骨科手术机器人3D模式下辅助经皮固定骶髂螺钉的学习曲线
2022-10-09张天季滢瑶胡加林翁琪昊金亚平杨雷
张天,季滢瑶,胡加林,翁琪昊,金亚平,杨雷
1.温州医科大学附属乐清医院(乐清市人民医院) 骨科,浙江 温州 325600;2.温州医科大学附属第二医院 骨科,浙江 温州 325000
骨盆后环骨折是临床常见的骨折类型,常由高能量损伤导致,不稳定的骨盆后环骨折常导致高病死率和残疾率,一般需要手术治疗。骶髂螺钉内固定术由于微创并能够保障骨盆后环稳定而被广泛应用于骨盆后环损伤的手术中[1]。可是有研究表明骶髂螺钉的异位率较高[2],而且骶髂螺钉置入不准确会导致螺钉穿破骶骨周围骨皮质,从而损伤神经根和血管,给患者带来严重的并发症。其主要是骶骨变异较大,且周围神经血管丰富,包括骶管中的马尾神经、腰骶干神经及髂血管等[3]。为提高手术的精确性和安全性,骨科手术机器人辅助技术和三维图像被广泛应用于骨盆骨折经皮固定的手术[4-5]。而天玑骨科手术机器人辅助经皮固定的成功率也被证明较传统透视下徒手置钉成功率更高[6]。骨科手术机器人辅助技术要求术者熟悉其特殊的影像学设备、手术器械以及软件的操作方法,随着学习曲线的延长逐步完善骨科机器人辅助手术操作步骤,学习曲线逐步趋于稳定[7-9]。乐清市人民医院自2021年引进天玑II骨科机器人(见图1)及美敦力O2术中影像系统以来突破以往的2D模式的束缚,运用天玑II骨科机器人全新3D模式的特性,使用美敦力O2术中影像系统进行三维数字化图像数据采集,成像清晰,为临床提供了极大便利。本研究旨在探讨应用天玑II骨科手术机器人辅助经皮骶髂螺钉固定骨盆后环骨折的学习曲线和临床意义。

图1 天玑II骨科手术机器人系统
1 资料和方法
1.1 一般资料 选取2021年3月至2022年3月乐清市人民医院应用天玑II骨科手术机器人3D模式下辅助经皮固定骶髂螺钉31例单侧骶髂关节置入螺钉的患者,手术均由同一位高年资骨科医师完成。患者年龄23~71(41.1±13.6)岁。纳入标准:①经X线及CT检查,主要诊断为不稳定骨盆后环骨折的患者;②年龄18岁以上;③确诊为不稳定骨盆后环骨折;④符合骶髂螺钉内固定术的手术指征;⑤术前CT检查后为无明显移位的骨折或脱位。排除标准:合并严重的系统性疾病;术前骨盆不能完全复位,经CT评估无有效固定通道等不适合骶髂螺钉固定的患者。
1.2 方法
1.2.1 手术分组:将31例患者根据手术日期按时间顺序进行编号,分为前、中、后期3组,统计患者的手术时间、术中出血量、并发症及骶髂螺钉位置等资料。随着手术量的增加,手术时间在明显降低后趋于平稳,约第10例开始手术时间有明显缩短的趋势,将2021年3月至7月完成的第1至第10例设为前期组(10例),其中男6例,女4例,年龄25~67岁,2021年8月至11月完成的第11至第20例设为中期组,其中男5例,女5例,年龄23~61岁,第21至第31例为后期组,其中男4例,女7例,年龄25~71岁。3组患者年龄、性别差异无统计学意义(P>0.05)。
1.2.2 手术团队和手术方法:术者均为同一位高年资骨科医师,助手固定,护士均为经过机器人操作培训的机器人组护士。完善术前X线等影像检查(见图2),每例术前1 d将患者CT图像(见图3)导入主控台进行术前规划以缩短术中手术时间,手术采用全身麻醉,取仰卧位,常规消毒、铺单。使用天玑II骨科机器人(北京天智航医疗科技股份有限公司)进行辅助手术。患者示踪器牢固固定于对侧髂骨髂前上棘后方骨皮质上。机械臂以无菌保护套隔离,安装机械臂定位标尺及示踪器,术中用美敦力O2术中影像系统查X线透视定位后,进行三维数字化图像数据采集手术部位的图像,并将图像传输至主控台上。规划手术路径(见图4),在矢状位、冠状位及轴位确定螺钉位置及长度。机械臂根据光学定位系统指引运行至内固定入点位置。术者于入点切皮,置入导针(见图5),以X线验证导针位置准确后,沿导针置入空心螺钉置钉,进行3D图像扫描,确认螺钉位置良好。清洗手术切口,缝合伤处皮肤,手术结束。术后予完善骨盆正位、入口位、出口位片等影像资料(见图6)。

图2 术前骨盆正位X线片
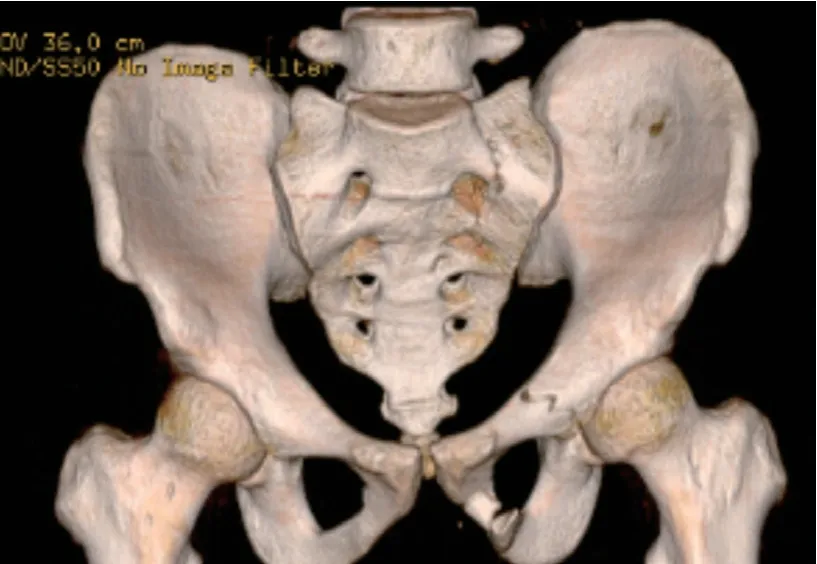
图3 术前骨盆CT三维重建图像

图4 规划手术路径
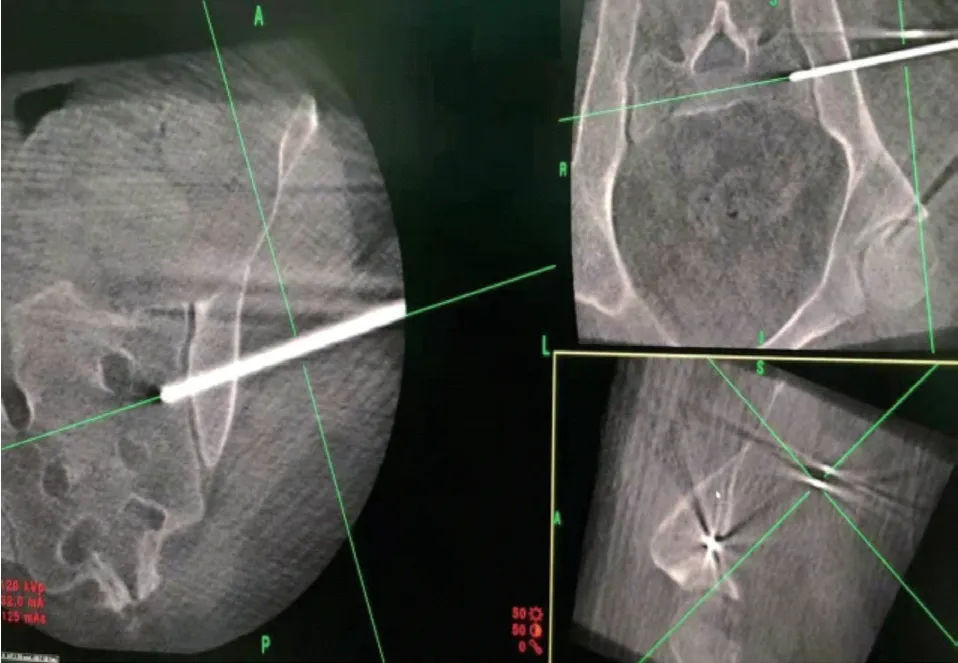
图5 置入导针

图6 术后骨盆正位、入口位、出口位X线图像
1.2.3 评估指标:手术时间(从切皮开始计时直至伤口缝合完毕)、出血量(术中出血量,术中纱布为小方纱,全部湿透为5 mL)。螺钉位置:导出置钉结束后采集的3D影像学检查资料,另一组未参与手术的医师根据GRAS分类[10]对图像进行评估,评估标准优为固定位置安全,螺钉全部在松质骨内;良为固定位置安全,螺钉未穿出骨面但贴近骨皮质;差为固定位置有误,螺钉穿透皮质骨。
1.3 统计学处理方法 采用SPSS28.0统计软件进行数据分析,计量资料以±s表示,3组间比较采用单因素方差分析,组间两两对比采用LSD-t法。以手术时间为因变量,病例编号、年龄、性别、术中出血量、螺钉数为自变量进行线性回归分析手术时间的影响因素。P<0.05为差异有统计学意义。
2 结果
3组患者均未出现骨科机器人相关手术并发症。天玑II骨科手术机器人辅助经皮固定骶髂螺钉的学习曲线表明,学习曲线前期较为陡峭,手术时间随着病例数的增加显著降低,在中期之后达到相对稳定,见图7。

图7 天玑II骨科手术机器人辅助经皮固定骶髂螺钉的手术时间
线性回归分析结果表明,病例编号(P=0.002)和螺钉数(P=0.003)对学习时间的影响差异有统计学意义,而年龄(P=0.115)、性别(P=0.354)、术中出血量(P=0.787)对学习时间的影响差异无统计学意义。本研究旨在探讨骨科手术机器人3D模式下辅助经皮固定骶髂螺钉的学习曲线,而螺钉数常由骨盆骨折类型决定,因此本研究重点探讨随着病例的积累对手术时间的影响。
3组间手术时间差异均有统计学意义(P<0.05),其中前期组与中、后期组手术时间差异均有统计学意义(P<0.05),中期组与后期组手术时间差异无统计学意义(P>0.05),见表1。3组间术中出血量差异无统计学意义(P>0.05),见表1。根据螺钉与骨皮质的位置关系,共置入螺钉37枚(35枚优,2枚良),无螺钉穿出骨皮质,3组患者置钉准确率均为100%。
表1 3组患者手术时间和术中出血量比较(±s)

表1 3组患者手术时间和术中出血量比较(±s)
与前期组比:aP<0.05
组别 n 手术时间(min) 术中出血量(mL)前期组 10 53.1±9.6 11.5±4.1中期组 10 38.1±2.1a 9.0±3.9后期组 11 34.9±4.0a 8.6±3.9 F 26.298 0.075 P<0.001 0.787
3 讨论
骨盆后环骨折因常伴有严重的失血和并发症致使患者病死率较高[11-12]。尽管近年来随着急救水平的提高,病死率显著下降,但文献报道该类患者的病死率仍高达10%左右[13]。因此,骨盆后环的复位和固定对骨盆骨折的预后非常重要。临床固定方法有很多,包括骶髂关节前钢板固定、骶后棒固定、经皮后路锁定钢板固定、骶髂螺钉固定等。骶髂螺钉固定与骶后棒和经骶钢板固定相比可降低感染风险,且具有更好的稳定性和更少的创伤风险[14-16],是一种有效的微创治疗方法。然而,骶骨变异常导致骶髂螺钉置钉困难,骶髂螺钉的异位容易导致神经血管损伤[2-3],骨盆后环骨折的微创手术发展受到制约。
有研究表明基于CT的术前计划可以提高骶髂螺钉的准确性及成功率[17]。本研究31例患者均于术前1 d将骨盆CT导入于天玑II主控台进行术前规划,拟定螺钉通道及直径,以缩短手术时间。传统的C臂X线会受到肠道积气等因素的影响,会干扰医师的判断,而术中3D模式可以提供出色的图像质量,即使在骨盆等复杂的解剖区域,也更容易评估骨折减少和植入物的位置[18]。而骨科手术机器人辅助经皮固定骶髂螺钉也被证实较传统徒手置入具有更加精准、减少透视时间等优势[19-21]。
本研究应用骨科手术机器人3D模式来辅助骶髂螺钉固定骨盆后环骨折,进一步提高了置钉的准确性,缩短了手术时间,但在临床应用方面仍存在一定的问题。术中容易造成时间延长的主要原因有:①对侧髂骨的示踪器固定不牢,或术中术者误触导致示踪器偏移,示踪器偏移后需要二次规划;②坚硬的髂骨外板容易使导针打滑,造成进针点的偏差;③规划的路径角度太大,术者操作空间狭小。基于以上的问题,术者的经验是:①确认示踪器牢固固定后,由洗手护士保护及监测;②充分切开软组织,使套筒抵至髂骨外板骨面,导针打入后,运行机械臂做轴向运动以验证导针方向;③将患侧紧贴床沿,结合患者体位规划置钉角度,必要时可规划2枚螺钉方向,视术中情况进行及时调整。本次研究纳入由同一名术者连续完成的机器人辅助经皮固定骶髂螺钉31例,对该技术的学习曲线进行评估,将病例分为3个阶段,前期为病例1~10,中期为病例11~20,后期为病例21~31。对该技术的学习曲线进行评估,骨科手术机器人辅助经皮骶髂螺钉固定手术的学习曲线在10例后趋于稳定,前期的手术时间较长与操作骨科手术机器人的熟练程度不足、人员之间的配合生疏等因素有关,随着手术团队对机器的熟悉、配合的默契以及流程的优化,这些问题不会持续存在,手术时间也会随着手术例数的增加而显著降低,螺钉的精准度也会高于传统方式。因此,天玑II骨科手术机器人3D模式下辅助经皮骶髂螺钉有很高的临床应用价值。
