机器人辅助甲状腺手术的临床研究
2022-10-12周力罗定存彭友张煜方阳时晶晶潘钢
周力 罗定存 彭友 张煜 方阳 时晶晶 潘钢
甲状腺癌是内分泌系统中最常见的恶性肿瘤,近十年来发病率不断升高[1],根据GLOBOCAN 2020的数据,全球甲状腺癌发病率占恶性肿瘤的3.0%,在女性中占恶性肿瘤的5.1%,高居第5位[2]。外科手术是治疗甲状腺肿瘤的首选方式,但开放手术将带来颈部永久性瘢痕,而甲状腺微创外科可以实现颈部无瘢痕,更加符合部分患者对美容的诉求。2007年Kang等[3]报道了机器人手术系统在甲状腺外科的应用,2014年贺青卿等[4]在国内率先开展机器人辅助甲状腺手术。浙江大学医学院附属杭州市第一人民医院于2021年引入了第四代达芬奇机器人手术系统,2021年7月—2022年2月运用该系统行机器人经双侧乳晕和腋窝途径(bilateral axillo-breast approach,BABA)入路甲状腺手术共55例,取得了良好效果;并与开放甲状腺手术进行了比较,以探讨机器人辅助BABA入路甲状腺手术的安全性和临床应用价值。现报道如下。
1 对象和方法
1.1 对象55例机器人辅助BABA入路甲状腺手术患者中,男9例,女46例,年龄17~58(33.42±9.38)岁,BMI为16.80~46.80(22.69±4.52)kg/m2。术前均行常规甲状腺B超检查及颈部增强CT检查,发现左侧结节20例,右侧结节27例,双侧结节8例,结节直径6.00(4.00,10.00)mm。参考2016版《机器人手术系统辅助甲状腺和甲状旁腺手术专家共识》[5],纳入标准:符合手术指征,直径≤5 cm的局限于颈部的甲状腺腺瘤和结节性甲状腺肿或伴囊性病变;肿瘤直径≤2 cm的甲状腺乳头状癌(papillary thyroid carcinoma,PTC);无气管、食管和血管神经等邻近器官侵犯;无颈部淋巴结广泛转移且肿大淋巴结无融合固定;上纵隔无淋巴结肿大;患者知情同意且有强烈的美容愿望。排除标准:颈部手术、颈部放疗史;拒绝实施机器人甲状腺手术患者;妊娠期或哺乳期妇女;颈部短平、胸廓畸形等;直径>5 cm的良性甲状腺肿块;肿瘤伴甲状腺外侵犯累及周围器官的分化型甲状腺癌;广泛颈部淋巴结转移或肿大淋巴结融合固定;转移的淋巴结囊性变;转移淋巴结直径>2 cm;甲状腺癌伴远处转移;甲状腺背侧肿瘤突出甲状腺被膜外;伴有严重凝血功能障碍、心肺功能障碍,不能耐受全身麻醉和手术者。所有纳入患者的手术均使用第四代达芬奇机器人手术系统,在固定手术团队共同协作下完成。
1.2 手术方法患者气管插管全身麻醉,取平卧颈部后仰位,肩背部垫高,双上肢置于两侧紧贴胸壁固定。术前标记切口位置、皮下隧道路径、手术区域。切口位置:取右乳乳晕旁1点钟、左乳乳晕旁11点钟弧形切口、双侧腋前线皱襞处切口,长度均为8 mm。皮下隧道路径:1号、4号穿刺器于两侧锁骨中线稍内侧处越过锁骨,2号、3号穿刺器于胸骨上窝下方2 cm处会合,见图1(插页)。常规消毒铺巾后,以切口为注射点沿预定路径向皮下注入肿胀液(0.9%氯化钠注射液500 ml+罗哌卡因40 mg+肾上腺素1 mg,混合均匀)60~100 ml,使用分离棒在深筋膜浅层沿预定路径分离,建立皮下隧道,分别置入穿刺器。2号穿刺器置入机器人镜头,充入二氧化碳(8 mmHg,流量15 L/min)(1 mmHg=0.133 kPa),待机器人入位连接后,1号穿刺器置入CADIERE抓钳,3号穿刺器置入超声刀,4号穿刺器置入MARYLAND双极镊。

图1 术前皮下隧道定位标志
直视下操作超声刀及抓钳游离胸骨上窝处疏松结缔组织,由近及远,游离于颈阔肌深面,根据手术需要,上至甲状软骨上缘,两侧至胸锁乳头肌,下至胸骨柄上缘。以超声刀或双极镊切开颈白线,操作机械臂两侧牵拉带状肌,显露甲状腺腺体,确认气管后,超声刀凝断峡部,向上一并切除锥体叶,游离环甲间隙,外侧显露并凝断甲状腺中静脉,暴露上极。双极镊末端连接神经监测夹,分离寻找喉上神经外支并避开它,然后以超声刀紧贴上极逐支凝闭甲状腺上极血管,切断游离甲状腺上极。沿颈动脉鞘内侧缘向内侧分离凝闭甲状腺下极血管,注意寻找并尽量原位保留下位旁腺,双极镊连接神经监测夹分离显露喉返神经全程,仔细寻找辨识上位旁腺并且利用MARYLAND双极镊或单极电剪刀精细解剖分离保留上位旁腺及其血供,将中央区脂肪淋巴组织连同甲状腺腺叶完整切除。符合右侧喉返神经后方淋巴结清扫指证者清扫该区淋巴脂肪组织,见图2(插页)。
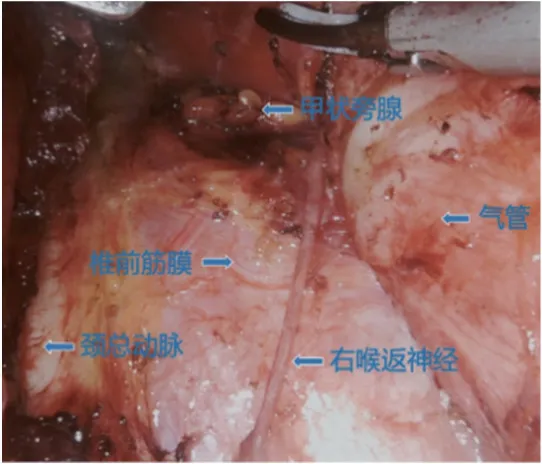
图2 右侧喉返神经后方淋巴结清扫
清扫侧颈区淋巴结时,游离显露颌下腺及二腹肌后腹,向后牵拉胸锁乳突肌,辨识副神经,完整切除Ⅱa、Ⅱb、Ⅲ区上部分淋巴结脂肪组织;打开胸锁乳突肌胸骨头及锁骨头间隙,注意辨识保护颈内静脉、颈总动脉、迷走神经、颈横血管、膈神经,自下而上切除Ⅲ区下部分、Ⅳ区淋巴脂肪组织,部分患者进一步清扫V区淋巴脂肪组织;静脉角处需注意淋巴管识别,超声刀凝闭或夹子夹闭分支,见图3(插页)。
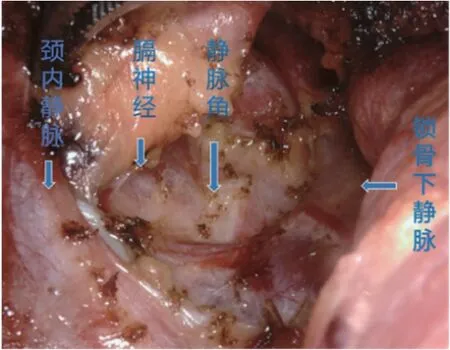
图3 Ⅳ区淋巴结清扫
使用取物器自左侧腋窝切口完整取出标本,分别送冰冻及常规病理。手术完成后,再次检查创面,严密止血,42℃蒸馏水反复冲洗术区,自左侧腋窝置入引流管后固定,4-0倒刺线缝合颈白线。移除机械臂,利用机器人镜头再次确认术区及穿刺器路径无出血。予4-0可吸收线缝合皮下,生物胶粘合皮肤,术毕。待患者复苏后送返病房。
1.3 观察指标记录患者一般资料,手术时间(以划皮至缝合完毕时间)、术中出血量、术后住院时间、术后并发症、术后病理报告等指标。
1.4 学习曲线拟合采用累积和(cumulative sum,CUSUM)法。将41例单侧甲状腺手术患者按手术先后顺序排列,以第n例患者的手术时间减去全部患者的平均手术时间,最后1例患者累积和为0,累积计算。以手术次序为横坐标,对应的累积和值为纵坐标,绘制学习曲线散点图,选取决定系数R2最接近1的拟合曲线为最佳模型[6-8]。
1.5 统计学处理采用RStudio(Version 1.3.1093)统计软件。正态分布的计量资料以表示,组间比较采用两独立样本t检验。偏态分布的计量资料以M(P25,P75)表示,组间比较采用Mann-WhitneyU检验。计数资料组间比较采用χ2检验。倾向性得分按1∶1最邻近匹配法进行匹配,卡钳值为0.02。相关性分析采用Spearman秩相关。P<0.05为差异有统计学意义。
2 结果
2.1 手术情况55例患者均顺利完成机器人辅助BABA入路甲状腺手术,无中转开放;其中双侧甲状腺大部切除术1例,单侧甲状腺腺叶切除6例,单侧甲状腺腺叶及峡部切除+中央区淋巴结清扫35例,甲状腺全部切除+双侧中央区淋巴结清扫6例,单侧甲状腺腺叶及峡部切除+中央区淋巴结清扫+侧颈区淋巴结清扫6例,甲状腺全部切除+双侧中央区淋巴结清扫+侧颈区淋巴结清扫1例。手术时间140~570(263.55±86.15)min,术中出血量2~50(10.13±7.44)ml,术后住院时间2~11(5.27±1.68)d。术后病理检查提示PTC 46例,结节性甲状腺肿9例。术后发生暂时性喉返神经损伤3例、甲状旁腺功能减退1例,未发生术后出血、永久性喉返神经损伤及甲状旁腺功能减退。术后中位随访时间4(1~8)个月,无甲状腺术区、淋巴结、皮下隧道复发或转移,55例患者对手术美容效果均满意,见图4(插页)。

图4 术后复查切口情况
2.2 淋巴结清扫情况46例PTC患者中有33例行单侧甲状腺腺叶及峡部切除+中央区淋巴结清扫,淋巴结转移率为48.49%(16/33),清扫淋巴结数量4.00(2.00,8.00)颗,转移淋巴结数0(0,2.00)颗。6例行甲状腺全部切除+双侧中央区淋巴结清扫,淋巴结转移率为33.33%(2/6),清扫淋巴结数量6.50(5.25,10.75)颗,转移淋巴结数0(0,1.75)颗。6例行单侧甲状腺腺叶及峡部切除+中央区淋巴结清扫+侧颈区淋巴结清扫,淋巴结转移率100.00%(6/6),清扫淋巴结数量31.00(20.00,33.00)颗,转移淋巴结数6.00(3.50,9.50)颗。1例行甲状腺全部切除+双侧中央区淋巴结清扫+侧颈区淋巴结清扫,清扫淋巴结14颗,转移淋巴结2颗。
2.3 机器人辅助BABA入路甲状腺手术与倾向得分匹配的开放手术淋巴结清扫情况的比较对46例PTC患者,按照性别、年龄、手术方式、病灶大小与开放手术病例进行倾向得分匹配,两组在淋巴结清扫数量、转移淋巴结数量上比较差异均无统计学意义(均P>0.05),见表1。
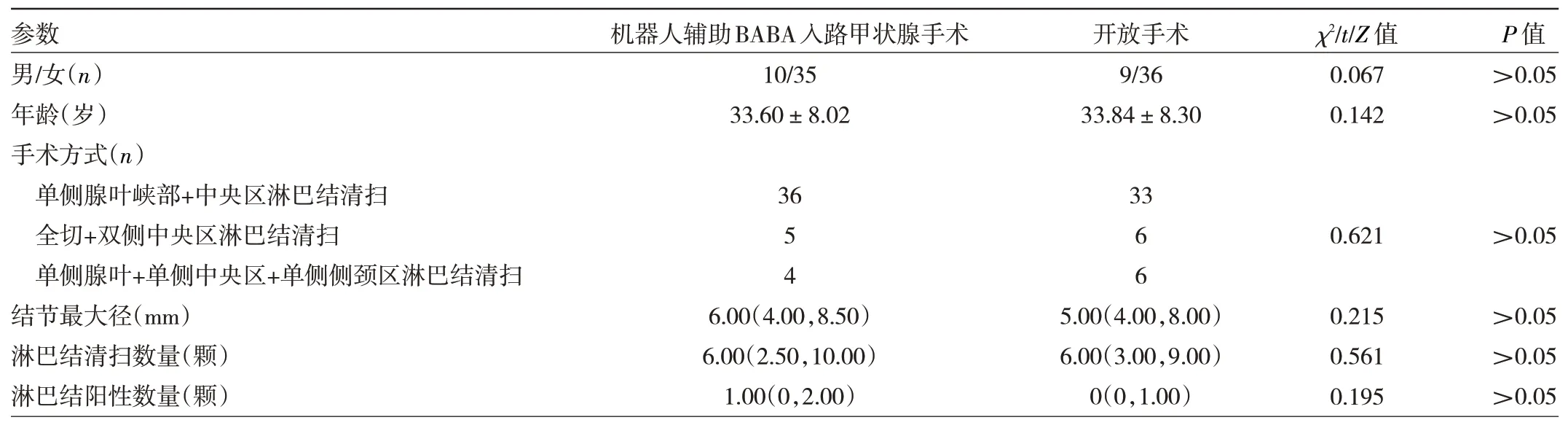
表1 机器人辅助BABA入路甲状腺手术与倾向得分匹配的开放手术淋巴结清扫比较
2.4 CUSUM学习曲线拟合及截点41例单侧甲状腺手术患者手术时间140~330(234.59±42.66)min。随着手术例数累积,手术时间呈逐渐缩减趋势。对CUSUM学习曲线进行拟合,拟合函数为y=85.2+22.7x-0.434x2-0.003 2x3,R2=0.73,P<0.01。拟合曲线峰值为第16例,即截点为第16例手术。以截点为界,学习曲线分为两个阶段,第一阶段(1~16例)为学习提高期,CUSUM值持续上升,表明手术团队尚处于熟悉磨合阶段;第二阶段(17~41例)为熟练掌握期,CUSUM值逐渐下降,表明手术团队已度过学习提高期,手术技巧相对稳定。累计完成16例手术为达到单侧机器人辅助BABA入路甲状腺手术平台期的最小手术量,见图5。

图5 CUSUM学习曲线
2.5 两阶段患者一般资料及手术相关指标对比两阶段患者的性别、年龄、BMI、结节大小、术后住院天数比较,差异均无统计学意义(均P>0.05);手术时间和病灶良恶性比较,差异均有统计学意义(均P<0.05),见表2。良恶性差异与学习初期多选取良性病例开展直接相关。比较两阶段中PTC患者(学习提高期9例、熟练掌握期24例)的中央区淋巴结清扫情况和清扫淋巴结数量,差异无统计学意义(P>0.05),阳性淋巴结数量比较,差异有统计学意义(P<0.05),见表3。表明两阶段淋巴结清扫的彻底性是一致的,阳性淋巴结数偏少是由于学习初期选取的是更低危、淋巴结转移概率更小的病例。

表2 两阶段患者一般资料比较

表3 两阶段PTC患者中央区淋巴结清扫情况比较(颗)
3 讨论
甲状腺微创手术具有美观、微创、并发症少及术后康复快等优点。因设备获取较易、价格相对低廉、美容效果较优,腔镜甲状腺手术在甲状腺微创外科有较为广泛的应用,不同入路腔镜甲状腺手术共识[9-11]及规范的出台也为其安全性与有效性提供了保障。达芬奇机器人手术系统具有三维、高清、放大10~15倍的手术视野,7个自由度的仿真手腕式的内关节(EndoWrist)手术操作臂,并能滤除人手的颤动,较之腔镜甲状腺手术有着独有的优势。Dong等[12]报道称韩国西富兰斯医院已累积完成4 000余台机器人甲状腺手术,国内李小磊等[13]也已完成了1 000余台机器人甲状腺手术,并对机器人甲状腺手术的适应证及操作技巧作出了积极的探索[14-18]。
本研究中所使用的第四代达芬奇机器人手术系统是目前广泛应用于临床的最先进的机器人手术系统,为术者完成甲状腺外科各项常规术式提供了可靠的设备支持。本研究中所采用的BABA入路是机器人甲状腺手术最常用的入路。BABA入路的手术视野与开放手术相似,术者能够更熟悉的识别解剖结构。BABA入路的机械臂布局更加合理,赋予了机械臂更大的活动范围,能够完成包括双侧侧颈淋巴结清扫在内的所有甲状腺手术常规术式。Shan等[19]通过荟萃分析对1 070例BABA入路与1 663例开放手术进行比较,结果发现两者在围术期结果及手术并发症上无统计学差异。本研究通过倾向得分匹配法比较了机器人甲状腺手术与开放手术在甲状腺癌根治术中的淋巴结清扫数量和转移淋巴结数量,结果显示两组无统计学差异。
对41例单侧甲状腺手术进行CUSUM学习曲线拟合,结果发现学习曲线截点为16例,显著短于Lee等[20]报道的40~50例(国外)以及孙寒星等[21]报道的35例(国内)的学习曲线截点。分析可能的原因:一方面,本研究使用的第四代达芬奇机器人较二代、三代达芬奇机器人操控系统更加智能、精细,可能有助于缩短学习曲线。另一方面,浙江大学医学院附属杭州市第一人民医院开展机器人甲状腺手术相对较晚,通过阅读理解专家共识,加强交流学习,在项目开展初期快速积累经验,更平稳地度过了学习探索阶段。同时本团队具有丰富的开放及普通腔镜甲状腺手术经验,有助于缩短BABA入路的学习曲线。随着团队配合默契程度提高,机器人入位、机械臂连接、术中穿刺器微调、镜头距离把控等环节逐步提升,使得手术时间明显缩短。根据操作习惯,本研究还对左右腋窝穿刺器的隧道路径进行了调整,增大了与2、3号穿刺器的间距,减小了与颈白线的夹角,既扩大了1、4号机械臂的活动范围,缩短手术时间,也有助于减少皮瓣牵拉,减轻术后局部麻木感。
在甲状腺手术中,神经及甲状旁腺的识别和保护是手术成败的关键。凭借机器人的三维高清视野,喉返神经、喉上神经等既可以通过肉眼辨识神经的特有光泽,也可以依靠神经监测的电刺激进行确认,神经的妥善保护得到保证。对于甲状旁腺及其血供的辨识,机器人5~10倍的放大视野较开放手术更加清晰,单极电剪刀精细解剖分离更容易保留上位旁腺及其血供。本研究7例甲状腺全部切除术仅1例出现暂时性甲状旁腺功能减退,比常规开放甲状腺全部切除术的概率低得多[22]。
甲状腺癌患者容易出现淋巴结转移,尤其是PTC;30%~50%的患者在手术时已出现淋巴结转移[23],所以,甲状腺癌的颈淋巴结清扫尤其需要重视。机器人EndoWrist机械臂可进行540°旋转,为甲状腺癌的颈淋巴结清扫提供了保障。右侧喉返神经后方淋巴结清扫一直是甲状腺外科的难点,主要是因为该区域容易牵拉喉返神经不易暴露;但是机器人凭借其可弯曲旋转的机械臂,通过适度牵拉淋巴脂肪组织使右侧喉返神经后方区域可视可及,没有盲区,彻底清扫淋巴结时与开放手术无差别。颈静脉角区域的淋巴结清扫则是甲状腺癌侧颈淋巴结清扫的重点,其不仅是侧颈淋巴结转移的主要部位,更是淋巴管汇聚的关键点,尤其左侧的胸导管需要保护或稳妥处理。充分显露是彻底清扫淋巴结和妥善处理淋巴管的前提,机器人的3D放大视野和可弯可旋机械臂为静脉角清扫创造了条件;抓钳提拉、双极电凝配合超声刀多重凝闭,必要时使用Hemolok钳闭较粗淋巴管,使处理该区域具备了独特优势。
机器人甲状腺手术具有其特有的优势,但由于费用相对昂贵、样本量较少、随访时间较短,暂还未能全面推广[24]。随着国产机器人手术系统的开发使用,机器人甲状腺手术的费用将逐步降低,随之而来的大样本及更长随访时间的比较,机器人甲状腺手术的安全性与可靠性将得到进一步提升。
