Simulation research on the energy dissipation and shock absorption performance of a swing column device based on fuzzy control
2022-10-19ZhengYongandYuanBo
Zheng Yong and Yuan Bo
1.Research Center of Space Structures,Guizhou University,Guiyang 550004,China
2.College of Civil Engineering,Guizhou University,Guiyang 550004,China
3.Key Laboratory of Structural Engineering of Guizhou Province,Guiyang 550025,China
Abstract: Double-column bridge piers are prone to local damage during earthquakes,leading to the destruction of bridges.To improve the earthquake resistance of double-column bridge piers,a novel swing column device (SCD),consisting of a magnetorheological (MR) damper,a current controller,and a swing column,was designed for the present work.To verify the seismic energy dissipation ability of the SCD,a lumped mass model for a double-column bridge pier with the SCD was established according to the low-order modeling method proposed by Steo.Furthermore,the motion equation of the doublecolumn bridge pier with the SCD was established based on the D′Alembert principle and solved with the use of computational programming.It was found that the displacement response of the double-column bridge pier was effectively controlled by the SCD.However,due to rough current selection and a time delay,there is a significant overshoot of the bridge acceleration using SCD.Hence,to solve the overshoot phenomenon,a current controller was designed based on fuzzy logic theory.It was found that the SCD design based on fuzzy control provided an ideal shock absorption effect,while reducing the displacement and acceleration of the bridge pier by 36.43% - 40.63% and 30.06% - 33.6%,respectively.
Keywords: swing column device;double-column bridge pier;fuzzy control;MR damper;structural control;low-element modeling method
1 Introduction
Bridge structures play an important role in transportation (Panjiet al.,2017;Wanget al.,2020);therefore,it is crucial to effectively control and mitigate their earthquake-induced vibration.A damping device,such as a magnetorheological (MR) damper,a viscous damper (VD),or a tuned mass damper (TMD),is generally installed to reduce the dynamic response of bridges (Huanget al.,2019;Kahya and Araz,2020;Lavasaniet al.,2020;Liet al.,2020;Niuet al.,2020;Pozos-Estradaet al.,2011;Xuet al.,2019;Zhaoet al.,2019).Semi-active MR dampers have significant advantages because of their good controllability,low energy consumption,fast response,and outstanding adaptability (Jiang and Christenson,2012;Xuet al.,2012).Therefore,they could be used as vibration controllers for bridge structures.
Bridge piers act as primary load-bearing elements of bridge structures and are prone to sever vibration due to their small transverse stiffness and natural damping.Hence,it is necessary to improve the seismic performance of bridge piers (Xie and Qu,2018).Arsavaet al.(2016) developed an acceleration feedback-based smart fuzzy controller for coastal bridge piers based on an MR damper and reported that the intelligent fuzzy controller effectively mitigated the impact response of the bridge pier-MR damper system under impact loading.Chenet al.(2018) used a TMD to control the seismic vibration of T-beam bridges with high-piers in the Sichuan-Tibet railway and noticed that the TMD can effectively control the seismic vibration of high piers by determining its best installation position and parameters.To prevent pier damage due to direct collisions between vehicles and ships,Hoanget al.(2016) developed a novel TMD system and applied it to a pier.It was found that the proposed TMD system had a better damage control effect than existing TMD systems.Relevant research on the foundation of piers and pier bearings also has been carried out to achieve superior pier vibration control.Chen and Li (2020) investigated the effectiveness of VDs in improving the seismic performance of a high pier bridge with a rocking foundation,and the results of the nonlinear time history analysis revealed that the VDs could effectively suppress the inclined seismic response of the rocking interface.
Yiet al.(2020) analyzed the potential of viscous fluid dampers (VFDs) in suppressing bearing uplift caused by earthquakes and found that the VFDs slightly reduced the pounding force while effectively controlling the uplift displacement of the deck end.Liet al.(2016)designed a magnetorheological elastomeric bearing(MRB) with adjustable stiffness and damping parameters and reported that the isolation performance of the MRB was similar to that of traditional rubber bearings,which ensure the safety of bridges during earthquakes.Although previous studies have extensively investigated the energy dissipation and damping of bridge piers,less attention has been paid to the transverse energy dissipation and damping of double-column piers during earthquakes (Niuet al.,2020).Hence,the lateral energy dissipation of double-column bridge piers has been investigated in detail in the current work.
This study presented a novel swing column device(SCD) based on an MR damper and designed a current controller to generate control currents for a doublecolumn bridge pier with the SCD.According to the modeling method proposed by Seto (Seto and Mitsuta,1994;Setoet al.,1998),a lumped mass model for the double-column bridge pier with the SCD was established.Furthermore,a current controller based on fuzzy logic control was designed to determine control currents for the SCD.Finally,the motion equation of the double-column bridge pier with the SCD was established according to the D′Alembert principle and solved by computational programming.
2 Double-column bridge pier model
2.1 Double-column bridge pier model with SCD
The model of the double-column bridge pier with the SCD is shown in Fig.1,and it is composed of a cover beam,a chute,two columns,a swing column,a fixed platform,a current controller,bolts,rollers,and an MR damper.The swing column in the SCD could move to the left and right along the chute,and the lower end of the swing column was fixed on the fixed platform and could rotate freely.The MR damper was installed at the vibration node of the two columns (vibration node is the point where the modal value is zero (Seto and Mitsuta,1994)).

Fig.1 Model of the double-column bridge pier with SCD
When an earthquake occurs,the lateral displacement of a pendulum column becomes unsynchronized with that of a double-column bridge pier.The current controller receives the displacement value transmitted by the sensor that is installed on the cover beam and the acceleration value transmitted by the sensor installed on the foundation.The current controller drives the SCD to generate the control force according to the obtained acceleration and displacement values and fuzzy set rules.The control flowchart of the SCD is shown in Fig.2.
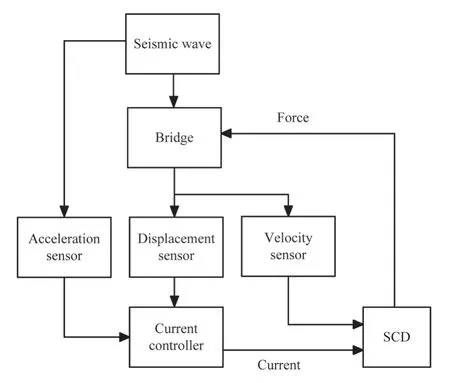
Fig.2 Control flowchart of the SCD
2.2 Simplified calculation model of the doublecolumn bridge pier with the SCD
To analyze the vibration reduction performance of the SCD,a lumped mass model for the double-column bridge pier was established according to the low order modeling method proposed by Seto (Seto and Mitsuta,1994;Setoet al.,1998).The vibration mode shapes of flexible structures were first controlled,and the first to fifth modes of the double-column bridge pier were obtained by using finite element analysis (Fig.3).The mode order was then determined to produce a lumped parameter system.Nodes of the lowest-order uncontrolled vibration mode were determined and used as setting points for the sensors (the fifth mode shape is shown in Fig.3(e)).Subsequently,masses of the lumped parameter system were placed at the selected nodes to create a four-degrees-of-freedom system (Fig.4).Finally,in the double-column bridge pier with the SCD,the swing column was separately concentrated into a particle (m5,in Fig.5).
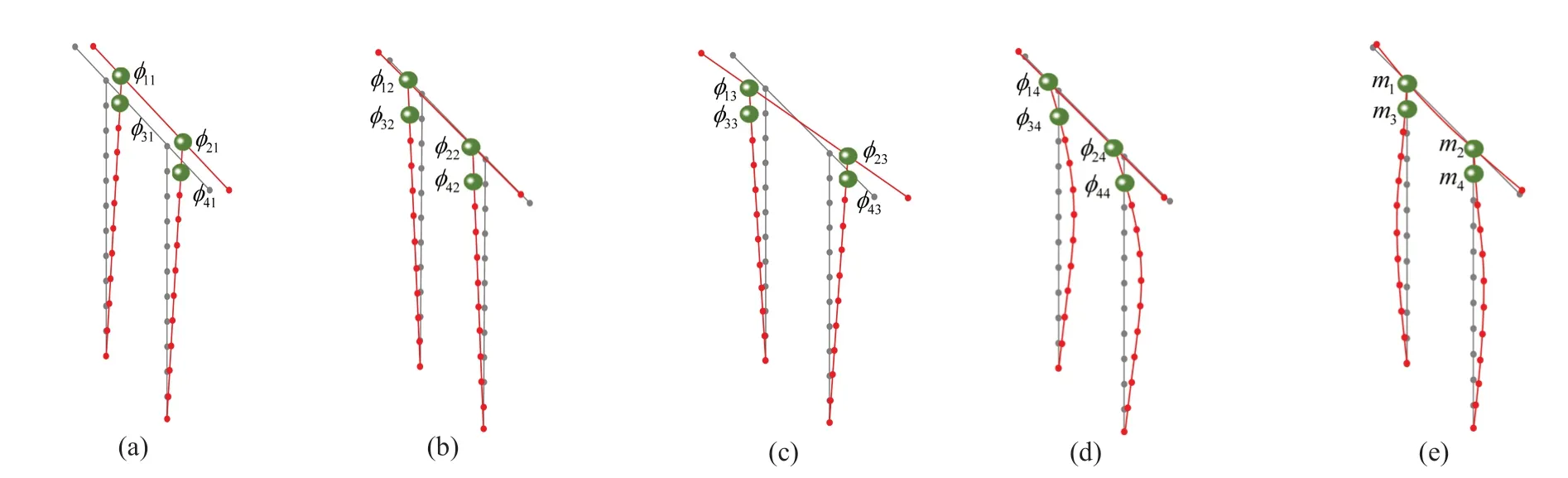
Fig.3 Vibration modal diagram of the double-column bridge pier: (a) first-order mode (3.25 Hz),(b) second-order mode (5.82 Hz),(c) third-order mode (10.43 Hz),(d) fourth-order mode (29.29 Hz),and (e) fifth-order mode (38.1 Hz)
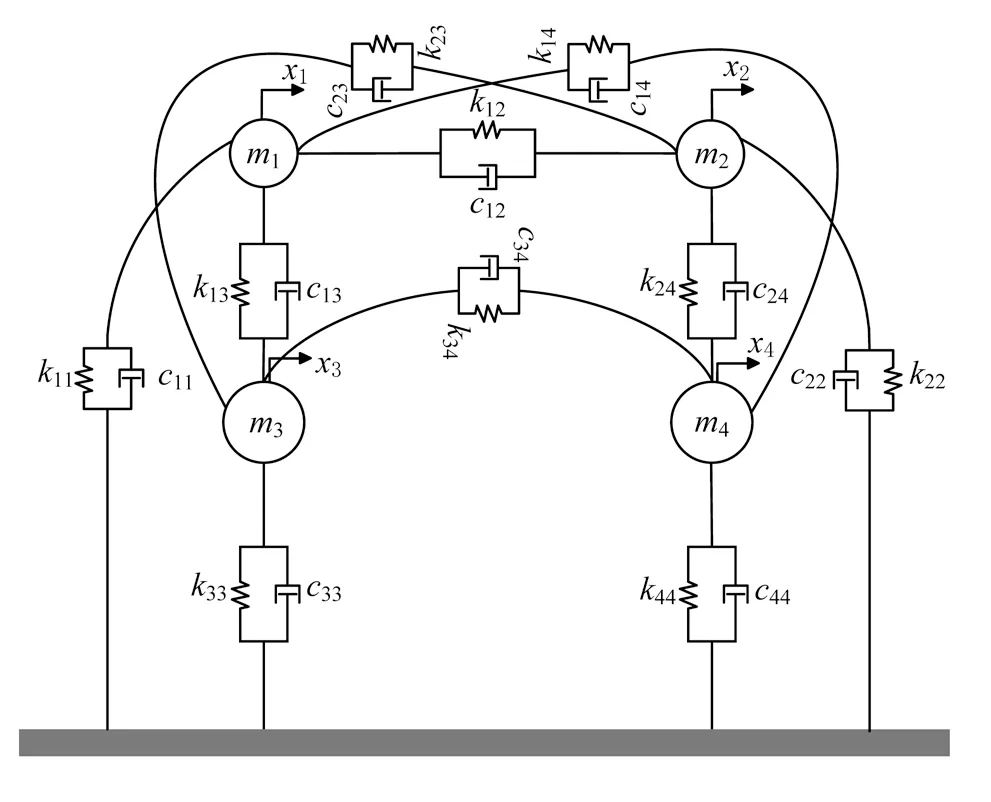
Fig.4 Concentrated mass diagram of the double-column bridge pier

Fig.5 Concentrated mass diagram of the double-column bridge pier with the SCD
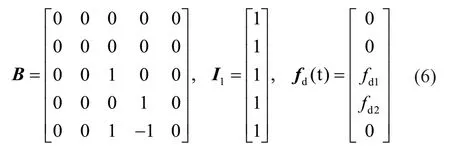
The governing equation of the double-column bridge pier with the SCD can be expressed as:

whereMis the physical mass matrix,Cis the physical damping matrix,Kis the physical stiffness matrix,˙x˙(t) is the acceleration vector,(t) is the velocity vector,x(t) is the displacement vector,is earthquake acceleration,I1is the position vector of seismic waves,Bis the position matrix of the SCD,andfd(t) is the control force vector of the SCD.

wheremiis theith mass,xiis the displacement of massi,is the velocity of massi,is the acceleration of massi,kijis the spring constant between theith mass and thejth mass,kiiis the stiffness of the spring connecting theith mass to the ground,cijis the damping constant between theith mass and thejth mass,ciiis the damping constant of the damper connecting theith mass to the ground,andfdiis the control force produced by the SCD(the value ofiandjranged from 1 to 5).
3 MR damper
The MR dampers are vibration-damping devices that are manufactured by exploiting the rapid and reversible rheological characteristics of MR fluids under a strong magnetic field (Rahmanet al.,2017;Wang and Liao,2011).The performance of MR dampers is affected by numerous factors,such as magnetic field,magnetized particles,temperature,and stabilizer.Since 1995,the MR fluid developed by the Lord Corporation has attracted considerable attention.An MR damper is mainly composed of a coil,a cylinder,a piston,and an MR fluid.The function of an MR damper can be categorized into three modes (Rahmanet al.,2017): valve,direct shear,and squeeze (Moonet al.,2011).To describe the mechanical properties of MR dampers,different models,such as the Bingham model,the Bouc-Wen model,the modified Bouc-Wen model,the equivalent viscous damping model,and the extended Bingham model,have been proposed (Azaret al.,2020;Rahmanet al.,2019;Xu and Guo,2008).In the present analysis,the extended Bingham model is used to represent the mathematical model of the MR damper because it is simple and can better simulate changes in damping force.The forcedisplacement relationship of the MR damper can be expressed as (Phillips,1969):

whereηis the dynamic viscosity coefficient,Lis the length of the piston;Dis the inner diameter of the cylinder;his the clearance of the cylinder;Ap=π (D2-d2)/4 is the effective area of the piston;dis the piston diameter of the shaft;u˙ is the piston velocity relative to the cylinder;sgn is a symbolic function;τyis the shear yield stress;Iis the current;andA1,A2,andA3are the performance coefficients of the MR damper.
4 Design of the current controller based on fuzzy logic
The control efficiency of the extended Bingham model was mainly determined by use of the input current.A fuzzy logic algorithm was used to adjust the input current of the MR damper and control the output of the damper.The design process of the current controller is described below.
First,control parameters were selected.When vibration control meets comfort requirements,the acceleration response of a structure should be selected as a control variable.However,during an earthquake,structural safety is the most concerning issue;hence,the displacement response of structure also should be selected as a control variable.In the present analysis,the input to the controller is seismic acceleration and displacement response of the cover beam.The influence of a time delay can be weakened by inputting seismic information into the controller to generate a control force in advance,and the displacement input controller of the pier can solve the overshoot phenomenon.
Second,the selected parameters were fuzzified.After the selection of control parameters,the fuzzy domains of displacement and acceleration are determined according to the safety limit of a structure and the seismic intensity level of the area where the structure is located.The fuzzy domain of the input current is determined according to the current parameters of an MR damper.In the present analysis,earthquake acceleration and displacement of the cover beam are divided into five grades: positive small(PS),small (S),medium (M),big (B),and positive big(PB),and their membership function uses a triangular membership function.In an actual situation,the input to the current controller does not belong to the selected fuzzy domain.To avoid this situation,the acceleration quantization factorkacc,the displacement quantization factorkdis,and the current scale factorkIwere used to adjust the range of input and output so that they belonged to their respective fuzzy domain.
Third,the extraction of the fuzzy rule was performed.When the response of earthquake acceleration and displacement was PS,the value of the control current was PS.When the response of earthquake acceleration and displacement was PB,the value of the control current was PB.Twenty-five control rules were obtained by analogy,and the rule table was adjusted locally according to the shock-absorption effect of the structure(Table 1).
Finally,defuzzification was carried out.Because it is simple and has a high degree of accuracy,the center of gravity method was selected to solve the fuzzy decision.
5 Simulation results and analysis
The dynamic response of the double-column bridge pier with the SCD during an earthquake was simulated.According to the theory proposed by Seto (Seto and Mitsuta,1994;Setoet al.,1998),the relevant parameters of the double-column bridge pier with the SCD were calculated.First,the modal matrixΦof the doublecolumn bridge pier was obtained by using the finite element method (Eq.(9)).Second,the modified modal matrix(Eq.(10)) was obtained by modifying the modal matrixΦ.The equivalent massM1and equivalent stiffnessK1of the double-column bridge pier were calculated by using Eqs.(11) and (12),respectively.Finally,the mass m5and the stiffnessk55were estimated by using an analogy to the actual column and subsequently confirmed according to the requirements of the control force.The parameters of the double-column bridge pier are listed in Table 2.
It should be noted here that the non-diagonal values of mass matrixM1and stiffness matrixK1are calculated by usingΦ,which is not zero.The non-diagonal values of mass matrixM1and stiffness matrixK1are calculated to be zero by using the modified modal matrix.
whereΩis the diagonal matrix of the natural frequency structure.
The structural damping matrixCwas determined according to the use of Rayleigh damping.In this work,the damping matrixCshown in Eq.(4) was not used.Rayleigh damping was adopted because the damping coefficientcijbetweenmiandmjwas difficult to obtain,as follows:

where the Rayleigh parametersαandβwere calculated using first two lower-order mode frequencies (ω1andω2).
whereω1andω2are the first and second eigenfrequencies of the structure,respectively,according to the “Code for seismic design of urban bridges” (CJJ 166-2011) as utilized in China.The damping ratio of a building structure should be 0.05;hence,ζ1==ζ2==0.05.The external excitations of the structure under three different seismic waves with a peak value of 0.4 g (4 m/s2)are shown in Fig.6.

Fig.6 Seismic waves
The SCD design that was based on fuzzy control is referred to as fuzzy control.The displacement reduction rate (βDis) and the acceleration reduction rate (βAcc) can be defined as:

whereβDis-SandβAcc-Sare the displacement and acceleration reduction rates of the structure under the control of the SCD andxSCDandSCDare the displacement and acceleration under the control of the SCD.Additionally,xNOandNOare the displacement and acceleration of the structure without the control of the SCD;βDis-FandβAcc-Fare the displacement and acceleration reduction rates of the structure under fuzzy control,respectively;andxFuzzyandFuzzyare the displacement and acceleration under fuzzy control.
5.1 Shock absorption analysis of SCD
The MR damper acted as the energy-consuming component in the SCD.The experiment on the MR damper was carried out by Ou and Guan (1999).The MR fluid was developed by Fudan University,China(Xuet al.,2003).The parameters of the MR damper are presented in Table 3.

Table 2 Parameters of the double-column bridge pier with the SCD

Table 3 MR damper parameters
The energy dissipation performance of the SCD was verified from two aspects.First,whenI=0 A,the performance of the SCD was only related to velocity.Hence,when an earthquake occurs,if a power supply fails the SCD could generate a control force according to the received velocity signal.Second,whenI=2 A,the SCD generated the maximum control force according to the input current and the received velocity signal.
When fuzzy control was not considered,according to Eq.(1),the time history curves of the displacement and acceleration ofm1were obtained by computational programming.Figures 7 and 8 show the dynamic response time history curves ofm1whenI=0 A and 2 A under the action of the Taft Lincoln School Earthquake.
Figures 9 and 10 shown the dynamic response time history curves ofm1whenI=0 A and 2 A under the action of the Coalinga Earthquake.
Figures 11 and 12 shown the dynamic response time history curves ofm1whenI=0 A and 2 A under the action of the Hollywood Storage Earthquake.
It is noticeable from Figs.7,9 and 11 that when the external power supply device of the SCD failed(I=0 A),the SCD generated a control force according to the received velocity signal to the control structural vibration.At this time,theβDis-SandβAcc-Sof the doublecolumn bridge pier with the SCD were-14.77% to-10.16% and-18.18% to-11.05%,respectively.WhenI=2 A,theβDis-FandβAcc-Fof the double-column bridge pier with the SCD were-44.69% to-40.94% (Figs.8(a),10(a),12(a)) and-6.12% to 29.09% (Figs.8(b),10(b),12(b)),respectively.
Therefore,it can be inferred that the SCD device could effectively reduce the displacement of the pier.However,an overshoot occurred in the acceleration and local displacement of the pier because the SCD increased the stiffness and damping of the structure.Generally,with an increase in damping,the earthquake resistance of a structure is improved.However,with an increase in stiffness,more seismic energy is transferred to the structure.The seismic response of the bridge pier with the SCD were calculated by use of a time-history analysis.In this method,control forces were calculated according to the seismic responses of the bridge pier in previous epochs.Hence,control forces became distorted due to a time delay,causing an adverse effect on the control action.Furthermore,semi-active control has an inherent time delay.Therefore,to solve this problem,it is necessary to find an effective method that can control the future response of a structure in advance,as well as adjust feedbacks according to the actual responses of the structure to achieve the ideal state.
Therefore,two prominent problems were solved when SCD was used for the energy dissipative shock absorption of the double-column bridge pier.First,when the SCD directly generated a control force based on the current signal and the received structure velocity signal,it had a time delay.Thus,the SCD failed to generate an appropriate control force to protect the structure on time.Second,due to the relatively rough current input to the SCD,the controlled structure exhibited an acceleration overshoot under the influence of a small deformation.
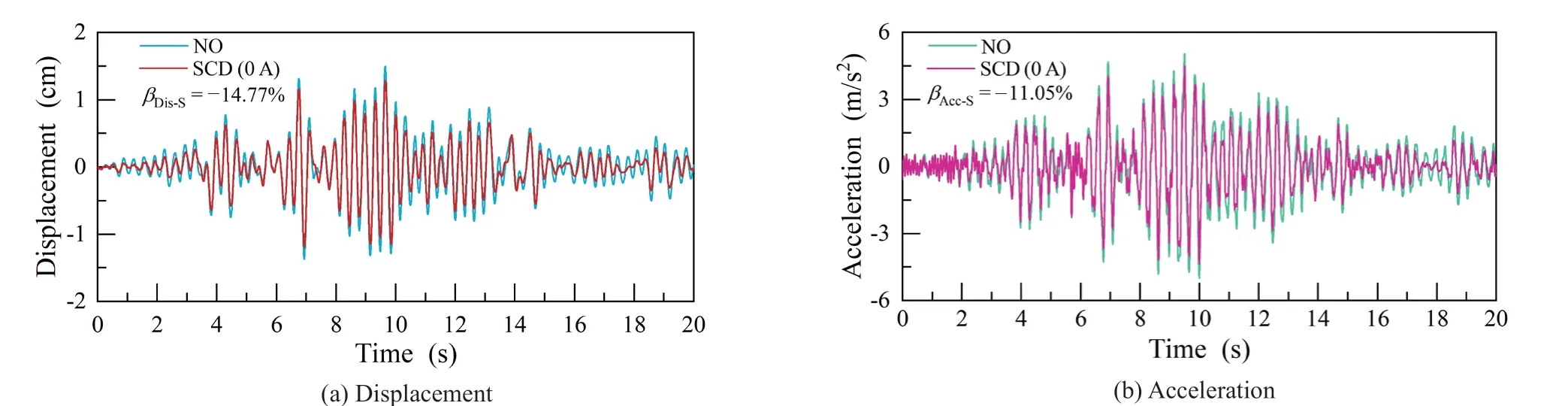
Fig.7 Dynamic response time history curves of m1 under the action of the Taft Lincoln School Earthquake at I=0 A
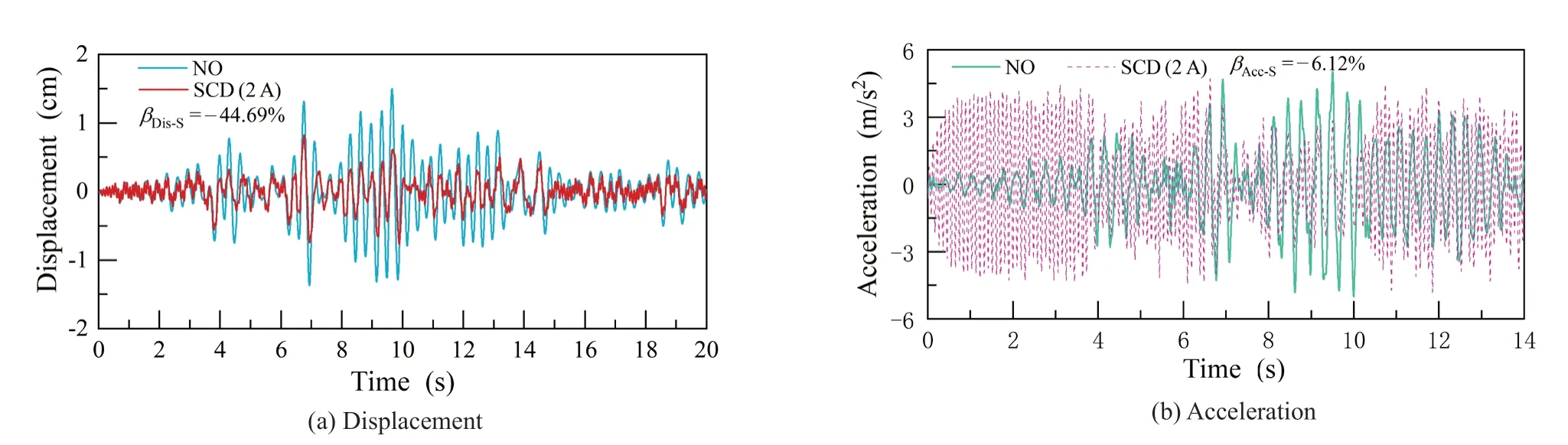
Fig.8 Dynamic response time history curves of m1 under the action of the Taft Lincoln School Earthquake at I=2 A

Fig.9 Dynamic response time history curves of m1 under the action of the Coalinga Earthquake at I=0 A
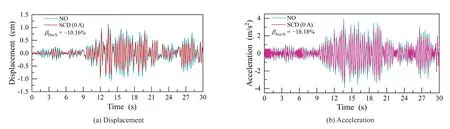
Fig.11 Dynamic response time history curves of m1 under the action of the Hollywood Storage Earthquake at I=0 A
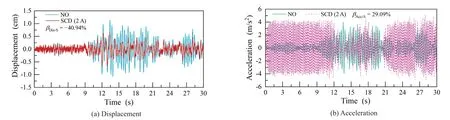
Fig.12 Dynamic response time history curves of m1 under the action of the Hollywood Storage Earthquake at I=2 A
5.2 Vibration reduction analysis of SCD based on fuzzy control
Fuzzy logic control has strong robustness and exhibits an accurate control parameter selection ability.It is considered the best method for solving time delay and current selection problems.In this work,to solve the aforementioned problems,a current controller based on the fuzzy logic control principle was designed.The controller included two inputs and one output.A seismic wave was used as an input to the controller to weaken the time lag problem.The displacement of the structure was used as another input to the current controller to solve the overshoot problem.
To reduce the computing time of the controller,fuzzy domains used positive values.As the peak value of the seismic wave was 4 m/s2,the fuzzy domain of acceleration was [0,4].To simplify the calculation,the upper limit of the fuzzy domain of displacement was set as the maximum value under the action of the three seismic waves.The fuzzy domain of displacement (Unit:m) was [0,0.015],and the maximum displacement ofm1was obtained according to the information listed Table 4.The output current amplitude of the controller was selected according to MR damper parameters.The maximum current input to the MR damper was 2 A;hence,the current fuzzy domain was [0,2].The corresponding membership function curves and surface views are plotted in Fig.13.In an actual scenario,the fuzzy domain of acceleration can be selected according to seismic intensity and the nature of the construction project area.The fuzzy domain of displacement was selected according to the allowable displacement of the structure.The current fuzzy domain was selectedaccording to MR damper parameters.
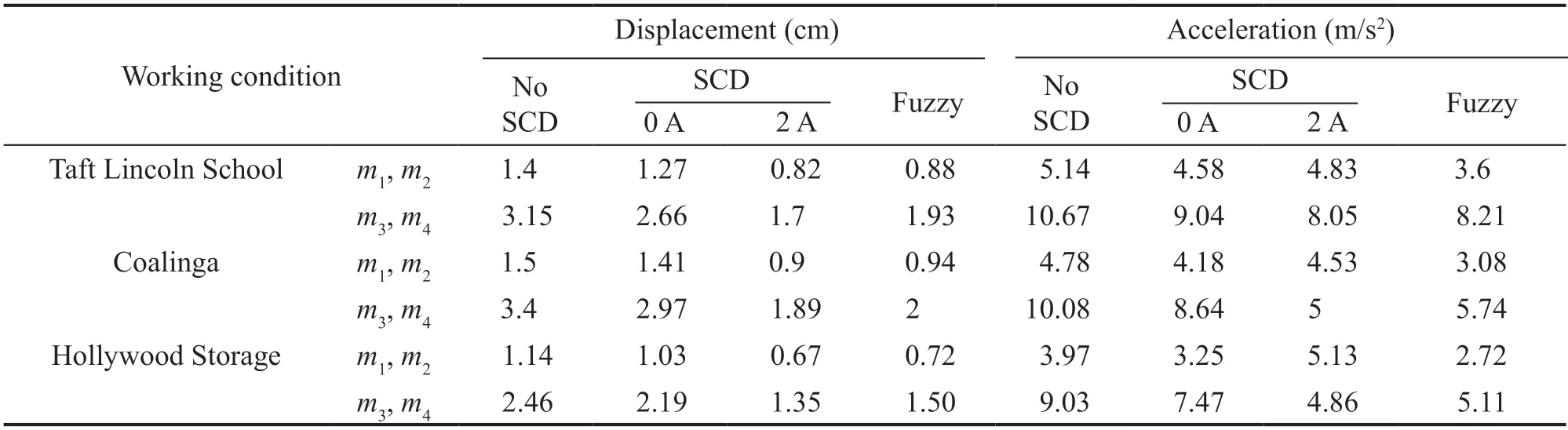
Table 4 Maximum dynamic responses of the double-column bridge pier
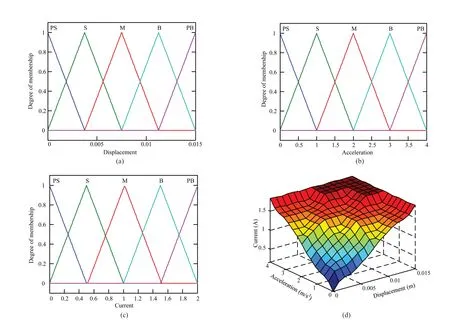
Fig.13 Membership function curves of the current controller: (a) displacement,(b) acceleration,(c) current,and (d) surface view
According to fuzzy control,Eq.(1) was recalculated and the displacement and acceleration time history curves ofm1were re-plotted.Figures 14,15,and 16 show the dynamic response time history ofm1during the Taft Lincoln School Earthquake,the Coalinga Earthquake,and the Hollywood Storage Earthquake under fuzzy control.Table 4 presents the maximum dynamic responses of the double-column bridge pier under the influence of the three seismic waves.
It is evident from Figs.14,15,and 16 that fuzzy control effectively reduced the dynamic responses of the structure.TheβDis-FandβAcc-Fwere-40.63% to-36.43% and-33.6% to-30.06%,respectively,under fuzzy control,and no local overshoot of displacement was observed.A slight overshoot occurred in the local acceleration of the structure under fuzzy control.This slight local overshoot was not sufficient to affect the comfort of the structure;thus,it could be ignored.
It is clear from the information listed in Fig.17 that the current controller outputs the appropriate current into the SCD according to received correlation information,and subsequently,the SCD generates the corresponding control force to obtain the ideal control effect (Figs.14,15,and 16).The control force produced under fuzzy control was smaller than that produced by the SCD whenI=2 A and was greater than that produced by the SCD whenI=0 A (Fig.17).In comparison to SCD control,fuzzy control could generate the appropriate amount of control force in advance and weaken time delay and oscillation phenomena.

Fig.14 Dynamic response time history curves of m1 during the Taft Lincoln School Earthquake under fuzzy control

Fig.15 Dynamic response time history curves of m1 during the Coalinga Earthquake under fuzzy control

Fig.16 Dynamic response time history curves of m1 during the Hollywood Storage Earthquake under fuzzy control
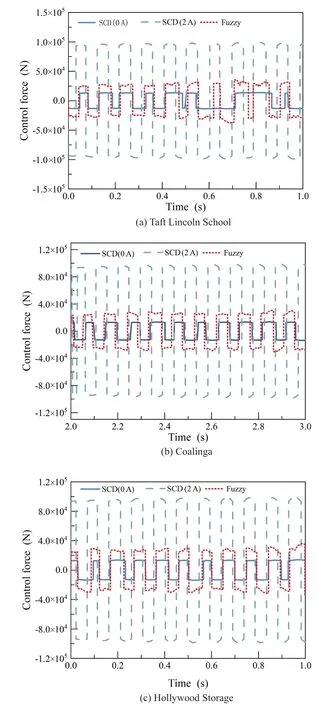
Fig.17 Time history curves of the control force
6 Conclusion
To prevent the destruction of double-column bridge piers during earthquakes,a novel swing column energy dissipation device was designed.If the current device is applied directly to SCDs,the acceleration response of bridge structures increases greatly.Therefore,in order to solve this problem,a current controller was designed based on fuzzy logic control theory.According to the low-order modeling method proposed by Seto,the motion equation of the double-column bridge pier with the SCD was established and solved by computational programming.The main observations of this work are as follows:
(1) The novel SCD significantly reduced the dynamic response of the double-column bridge piers.Therefore,this device can be used as an effective energy dissipation tool to protect bridge structures from damages during earthquakes.
(2) The current controller design based on fuzzy logic theory quickly determined the appropriate current amplitude according to feedback information,without considering the precise mathematical model of the controlled object,thereby reflecting its superiority in practical applications.
(3) Although the fuzzy logic control theory weakened the excessive overshoot phenomenon,a slight overshoot was still noticed under external excitations.To eliminate this overshoot phenomenon,a neural network control algorithm can be used instead of the fuzzy logic control algorithm.
An elaborate experimental investigation on SCD will be carried out in future studies due to its advantages when employed in actual applications.
杂志排行

Earthquake Engineering and Engineering Vibration的其它文章
- Innovative mitigation method for buried pipelines crossing faults
- Study on time-varying seismic vulnerability and analysis of ECC-RC composite piers using high strength reinforcement bars in offshore environment
- Optimization of design parameters for controlled rocking steel braced dual-frames
- Seismic response of selective pallet racks isolated with friction pendulum bearing system
- Reliability and sensitivity analysis of wedge stability in the abutments of an arch dam using artificial neural network
- Steel rings as seismic fuses for enhancing ductility of cross braced frames