基于广义相位信息的摆臂系统喘行故障诊断
2022-10-14曹进华
曹进华
(厦门大学嘉庚学院机电工程学院,福建漳州 363105)
0 前言
摆臂系统作为一种典型的往复机构,广泛用于塔架类大型母体建筑,用于支撑测试电缆、气管、风管等柔性材料。工作过程中,摆臂在液压动力驱动下进行变速往复运动。针对摆臂这类往复机械系统的性能检测与故障诊断的研究,对提高其运行稳定性和可靠性具有重要工程意义。长期以来,由于往复机械结构复杂、激励源多、机器故障产生大量冲击和摩擦以及运行速度不稳定等特点[1],导致测试信号存在非平稳特征。从国内外研究情况来看,故障诊断的研究重点多限于旋转机械,对往复机械的研究相对薄弱。目前应用较多的技术手段主要有热力参数分析、温度分析、油液分析、振动分析等方法,上述方法各有其优缺点[2-3]。针对摆臂系统喘行故障,本文作者提出一种基于广义相位信息的往复机械系统故障诊断方法。
1 广义相位概念的提出
在数学、物理学等领域,相位概念经常用于描述机械振动、电学物理量的空间位置或时间先后关系。就机械振动系统而言,相位用于表示在给定时刻振动体被测点相对于固定参考点的位置,或描述不同部件之间的振动,如式(1)所示。也可以表示2个振动矢量在时间和空间上的相互关系[4]。
x=Asin(ωt+φ)
(1)
式中:x表示振动体的位移;A表示振幅;ω表示角频率;φ表示初始相位,单位为rad或者(°)。
在复杂周期往复机械系统中,由于人为操作导致执行机构速度不稳定,在不同的工作循环中,各机构的状态时域信号不稳定。考虑以某机件的工作行程周期为参考基准,将其他零件工作状态信号绘制在该机件的相位坐标图上,则此时各信号的相位信息反映的是系统各零件状态参数信号相对于基准机件的时序关系。为区别于简谐振动和周期信号的相位概念,这里将它称为广义相位,用φg表示。
根据上述定义,在该相位坐标图中,各零件的状态信号可以表示为
fi(t)=f[ωi(t)t+φgi]+g(γgi)
(2)
式中:ωi(t)为第i个零件的角速度;φgi为该信号的广义相位,表示第i个零件在工作循环中相对于基准部件的相位差,反映系统时序关系;γgi表示第i个零件状态信号物理意义上的相位差,例如同一零件的加速度、速度和位移信号在相位上就分别相差90°。由于2个相位物理意义不同,所以不能直接进行代数运算。
对于一个确定的往复机械系统,各零件广义相位差的确定性与机械系统的动力传递顺序和信号的物理特性有关。在正常工况下,各零件广义相位差应当保持确定的相关性,即为常数Ci,如式(3)所示:
(3)
当有零件工作不正常或存在故障时,该零件及相关零件状态信号的广义相位差就会发生变化。根据这一原理,可以依据广义相位特征信息来判断在时间、空间上的运动时序关系变化,进而诊断出往复机械系统的故障原因。
2 摆臂系统工作原理分析
发射塔摆臂系统属于典型的往复机构,主要由液压分系统和机械分系统两部分组成。其整体结构组成与局部结构分别如图1、2所示。
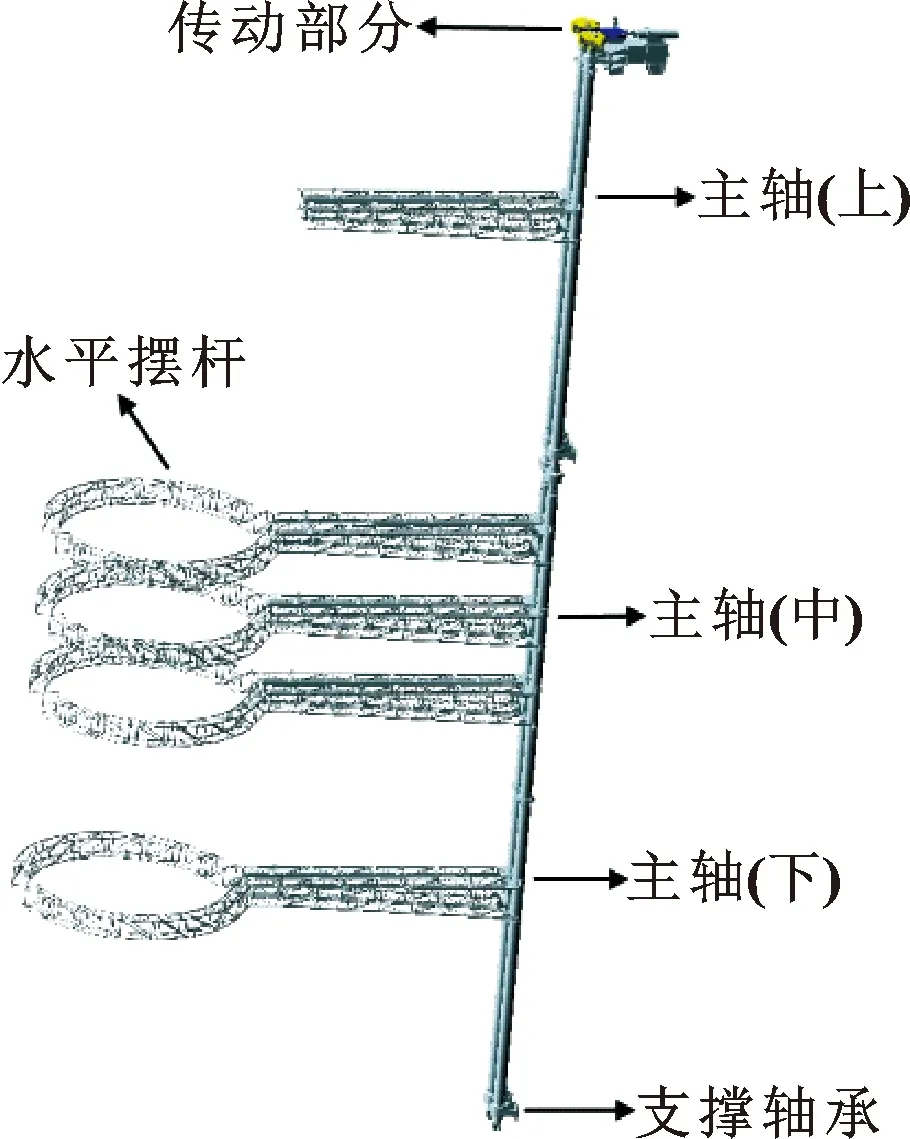
图1 摆臂机械分系统
当摆臂系统运行时,其工作原理如图3所示。交流电机带动液压泵提供压力油,操作人员操纵换向阀,控制液压油的流向,进而使液压缸活塞杆前后伸缩运动;活塞杆另一端与齿条联接,齿条与转轴齿轮啮合,驱动转轴上摆臂悬臂往复摆动,摆动角度范围为90°。为提高液压系统的任务可靠性,液压分系统采用并联双泵双阀组结构设计,以保证为液压系统提供足够的压力,为机械分系统提供可靠的往复动力。

图3 液压系统工作原理
从上述分析可知,摆臂系统的液压部分与机械部分有着明确的单向传递关系。在运行过程中,不考虑测试信号物理相位的影响时,机械系统部件状态信号的广义相位应当落后于液压系统状态信号的广义相位。以摆臂系统油缸活塞杆作为基准部件,其行程周期为参照基准。考虑到各状态信号广义相位信息主要是通过各信号变化趋势对比来读取,与状态信号的量纲无关,因此对各状态信息变量进行归一化处理。另外,为避免图中曲线重叠混乱,将各类状态信号沿y轴适当平移,以便更清晰分析其变化趋势。由此,得到摆臂系统某次开合往复工作周期的液压缸信号曲线如图4所示。
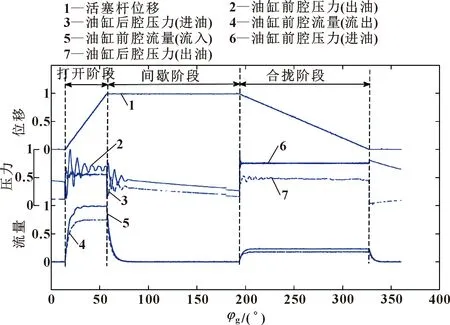
图4 开合过程液压缸状态信号曲线
图4中的曲线表示液压缸状态信号的广义相位信息,即在时间上的先后关系。以活塞杆行程为参照,各状态信号间的广义相位差保持不变,更能准确反映系统部件间的真实工况。当各部件相位差特征发生改变时,说明该摆臂系统出现故障,进而可以诊断出运行状态异常的原因。
3 摆臂系统故障诊断实例
某型发射塔刚建成不久,其摆臂系统在试运行时便出现喘行现象,表现为:无外力作用条件下,摆臂开合过程存在速度不均、间歇性停顿现象,严重程度与运行速度表现出相关性。由于是新建系统,可以初步排除液压系统元件老化泄漏等原因,摆臂喘行主要受系统动态特性影响。因此,拟通过试验测试和信号分析的方法,利用信号的广义相位特征量来判断故障原因。
从该系统结构特点和工作原理分析,导致喘行故障的原因有3个:液压系统动力性能、液压缸与齿条齿轮机械传动特性、水平摆臂机构动态特性。针对上述可能影响因素,综合考虑摆臂系统的空间布局、测点选择、传感器参数等因素[5-7],摆臂系统测试系统如图5所示。
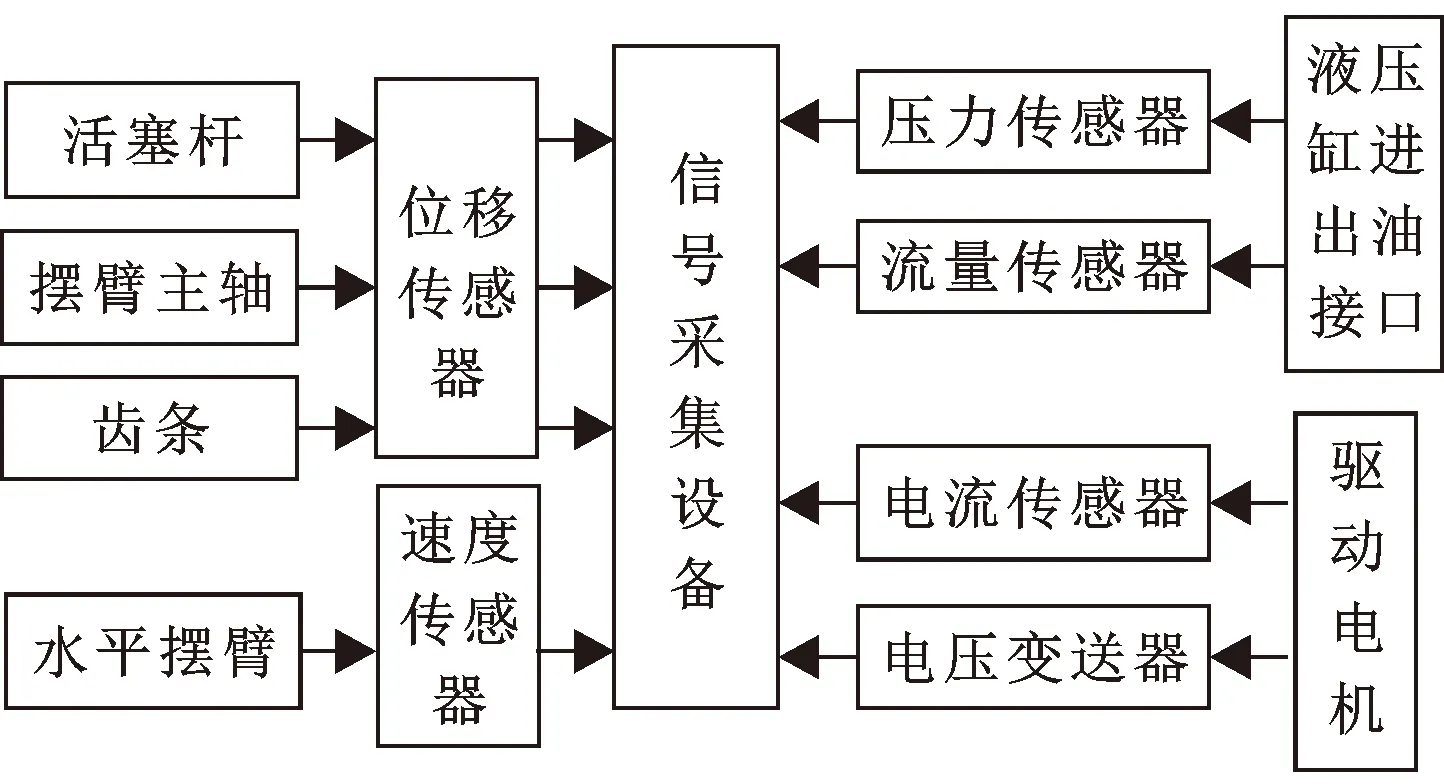
图5 摆臂测试系统组成
利用该测试系统,对摆臂系统开、闭运行过程进行多通道同步测试并记录数据,测得摆臂液压系统电机工作电压和电流、摆臂旋转角位移与角速度、齿条相对液压缸位移、液压缸进出油口压力和流量以及活塞杆相对液压缸位移等信号数据。
对某一组摆臂开合过程的测试信号进行分析,通过前期信号滤波消噪预处理,可得到相应测试信号,并进行以下分析。
(1)液压系统动力特性
从图6可以看出:驱动电机的功率曲线表明驱动电机的功率输出基本平稳,没有明显波动,说明液压动力系统提供驱动力矩稳定,液压驱动系统动力特性不是造成摆臂喘行的原因;此外,尽管液压缸前后缸内压力波动剧烈,但电机功率曲线保持平稳,说明液压系统内部压力满足负荷要求,在溢流阀的调节下,没有影响电机负载变化;从流量曲线来看,液压缸后腔是压力液体流入腔,由于活塞杆的存在,前后腔体截面积存在差异,使得后腔流入流量大于前腔流出流量,也符合实际情况,流量曲线总体平缓,其广义相位特征信息不能提供更多信息;从压力曲线来看,液压缸前腔压力变化剧烈,持续于整个打开过程中,后腔压力变化相对平稳。如图7所示,前腔压力曲线的广义相位领先于后腔压力曲线,说明前腔压力变化先于后腔压力变化,这与压力油从后腔接口进油的实际情况是矛盾的。另外,摆臂到位后,液压缸停止供油,由于惯性影响,摆臂出现往复振荡,摆臂机构反向力作用于活塞杆,此时前后腔压力只受摆臂机械惯性力影响,相位特征保持一致。
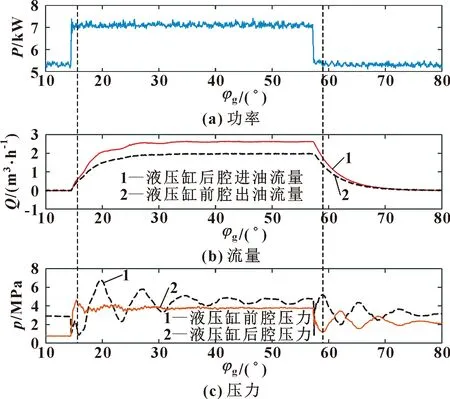
图6 打开过程液压动力系统信号曲线

图7 液压缸前后腔压力曲线局部细节
(2)液压缸与齿条齿轮机械传动特性
作为液压系统动力输出的关键执行部件,液压油缸中活塞杆直接与传动部件齿条连接,其传动特性包含了摆臂工作过程的负载与驱动系统相互作用的信息。活塞杆和齿条位移曲线如图8所示。由图9、图10可知:在摆臂喘行时刻和打开结束时刻,活塞杆与齿条位移曲线存在明显的不同步现象,这说明活塞杆与齿条之间的机械连接不是紧配合,两者间存在间隙。

图8 活塞杆和齿条位移曲线
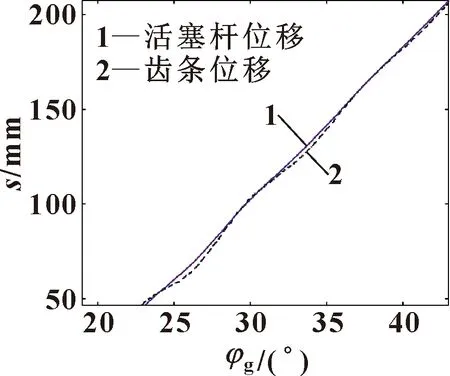
图9 起始段位移曲线局部细节

图10 终了段位移曲线局部细节
(3)水平摆臂机构状态分析
在摆臂系统中,水平摆臂是整个摆臂系统的传动最末端。正常情况下,液压系统的广义相位应领先于水平摆臂的广义相位。为进行对比,选取上摆臂的速度曲线和液压系统执行部件液压缸的压力曲线进行对比分析(见图11)。可以看出:上端摆臂的速度与液压缸前腔压力波动有明显的对应关系,但是在相位顺序上,上端摆臂速度曲线上A1、A2两点相位要领先于液压缸前腔压力曲线上B1、B2两点的相位。由此可见,摆臂系统打开过程中,水平摆臂运行先出现异常,随后才通过机械传动,将反作用力传递到液压缸。液压缸前腔与回路通路相连,回油压力较低,提供阻尼小,所以前腔油压容易受水平摆臂速度波动的影响。

图11 摆臂上端速度与液压缸前腔压力信号对比
通过上述分析,可以得到以下结论:
(1)工作过程中,驱动电机输出功率总体平稳,提供驱动力矩没有明显波动,可以判定摆臂喘行故障与驱动电机及液压泵的运行状态无关;
(2)液压缸活塞杆与齿条联接处存在间隙,两者相对于液压缸体的位移不完全同步,活塞杆推齿条往复运动时,存在时断时续的状态,导致水平摆臂处于短时低阻尼的工作环境;
(3)工作过程中,上端摆臂速度曲线广义相位领先于液压缸前腔压力,液压缸前腔压力广义相位又领先于后腔压力变化,这说明水平摆臂的动态特性是喘行现象的根本原因。由于摆臂机械部分属于悬臂梁结构,它具有的柔性特性在摆臂运行过程中会表现出来。根据结论(2)可知,活塞杆与齿条连接处存在间隙,使得水平摆臂在工作过程中短时处于无阻尼或小阻尼状态,进而出现振颤、速度不均的喘行现象。
因此,为减弱或消除摆臂喘行现象,一是要消除齿条与活塞杆之间间隙,使液压缸在提供驱动力矩的同时,还可以提供部分阻尼,以减弱水平摆臂固有柔性特性的影响[8];二是改造摆臂机械结构,增加若干个阻尼器,提高摆臂机构运动平稳性[9-10]。
4 结论
根据往复机构的工作特点和运行规律,提出了一种基于广义相位信息特征的故障诊断分析方法。将该方法运用于典型往复机构发射塔摆臂系统的故障诊断中,找出了摆臂系统喘行故障原因,提出相应的改进措施。基于信号广义相位特征信息分析方法的研究,为往复机械系统的性能检测与故障诊断提供了一种新的研究思路,具有重要的实际工程意义。
