一种衬里复合管修形机器人的设计与研究
2022-09-22成旭堂练章华谷天平
成旭堂,练章华,谷天平
(西南石油大学油气藏地质及开发工程国家重点实验室,四川成都 610500)
0 前言
在油气集输管道建设中,为了防止腐蚀性油气对长输管道带来的危害,常采用双金属复合管来有效控制腐蚀,大幅度节约了油气集输的建设和维护成本,得到了广泛应用。但双金属衬里复合管衬管壁厚很薄、衬管刚度很小,在外界载荷作用下衬管很容易出现薄壁结构刚度失稳产生鼓包的现象。复合管衬管鼓包会降低衬管的疲劳寿命、阻碍管道通球作业以及使得管道预防性内检测工作无法有效开展,无法了解管道运行的实际状况;同时,会降低管道的运输能力,甚至会导致双金属衬里复合管整体管段失效。
因双金属衬里复合管的工作环境及自身管体长的特点,衬管一旦产生鼓包依靠人工修复非常困难,所以需要一种管道机器人携带必要的作业工具到达鼓包部位,展开修复作业。管道机器人具有体积小、运动灵巧、工作能力强等优势,可以携带不同的传感工具、定位系统及必要的工作工具,通过计算机、手机等设备远程操控,可轻松实现复合管衬管鼓包检测、修复以及后续清理等工作,并实时传输数据,以方便工程师后期处理分析。因此,设计一种双金属衬里复合管衬管鼓包修形机器人具有十分重要的工程价值及意义。
1 修形机器人整体结构设计
1.1 设计要求
要求修形机器人可以依靠自身所带电池动力,在衬里复合管内自由移动工作。机器人可依靠支撑机构平稳支撑在管壁,在移动过程中可以利用检测模块对复合管衬管鼓包部位进行实时检测;然后,将数据经控制系统传输到计算机终端进行处理;最后,返回控制数据流到主要修形工作模块,通过机械滚压对衬管鼓包部位进行修复处理。因此,机器人至少需要有导向、修形、控制和行走四大基本模块。图1所示为修形机器人设计流程。

图1 机器人设计流程
1.2 修形机器人总体设计
(1)总体框架
基于目前管道机器人的结构特征,考虑衬管鼓包位置不确定性及衬管内复杂的环境因素,在满足整体设计要求情况下,将各个模块合理化设计连接。图2所示为修形机器人总体结构框图。

图2 机器人总体结构框图
(2)工作原理
为同时保证复合管修形机器人在复合管内修复鼓包和行走的功能,设计了两条传动链:一条是主要修形动力传递,完成对衬管鼓包的修复;另一条是驱动行走机构扩径及使整个机器人在管道内的行走。整个机器人通过前导向机构中弹簧自适应机构和后三角履带行走机构稳定地爬附在管壁,在行走机构驱动下在复合管内连续行走,前端CMOS图像传感器实时检测衬管内壁情况;当检测到鼓包位置时,主修形电机开始旋转,使修形机构后座发生轴向运动的同时带动可变形支架发生径向扩张;当修形滚子与鼓包部位接触后,修形机构后座与丝杠轴段“锁死”,处于动态扩径平衡状态,进而带动整个修形机构进行旋转滚压修复衬管鼓包部位,直至修形机构后座到上极限位置,达到将衬管鼓包修复的目的。同时,当衬管鼓包修复后,衬管鼓包大小及修复数据自动记录到衬管鼓包修复信息数据库,随后修形装置解锁发生轴向收缩,修形机器人则继续在衬管内移动检测完成既定任务。图3所示为修形机器人总体结构示意。
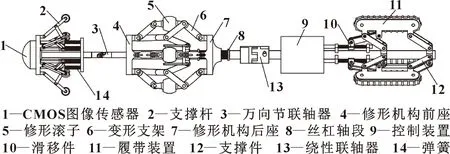
图3 机器人总体结构示意
2 各部件模块设计
2.1 前导向机构模块
(1)自适应管壁支撑机构
机器人前导向机构要求能适应不同管径的衬里复合管、跨越一定管内障碍并支撑机器人行走和导向的功能,因此采用弹簧自适应机构进行设计。在实际复合管管道内修形机器人行走过程中,应尽量降低底盘的高度,保证机器人质心下降,以增加机器人工作的稳定性。考虑管道尺寸以及结构最简,使用低副连杆机构。这种接触对连杆等部件冲击力小,但承载能力强、加工容易,可以很方便地改变运动的行程。图4所示支撑机构运动简图,当点处滚子受到的衬管内壁竖直方向反作用力发生变化时,将导致连杆与水平方向的夹角发生变化,进而改变的大小,最终使得弹簧产生轴向伸缩运动,以达到自动调节变径的目的。图5所示为支撑机构模型。
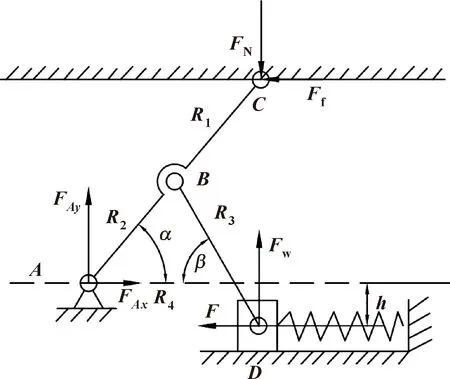
图4 支撑机构运动简图

图5 支撑机构模型
根据图4对弹簧自适应机构进行动力学分析,可计算出支撑杆滚轮对复合管衬管内壁正压力。
滚动产生摩擦力:
=
(1)
在直角坐标系下,自适应机构闭环矢量方程为
++=
(2)
把以上矢量方程按直角坐标系的和坐标轴进行分解,得:
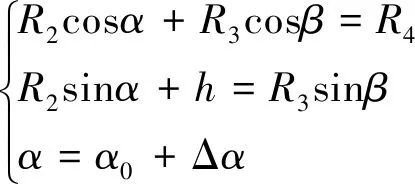
(3)
式中:为摩擦力,N;为摩擦因数;为正压力,N;为支撑杆的起始角度;为自适应机构适应管径变化过程中支撑角的变化量;、、分别为各杆的长度,mm。
运动机构适应管径变化是一个非常缓慢的运动过程,自适应机构的力平衡方程为
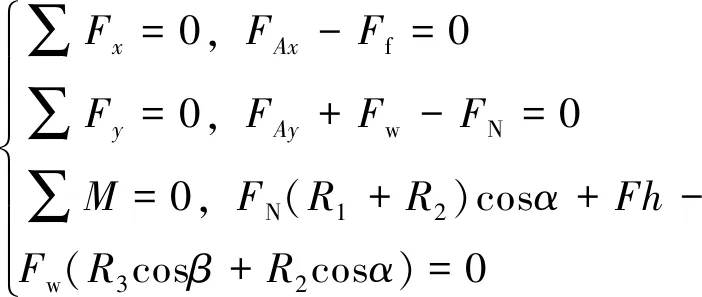
(4)
综合式(1)—式(4),可以得到自适应机构在正常工作时,支撑杆系外撑时,对管壁的正压力为
=·(tancos+sin)
(5)
通过分析式(5),可为支撑机构弹簧的优化选型提供理论依据。
(2)鼓包检测系统结构设计
鼓包检测系统结构主要由照明模块、广角镜头、CMOS图像传感器、图像处理芯片以及计算机终端组成,如图6所示。衬里复合管修形机器人在管道内行走时,实时采集机器人前方及衬管内壁的图像,经图像处理芯片转换为数字信号后传输给计算机终端,计算机通过图像对比分析对鼓包部位进行精准修复。图7所示为鼓包检测装置模型。

图6 检测系统结构框图

图7 检测装置模型
(3)导向机构整体设计
根据管道机器人在复合管道内行走和工作要求,前导向机构主要包括6组弹簧自适应支撑机构和前置鼓包检测装置。如图8所示的导向机构三维模型,中间轴将前后支座连接,通过同一圆面上均匀分布的6根立柱将弹簧安装在靠近右端支座处;通过立柱和前支座将连杆靠转动副连接,实现被动自适应管径变化;同时,6组支撑机构均匀支撑在管壁,以保证整个机器装置以正确稳定的姿态撑附在管道内,无论机器人行走还是停靠都可以使它与管壁保持相对稳定,进而为后续修形工作单元的鼓包修复提供必要的稳定条件。
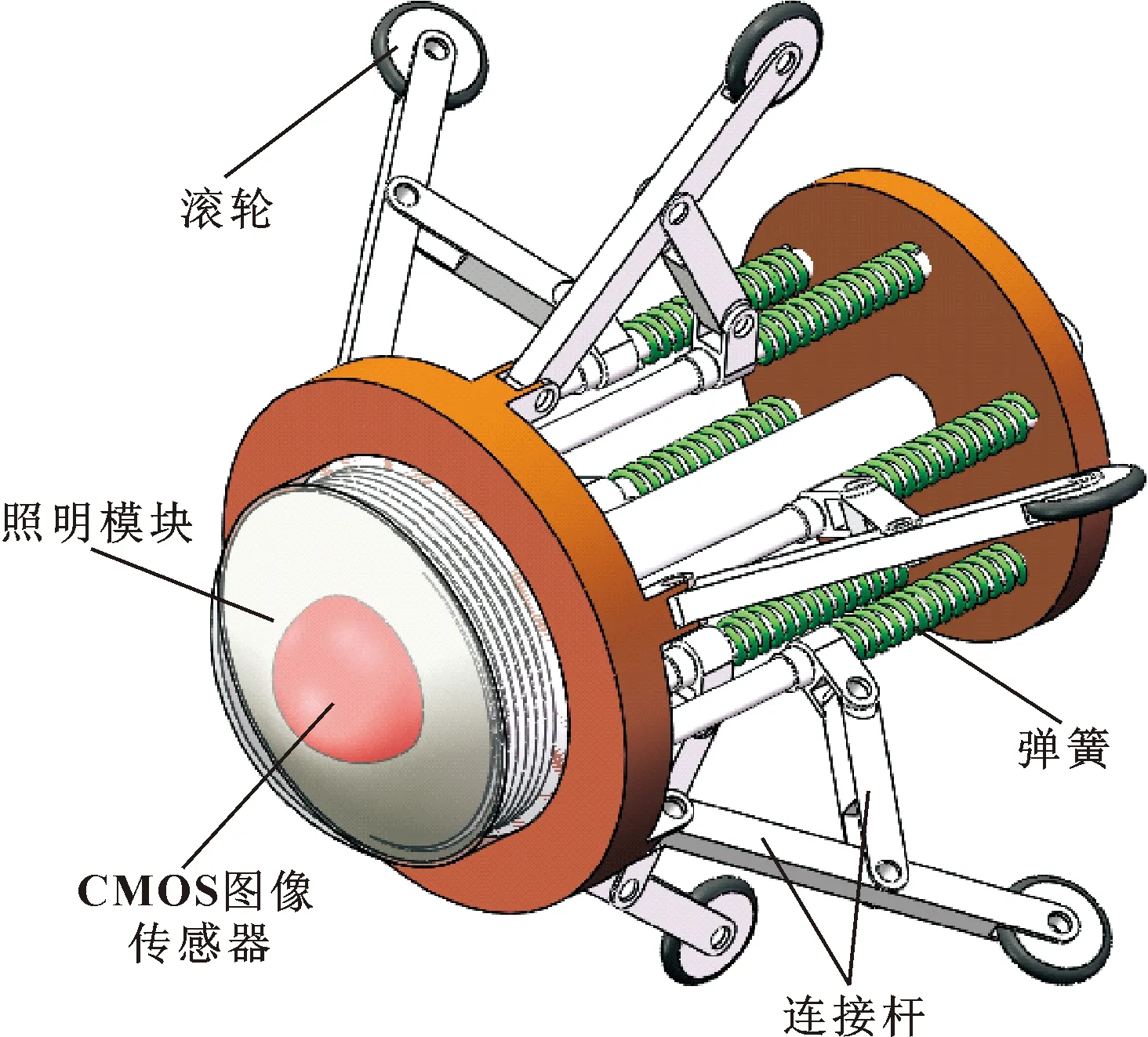
图8 前导向机构三维模型
2.2 修形机构模块
(1)结构分析
为保证修形滚子部分的平行以及受力均匀最佳,设计平行四边形结构,无论在伸缩还是在旋转过程,修形滚子能保持正确的姿态接触鼓包位置。同时,为减少修形滚子在修形过程中对衬管内壁的磨损,在滚子内部设计了一组轴承,使修形滚子能绕滚子轴转动;为使前轴和后轴相对转动而不直接从后轴输入动力带动修形机构旋转,在轴中间利用轴承组合设置相对转动;此外,在丝杠段通过双螺母结构可以改变后座轴向移动的2个极限位置A和B,使修形半径在一个可控范围内。
如图9所示,根据平行四边形与角度关系,可推导出修形半径的变化范围以及水平方向修形机构后座移动的极限位置A和B的关系。在取值上,为防止受力杆锁死情况的发生,在30°~75°之间取值。因此,针对不同管径设置A和B的位置来改变的范围,再由值确定其极限位置。
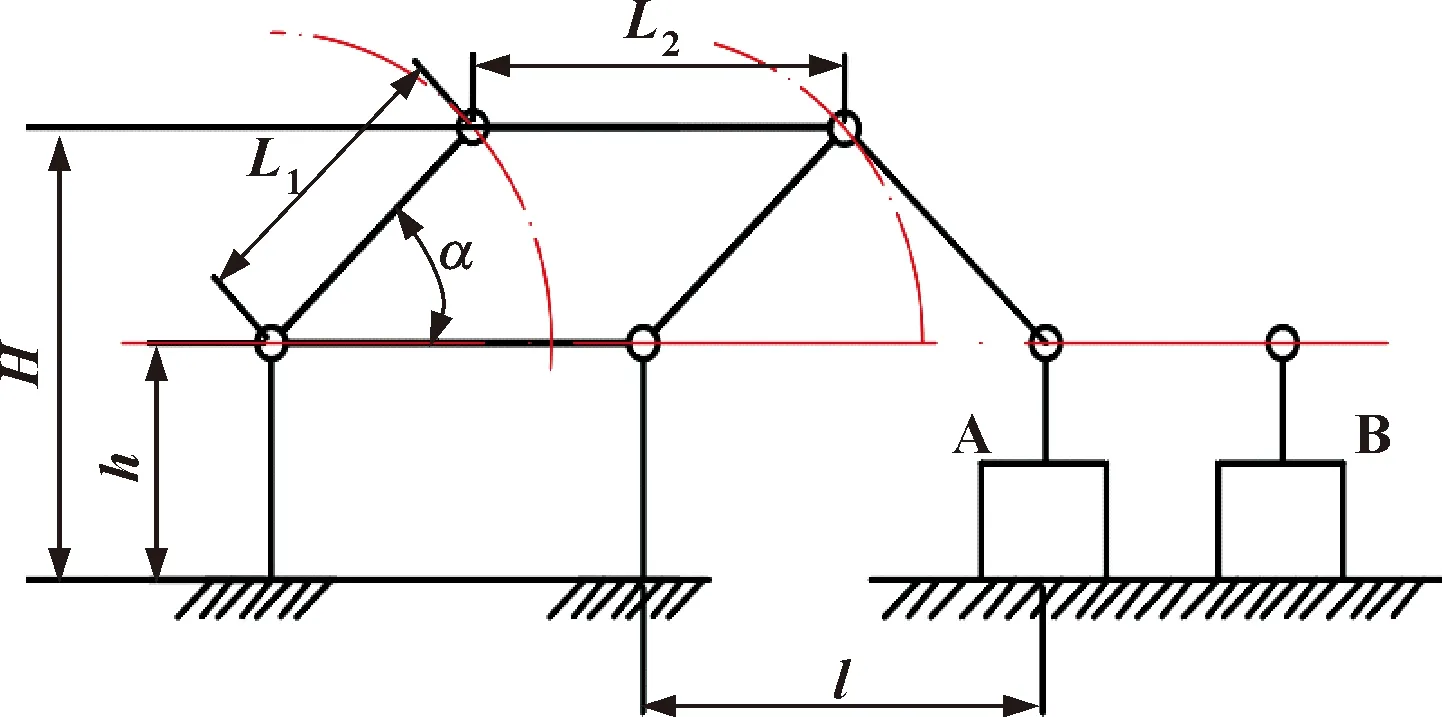
图9 修形机构简图
=cos+
(6)
=2cos
(7)
因此,由式(6)与式(7)可得:

(8)
其中:为修形高度,mm;为受力连杆长度,mm;为修形机构前后座高度,mm;为轴向左极限位置距离。
(2)三维建模与装配
为解决不同工况及管径下双金属衬里复合管衬管修形机器人对衬管鼓包等问题的修复,该机器人修形机构特别设计为由可变形支架及修形滚子组成,可变形支架与修形机构前后座相连接。图10所示为修形机构三维模型。修形机构主要由修形机构前轴、修形机构后丝杠轴、前支座和后支座、连接销柱、连接杆、受力杆、滚子修形滚子、滚子轴、滚子轴组轴承、滚子轴连接件、连接轴承、限位组件、限位圆螺母、轴段卡件和前置轴承组成,通过万向节联轴器与前置导向机构相连接。图11所示为修形机构局部剖视图。

图10 修形机构三维模型

图11 修形机构局部剖视图
2.3 控制系统模块
为保证双金属衬里复合管衬管修形机器人在衬管内移动及鼓包修复时有足够的动力,将机器人动力装置设置为主电机与步进电机两部分,主电机主要为衬管修形机器人修形机构提供足够的的修形动力;步进电机为后三角履带式支撑机构提供动力。电源分别为前导向机构系统、中央控制系统以及后行走系统提供能源;计算机终端通过无线控制单元实现对修形机器人运动状态控制;通过整个控制系统将复合管道内图像鼓包位置信息实时记录并传输;与此同时,中央控制单元读取编码器和各传感器测得的数值,经初步处理后传送至计算机端,进行数据后处理。图12所示为修形机器人控制系统框图。

图12 机器人控制系统框图
2.4 行走机构模块
双金属衬里复合管修形机器人行走机构主要起到带动机器人移动、控制机器人运行速度及支撑机器人修形的作用。目前,管道修形机器人的行走机构常见的有管道式、轮式、履带式、脚式、支撑式、行走式、蠕动式、螺旋式及蛇形式等行走方式。分析各种行走方式的优缺点,可知履带式与管壁接触面广、摩擦面大、机器人自身的牵引力相对较大、越障能力相对较高。因此,综合考虑修形机器对管道修复的效率、爬管能力和稳定性,采用三角履带式行走方式,并依靠前端导向机构弹性自适应支撑,将整个机器人稳定地支撑在管壁,通过后端履带式行走机构调节机器人行走速度。此外,该履带式行走机构采用可伸缩的丝杠结构,可由一部步进电机结合齿轮组合,同时控制伸缩张开变换,达到同步控制的效果;也可以通过三部步进电机分别控制相对的履带部位,对每个履带的伸缩分别精准控制,以增强机器人越障和过弯能力。图13所示为修形机器人履带式行走机构模型。

图13 履带式行走机构模型
将上述四大模块按总体设计框图用联轴器连接,以满足修形机器人的完整性。前端采用万向节联轴器,可以提供机器人在管道内的通过性;后面绕性联轴器的连接可吸收一部分冲击载荷,使机器人在修复鼓包工作时更加平稳。机器人整体模型如图14所示。
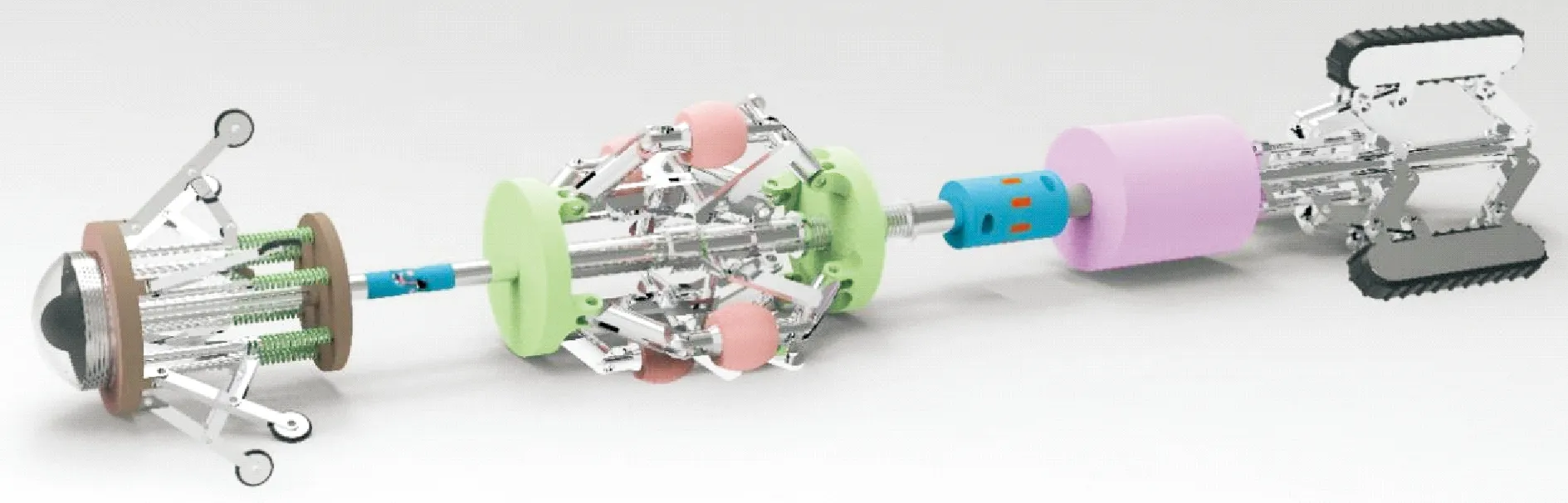
图14 机器人整体模型
3 结论
本文作者针对复合管衬管鼓包修复,使用三维建模软件设计了一种衬里复合管修形机器人。采用模块化的设计理念,将机器人各个功能模块独立设计优化,最后进行连接组装,避免了各个功能模块的运行干扰,同步协调以完成鼓包修复功能。该机器人可以顺利通过有一定障碍的管道,万向节的设计使它在弯管处的通过性能更佳;各个部件模块化的设计使得未来在该机器人基础上的设计优化存在无限可能,可独立设计其他功能模块,并组合使用以完成更复杂的管道作业。研究结果为未来集管道检测、修复以及清理同步进行的多功能管道机器人提供了参考。
