下肢可穿戴外骨骼发展现状的分析与研究
2022-10-21彭兴禹徐尤南
孟 飞 彭兴禹 徐尤南
(载运工具与装备教育部重点实验室 华东交通大学, 江西 南昌 330017)
0 引言
外骨骼这一概念在早期的科幻小说中被提出,在现实社会中最早被提出可以追溯到19 世纪30 年代。随着工业革命的发展,英国人首次提出将蒸汽机穿戴在人身上来增加人体力量[1]144-145。19 世纪末期,俄罗斯人尼古拉斯·亚根(Nicholas Yagn)申请了一项外骨骼专利,这是首次提出制造的外骨骼装备,但是这台装备并未被制造出来。直到20 世纪60 年代,外骨骼的研究取得实质性进展。1963 年,美国陆军外弹道实验室的扎鲁德尼(Zaroodny)发表了一份技术报告,提出已着手解决外骨骼的可携带电源、控制系统、传感系统、人机交互系统等难题[1]146-147。20 世纪60 年代末期,在美国海军研究办公室的资助下,通用电气研究公司和康奈尔大学合作研发了首台全身动力外骨骼模型,这台外骨骼模型被命名为“Hardiman”,其质量达680 kg,有30 个自由度并且覆盖全身[2],虽然它不具备灵活紧凑的特点,但这是可穿戴外骨骼的首个原型机。在2000 年,美国国防部高级研究计划局开始启动外骨骼项目,随后,多个国家掀起了外骨骼研究的热潮,可穿戴外骨骼领域进入飞速发展阶段。
研究外骨骼的初衷是为了增强人体力量,应用于军事领域以增强单兵作战能力。科研人员根据仿生物学,结合计算机辅助、动力驱动等,使人体穿戴以后能够大幅度提高自身力量和速度,实现举重若轻的目的。随着技术的发展,外骨骼被开发应用于康复领域,针对下肢肢体受损导致行走功能不健全的人,利用可穿戴外骨骼设备可以帮助他们行走。
自从外骨骼发展以来,国内外众多高校和研究机构开始相关研究。如美国麻省理工学院、哈佛大学、日本中央大学、神奈川大学、韩国现代集团、汉阳大学、中国的电子科技大学、浙江大学等,在相关领域已经取得巨大成就[3]166-167。
随着动力下肢外骨骼的研究,在动力驱动领域遇到瓶颈,一些研究人员开始研究无动力被动外骨骼,采用平行串联结构、弹性结构等形式,在人体行走过程中搜集能量,在适当的时机释放储存的能量,从而达到帮助行走的目的。
1 有动力驱动外骨骼
在有动力驱动的下肢外骨骼中,可以将外骨骼分为两种类型:刚性外骨骼,指采用刚性结构与人体下肢关节对齐的方式设计,主要为人体行走提供支撑和动力;柔性外骨骼,指采用柔性元件,例如鲍登线、布带、气动肌肉等材料制成的外骨骼,其可以避免刚性外骨骼因为人机交互而产生的干扰,提供较好的穿戴舒适性,主要为人体行走提供辅助,改善行走步态,应用于康复领域。
1.1 刚性动力驱动外骨骼
刚性动力外骨骼一般利用电机、液压、气动等能源为外骨骼提供动力,采用刚性杆件,通过传感器、计算机等来实现人体运动意图感知,从而产生配合人体行走的行为。
2000 年,美国伯克利仿生公司研发了第一代下肢外骨骼机器人BLEEX[1]147-148,研发者宣称这是第一个搭载负载和移动动力的下肢外骨骼(图1)。BLEEX采用线性液压驱动下肢外骨骼,共有7 个自由度(臀部关节3 个自由度,膝关节1 个自由度,踝关节3 个自由度)。其中,髋关节屈曲和伸展、外展和内收,膝关节弯曲和伸展及踝关节屈曲和伸展由液压缸直接驱动[4-6]。在人体的冠状面,根据外骨骼运动学设计,两个腿部骨骼共享髋关节的旋转关节,从而避免与人体髋关节相交,其两条腿部长度可调节,以适应不同腿长的人穿戴。BLEEX 的自身质量为38 kg,最大负载为75 kg。在搭配满额负载的情况下,行走速度可以达到0.9 m/s;在无负载的情况下,最大行走速度为1.3 m/s[7-9]。但是,该外骨骼系统驱动自由度过多,导致外骨骼过于复杂;自身质量与负载比值较小,系统笨重;人机协调性和穿戴舒适性差,续航时间短。
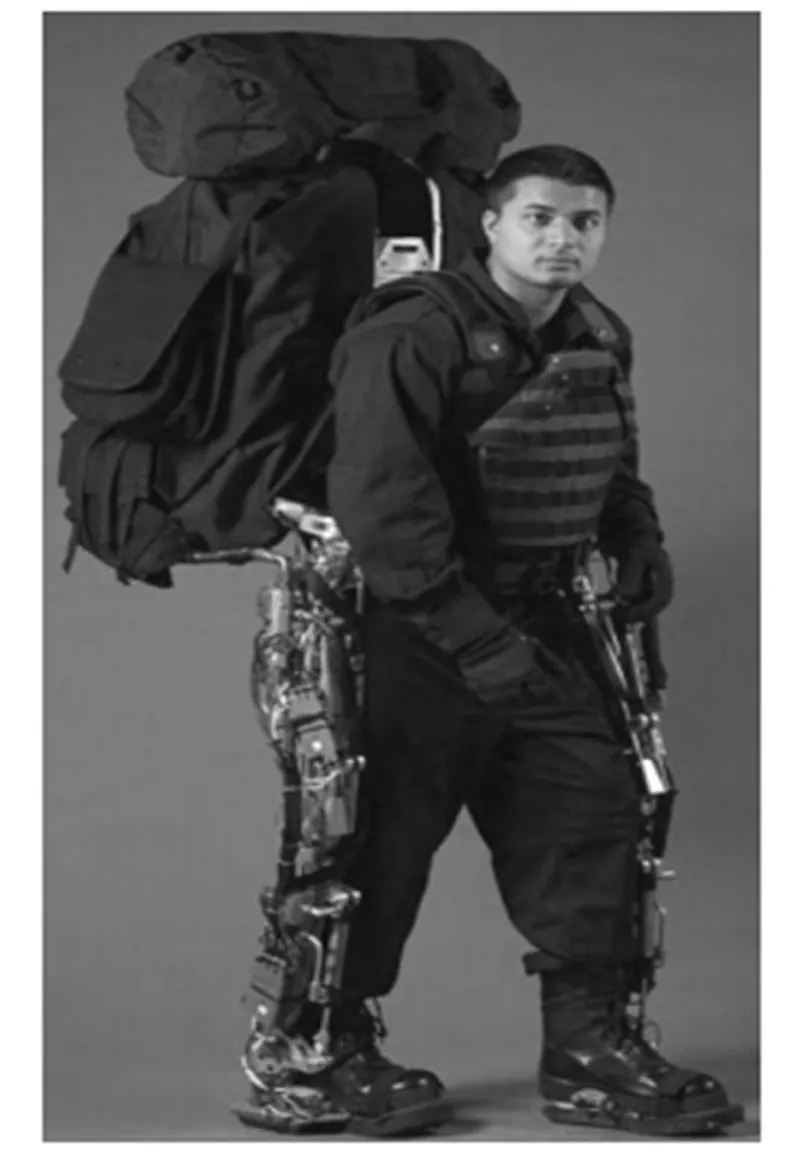
图1 BLEEXFig.1 BLEEX
美国Sarcos 公司在美国国防部高级研究计划局EHAP 项目支持下也展开了下肢外骨骼机器人的研究。与BLEEX 相比,该公司设计的机器人直接在转动关节处安装旋转液压驱动器。根据实验数据,穿戴者能够搭载重达90 kg 的负载,在最大负载时能够以1.6 m/s速度行走;其余信息则很少被公开[10-11]。
2012 年,以色列ReWalk 公司研发的ReWalk 可穿戴下肢机器人(图2)获得了欧盟CE 认证,获得进入欧洲市场的许可,ReWalk 的主要作用是帮助有行走困难的人群重新站立行走[12]。设计师采用了较少的自由度,从而减轻了机器人的协调困难。ReWalk设计了一种双肩包式的背包,把电源以及计算机放在一起,使得机器结构紧凑。通过电机驱动髋关节和膝关节,通过弹簧辅助驱动踝关节。ReWalk 自身质量为20 kg,行走速度为1.6 km/h,在充满电的情况下,其续航能力为160 min[13]。另外,ReWalk 设计有腕带式的控制器,可以切换其行走模式,帮助穿戴者行走、蹲起和上下楼梯;额外配备辅助拐杖以保持行走平衡[14-15]。腕带式的控制器和拐杖简化了穿戴者操作,增加了安全保障,其髋关节和膝关节的主动驱动使得外骨骼系统更加简洁。

图2 ReWalkFig.2 ReWalk
2015 年,韩国汉阳大学的金孝坤(Hyo-gon Kim)团队采用在下肢外骨骼机器人EXO(图3)合适关节处加入弹性元件或者耗散元件的方法,帮助穿戴者在行走和蹲起的过程中减少能量消耗。该机器人自身质量约为35 kg,使用电机驱动,连接半主动液压系统实现驱动外骨骼的意图。通过加入弹性和耗散元件,在20 kg 的负载时,可使穿戴者受到的地面作用力减少200 N[16]。但由于自身质量过重,该外骨骼在无负载时反而会增加人体下肢受力,只适用于背负重物,使用范围小。
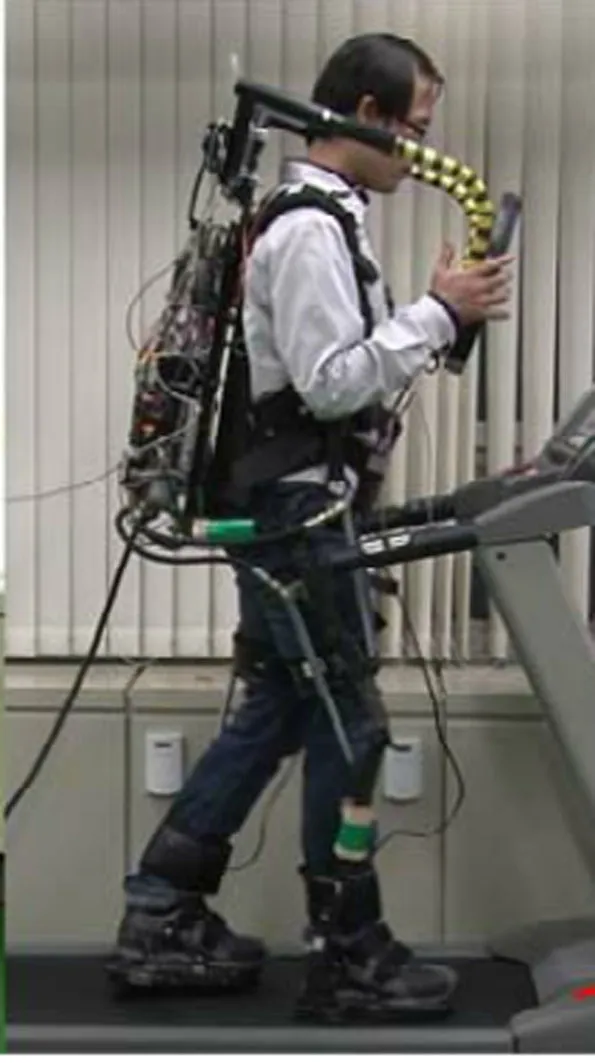
图3 EXO Fig.3 EXO
浙江大学也研发了类似于ReWalk 的下肢可穿戴机器人(图4),可用于帮助患者康复和帮助行走。通过在拐杖上面设计按钮,识别人体意图,达到人机交流的目的。该机器人也可以帮助患者从坐姿到站立起来、上下楼梯行为。
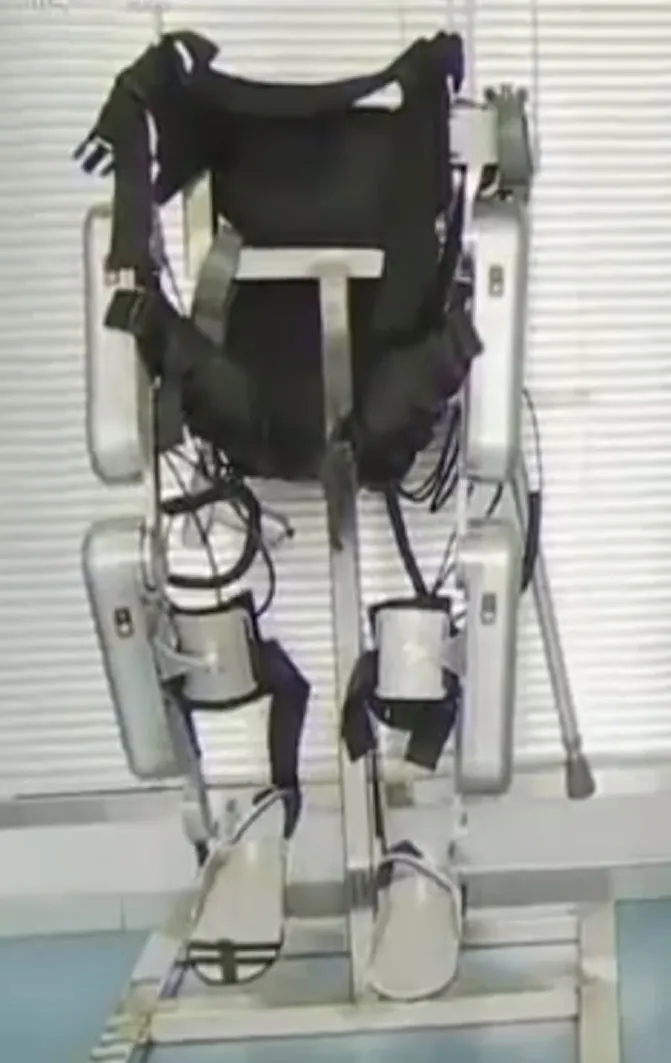
图4 下肢可穿戴机器人(浙江大学)Fig.4 Lower limb wearable robots(Zhejiang university)
2015 年,电子科技大学的团队和Huu Toan Tran教授研发了一种人体动力增强下肢外骨骼HUALEX(图5),其在大腿处设计了可以调节长度的连杆,通过电机直接对髋关节和膝关节进行驱动。该外骨骼能够在行走速度为1.04 m/s 时将72%的负载传递到地面[17-18]。但是,该外骨骼在其髋关节和膝关节处直接加装电机,增加了人体在冠状面的负载。

图5 HUALEXFig.5 HUALEX
北京大艾机器人科技有限公司2018 年推出Ailegs 下肢机器人(图6)。该机器人背部、大腿和小腿的长度尺寸都可以进行调节。因此,机器人可以与不同的身高穿戴者进行匹配,且体积小、质量轻、便于携带[19-20]。

图6 AilegsFig.6 Ailegs
1.2 柔性动力驱动外骨骼
刚性外骨骼机器人因其物理特性易导致人机关节不对齐、附加力矩大,存在穿戴舒适性差、携带不便等不足,许多研发机构开始研究柔性下肢外骨骼机器人。
日本中央大学研制了用于提高行走能力的行走助力机器人[21](图7),该机器人采用气动人工肌肉作为驱动单元,通过收缩和释放相应结点,以髋关节为旋转中心产生力矩,辅助大腿抬起并向前迈步,增加了步长,从而提高了行走能力。在行走速度为0.97 m/s的跑步机上,平均步长增加23 mm;在下肢摆动期间,腿部肌肉活性降低,生物代谢较少,但在支撑期半腱肌活性增加[22]。
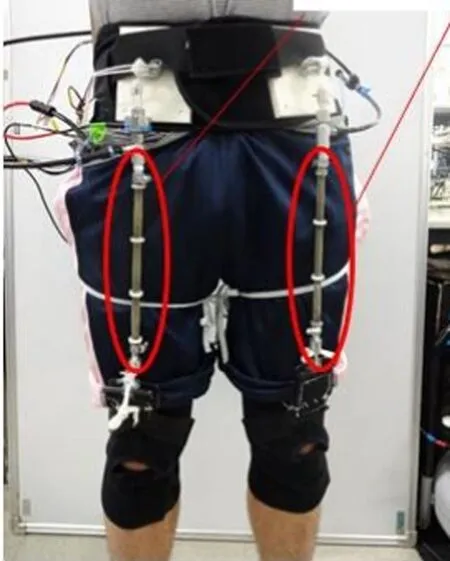
图7 助力机器人(日本中央大学)Fig.7 Power assisted robots(Chuo University)
2013 年,哈佛大学的Wyss 实验室研发了基于鲍登线的多枢纽柔性下肢外骨骼原型样机Exosuit(图8)。该机器人采取新型的轻质弹性纺织带取代传统的刚性布局,使穿戴者的下肢摆脱刚性质料的束厄局面,可以让穿戴者腿部自然弯曲,并且能让穿戴者承受更大的载荷。该外骨骼总质量为10 kg,且续航能力达到4 h。通过对比实验,可以降低穿戴者6%的生物代谢能量[23-25]。2016年,该实验室通过改变控制策略,搜集在行走时产生的负能量并且使之在特定的步态周期释放,可为髋关节提供约为人体自然行走时产生力矩的30%,使生物代谢能最高降低至16%[26-27]。

图8 ExosuitFig.8 Exosuit
2020 年,北京航空航天大学研制出一种可实现跖屈和背屈双向运动辅助的绳驱动踝关节外骨骼(图9)。该外骨骼机器人使用一对单电机分别实现两侧踝关节的跖屈和背屈双向运动辅助。该外骨骼在鞋跟和脚趾前端设置4根电缆,设计了基于齿轮—滑轮组件的绳索力传输系统,可有效地将动力从电机端传递至末端执行器,以此可实现踝关节跖屈和背屈。为了减少给穿戴者施加附加惯性力矩,研发者将电机、供能单元、控制单元安置在人体腰部附近。设计了基于足底压力传感器和惯性测量单元(IMU)的步态检测系统,能有效识别穿戴者的步态周期和步行状态。通过实验测试,受试者在佩戴该外骨骼时比目鱼肌的活动相比降低5.2%[28]。
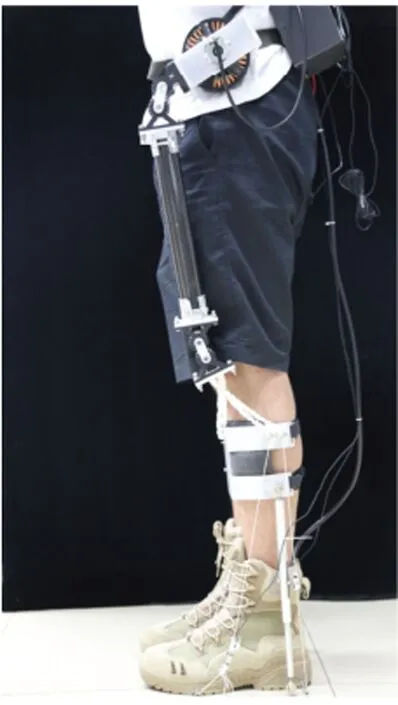
图9 踝关节外骨骼(北京航空航天大学)Fig.9 Ankle exoskeleton(Beihang University)
2019 年,西北机电工程研究所制作出一种穿戴式的柔性踝关节助力服(图10)。该装置参考了哈佛大学的柔性外骨骼设计,其特点为沿着腿部肌肉的走向安装有织物布,可为腿部多处肌肉和肌腱起到省力的作用。通过电机、减速器、布带和轮盘的结构,将电机产生的力传递到踝关节,同时还能增加对其他腿部肌肉的辅助。通过实验,助力服可以提供的最大拉力为100 N,满足对踝关节的助力目的[29]。

图10 柔性踝关节助力服Fig.10 Flexible ankle booster suit
有动力可穿戴下肢外骨骼机器人基本情况对照如表1所示。
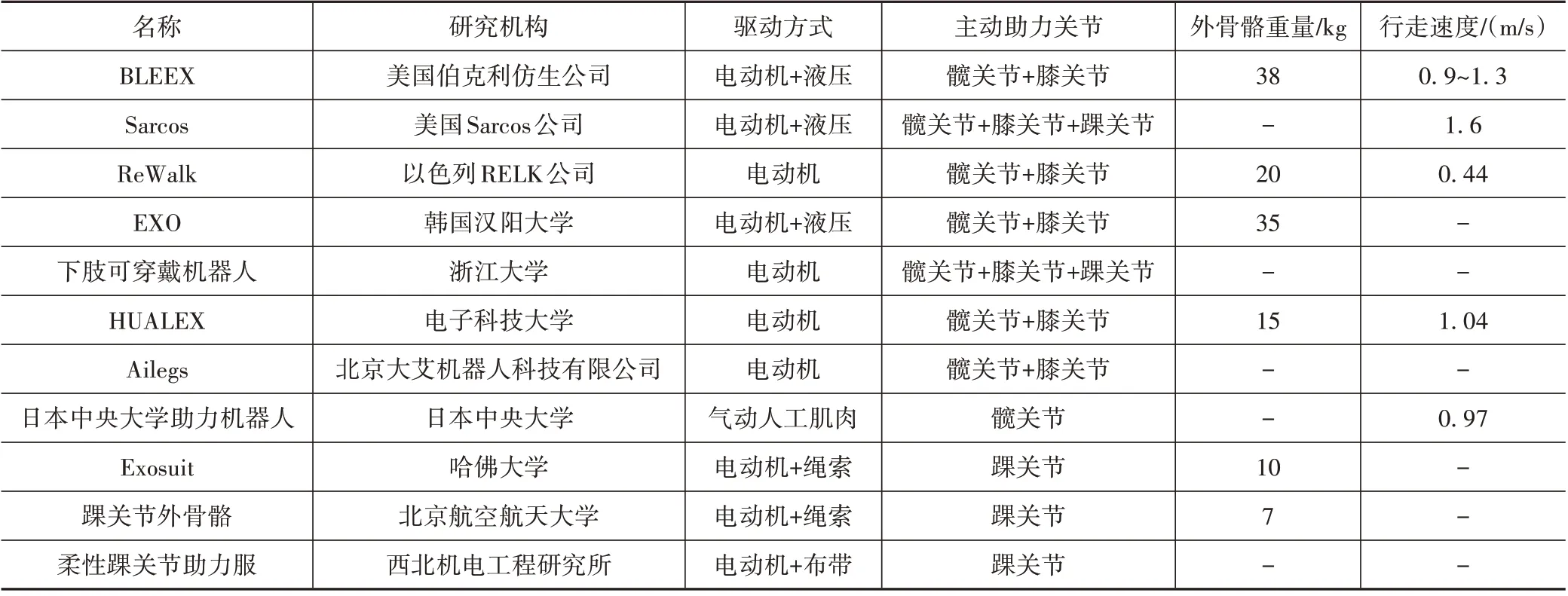
表1 有动力可穿戴下肢外骨骼机器人基本情况对照Tab.1 Comparison of basic conditions of powered wearable lower limb exoskeleton robots
2 无动力外骨骼
在有动力外骨骼研究方面,机器人的动力源多为电源、液压或者气压驱动,这种装备的设计需要搭载外部动力源,导致外骨骼成本高、质量大,也使得穿戴者的行走动作不灵活。因此,研究人员开始将研究方向转为无动力外骨骼。由于无动力外骨骼省略了外部动力的搭载,使得外骨骼的结构更加紧凑,质量大大减轻,节省能源。
北京交通大学研发了一种自适应踝足外骨骼(图11),该外骨骼由鞋子、离合器、伸缩弹簧和柄撑构成,没有外部能源接入。研究人员在鞋子底部设计了两个触发机关,能够识别人体的行走步态,然后通过触发器,引起离合机构的离合,使得踝足外骨骼能够根据步态来通过弹性元件释放和存储由行走产生的能量。同时,在离合器的设计上,研究人员把离合器集中设计在一个小轮盘内部,使外骨骼的结构紧凑,避免产生较大的惯性力矩。实验结果表明,穿戴该设备后让比目鱼肌的活动减少了70%[30-31]。但是该外骨骼设计装置太过复杂,导致机构的效率降低。
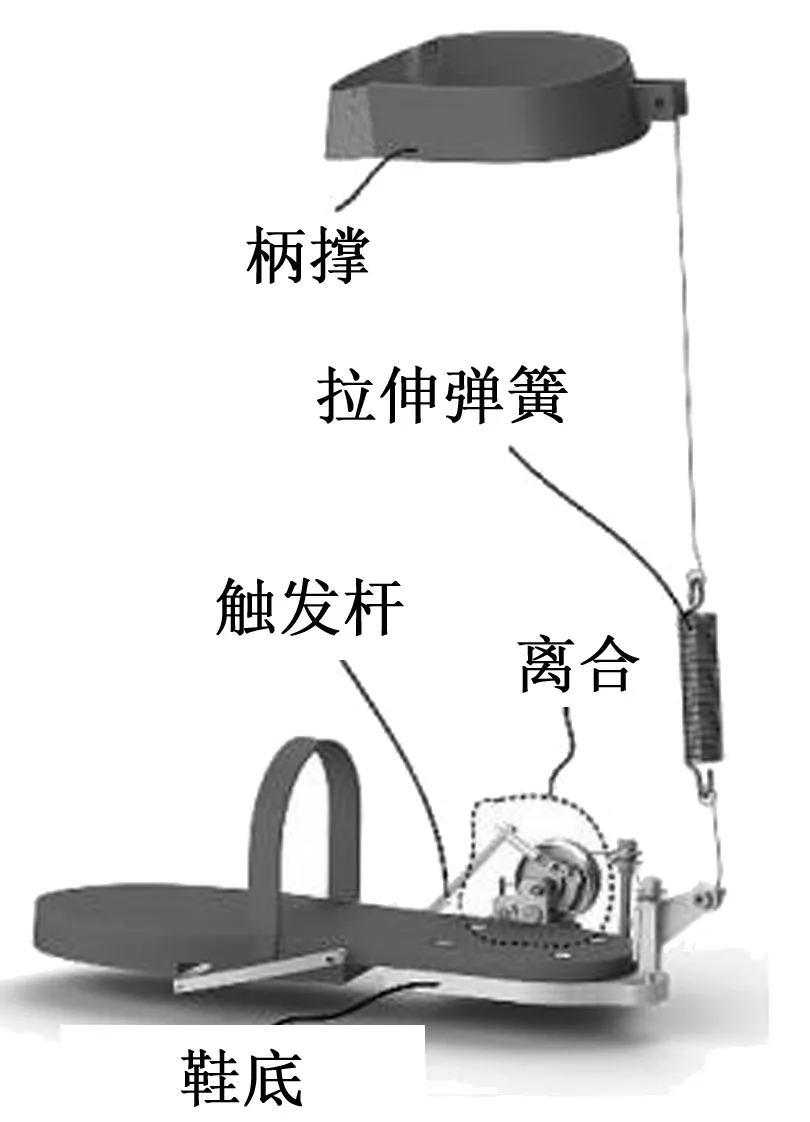
图11 自适应踝足外骨骼Fig.11 Adaptive ankle foot exoskeleton
清华大学团队针对脊髓损伤患者的特点和损伤程度,设计了一种新型无动力储能外骨骼系统ESEXO(Energy-stored exoskeleton)(图12),能够为患者提供精准化助行。该外骨骼主要由髋骨支架、弹性储能单元、大腿杆件和脚底支撑元件构成。其工作原理为:能量存储单元中的两个弹簧在步态中代替部分人体肌肉和肌肉纤维的作用,在髋关节伸展过程中弹簧储能,在屈曲过程中弹簧释放存储能量对大腿进行助力,并将屈髋的部分能量存储在另一个弹簧中,为伸髋运动提供能量[32]。研究结果表明,使用优化的储能元件,髋关节屈曲力矩降低了37.2%,腹肌激活减少,下背部肌肉略微增加。另外,该外骨骼系统还可以通过调节储能元件,为脊髓损伤患者提供特定的步行辅助[33]。

图12 ES-EXOFig.12 ES-EXO
2015年,澳大利亚国防部发布OX新型无动力柔性外骨骼系统(图13),该外骨骼系统具有质量小、轻便快捷的特点,总质量只有3 kg。该外骨骼可利用从肩部到脚部的2 条鲍登钢缆实现负载的载荷传递,将背包负重转移至地面。根据实验结果,该外骨骼可以节省人体50%的能耗。OX 新型无动力柔性外骨骼易于和穿戴者装备集成,不使用时可简单拆卸并放入背包携行,具有结构小巧、持久耐用、成本低等特点[34]。

图13 被动弹性膝踝外骨骼Fig.13 Passive elastic knee and ankle exoskeleton
Spring Loaded Technology 公司于2012 年开展了在膝关节处通过弹性元件进行助力的项目[35]。Levitation无动力膝关节助力外骨骼(图14)为该公司的研发成果。该无动力膝关节的特点是采用液体弹簧替换传统的刚性弹簧,使得外骨骼在膝关节处产生的力矩能与穿戴者完美对齐[3]169-170。该外骨骼工作原理是:液体弹簧通过压缩硅流体分子来储存能量。当膝盖弯曲时,外骨骼储存能量;膝关节伸展时,外骨骼释放能量,对人体进行助力。该款外骨骼质量仅为0.9 kg。实验表明,该膝关节助力装置能够降低穿戴者的膝关节64%的负荷,同时增大穿戴者股四头肌的转矩、强度和力量。该装置可应用于膝关节疾病患者、运动员、沉重体力劳动者[36]。由于该装置的穿戴方法,可能会导致在穿过程中发生外骨骼移位的问题。

图14 Levita-tionFig.14 Levita-tion
3 关键技术
3.1 有动力下肢外骨骼
可穿戴下肢外骨骼是一种集机器人技术、人体生物技术、感知技术以及控制技术等多种先进技术为一体的高精度机器人。通过阅读国内外不同研究团队发表的文献,总结出下列几项在研发有动力下肢外骨骼机器人过程中需要面临的共同关键技术。
3.1.1 驱动系统
在驱动系统方面,介于能源的发展,目前常用的驱动单元为电机、液压、气动驱动,在这3 种驱动[37]1488-1494模式中它们拥有各自的优劣势:
(1)电机驱动标准化程度高,能够实现较高精度的控制,无污染。电机驱动分为盘式电机和电动推杆。盘式电机的结构简单,可以拆卸,但体积较大,增加了外骨骼机器人质量;电动推杆通过连接滚珠丝杠,将电机旋转运动转为直线运动,推动关节转动,但是需要增加额外的减速器,其功率相对较小。
(2)对于气压和液压驱动,二者可以归为同一类型驱动,都具有质量轻、功率高、惯性小等特点,但是它们成本相对较高,且控制精度差、噪声大、密封差。
3.1.2 运动意图与步态识别系统
(1)生理电信号的信息检测技术,利用肌肉电信号(EMG)、脑电信号(EEG)等传感器,贴于人体皮肤表面,通过识别肌肉电信号或者脑电信号来识别人体运动意图。这种生理电信号能够提前识别人体运动意图,使机器人的响应速度更快;但是,利用肌肉电信号的传感器容易受到皮肤表面汗液或者其他信号的干扰[37]1488-1494。
(2)关节角速度的信息感知技术,将速度传感器或角加速度传感器等置于下肢各个关节附近,获取人体下肢的运动速度等信息,通过计算机等辅助计算出下肢步态信息。
(3)利用肌肉压力电信号来识别人体下肢运动意图[38],将传感器置于下肢机器人内部或者皮肤表面,根据人体行走时肌肉收缩产生的压力来识别步态信息。
(4)地面反作用力或者足底压力信号感知技术[39],将力传感器置于足底,根据人体在行走时抬起或下压脚掌,来做出判断识别人体运动意图。
3.1.3 控制策略
(1)预编程控制策略,指下肢外骨骼机器人按照预先编好的运行程序运行,从而带动操作者肢体动作。此种控制策略无需感知人体运动信息,但操作者只能进行有限干预,适用于康复领域[40]。
(2)基于力信息的控制策略,通过各种力传感器获取人体的运动意图信息,通过计算机应用一定的控制算法,从而控制外骨骼机器人能够辅助跟随人体运动。
(3)基于生物电信号的控制策略,利用各种生物传感器获得的人体运动信息,反馈于处理中心,随后,控制机器人根据感知做出跟随穿戴者运动的动作。
(4)智能控制策略,利用模糊控制、神经网络等智能算法,能够智能识别人机交互信息,可以较好地实时处理任何复杂的非线性系统,同时能够自我学习和实验验证不确定性系统的动态特性。
3.2 无动力下肢外骨骼
无动力外骨骼的发展相较于传统下肢外骨骼而言起步较晚,尚处于一个新兴的研究领域。无动力外骨骼的研发过程涉及人体解剖学、仿生学、人体力学、机械结构设计、材料应用等多个学科。目前,无动力外骨骼研发中的关键技术主要有:
(1)材料应用。在无动力外骨骼研发中,要让外骨骼能够满足助力性能,满足轻型设计原则,并具有一定的舒适性。因此,在材料的选择上可以多选用轻型、耐高强度、对人体皮肤无损害的材料,例如,使用碳纤维蜂窝技术、尼龙布料等。
(2)助力性能。由于无动力外骨骼不搭载外部能源,相较于有动力外骨骼,其助力性能有所下降,这也是限制无动力外骨骼发展的技术难题。在研发无动力外骨骼助力机器人时,要对选择的助力元件进行考虑。强度过大易阻碍运动,强度过小则不能提供良好的助力。
(3)控制装置和精度。无动力外骨骼的控制装置主要是控制外骨骼的能量转换,让外骨骼能够吸收人体走动时产生的能量并储存,同时将生物能转换为行走需要的动能。因人体结构复杂,运动意图的随机性、肌肉的收缩程度与肌肉力是非线性关系[41]。同时,无动力外骨骼助力机器人不使用各种传感器感知人体运动意图,难以实现根据人体意愿来控制外骨骼跟随运动。在选择弹簧为驱动部件时,应当选择与肌肉助力成比例的非线性弹簧。
4 展望
通过对有动力和无动力下肢外骨骼机器人的发展状况、结构原理和装备性能等进行回顾总结,可以使我们对下肢外骨骼机器人的作用有更深刻的理解。进入21世纪以来,在几十年快速发展的基础上,下肢外骨骼技术不断成熟,但是仍然有许多技术有待提高和改进。
4.1 有动力外骨骼改善
(1)高续航。经过前面对有动力下肢外骨骼的学习,发现普遍存在续航能力不足的问题,并且电池和电机的体积较大。未来可以发展高强度的续航电池增加续航;发展大转矩密度的电机,减小外骨骼的横向惯性和质量,同时还能让外骨骼轻量化。
(2)人机协调性。现存的有动力刚性外骨骼因为刚性结构的设计导致外骨骼的步态显得笨重。应通过提高传感器精度、改善控制策略等,让外骨骼的步态与人体自然步态更贴近。
4.2 无动力外骨骼发展
无动力外骨骼具有质量轻、操作方便、穿戴简洁等特点,未来的发展可能会比有动力外骨骼更加普及。要加速无动力外骨骼的发展,未来可以向以下方面发展:
(1)提高控制精度。可以将无动力外骨骼看作人体下肢的仿生结构,没有搭载传感器、处理器等,导致控制精度不足。未来应加强对人体奥秘的发掘,发展更加符合人体下肢运动学的外骨骼结构和设计控制精度更高的弹性元件,让外骨骼与人体动作协调。
(2)模块化。无动力外骨骼多为单关节助行,未来可以对无动力外骨骼进行模块化设计,对不同的关节实行多关节协同助行以增强穿戴效果。
