基于机会约束规划的含电动汽车主动配电网能量管理方法
2022-10-15韦存昊李泽宁王业庭王世丹
苏 粟,韦存昊,李泽宁,夏 冬,王业庭,王世丹
(1. 北京交通大学 国家能源主动配电网技术研发中心,北京 100044;2. 国网天津市电力公司经济技术研究院,天津 276000;3. 国网新源控股有限公司,北京 100761;4. 国网北京市电力公司海淀供电公司,北京 100195)
0 引言
随着化石能源的消耗以及环境的恶化,世界各国越来越重视节能环保的理念。经过多年的探索可知,发展可再生能源和电动汽车EV(Electric Vehicle)已成为解决能源与环境问题的有效途径之一。
在可再生能源中,太阳能因其清洁环保、覆盖范围大的特点,具有极大的开发价值,已经成为一种较为成熟的可再生能源发电技术。虽然光伏发电渗透率逐年升高,但其出力的随机性和波动性仍是阻碍光伏发电技术进一步发展的重要障碍,例如:若光伏发电直接并网,则会对配电网的电能质量等方面产生影响[1]。所以如何进一步提高光伏的就地消纳水平,提高配电网对光伏的接纳能力成为推进可再生能源发展的关键问题。随着技术的发展,在楼宇的屋顶或外墙上安装光伏电池板并就地发电对楼宇内的负荷进行供能已经成为十分常见的现象。因此,通过调度楼宇内部或周围的负荷对分布式光伏进行就地消纳成为一种切实可行的策略。
而EV作为一种环境友好型的交通工具,具有良好的节能、环保和低碳排放潜力,能将交通领域对化石燃料的大量消耗向电能消耗转变,从而产生巨大的环境效益,这对于实现世界节能减排的发展目标至关重要,符合可持续发展战略,因此在世界各国得到普及应用。
随着可再生能源和EV等柔性负荷的大量接入,传统配电网已经逐渐变为具有一定可控性的主动配电网ADN(Active Distribution Network)。然而EV的充电时间是随机且聚集的,在同一时段内大规模接入EV 将进一步增加电网负荷的峰谷差[2],从而增加电网的负担和运行成本,对电网产生不利的影响[3]。因此,有必要对EV 的充电行为进行一定的引导与控制,充分挖掘其需求响应潜力,进一步实现ADN的灵活运行。
目前已有大量关于引导EV 充电行为以及通过EV 提高电网对可再生能源接纳能力的研究:文献[4]提出了一个两阶段框架,第一阶段以总负载波动最小化为目标对EV进行需求调度,第二阶段以减小系统在EV 无功管理和配电网馈线重构中的损失为目标进行优化,并采用遗传算法进行求解,但在准确性上有所欠缺;文献[5]综合考虑了EV用户需求、道路行驶速度和充电网络负载等因素,提出了一种提高EV用户充换电行为便利性的策略,达到了平滑负荷曲线并提高电网安全性和经济性的目的;文献[6]提出了配电网两阶段灵活性提升优化方法来引导EV 进行有序充电,提升了配电网的灵活性并达到了整体经济性最优;文献[7]提出了一种基于微电网场景的EV 集群平抑光伏功率波动的控制框架,利用EV 充放电功率追踪光伏出力,在一定程度上抑制了短时剧烈波动的光伏功率,同时抑制了EV的过充电和过放电;文献[8]通过拍卖机制引导EV 用户改变自身的充电周期,达到了降低住宅运营成本和减少弃光现象的目的。但上述研究没有充分考虑EV 和ADN 的一体化协同优化,难以通过精确解算法对EV 与配电网系统共同构成的非凸数学模型进行统一优化计算。为此,文献[9]给出了基于二阶锥松弛SOCR(Second-Order Cone Relaxation)的ADN 动态最优潮流基本模型,可对ADN 中各参与元素进行线性化处理以便高效求解;文献[10]根据最优配电网馈线重构和最优发电调度,构建了混合整数二阶锥模型,达到了平滑负荷曲线和降低微电网运营成本的目的。
然而,上述研究没有充分考虑分布式能源等不确定性参数的性质。为了能够精确地刻画不确定性参数,机会约束规划被广泛应用于描述随机变量带来的不确定性,同时提高鲁棒性和可靠性。机会约束规划允许所做决策在一定程度上不满足约束条件,但该决策应使约束条件成立的概率不小于某一置信水平,使得约束条件具有了一定的弹性。文献[11]针对新能源的不确定性,提出了一种基于机会约束规划的孤岛划分方法,利用机会约束处理孤岛划分过程中的电压越限和线路过载问题;文献[12]借助高斯混合模型和线性化潮流方程,提出了一种基于机会约束规划的含风电场电力系统的可用输电能力计算方法;文献[13]利用机会约束规划考虑光伏功率和室外温度的不确定性,实现了含智能办公楼宇的ADN 的灵活运行。然而,目前将机会约束规划应用于EV 领域的研究还不全面与完善。如何利用机会约束规划准确刻画可再生能源、EV 充放电行为的不确定性,并进一步构建融合EV、可再生能源的ADN一体化模型仍是当前阶段的研究热点。
综上所述,本文提出了一种基于机会约束规划的含EV 和分布式光伏的ADN 能量管理方法。首先,基于不同EV 用户的出行特性和需求,建立了经过分段线性化处理的EV 智能充放电决策模型。其次,基于支路潮流模型和SOCR 构建了ADN 系统模型,同时将EV 与ADN 系统共同构成的非凸数学模型转化为凸问题,进一步构建了含EV 的ADN 一体化数学模型,并保证了该模型具有全局最优解。其中,EV 集群作为灵活可控单元,与出力为随机变量的分布式光伏一起被集成至ADN 模型中,可主动参与ADN 的能量管理。然后,对EV 模型和ADN 系统模型中的机会约束条件进行确定性转化。最后,考虑基于不同城市功能区的含EV 与分布式光伏的ADN 场景,进一步对比分析了不同的机会约束越限概率下,EV 对ADN 经济安全运行的影响。目前,在兼顾EV 与ADN 一体化建模的基础上,利用机会约束方法处理可再生能源出力不确定性的研究还不充分。而本文在考虑不同城市功能区内EV 出行特性差异的情况下,将EV离网荷电状态(SOC)和ADN节点电压范围设为软约束以应对可再生能源出力的随机波动,达到优化ADN 经济安全运行的目的,具有一定的研究价值。
1 含EV和分布式光伏的ADN框架与建模
为了解决上述问题,需要建立相关的ADN 一体化模型进行深入研究。本节首先建立ADN 框架,然后分别对ADN的各个部分进行建模与处理转化。
1.1 ADN框架
本文建立的ADN 框架如图1 所示,该框架主要适用于含EV 和分布式光伏的城市ADN 能量管理,考虑了城市规划中因功能属性不同而产生的分区内EV 出行特性以及常规负荷特性的差异,通过对城市中大量的EV 集群柔性负荷进行优化调度和能量管理,实现了城市ADN 运行网损的降低以及城市分布式能源的就地消纳。经过验证,该框架对多种ADN拓扑结构均具有较好的适用性,同时也适用于其他具有分区属性的柔性负荷和分布式能源的能量管理。该ADN 框架分为上、下2 层:上层为电网层,由电网和配电网运营商(DSO)组成,DSO 作为激励型需求响应的实施机构,根据上层电网的供需情况,制定相应的政策,激励下层用户适度地调整自身的用电需求以获取一定的补偿;下层为用户层,由3 个城市功能区(A—C)组成,各城市功能区具有不同的EV 接入特性、EV 用户需求和常规用电负荷特性,且每个城市功能区由EV 集群、分布式光伏、智能楼宇和楼宇能量管理系统(BEMS)构成,EV 集群和分布式光伏以智能楼宇为依托集成在一起,通过响应上层电网的需求实现能量管理。
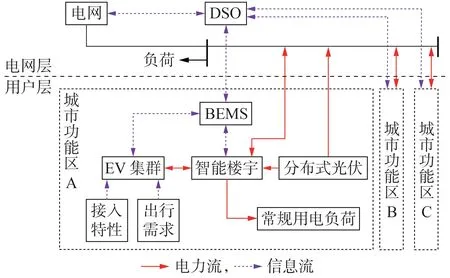
图1 ADN框架Fig.1 Framework of ADN
EV 接入充电桩后开始接受系统调度,BEMS 综合考虑电网层的运行需求以及用户层的EV 接入特性和出行需求,并结合常规用电负荷预测信息、光伏出力预测信息以及ADN 运行信息,制定合理有效的EV 充电策略。智能楼宇可同时接受电网和分布式光伏的电能供应,也可将EV放电电量和分布式光伏产生的电量输送至上层电网层,实现能量的双向流动。同时,BEMS 既能得到电网的运行信息,也可将智能楼宇的负荷信息、EV 集群信息、用户出行需求信息和分布式光伏出力信息等传递给上层电网层,实现信息的双向流动。能量和信息都实现了双向流动,这才能最大限度地发挥ADN 的灵活性和调度能力,对EV、分布式能源和ADN 进行协同控制,实现ADN的灵活运行。
1.2 ADN建模
本节分别构建了EV智能充放电决策模型、考虑出力随机性的分布式光伏模型和ADN 数学模型,并将EV 集群集成到含光伏的ADN 模型中。采用SOCR 法对数学模型进行转化,得到含EV 和分布式光伏的ADN一体化模型。
1.2.1 EV智能充放电决策模型
根据EV 大部分时间处于停驶状态且长时间并网的特性,可对其充放电行为进行智能调控,达到优化ADN运行的目的。

EV智能充放电决策模型可表示为:合整数线性规划数学模型,可采用精确解算法进行快速求解。经转化后式(1)可改写为:
式中:vm、vn分别为节点m、n电压幅值的平方;Pmn、Qmn分别为从节点m流入支路mn的有功功率、无功功率;lmn为支路mn电流幅值的平方;rmn、xmn分别为支路mn的电阻、电抗;Pin,n、Qin,n分别为节点n的注入有功功率、无功功率;k:n→k表示节点k为节点n的子节点;PPV,n、Pbaseload,n、PEV,n分别为节点n处分布式光伏的实际出力、常规用电负荷、EV集群的净充电功率。
式(13)是难以求解的非凸非线性约束,难以保证其全局最优解,所以需要用特定的方法对其进行转化。本文采用SOCR法将其转化为:

SOCR 法的示意图见附录A 图A2,松弛前非凸约束的可行域为Coriginal(即式(13)),松弛后的凸化可行域为CSOCR(即式(17))。若松弛前的全局最优解位于Coriginal内,且松弛过程准确,则该全局最优解也是CSOCR内的全局最优解,即式(13)与式(17)等价。具体的证明过程可参考文献[15]。
综上所述,建立EV 智能充放电决策模型、出力为随机变量的分布式光伏模型和ADN 数学模型,并通过分段线性化与SOCR 对模型中的非凸非线性约束进行转化,进一步构建含EV 与分布式光伏的ADN一体化模型。
2 含EV和分布式光伏的ADN调度方法
2.1 目标函数
本文的目标函数包括降低ADN 的总网损及提高城市功能区负荷对分布式光伏出力的追踪能力以促进分布式光伏的就地消纳,具体可表示为:

式中:T为调度周期的时段总数;Q为城市功能区的数量;Ploss,t为t时段ADN的总网损;Pload,q,t、PPV,q,t分别为t时段城市功能区q的总负荷(包括常规用电负荷和EV 集群充放电负荷)、分布式光伏实际出力;α、β为权重系数。目标函数的第一项为ADN 的总网损函数,第二项为分布式光伏出力追踪函数,表示功能区内节点负荷与分布式光伏出力之间的差值。
2.2 约束条件
约束条件包括EV 约束条件和ADN 运行约束条件。
2.2.1 EV约束条件
EV 约束条件主要包括EV 离网时的SOC需求约束以及SOC、充电功率和放电功率的上下限约束,具体可表示为:


图2 SOC可行域示意图Fig.2 Schematic diagram SOC feasible region
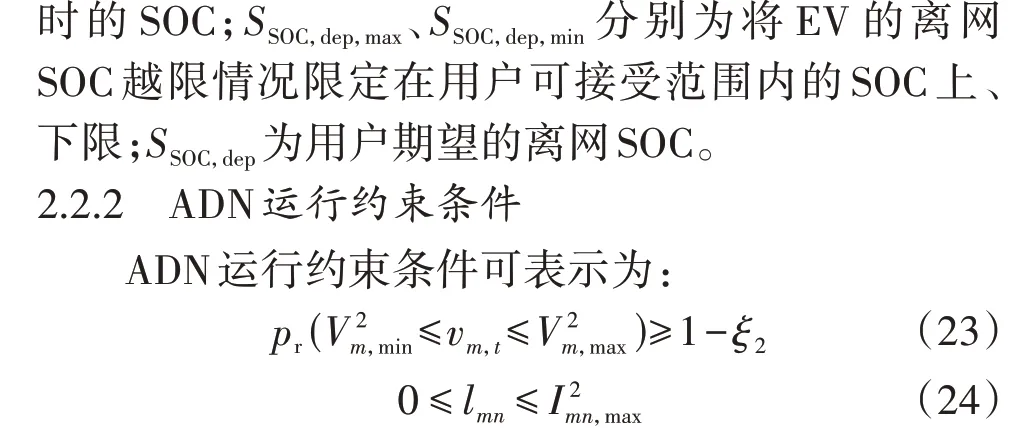
式中:vm,t为t时段节点m电压幅值的平方;Vm,min、Vm,max分别为节点m所允许的电压最小值、最大值;ξ2为节点电压越限概率,表征了机会约束式(23)的置信水平;Imn,max为支路mn所允许的电流最大值。
2.3 ADN一体化模型
综上所述,含EV 和分布式光伏的ADN 一体化模型可表示为:

2.4 将机会约束转换为确定性约束
2.3 节建立的ADN 一体化模型包含了EV 离网时SOC达到用户期望SOC满足一定置信水平成立以及节点电压处于所允许范围内满足一定置信水平成立这2 个机会约束条件。为了将上述机会约束条件整合到优化模型中,实现对一体化模型的有效求解,可以通过下述方法将机会约束条件转换为确定性约束条件[17]。
可在调度周期内将机会约束条件式(19)和式(23)分别转换为式(26)和式(27)所示确定性约束条件。


2.5 求解流程
含EV 和分布式光伏的ADN 一体化模型的求解流程图如图3所示,具体的求解步骤见附录B。

图3 ADN一体化模型的求解流程图Fig.3 Flowchart of solving ADN integrated model
3 算例仿真与分析
3.1 基础数据
本文基于如附录C 图C1所示的IEEE 33节点标准配电网测试系统,根据2017 年美国交通部全国家庭出行调查中各功能区EV的出行特性,将区域抽象分区为工业区、商业区、办公区3 个城市功能区进行仿真分析。工业区的EV 入网时刻和离网时刻近似服从正态分布[18],如附录C 图C2(a)所示;而商业区和办公区的EV 出行时刻概率分布分别如附录C 图C2(b)和图C2(c)所示[19]。3 个城市功能区内EV 入网时的SOC 分布如附录C 图C3 所示。分布式光伏出力预测曲线和3 个城市功能区的常规用电负荷曲线如附录C 图C4 所示[20]。目标函数中的权重系数α=2/3,β=1/9。优化调度周期为00:00—24:00,且以1 h 为时段间隔将其分为24 个时段。设EV 离网SOC 发生越限情况时所允许的最大越限幅度SSOC,bias=4%。工业区、办公区、商业区中愿意参与能量管理的EV 数量分别为50、60、70 辆,采用蒙特卡罗方法对相应的概率分布逐一进行抽样,得到每辆EV 的到达时刻、离网时刻以及入网时的SOC 数据。所有EV 作为一个集群进行统一调度,充、放电功率的最大值均为9.5 kW,充、放电效率均为95%,EV电池的额定容量为60 kW·h。
3.2 结果分析与讨论
3.2.1 不同越限概率下的优化调度结果对比
设机会约束的越限概率ξ1取值分别为0、0.2、0.4,ξ2取值分别为0、0.02、0.04,并以100 次蒙特卡罗仿真实验结果的平均值作为每个场景的仿真结果。仿真实验考虑了光伏出力的预测误差。通过对比分析所采用光伏出力的预测值与实际值,将光伏出力误差的标幺值误差参数ePV,t设为该时段光伏出力预测值的40%,标幺值系数εPV,t通过[-1,1]范围内的正态分布N(0,0.32)随机产生。引入式(28)所示的平均绝对误差eMAE来衡量负荷对光伏出力的追踪效果。

式中:PGYload,t、PSYload,t、PBGload,t分别为t时段工业区、商业区、办公区的总负荷;PGYPV,t、PSYPV,t、PBGPV,t分别为t时段工业区、商业区、办公区的光伏实际出力。
仅考虑EV离网时SOC发生越限的概率ξ1(ξ2=0)以及仅考虑节点电压越限概率ξ2(ξ1=0)对调度策略的影响结果如表1 所示。由表可知:当ξ2=0 时,随着ξ1的增大,ADN 总网损和eMAE逐渐减小,系统的经济性和分布式光伏的就地消纳能力逐渐提高,目标函数值降低表明整体优化效果得到提升;当ξ1=0时,随着ξ2的增大,ADN 总网损增大,eMAE减小,表明系统经济性降低但分布式光伏的就地消纳能力得到提高。虽然ξ2的增大导致ADN 总网损小幅度增大,但eMAE的减小幅度更大,使得目标函数值也随着ξ2的增大而降低,表明了所建一体化模型的整体优化效果得到提升。

表1 不同的ξ1和ξ2取值对调度策略的影响Table 1 Influence of different values of ξ1 and ξ2 on scheduling strategy
2个机会约束的越限概率不同情况下ADN 总网损、eMAE和目标函数值的变化趋势如图4所示。由图4(a)可知,随着ξ1逐渐增大和ξ2逐渐减小,ADN 总网损逐渐减小,并在ξ1=0.4、ξ2=0时达到最小值,说明此时系统的经济性最优。EV 离网时SOC 约束的弹性越大,表明其可调节裕度越大,越能响应ADN进行经济性优化调度;而ADN 节点电压越限概率增大会导致电压质量的降低,给系统经济性带来一定程度的不利影响。由图4(b)可知,随着ξ1和ξ2的逐渐增大,eMAE逐渐减小,并在ξ1=0.4、ξ2=0.04 时达到最小值。eMAE越小,表明节点负荷对分布式光伏出力的追踪效果越好,则分布式光伏的就地消纳能力越强。ξ1的增大在一定程度上弱化了EV 的充电需求,拓宽了其SOC 的可行域,使得EV 能够更灵活地接受协同调度;而ξ2的增大在一定程度上扩大了节点电压的允许范围,进而扩大了节点负荷的可允许变化范围。前者提高了EV集群的灵活性,后者提高了ADN 运行的灵活性,两者都使得节点负荷对分布式光伏出力的追踪效果得到增强。由图4(c)可知,随着ξ1和ξ2逐渐增大,目标函数值呈现逐渐下降的趋势,并在ξ1=0.4、ξ2=0.04 时达到最小值,虽然此时系统的经济性并非最佳,但对分布式光伏出力的追踪效果最佳,使得整体的目标函数值达到最优。越限概率的增大表明模型的可行域在原有基础上得到双向扩大,若该约束条件是限制模型取得更优解的约束条件之一且对目标函数有单调增/减的影响,则可行域的扩大将使得模型能寻找到更优解,具体体现在目标函数可取得一个数值更小的最优解,表明了优化效果得到进一步提高,ADN 的综合运行状态得到进一步改善。

图4 不同越限概率下的优化调度结果Fig.4 Optimal scheduling results under different out-of-limit probabilities
当ξ1=0 时,不同的ξ2取值对ADN 电压的影响结果如表2 所示(表中最低电压幅值、平均电压幅值、电压标准差均为标幺值)。由表可知,节点电压越限概率ξ2的增大仅引起ADN 最低电压幅值小幅度降低,对系统的平均电压幅值和电压标准差并无太大影响。可见,机会约束的引入能在保证系统安全运行的情况下,进一步提高ADN 的综合性能,优化ADN的运行状态。

表2 不同的ξ2取值对ADN电压的影响Table 2 Influence of different values of ξ2 on ADN voltage
3.2.2 不同越限概率下ADN运行状态分析
取某次蒙特卡罗仿真实验进行具体分析。3 个城市功能区在不同越限概率下的节点总负荷曲线如图5所示。由图可知:3个城市功能区在白天时段的总负荷曲线与光伏出力的波动趋势较一致,通过对EV 充放电负荷的有效调度实现了负荷在白天时段对光伏出力的追踪;而在越限概率较大的场景下,EV 的可调节裕度增加,其需求响应能力得到进一步发挥,降低了白天时段的总负荷,使得负荷对分布式光伏出力的追踪效果得到进一步提高。
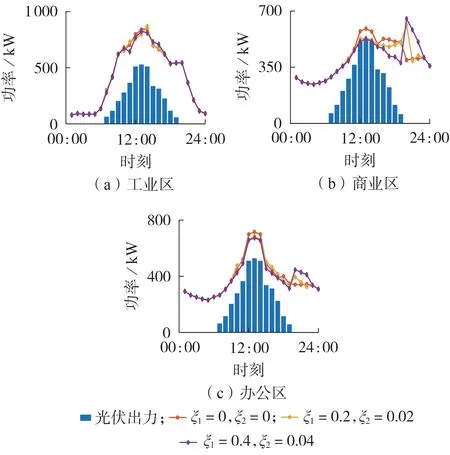
图5 各城市功能区的节点总负荷曲线Fig.5 Node total load curve of each urban functional area
3 个城市功能区内所有EV 的SOC 变化曲线分别见附录C 图C5—C7,图中粗线、细线分别表示EV离网时SOC 发生越限、未发生越限。工业区和办公区的EV离网时的期望SOC设为85%,而入网时SOC低于50%的商业区内EV 的期望SOC 设为50%,入网时SOC 高于50%的商业区EV 的期望SOC 设为其入网时的SOC。由图C5—C7 可知,随着ξ1逐渐增大,更多的EV 出现离网时SOC 越限的情况,且越限程度均被控制在期望SOC 的±4%之内,不会对EV用户的出行舒适度造成过大的影响。允许EV 离网时SOC 有一定概率的越限可以在一定程度上提高EV 接受调度的灵活性,扩大其SOC 可行域,进而更充分地发挥EV 柔性负荷的特性,更好地响应ADN进行优化调度,使得系统的整体优化效果得到进一步改善。
不同的ξ2取值对ADN 节点电压的影响结果如附录C图C8所示,图中红色截面为ADN系统安全电压的下限,本文设为0.9 p.u.。由图C8(a)可知,当ξ2=0 时,ADN 的节点电压没有出现越限的情况,系统节点最低电压与安全电压的下限相等。由图C8(b)可知,由于允许有一定的越限概率,节点电压出现小范围的越限情况。由图C8(c)可知,当越限概率进一步增大时,节点电压超过红色截面的面积进一步增大,表明节点电压出现更多的越限情况,系统的电压质量受到一定程度的影响。
3.2.3 IEEE 69节点配电网测试系统仿真
基于如附录C 图C9所示的IEEE 69节点配电网测试系统,进一步验证EV离网时SOC发生越限的概率ξ1和节点电压越限概率ξ2对系统运行产生的影响。工业区、办公区、商业区的EV 数量分别为80、90、100辆。

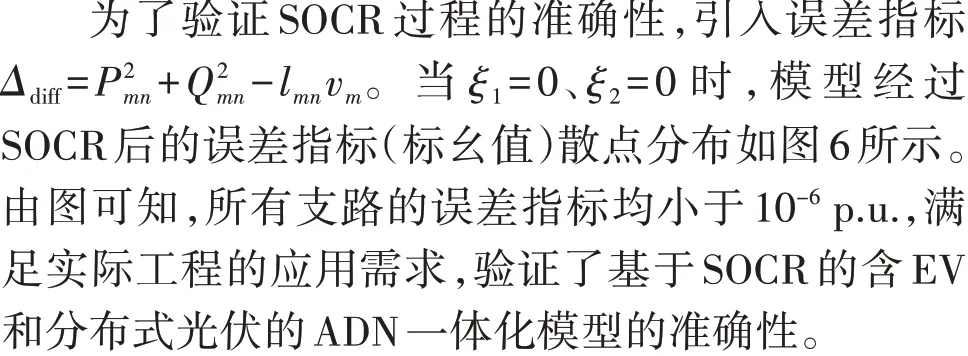
图6 各支路误差指标的散点分布图Fig.6 Scatter distribution diagram of each branch error index
不同的ξ1和ξ2取值对IEEE 69节点配电网系统调度策略的影响结果如表3 所示。由表可知,随着ξ1和ξ2逐渐增大,ADN 总网损呈现单调减小的趋势,eMAE呈现先增大后减小的趋势,目标函数值呈现单调减小的趋势,说明2个越限概率的增大在没有大幅削弱负荷对分布式光伏出力追踪效果的同时,降低了系统的总网损,提升了系统的经济性,进而实现了对整体目标函数的再优化,使得目标函数值随着越限概率的增大而减小,系统达到了更优的运行状态。该结果与上文IEEE 33 节点配电网系统的仿真结果基本一致,存在微小差异的主要原因在于ADN拓扑结构、EV 渗透率等因素的不同。而对于规模更大更复杂的实际ADN 系统而言,随着机会约束条件越限概率的增大,ADN 总网损和负荷对分布式光伏出力的追踪效果或许会呈现不同的变化趋势,但其整体目标函数值普遍会在一定程度内随着越限概率的增大而减小,验证了本文所提策略的有效性及其针对不同ADN结构的适用性。

表3 不同的ξ1和ξ2取值对调度策略的影响Table 3 Influence of different values of ξ1 and ξ2 on scheduling strategy
4 结论
本文提出了一种基于机会约束规划的含EV 和分布式光伏的ADN 能量管理方法。首先,考虑包含3个城市功能区的含EV 与分布式光伏的ADN 场景,构建了基于分段线性化的EV智能充放电决策模型;其次,基于支路潮流模型与SOCR,将EV 集群作为灵活可控单元集成至含分布式光伏的ADN 模型中,进一步构建了含EV 和分布式光伏的ADN 一体化模型,以保证其全局最优解。该模型综合考虑了分布式光伏出力的随机波动性、不同城市功能区内EV用户的出行特点和出行需求以及ADN 运行过程中的确定性约束和机会约束。基于该模型,可在满足用户出行需求的条件下灵活地调节EV 的充放电行为以实现ADN 的最优能量管理。最后,对比分析了不同机会约束条件越限概率下EV 对含分布式光伏的ADN 经济安全运行的影响。基于算例仿真结果可得如下结论。
1)机会约束规划的引入可在保证EV 用户出行需求和系统安全性的同时,充分发挥EV充放电行为的灵活性优势。随着EV 离网时SOC 越限概率的增大,ADN 总网损逐渐减小,系统经济性逐渐提升,同时负荷对分布式光伏出力的追踪效果增强,从而使模型的整体优化效果得到提升。ADN 节点电压越限概率的增大也促进了分布式光伏的就地消纳,提高了电网对光伏的接纳能力,模型的整体优化效果同样得到提升,进一步实现了ADN的灵活运行。
2)EV 离网时SOC越限概率的增大使得EV 离网时的SOC 在一定程度上偏离用户期望的SOC,但通过对其偏离程度的限制,不会对用户的出行舒适度造成过大的影响。ADN 节点电压越限概率的增大会对系统的电压质量产生一定的不利影响,引起系统最低电压幅值和平均电压幅值的降低以及电压标准差增大,但其变化幅度均较小,仍可保证ADN 的安全运行。
3)ADN 一体化模型经过SOCR 后的误差分析结果表明,误差指标可以满足实际工程的应用要求,验证了所建含EV 和分布式光伏的ADN 一体化模型的准确性。
4)对比分析IEEE 33 节点配电网系统和IEEE 69 节点配电网系统的仿真结果,可以得到相似的结论,验证了本文所提能量管理方法对于不同ADN 结构的适用性。
在未来的研究工作中,笔者将进一步设计对参与能量管理的EV 提供合理补偿的机制,以保证EV用户参与能量管理的积极性;研究更合理的城市功能区划分方法以及EV 在混合型功能区下的出行特性和优化调度策略;在机会约束规划中考虑更多的不确定性变量,并提出更合理的置信水平确定方法。
附录见本刊网络版(http://www.epae.cn)。
