基于OWL的CMM探测系统智能配置方法研究
2022-10-14黄美发刘廷伟唐哲敏罗民宏
黄美发, 刘廷伟, 唐哲敏, 罗民宏
(1.桂林电子科技大学机电工程学院,广西桂林 541004;2.广西制造系统与先进制造技术重点实验室,广西桂林 541004)
0 前言
信息技术和制造技术的快速发展使得零件制造误差的智能化检验已成为必然的发展趋势[1-2]。现阶段零件误差的测量,需要根据零件的功能要求、图样标注和技术要求等文本说明,通过人工获取所标注产品与制造信息(Product Manufacture Information, PMI)的含义即工程语义,依据测量条件作出综合决策;确定测量设备,选择测量方法;通过测量设备获取实测数据,调用评定算法得到测量结果,最后判定其合格性[3]。但是,为保证工程语义在设计与测量中相统一,正确理解工程语义自动推理出合理的探测系统方案是亟待解决的问题。
探测系统是三坐标测量机(Coordinate Measuring Machine, CMM)的重要组成部分,由测头、测座和探针等组成[4]。由于探测系统方案选择具有较多不确定性,测量质量严重依赖相关人员的水平和经验,导致零件测量成本增加,并最终影响零件验收。因此,利用CMM进行智能检测,实现探测系统的智能配置具有重要意义。
目前,针对公差检测中的工程语义表示与传递、智能决策等问题,主要运用语言模型、范畴论、多属性决策方法、本体技术和多色集合等5种方法进行研究。
ZONG等[5-6]基于EXPRESS语言和可扩展标记语言等语言模型,构建零件公差表示模型,但此类模型是一种标记性语言,无法满足语义表示。LU[7]基于范畴论的方法,提出范畴论测量模型,此模型在语法上能正确推理测量设备。ZHAO等[8-9]基于多属性决策的方法,构建了几何公差规范设计模型,构造推理规则得到公差项目,但未实现异构系统语义传递。目前,以上3种方法均用于公差规范,未实现测量方案的智能推理。QIE等[10-12]基于本体的方法,构建公差语义表示的本体模型,实现公差项目和一致性检测方法的智能推理,但对异构系统中信息传递的研究较少。刘恩福等[13-14]基于多色集合的方法,构建几何公差信息的语义表示模型,实现在CAD异构软件中集成,进而实现测头类型推理,但构建的表示模型未能使计算机理解工程语义。
尺寸与公差信息(GD&T)的有效获取与正确表达是进行零件语义传递的首要工作。许多学者提出了一种由STEP(Standard for the Exchange of Product Model Data)文件向OWL映射的方法,提供了由STEP向OWL映射的详细规则,但是生成的STEP文件缺失GD&T信息[15-16]。
目前,还没有一种既能满足工程语义在异构系统中表示和传递的需求又能智能推理出合理的探测系统配置的方法。针对该问题,本文作者采用模型定义(Model Based Definition, MBD)和本体结合的方法,研究工程语义从CAD系统到.owl文本的形式化表示和探测系统的智能配置方案。
在工程中,本体(OWL)的形式化语言对特征知识进行规范化表示,使语义能够被计算机所理解并在异构系统共享[10-12]。利用Jane规则的推理机有高效的推理能力,同时能保证相关推理的准确性。
借鉴于本体技术的功能,构建探测系统本体模型,通过调用所设计的生成.owl文件的算法,得到包含个体信息的探测系统本体,再构建Jena规则,智能推理出CMM探测系统方案。最后,通过测量零件,验证方法的有效性。
1 零件PMI信息的表示
将零件的产品与制造信息[17](Product Manufacture Information, PMI)以数据结构的形式表示,并显式地给出与公差项目关联所需的几何要素和尺寸,所有采用本体形式化语言对零件的PMI信息进行规范化表示。因此,采用数据集的方法来表示基于MBD技术的零件信息。当前,具有特征构造功能的CAD系统支持MBD模型的建立,采用MBD技术建立完整的包含设计与制造信息的零件模型,如图1所示。
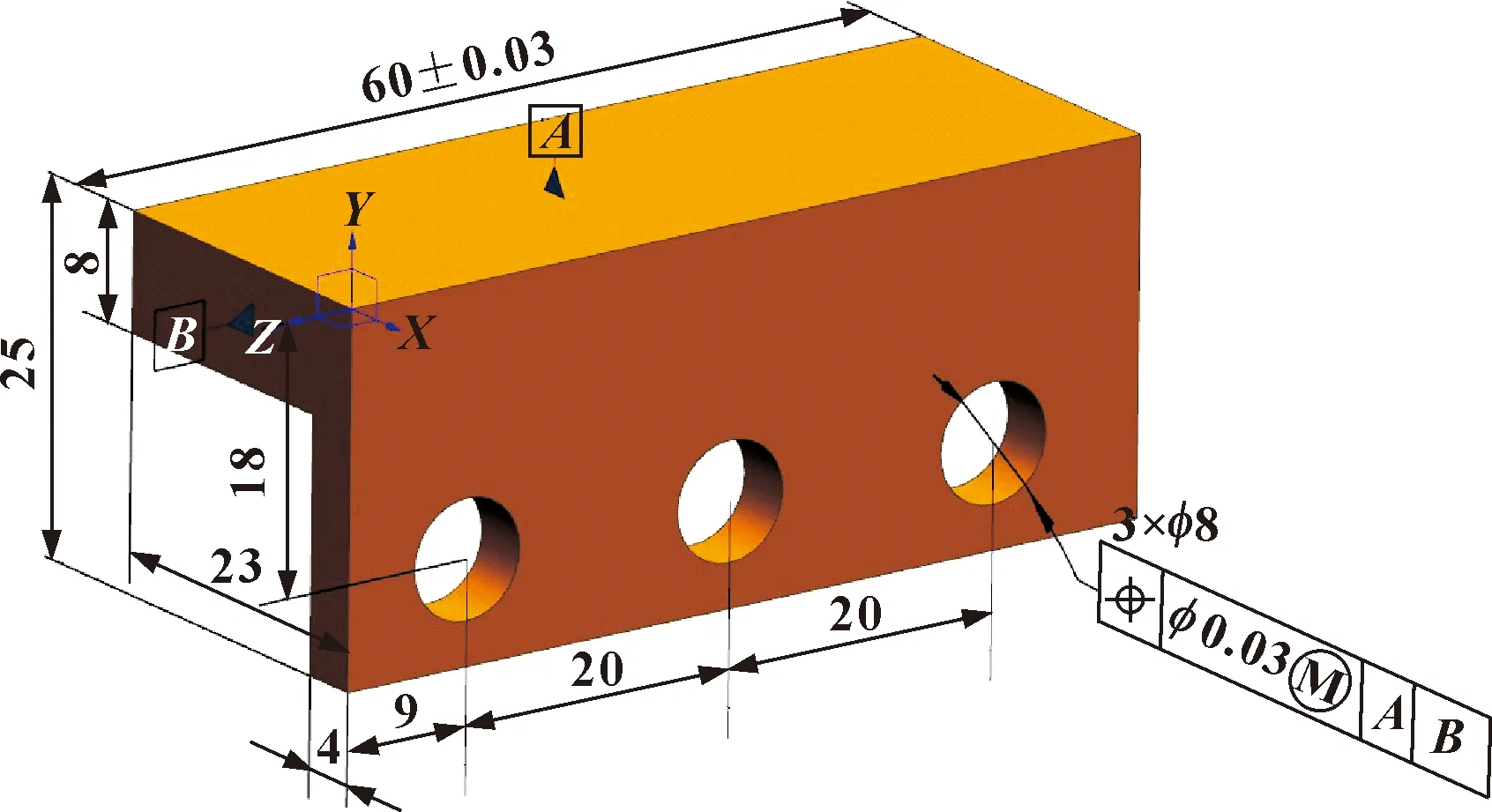
图1 基于MBD技术的零件模型
此数据集方法就是采用集合的方式来描述三维状态的GD&T、基准、几何要素以及零件坐标等零件PMI信息[17],然后采用关系矩阵来表示GD&T信息和几何要素之间的关联,以及基准和几何要素之间的关联。因此,构成数据集的基本元素可以由几何特征集Ch、标注集La和坐标集Co等三部分构成,即构成测量零件信息基本元素的集合Pa为
Pa={Ch,La,Co}
(1)
特征集Ch由一个或m个特征构成,其中每个特征由面集Fss、线集Lis和点集Pos等3种要素组成。Fss由1个或n个面构成,包括球面、圆柱面、平面(中心平面)、旋转面、螺旋面、棱柱面和复合面。Lis由1条或l条线构成,包括素线和中心线。Pos由1个或k个点构成,包括端点和中心点。上述特征到几何要素的拓扑过程可以表示为公式(2)(3):
Ch={Fs1,Fs2,…,Fsm}
(2)
Fsi={Fssi+Lisi+Posi}i=1,2,…,m
(3)
标注集合La由形位公差项目集合To、尺寸集合Tl和基准集合Da等三部分信息组成,如公式(4)所示:
La={To,Tl,Da}
(4)
其中:形位公差项目集合To由形状公差TF、定向公差TO和位置公差TLC组成,如公式(5)所示:
To={TF,TO,TLC}
(5)
一个形位公差框图里最多包括:公差类型FLToType、公差值类型FLToValueType、公差值FLToValue、公差基准Datum、公差值有公差原则FLToVaPrinciple、第一基准有公差原则DaPrinciple_1、第二基准有公差原则DaPrinciple_2、第三基准有公差原则DaPrinciple_3等信息,如公式(6)所示:
TO={FLToType,FLToValueType,FLToValue,FLToVaPrinciple,DaPrinciple_1,DaPrinciple_2,DaPrinciple_3}
(6)
尺寸集合Tl由尺寸类型DiType、尺寸值DiValue、尺寸公差值DiITValue、上偏差UpDeviation、下偏差LoDeviation等五部分组成,如公式(7)所示:
Tl={DiType, DiValue, DiITValue, UpDeviation, LoDeviation}
(7)
基准集合Da表示零件上可以标注一个或n个基准,如公式(8)所示:
Da={Da1,Da2,…,Dan}
(8)
坐标集合Co包括局部坐标和零件坐标,如公式(9)所示:
Co={Co1,Co2}
(9)
根据以上测量零件的数据集构成形式,为生成具有基准的某一公差框图中公差标注和基准标注的探测系统方案的先后顺序,有如下定义:
定义1:根据文献[11]中总结出的38种具体公差类型,假设将38种不同的公差项目标注在m个不同几何特征的要素上,则它们相互关联的映射关系可以用矩阵TMS,m×38表示,而对元素apq(p=1,2,…,m且q=1,2, …,38)有如下定义:如果公差项目与几何要素存在关联关系,则apq=1;否则apq=0,如公式(10)所示:
(10)
定义2:假设m个不同几何特征的要素与n种不同基准的关联关系可以用矩阵TMP,m×n表示,而对元素Rlk(l=1,2,…,m且k=1,2,…,n)有如下定义:如果基准与几何要素存在关联关系,则Rlk=1;否则Rlk=0,如公式(11)所示:
(11)
2 零件PMI信息表示的本体模型
为使计算机能够理解零件PMI信息表示的工程语义,实现异构CAx系统的知识重用和智能推理,主流的方法之一是采用OWL+[10-12]。因此,本文作者采用OWL+Jena的方法,建立能够被计算机自动读取和自动理解的本体模型,即术语模板,为自动生成探测系统方案奠定基础。
2.1 本体中的内容
零件信息的本体模型即采用基于本体的方法定义要素和标注等信息所需要的术语的本体模型。该模型是特定类(子类)和类(子类)的属性的有限集合。根据第1节中数据集和关联关系,可以建立零件信息的本体模型的有限集合。
(1)本体中的类,即表示一元关系的术语。根据公式(1)—公式(3)构建本体模型所需要的类,包括零件类(Part)、几何特征类(Characteristics)、要素类(Feature)、标注类(Label)和坐标类(Coordinate)。
(2)本体中的子类,即表示参与构成类的术语。根据公式(3)(5)(6)等构建测量零件信息表示的本体模型所需要的子类,如表1所示。
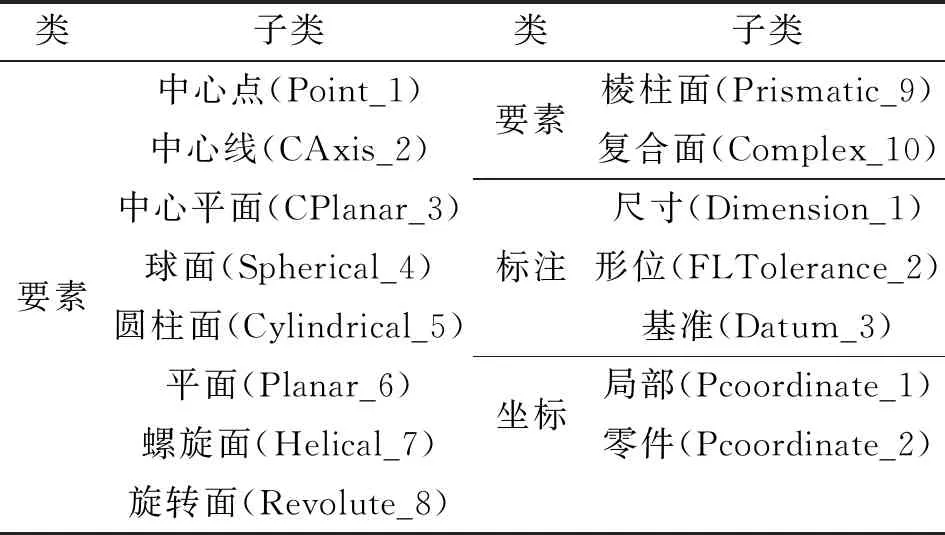
表1 本体的子类
(3)本体中的个体,代表由一个或多个参数精确定义本体中类或子类的实例。从MBD中直接获取个体名,如图2所示,面类Plannar_6有7种个体,分别记为Plannar_6-1、Plannar_6-2,…,Plannar_6-7,其他类也是如此。
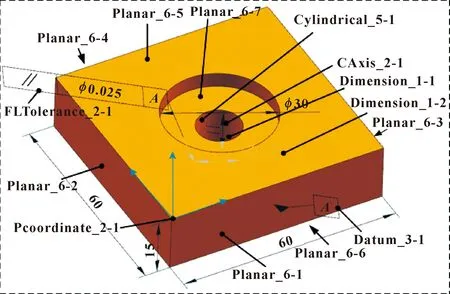
图2 零件的个体标记
(4)本体中的属性:对象属性表示个体与个体之间的二元关系,数据属性表示个体与数据的关系。例如在图2中,个体Cylindrical_5-1与个体CAxis_2-1属于对象属性,具有关联关系。
2.2 本体模型的基本结构
根据第1节中构建的信息模型和上述本体的知识,构建面向CMM探测系统智能配置的零件PMI信息本体模型如图3所示,其各属性的含义如下:
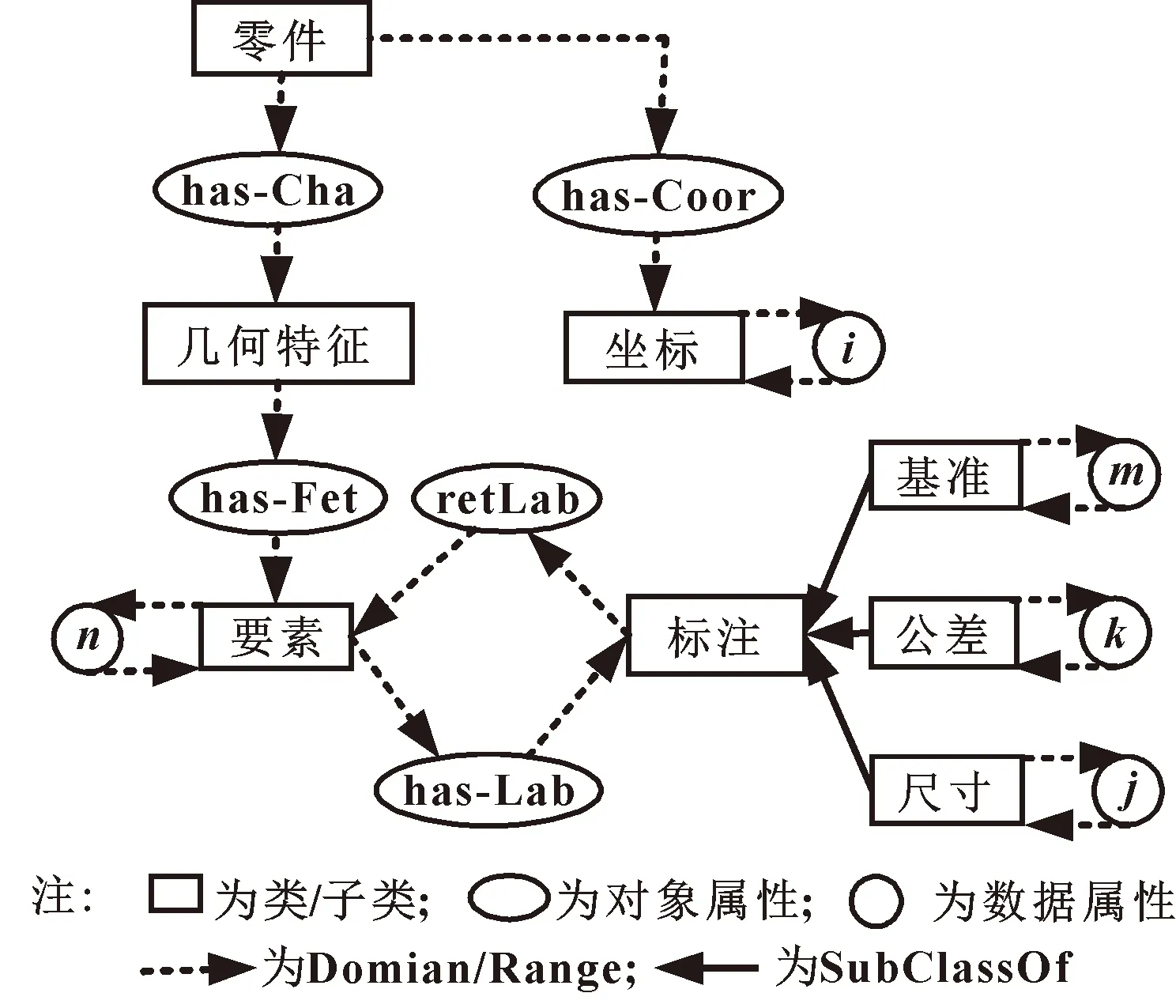
图3 本体模型的基本结构
(1)根据公式(6)构建数据属性k=FLToType,FLToValue,Datum,FLToVaPrinciple,DaPrinciple_1,DaPrinciple_2,DaPrinciple_3,分别表示公差类型、公差值、公差基准、公差值有公差原则、第一基准有公差原则、第二基准有公差原则、第三基准有公差原则。
(2)根据公式(7)构建数据属性j=DiType,DiValue,DiITValue,UpDeviation,LoDeviation,分别表示尺寸类型、尺寸值、尺寸公差值、上偏差、下偏差。
(3)根据公式(8)构建数据属性m=Datum,表示标注在要素表面上的公差基准。
(4)根据公式(9)构建数据属性i=Vector_i,Vector_j,Vector_k,分别表示坐标系X、Y、Z轴的位置和指向。
(5)根据公式(2)(3)(10)(11)构建零件PMI信息表示的本体模型所需要的对象属性,如表2所示。根据定义域和值域的属性关系,构建断言公式集,包括:要素和标注之间的从属关系断言公式集AA、尺寸标注的断言公式集AB、形位公差标注的断言公式集AC和基准标注的断言公式集AD。构建方法:例如令要素类(Feature)和标注类(Label),对象属性has_Lab表示要素与标注之间的从属关系。如图2所示,当圆柱面(Cylindrical_5)标注公差要求(FLTolerance_2)时,则表示为has_Lab(Cylindrical_5-1, FLTolerance_2-1),断言公式集AA为要素与标注之间的从属关系断言公式的有限集合。
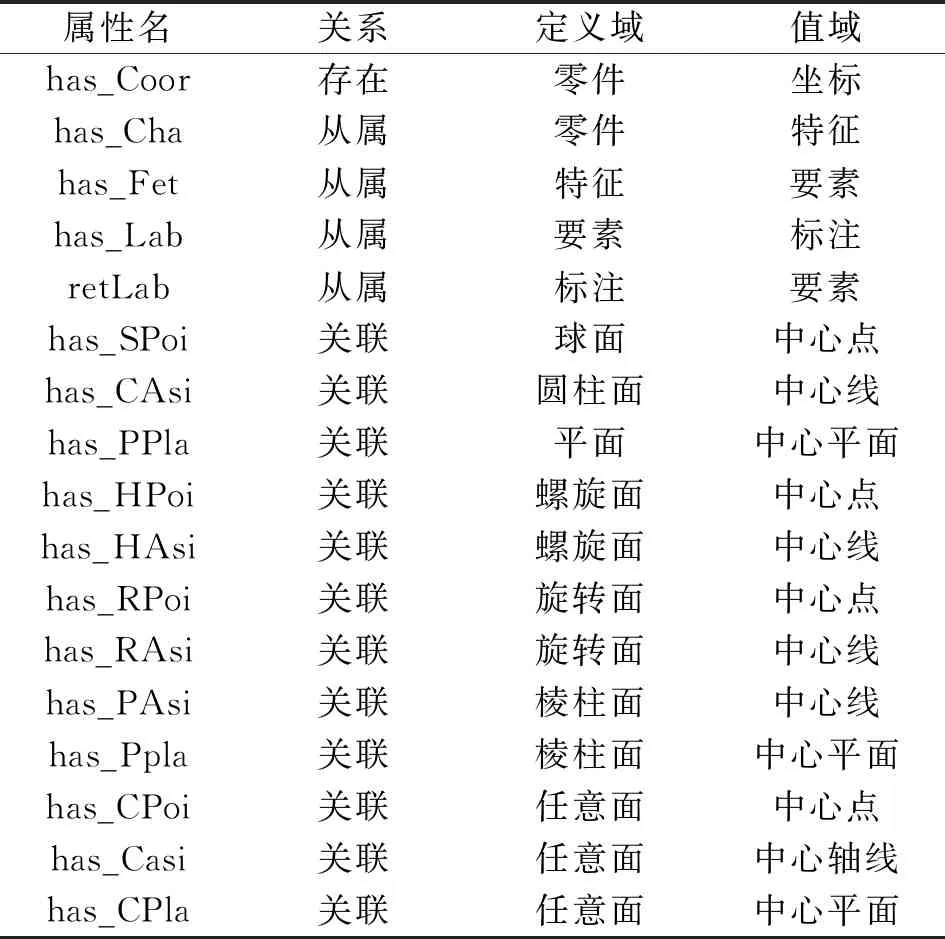
表2 本体的对象属性
3 探测系统的方案推理
此节根据以上零件PMI信息表示的本体模型,构建探测系统的本体。首先,分析公差框图中是否有基准,如果有基准,则推理公差要素和基准要素的探测系统方案的生成顺序;然后,分析公差指标、几何要素尺寸与探测系统方案的影响关系,构建探测系统的推理规则;最后,研究探测系统的智能配置方法。
3.1 公差标注和基准标注探测系统方案的生成顺序
同一个公差框图中,公差标注与基准标注一般在不同要素上,以实现零件形位公差的智能检测。根据测量原理以及基准优先级[4],推理公差标注和基准标注的探测系统方案的生成顺序,有如下定义:
定义3:公差框图中没有基准,生成公差要素的探测系统方案;
定义4:公差框图中有1个基准,如图2中的平行度,则生成的探测系统方案顺序为:先基准平面(A),再公差要素;
定义5:公差框图中有2个基准,如图1中的位置度,则生成探测系统方案顺序为:先第一基准平面(A),再第二基准平面(B),最后公差要素;
定义6:公差框图中有3个基准,则生成探测系统方案顺序为:先第一基准,再第二基准,其次第三基准,最后公差要素。
3.2 探测系统的配置推理规则
探测系统由测头、测座和探针等组成。测头是CMM的关键部件,不同测量零件需要选择不同精度和功能的测头[4]。接触式的测头通常分为接触式触发测头和接触式扫描测头。测头一般通过测座固定,把测头的信号传递到CMM中。为从零件信息推理探测系统方案,在零件PMI信息表示的本体模型的基础上添加探测系统内容,得到的本体称为探测系统本体模型。
构建类和子类以及个体。构建方案类(DetectionSystem);构建类的子类:测头子类(Top)、测座子类(Seat)。把接触式触发测头P20SF、TP7M、TP200、TP800和接触式扫描测头SP600系列(SP600、SP600M、SP600Q)、SP25、SP80、TRAX,设为测头子类的个体。如表3所示,A类表示M8+PAA#PH10M、M8+PAA#PH10MQ、M8+PAA#PH6M;B类表示自动更换测座PH10M、PH10MQ、PH6M;C类表示与测量机主轴直接连接(SP),设A、B、C为测座子类的个体。
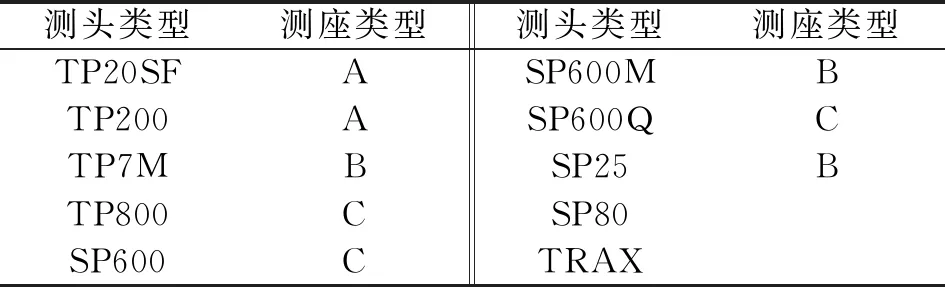
表3 测头和测座[4]
构建属性。对象属性has_Top表示关联关系,定义域为测头类、值域为标准类;对象属性has_Seat表示关联关系,定义域为测座类、值域为标准类。
构建推理规则。文中使用Jena的语法格式对选择规则进行编写和表示。
构建规则1~2。规则1:测量要素的基本尺寸值小于100 mm的零件称为小型;大于等于100 mm小于300 mm的零件称为中型;大于等于300 mm的零件,称为大型。规则2:尺寸公差值T大于IT8级称为低精度,否则称为高精度;形位公差值T大于IT8级称为低精度,否则称为高精度。例如[rule:(?x :DimensionValue ?a),math:lessThan(?a,’100’)->(?x :DimensionType ‘smallSiz’)].,含义为:测量要素的基本尺寸值小于100 mm的零件,要素尺寸为小型。
构建规则3:根据公式(6)得到一个需要测量的公差框图中是否有基准,由定义3~6设计公差标注和基准标注的探测系统方案的生成顺序,再根据定义1(定义2)得到公差标注(基准标注)对应的要素。
构建规则4~6。影响测头选择的因素如表4所示,其中:大、中、小表示零件的基本尺寸;高、低表示公差精度等级;对象D为尺寸公差、E为形位公差,“”表示该行测头的影响因素,当每行满足所有因素时才选择对应的测头。规则4[4]:当测量尺寸、间距或位置,不强调其形状误差,而且测量空间狭窄时,应尽量选触发测头。规则5[4]:扫描测头具有高速采集数据的优点,采集的数据不仅可以用来确定零件的尺寸及位置,更重要的是能用众多点来精确地描述形状、轮廓,特别适用于对形状、轮廓有严格要求的零件。规则6:当选择扫描测头时,其顺序为SP600、SP600M、SP600Q,例如[rule: (?x :DimensionType′middleSize′),(?x :PrecisionGrade ′lowPrecision′) -> (?x :has_Top :TP7M)],含义为:测量要素的尺寸时,一般精度且中型尺寸时选用触发测头TP7M。
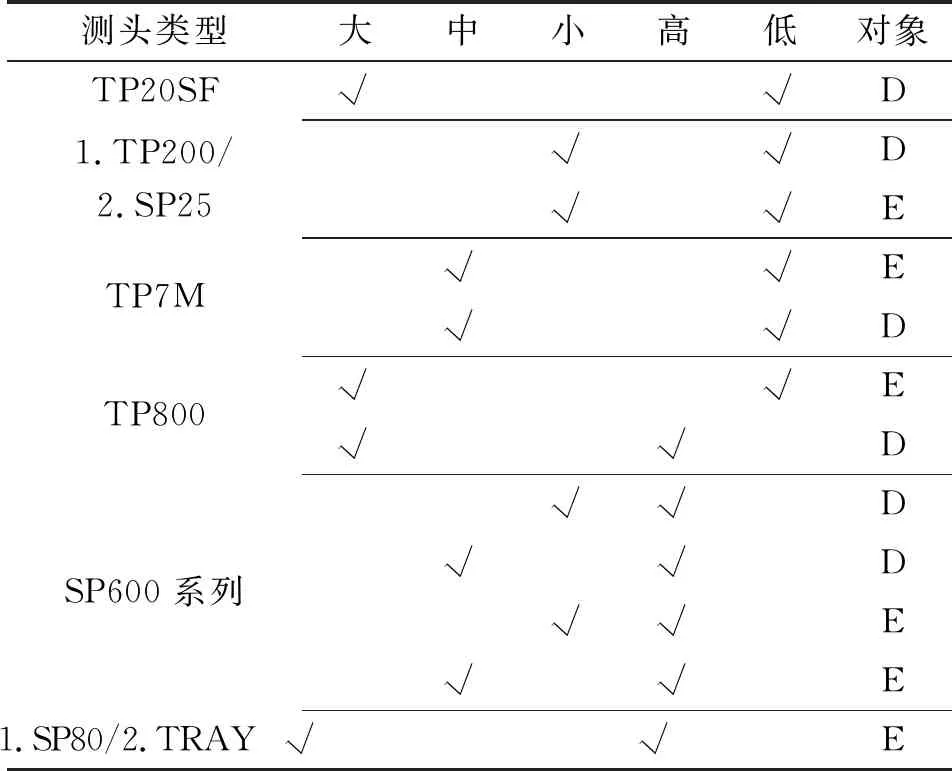
表4 影响测头选择的因素
构建规则7:在得到测头类型后,根据表3信息,推测测头对应的测座类型。
3.3 探测系统的智能配置方法
利用由CAD系统提取GD&T信息后直接生成.owl文件的算法,依照以上所建立的零件PMI信息表示的本体模型所生成的本体称为探测系统本体模型。将ontoSTEP本体与探测系统本体模型融合后,可得到包含PMI信息的探测系统本体。每次测量新的公差需要调用探测系统本体模型,实现了模型重用。在调用探测系统本体之前,先生成声明文本,其中包括命名空间声明与头部声明。
首先,调用探测系统本体模型。在本体中,类和属性共同组成术语,个体则作为实例。依照之前建立的本体模型定义的类和属性,获得的术语集文本可实现重用。其次,生成实例集文本。实例集文本实质上由定义块组成,这些定义块可划分为若干类别。对每一类别进行抽象与剥离,可得到不含个体信息的语块模板库。最后,从CAD系统中提取个体信息,与相应的语块模板进行组装,便可得到一个完整的定义块。如图4所示为圆柱面Cylindrical_5-1对平面Planar_6-1具有平行度公差的测量零件信息提取与转换过程。
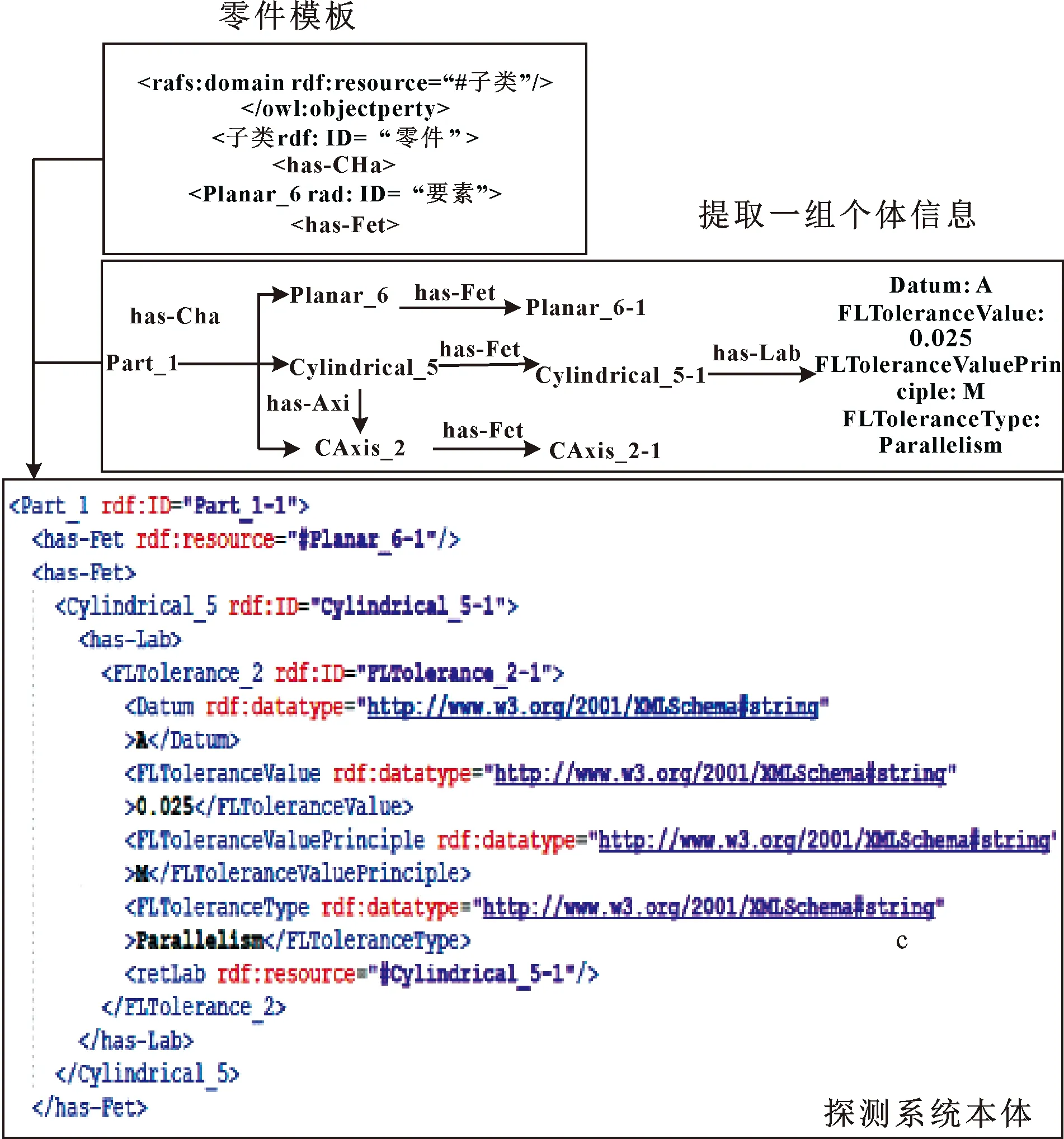
图4 测量零件信息提取与转换过程
Apache Jena是一个用于构建语义Web和链接数据应用程序的Java框架,它向用户提供通用规则以进行知识推理,输出合理推理结果。为实现探测系统方案的推理,则需要将基于本体的结构化知识和基于Jena的规则转化为Jena通用规则推理机所能理解和推理的知识。因此,本文作者采用Jena通用规则推理机实现探测系统的方案推理。具体推理流程如图5所示。
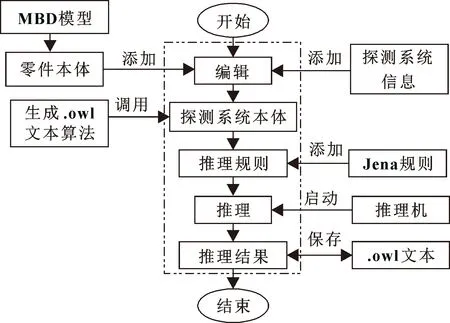
图5 推理的工作流程
(1)设计者基于MBD技术建立零件模型并将它存储在计算机中;
(2)由表2中的对象属性构建要素和标注之间的从属关系断言公式集AA;由数据属性构建尺寸标注的断言公式集AB、形位公差标注的断言公式集AC和基准标注的断言公式集AD;
(3)根据零件模型和探测系统本体模型,调用生成.owl文本的算法,生成包含个体的探测系统本体;
(4)在探测系统本体的基础上,将推理规则导入到知识库,选定需要测量的公差项目,推理得到该公差项目所需要的探测系统方案(记为AE),最后保存为本体.owl格式。
4 实例应用验证
在Eclipse环境下,使用Java语言开发探测系统的智能配置程序。利用某公司的凹模冲压零件的圆柱面(Cylindrical_5-1)形位公差对探测系统的智能配置进行验证,如图2所示。
基于MBD技术在软件UG10.0中建立零件三维模型,个体和属性标记如图2所示。根据零件三维模型和探测系统本体模型,包括:线的个体:CAxis_2-1和CPlanar_3;面的个体:Cylindrical_5-1、Planae_6-1;标注的个体:FLTolerance_2-1,Dimension_1-1,Datum_3-1;测头的10种个体和测座的3种个体。
断言公式集AA。根据要素与标注之间的从属关系以及表2对象属性,得到要素和标注之间从属关系的断言公式集AA:
AA={Cylindrical_5(Cylindrical_5-1), Planae_6(Planae_6-1), FLTolerance_2(FLTolerance_2-1), Dimension_1(Dimension_1-1), Datum_3(Datum_3-1), has_Lab(Cylindrical_5-1, FLTolerance_2-1), retLab(FLTolerance_2-1, Cylindrical_5-1), has_Lab(Cylindrical_5-1, Dimension_1-1), retLab(Dimension_1-1,Cylindrical_5-1), has_Lab(Planae_6-1,Datum_3-1), retLab(Datum_3-1, Planae_6-1)};
由图2中圆柱面的尺寸标注Tl={zhijing, 12}、形位公差标注To={Parallelism, 0.025, A}、基准A的尺寸标注Tl={xianxing, 60},根据数据属性得到尺寸标注的断言公式集AB、形位公差标注的断言公式集AC和基准的断言公式集AD:
AB={FLTolerance_2(FLTolerance_2-1), FLToType(FLTolerance_2-1, Parallelism), FLToValue(FLTolerance_2-1, 0.025), Datum(FLTolerance_2-1, A), has_Rla(FLTolerance_2-1, Cylindrical_5-1), Label_Tolerance(FLTolerance_2-1, CAxis_2-1)};
AC={Dimension_1(Dimension_1-1), DiType(Dimension_1(Dimension_1-1, zhijing), DiValue(Dimension_1(Dimension_1-1), 12)};
AD={Datum_3(Datum_3-1),Datum(Datum_3-1, A)};
智能推理探测系统配置。首先在探测系统本体模型上调用生成.owl文本的算法,得到包含个体的探测系统本体;然后,将推理规则添加到知识库;最后,推理得到测头和测座的可选类型。测量Cylindrical_5-1时的推理结果,如图6所示。先得到基准平面(A),再公差要素,即AE(Planae_6-1,Cylindrical_5-1)={has_Top(1.TP200), has_Top(2.SP25), has_Seat(A), has_Seat(B)}。根据推理结果可知:测量Cylindrical_5-1时,1.TP200表示优先选用触发测头TP200,2.SP25表示其次选用扫描及触发两用测头SP25;TP200对应的测座为A类(M8+PAA#PH10M,M8+PAA#PH10MQ,M8+PAA#PH6M);SP25对应的测座为B类(自动更换测座PH10M,PH10MQ,PH6M),最后生成.owl文件。由此可知,本文作者从10种测头和7种测座中智能选择合适的2种测头和其对应的测座。
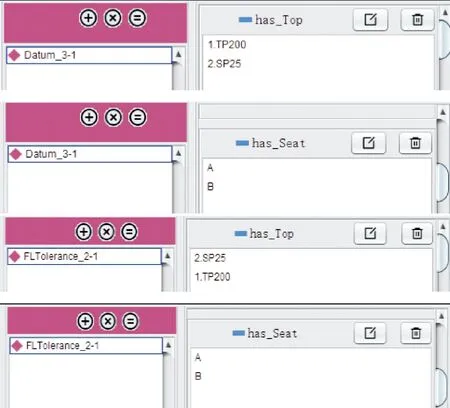
图6 推理结果
相同条件下,将基于多色集合理论的方法用于此实例[14],在2种接触式测头的类型中选择1种合适的测头,得到的测头型号为SP25。
考虑成本和满足测量要求的情况下,相比于扫描式测头,应优先选用接触式测头[4],则此实例中优先选用接触式测头(TP200)、其次选用扫描式测头(SP25)的结果更合理。因此,本文作者通过构建基于本体技术的知识库系统,不仅使零件信息工程语义能被计算机理解,实现语义传递,而且能够从多种探测系统配置中智能推理出合理的测头和测座。
5 结论
(1)本文作者研究了探测系统方案自动生成,其特征在于构建能被计算机理解的工程语义的探测系统本体模型;设计生成.owl文件的算法得到探测系统本体,构建探测系统方案选择的规则。
(2)以某公司零件为例,推理得出若干种可以采用的方案,与多色集合的方法相比,既能实现零件工程语义表示与传递,又能从多种探测系统的方案中智能推理出更合理的测头、测座方案供用户选择。
(3)进一步的研究可以从以下两方面着手:一是增加非接触式测头选择的本体;二是探测测头可达性分析。首先,应建立数学库,计算测量点数、点的位置和探针直径;然后,设计探针的数量、位置和方向;最后,分析测量某点的测头是否可达。
