终端。
整台机器经过机械加工、安装调试以及外场测试,验证了本次设计的清洗机机械系统和控制系统的可行性。图7 所示为清洗机样机外场测试图。

图7 清洗机样机外场测试图Fig.7 Outfield test drawing of cleaning machine prototype
4 结语
通过对城市楼宇外墙面清洁的调查,设计了一种高空玻璃外墙清洗机。提出系统整体方案,对楼顶升降机构和清洗平台两大结构展开研究,分别实现了清洗机在外壁面两个自由度的控制、清洗功能和越障功能。清洗机的控制核心由STM32 单片机控制主路及各个分路,通过机械加工和实验测试,研制出平台样机,并顺利完成现场施工。清洗效果验证了玻璃外墙清洗机的实用性,为后续清洁机的发展提供了一定的技术参考。
