2PZ-4000A 型果树栽植机栽植株距试验分析
2022-10-31董晓高光明宫玉敏周慧陈金利王维蒋博
董晓,高光明,宫玉敏,周慧,陈金利,王维,蒋博
(255086 山东省 淄博市 淄博市农业机械研究所)
0 引言
现有果树栽植机采用机械式定株距技术,一般以配置的行走地轮周长为定株距基准,以确定的机械式传动链保证栽植株距大小[1-2]。当机具作业时,由于行走地轮不可避免地受到土壤滑移率的影响,造成栽植株距与设计株距相比存在较大偏差,且偏差的大小与行走地轮的花纹形状、轮宽、作业地块土壤类别、土壤含水率、土壤容重等很多因素有关[3],使偏差具有不确定性,影响栽植质量和栽植精度。另外,果树的栽植密度由品种长势、砧木长势、土壤肥力以及树形和架式等多种因素综合考量来决定[4],不同地区,不同果园,对栽植株距要求也不一样。
果树栽植对栽植株距的要求愈加规范,以便实现果园的机械化作业和管理,实现现代农业要求的标准化生产[5]。2PZ-4000A 型果树栽植机的光电定株距装置可以实现定株距栽植,保证垄上栽植株距的一致性,达到果园的标准化生产和后期田间管理要求。光电定株距系统在实现定株距栽植基础上,可以使栽植株距连续可调,满足不同地区、不同果园对栽植株距的不同要求。本文对2PZ-4000A 型果树栽植机田间试验中与栽植株距相关的检测数据进行分析,提出相应的改进措施,促进果树栽植机具的优化提升。
1 光电定株距装置的结构与工作原理
栽植株距控制通过采用光电定株距技术的光电定株距系统实现。如图1 所示,光电定株距系统配置安装在新型果树垄上定株距栽植机具机架上,由电池、光电感应装置、声光信号发生器、光电感应装置支座滑块、滑块导轨、定株距标尺、栽植计数器等组成。

图1 光电定株距装置结构图Fig.1 Structure diagram of photoelectric spacing device
机具机架呈Π 型,靠近机架机头位置设有果树植入点P,果树植入点P 两侧设有声光信号发生器。滑块导轨沿机具作业方向安装在机架内侧,定株距标尺平行设置在滑块导轨的两侧。光电感应装置固定在其支架滑块上,可沿滑块导轨往复滑动。机具开始作业时,栽植手需要在地头植入第一棵果树,其后,每当栽植好的前一棵果树树干穿越激光束,声光信号发生器发出声光信号指令,栽植手即在植入点P 栽植果树。栽植株距为激光束与栽植好的前一棵果树相遇的检测点和果树植入点P 之间的距离。栽植过程中计数器记录所栽植的果苗数量,可进行累计和清零。光电感应装置由12 V 锂电池提供电源。
2 定株距装置栽植株距试验
2.1 试验条件
试制的样机挂载在道依茨法尔DF1704 轮式拖拉机上,于2020年6月5日至7 日,2020 年9 月3 日至4 日,分两次在淄博市桓台县于家村2 个不同的试验地进行了田间试验。第1 次试验,试验地东西长90 m,南北长44 m,面积约0.4 hm2;第2 次试验,试验地南北长122 m,东西长35 m,面积约0.43 hm2。受试验地面积的限制,未达到试验大纲规定的样机试验面积,每完成一次试验作业后,人工移除栽植的试验果树,利用试验机具与旋耕机配合整平栽植垄,再进行下一次试验。参见图2。

图2 田间试验Fig.2 Field experiment
2.2 试验方法与评价指标
果树栽植机选用105 kW 以上轮式拖拉机为动力,采用后三点悬挂的作业方式,将机具悬挂在拖拉机上。机具作业时,人工喂入果苗作为首个检测目标,栽植机在行驶过程中激光传感器检测到果苗,声光信号发生器发出指令,开启果苗植入窗口,果苗在人工扶持下到达植入位置。
田间试验重点对栽植作业后果树株距、栽植倾斜度、栽植深度等栽植参数进行检测,以验证机具的技术性能。第1 次试验总作业面积约2.4 hm2,第2 次试验总作业面积约1.0 hm2。两次试验总作业面积约3.4 hm2,共检测面积约0.91 hm2(检测面积是正式进行果苗栽植参数测定的面积,总作业面积是预备区、机具转弯、装备调试、果苗栽植等各种作业面积总和)。除去每行两端各10 m 的预备区,随机取5 个检测样本进行测定。在数据检测完后,要及时回收已栽植果苗,以供下个周期栽植使用。
(1)株距
目前,果树垄上定株距栽植机具没有相应的国家标准。栽植试验在参照“果树栽植机械化关键技术研究”项目任务书、JB/T 10291-2013《旱地栽植机械》、DB11/T 654-2009《起垄机作业质量》等相关标准的基础上进行。
栽植果苗的株距按式(1)、式(2)计算:

式中:SX——株距标准差,cm;CVX——株距变异系数,%;N——实测株距数;——株距平均值,cm;Xi——实测株距(i=1,2,…,n),cm。
(2)栽植合格率
果树垄上定株距栽植机具栽植对象是1~3 年生果树果苗,而非JB/T 10291-2013《旱地栽植机械》中界定适用的植物秧苗,栽植时重栽、埋苗、露苗、伤苗等状况很少出现,栽植合格率的计算以果树栽植深度和倾斜角同时合格作为判定栽植合格的依据。对于栽植深度,以150~260 mm 为合格。栽植深度合格率的计算公式如式(3)。

式中:H——栽植深度合格率,%;Nh——栽植深度合格的总株数,株;N——实测株数,株。
因栽植作业时,前一株已栽植好的果苗是后一株待栽植果苗植入时机的检测基准,故栽植倾斜度是影响株距的一个重要因素。倾斜度以大于70°为合格,远高于JB/T 10291-2013《旱地栽植机械》中植物秧苗倾斜度大于30°为合格的规定。栽植合格率的计算公式如式(4)。

式中:Q——栽植合格率,%;NHG——合格株数,株;N'——测定段内的设计株数,株。
2.3 试验分析
2.3.1 栽植质量分析
(1)株距
2PZ-4000A 型果树栽植机果苗株距在1 200~2 000 mm 范围内连续可调。在此范围内选取多种株距分别进行了试验,均取得了良好的试验效果。以1 700 mm 株距为例分析如下。
共测得有效数据254 组,数据分布如图3 所示。1 700 mm 株距试验数据平均值为1 710 mm,株距变异系数为5.9%。
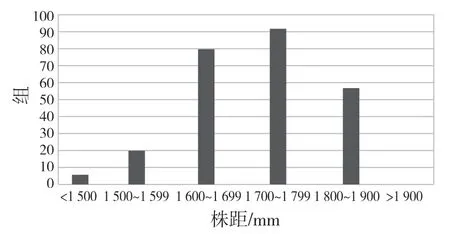
图3 1 700 mm 株距统计图Fig.3 Statistical chart of 1 700 mm plant spacing
(2)栽植合格率
栽植合格率由栽植深度和角度进行判定。JB/T 10291-2013 规定,栽植后秧苗主茎与地面夹角小于30°为不合格,但根据果树栽植与机具起垄特性,为提高栽植质量,现规定栽植深度在150~260 mm,果苗与地面夹角大于70°为合格,栽植深度分布如图4 所示。
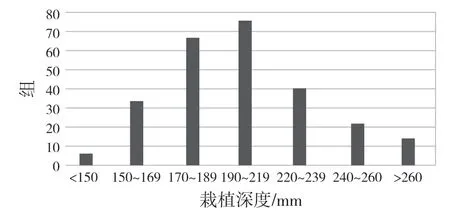
图4 栽植深度统计图Fig.4 Statistical chart of planting depth
试验共测得254 组数据,其中236 组栽植合格,栽植深度合格率为92.9%。在254 组数据中,栽植角度不合格的数据仅有1 组,结合栽植深度和角度判定得出栽植合格率为92.5%。
果树栽植株距在1.2~2.0 m 内连续可调,根据试验数据,在1.7 m 株距下得出果树栽植机田间试验结果如表1 所示。

表1 田间试验结果Tab.1 Field test results
田间试验结果表明,研究的2PZ-4000A 型果树垄上定株距栽植机具作业稳定,主要性能参数达到任务书提出的主要技术指标要求。
2.3.2 适用性分析
试验中,在1 200~2 000 mm 株距范围内选择不同的株距,进行多次试验,并进行测量和记录(如图5 所示),根据栽植质量和栽植精度评估机具的适用性。

图5 试验测量记录图Fig.5 Test measurement record
对作业数据分析比较,机具在1 200~2 000 mm范围内选择不同的株距,均能得到良好的栽植效果,株距均匀。
2.3.3 可靠性分析
第一次试验时,铧犁固定座被地里的较大石块损坏,除场地因素引起的机具故障,机具本身没有产生故障,可靠性指标中可用度达到100%。
2.3.4 经济性分析
(1)机具检测面积为0.91 hm2,生产纯作业时间为65.8 min,纯工作小时生产率为0.83 hm2/h。机具纯作业速度为2.08 km/h,提高了栽植作业效率,节约成本。
(2)采用光电定株距技术的垄上光电定株距系统具备栽植计数功能,栽植计数器可自动统计所栽植的果树株数,可进行累计和清零,利于实现果树栽植的作业效果及相关经济指标评估。
2.3.5 安全性分析
(1)将锂电池和计数器安放到配电箱内,避免暴晒、雨淋、冰冻、腐蚀等影响,确保有一个安全的作业环境。
(2)果苗装载台有2 个,单个尺寸:宽度为800 mm,长度为2 500 mm,面积2 m2,采用格栅网材质,坚固防滑。在装载台外侧设置有防护网,内侧设置有栏杆,并在平台尾部设置有阶梯,以方便操作人员上下。
(3)在机具的配电箱、侧梁、操作平台等部位贴有安全标志和说明标志,起到警示说明作用。
(4)操作座椅配备有安全带,机具作业时作业人员必须系好安全带,规范操作。
3 存在的问题与改进措施
3.1 存在的问题
(1)株距比设定值偏大。通过试验测量的数据发现,测量株距的均值要略大于设计株距。原因是栽植手反应时间过长、放苗动作缓慢或果苗放置位置不准确。
(2)光电感应装置激光发射器和激光接收传感器的输入输出信号线为非伸缩型式普通信号线,在样机作业过程中会因拖拉机振动产生位置游离,对栽植作业产生干扰。如果捆扎信号线或以其他方式固定,则会给沿滑块导轨移动光电感应装置以调整栽植株距带来不便。
3.2 改进措施
(1)对栽植手进行培训,栽植过程中要精力集中,听到或看到栽植信号要迅速放苗。另外,果苗投放位置要准确,如图1 所示,在果苗植入点P处设置V 型投放口,使果苗能够放到恰当位置。针对实际栽植株距比设定值偏大的问题,通过分析多组试验数据,计算偏差值,调节设计株距,使其值略小于理论值。
(2)光电感应装置中激光发射器和激光接收传感器输入输出信号线由起初的普通信号线更换为可伸缩螺旋型式信号线,另外,沿栽植株距指示标尺平行方向,在激光发射器和激光接收传感器可移动范围内,增加设置可伸缩螺旋型式信号线内置圆型导轨,对信号线位置加以约束。改进效果显著,样机田间试验更加顺畅。
(3)提高智能化和机械化水平。对于光电定株距栽植,前一株已栽植好的果苗是后一株待栽植果苗植入时机的检测基准,故人工投苗对栽植手要求较高,栽植手的反应能力、熟练度、投苗力度和投苗角度都是造成株距不均的影响因素。在定植点增加一个自动投苗装置[6],栽植手提前将果苗放入投苗装置,当光电感应装置检测到栽植信号时,投苗装置将果苗投入到犁沟内,随后覆土装置和镇压轮进行覆土和镇压[7]。
4 结论
设计的果树栽植机用光电定株距,可以有效避免栽植作业时土壤滑移率对株距的影响。田间试验表明,2PZ-4000A 型果树垄上定株距栽植机具作业稳定,主要性能参数达到任务书提出的主要技术指标要求。在1 200~2 000 mm 范围内选择不同的株距,均能得到良好的栽植效果,株距均匀。以株距1 700 mm 为例计算相关指标,株距变异系数为5.9%,栽植合格率为92.5%,达到技术指标要求。
