太阳能单轴跟踪结构和控制系统研究
2022-09-29张旭东杨林杰曹延军
张旭东,张 磊,杨林杰,曹延军
(1.郑州机械研究所有限公司,河南郑州 450052;2.西安工程大学机电工程学院,陕西西安 710045)
太阳能无毒无污染零排放,是比较清洁的能源。目前使用广泛的有四种太阳能光伏跟踪装置,包括水平单轴跟踪、双立柱斜单轴跟踪、垂直单轴跟踪和双轴跟踪[1-3]。一个设计合理的跟踪装置可以提高40%的光伏发电效率。文献[4]以阈值角度为基本控制量,每步控制间隔均与太阳运行速度变化相关,虽能实现对日跟踪,但控制过程过于频繁,精度也有待提高。文献[5]采用双轴交替式余量型变频跟踪,以视日运动轨迹模型为基础,光线与光伏组件平面法线的夹角为被控量,容许偏差角为衡量条件,实现双轴对日跟踪,但跟踪精度有待进一步提高。针对上述问题,本文以太阳高度与光伏组件法线之间的夹角偏差为参考量,根据参考量确定高度角电机是否运动,设计了一种单轴跟踪装置和控制系统,致力于提高太阳能发电的效率。
1 高度角计算
计算某地太阳的位置也就是计算太阳对于地球上某点的相对高度角。该角度是由观测点的地理纬度、季节(年、月、日)和时间三个因素来共同决定的[6-7]。通常以地平坐标系以及赤道坐标系同时表示太阳的位置,即以高度角h、赤纬δ和时间t表示[8]。利用已知数值以及球面三角形定理,可得出太阳高度角h的计算公式:

2 跟踪装置机械结构
2.1 光伏板支撑结构的设计
光伏板支撑结构包括两个支持柱、一个横轴、L 形支撑和支撑柱,如图1 所示。支持柱的目的是将光伏板固定于其上,在其两端各开一个通孔,通过螺丝将光伏板固定在其上,中间也开一个通孔。为了减轻整个支撑结构的质量,同时也应该具有一定的强度,支持柱选择适当厚度中空的铝管。L 形支架一端固定轴承座,另外一端跟支撑轴固定在一起。材料采用铝合金,既轻便又满足强度要求。横轴上装有轴承,横轴可以旋转,带动光伏板摆动。支持柱与光伏板固定在一起,通过L 型支架,整个支撑结构固定在支撑轴上。

图1 光伏板支撑结构
2.2 高度角跟踪装置的设计
高度角主要目的是使整个装置能够上下摆动,即装置获得高度角的变化,其应该有动力部分和合适的机械结构部分。该装置主要包括横轴、大齿轮、小齿轮、电机、皮带、L 形支架、带座轴承。横轴主要作用是连接两个支持柱,在两端开有通孔,支持柱通过通孔从其中穿过。另外在通孔的垂直位置开有一个较小的通孔,这样当二者装在一起时,可以用螺丝穿过两个通孔,这样通过两个自由度的限制将二者紧密相连。横轴上开有轴肩,轴肩开在轴中心的一侧。在装配时,为了保证整个装置的平衡性,故将整个轴的重心偏向一侧。横轴承受整个上部结构的质量,同时考虑加工的条件限制,所以本装置选用实心的铁棒。本文带轮选择材质为铝质,型号为BF。大齿轮内径17 mm,模数M=1,齿数60;小齿轮内径为6.35 mm,模数M=1,齿数为30,都是带挡边。轮上开有M2 的通孔,固定此带轮。相配合的带型号为MXL,中心距为80 mm,带宽为10 mm。
大小带轮的设计传动比是2。小带轮为主动轮,固定在电机轴上,与电机轴采用间隙配合,基孔制,配合H7/h6。轴的公差等级为6,加工尺寸为孔的公差等级为7,加工尺寸大带轮固定在横轴上,大带轮和轴仍然采用间隙配合,配合采用H7/h6,轴的公差等级为6,加工尺寸孔的公差等级7,加工尺寸
此处的L 型支架与图1 中支架形状类似,尺寸略不同。其应满足一定的强度,保证电机能够牢固固定和稳定运转。电机通过一个底座与其固定,支架上开有M4 的孔,用来固定电机。整个高度角支撑和动力结构如图2 所示。
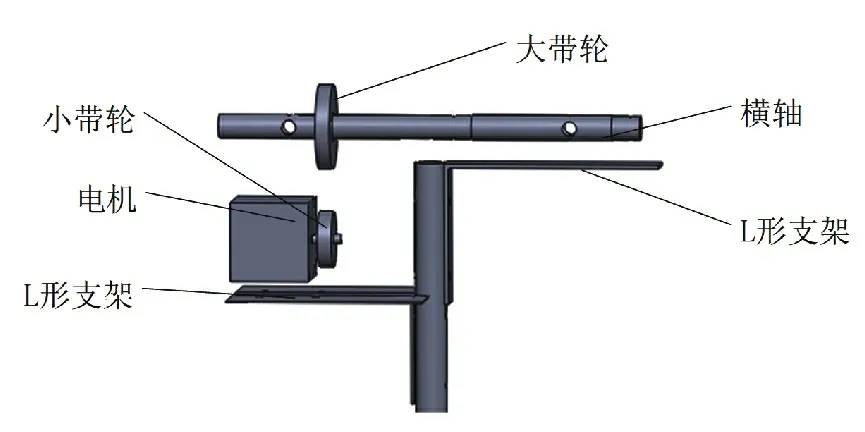
图2 高度角部分结构
2.3 跟踪装置的设计校核
高度角跟踪装置受光伏板、风力载荷的作用。高度角动力系统需要克服的载荷包括支架的摩擦阻力矩、风阻力矩、重力不平衡力矩和惯性力矩,跟踪装置的总力矩T见式(1)。

式中:Tm为旋转支架摩擦阻力矩;Tw为坡阻力矩;Tn为重力不平衡力矩;Tg为惯性力矩,这里惯性力矩忽略不计。
光伏板的转动是靠装在支架上的KP003 的带座轴承完成的,虽然滚动摩擦力比较小,向心轴承的径向摩擦Tra就是Tm。

径向轴承的摩擦阻力矩Tra为:

式中:Fx为径向轴承承受的水平力,N;ux为径向轴承的摩擦系数,ux=0.015~0.02;dx为径向轴承的内径,m。
带入参数计算可得,摩擦阻力矩Tm=0.1 N·m。
由于光伏板面积比较大,所以不得不考虑风力载荷和风力,风力载荷力矩为Twi。

式中:Cm为方位力矩系数;Kh为风压高度变化系数,在此取值1;q为风压,q=v2/16,v为风速;A为物体垂直于风向的迎风面的面积,m2;D为迎风面高度,m。
风载荷作用于光伏板上的阻力为:

式中:Cx为风阻力系数。
设风速v=15 m/s,风阻力系数Cx=0.242 0,方位力矩系数Cm=0.139 2。光伏板整个面垂直于风的方向A最大,为了考虑实验余量,A取最大值,A=0.34×0.41=0.139 4 m2。惯性力矩这里比较小忽略不计,带入数据得Twi=0.1 N·m。
加在高度角轴上的力主要是光伏板的重力,高度角轴转动的中心跟光伏板重心大部分时间不重合,就必然产生重力不平衡力矩。
重力不平衡力矩为:

式中:m为光伏板及其附件的质量,kg;Lmax为最大的不平衡力臂,m。光伏板及其附件结构质量为2.5 kg,Lmax最大为0.04 m。
经过计算Tn=0.98 N·m。摩擦力矩和风阻力矩带入,经过计算T=1.18 N·m,据选用的电机传动比为2,静力矩为2.5 N·m,所以选用电机合适。
本文采用的是按照扭转强度校核轴的强度,如果还受到不大的弯矩时,则用降低许用扭转切应力的办法予以考虑。在做轴的设计时,通常用这种办法估计轴的轴径,有时对于不太重要的轴,也可以作为最终的计算结果。轴上运行的功率为:

式中:P为功率;T=118 N·mm;n=37.5 r/min,得P=9.3×10-4kW。
初步估算轴最小直径为:

式中:A0为按许用应力定的系数,带入数据得最小直径为3.27 mm。本文为了设计选材的方便,选用的最小直径为17 mm。
经设计校核以后加工出来的结构如图3 所示。
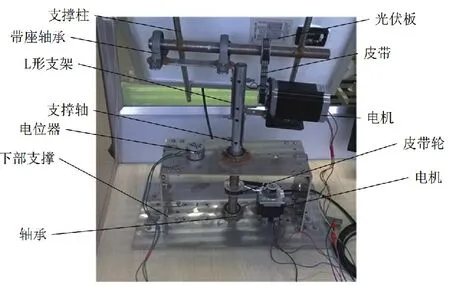
图3 机械结构装配图
3 跟踪控制系统设计
为了便于控制的实现,本系统设计了上位机和下位机软件来实现对数据的接收处理以及发送。一个是在上位机使用的上位机控制界面,一个是在下位机OK6410 上使用的控制界面,如图4 和图5 所示。

图4 上位机界面
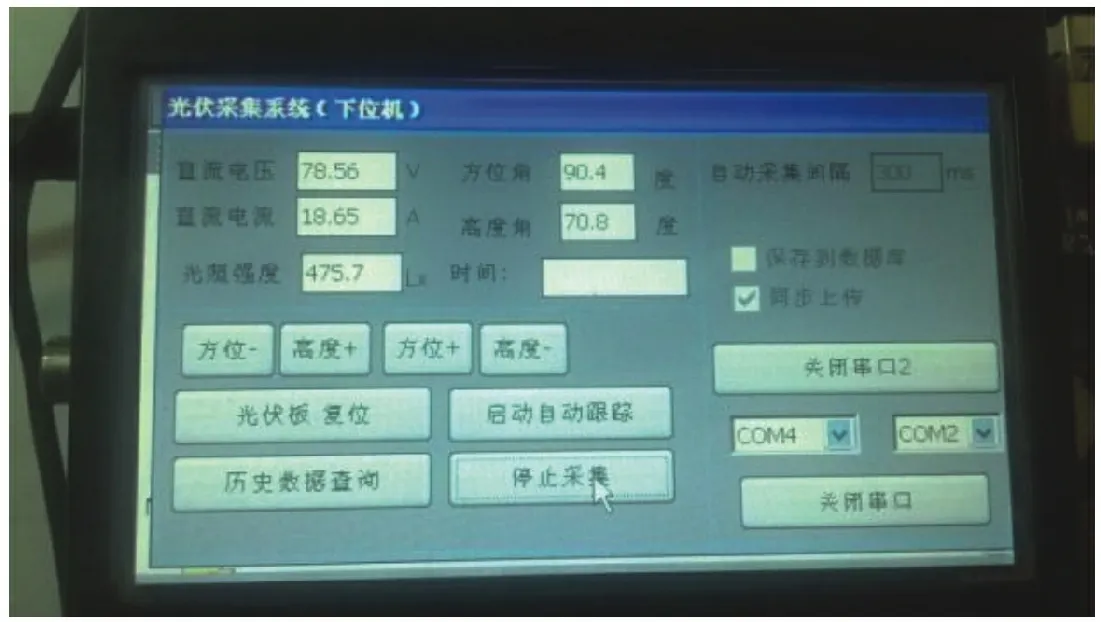
图5 下位机界面
首先将所有需要的信号采集到下位机,下位机对数据进行处理,将其显示在界面、上传给上位机、存储、供跟踪调取。启动自动跟踪就是光伏板按照设定好的程序运行,此处采用的办法是设置一个定时器,在定时器里设置好能控制系统自动跟踪的程序,当用户点击启动自动跟踪按钮时,启动该程序。定时器的主要作用是对比采集到的高度角与相应时刻的地理高度角,找到差值,然后将差值转换成相应的脉冲,控制电机运转正反转,确保光伏板在正确的位置。本跟踪系统利用的西安的地理经纬度对日进行跟踪。当计算出了地理高度角,同时通过传感器获得了某一时刻的高度角,就需要将二者对比,实现对光伏板角度的校核。当然考虑到实现的智能化,将8:00—18:00 分成若干等份,每隔15 min 启动一次跟踪。跟踪流程如图6 所示。
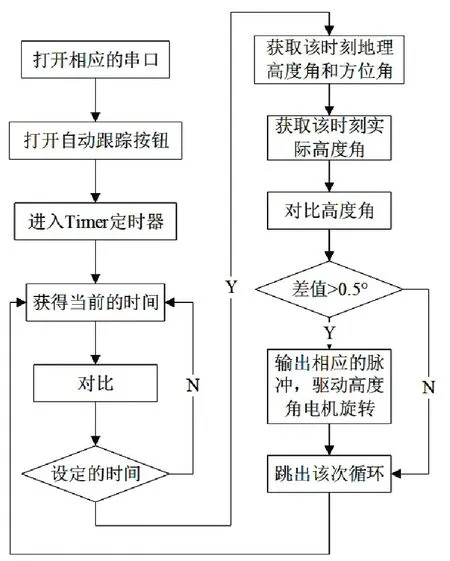
图6 智能跟踪流程
4 实验测试
单轴跟踪系统硬件部分主要包括太阳能光伏板、太阳能光伏板支架、数据采集卡、OK6410、分流器、直流电压变送器、直流电流变送器、Zigbee、高度角传感器、电位器、电机、直流电源。图7、图8 分别为高度角跟踪图像以及误差图像,可以看出高度角在初始跟踪处会产生较大的误差,但是稳定产生的误差基本在0.5°以内,由于系统设定的是0.5°才会启动电机,所以从图8 可以看出跟踪十分精确。
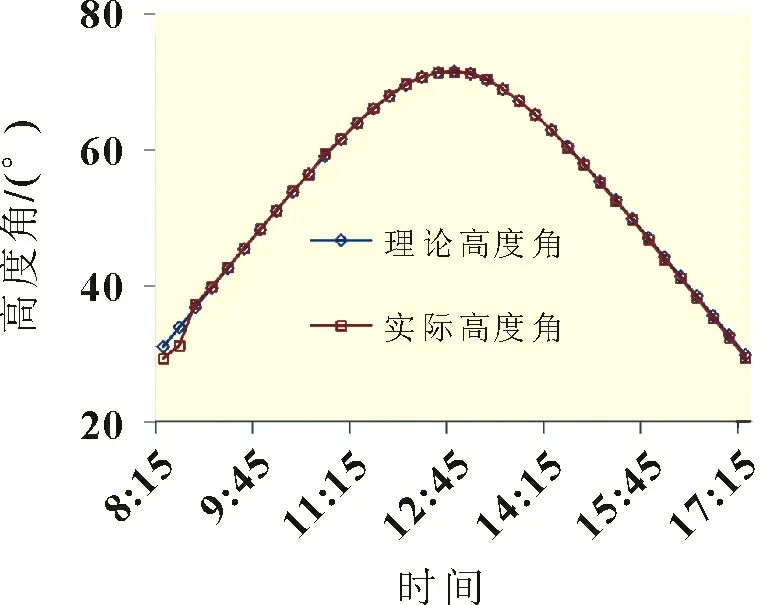
图7 5月27日高度角跟踪值

图8 5月27日高度角误差值
本跟踪系统设计的高度角需在29.5°以上,但冬天高度角变化不大,且值比较小,所以只取10:45 到13:45 的数据,从图9、图10 可以看出跟踪结果比较精确,虽在13:00 处有一处明显错误,但是不影响整体结果的准确性。

图9 11月6日高度角跟踪值

图10 11月6日高度角跟踪误差
5 结论
本文通过对地理高度角的研究,总结其随时间变化的特点,提出了基于地理高度角的间断跟踪方法;根据太阳能跟踪实验装置的要求,设计了单轴跟踪支架;完成了太阳能自动跟踪上位机软件以及下位机软件设计,开展了对日跟踪实验。结果表明设计的结构和软件系统能够满足跟踪的要求,并具有较好的稳定性。
