基于曲率频数统计的支护锚杆点云自适应提取方法研究
2022-09-17马明刚郑德华潘月梁李思远
马明刚,郑德华,潘月梁,李思远,张 兵,胡 创
(1.浙江宁海抽水蓄能有限公司,浙江 宁海 315600) (2.河海大学地球科学与工程学院,江苏 南京 210098)
三维激光扫描技术在水工构筑物的三维建模和变形监测等应用中愈发广泛[1-2],其中,由于主体附属结构点云如洞室支护锚杆点云与其周围环境凹凸结构点云难以区分,造成建模质量和变形提取准确性的降低. 目前,国内外学者研究提取或剔除锚杆点云的分类方法主要集中在4个方面:(1)采用边缘检测、圆柱检测等形态检测算法提取大型锚杆目标;(2)采用遥感与图像处理方法提取点云特征图像;(3)应用体素结构提取地物点云;(4)采用智能学习方法建立点云的多维特征描述符提取锚杆点云特征. 如,刘元元[3]利用支持向量机(support vector machines,SVM)使用费舍尔编码对快速点特征直方图(fast point feature histograms,FPFH)进行编码得到费舍尔向量,将其与地物的几何、辐射等全局特征结合实现杆状物的识别分类,其中,路灯、路牌杆状物点云的漏提率分别为10.7%、33.3%. 杨必胜等[4]通过分析扫描区域的点云特征图像,结合图像处理中的阈值识别、轮廓提取方法实现点云的快速分类. 王鹏等[5]利用扫描线数据中的横剖面及空间形态特征为约束条件进行地物分类,实现了对杆状物点云的自动准确提取,锚杆目标识别率为96.6%,漏提率为3.4%. 黄礼辉等[6]提出“杆状度”的概念表达杆状物在地物整体中所占的比例,将点云数据投影为特征图像,利用杆状物在特征图像上和其邻域特征点的差异提取锚杆点云,识别率为93.6%,漏提率为6.4%. 另有一些学者研究了大型杆状目标如海底管道[7-8]、输电塔筒形结构[9]的精确提取与缺陷检测;中型杆状目标如在数字化城市建设中,道路环境中的路灯、电杆、标识牌等锚杆的自动识别提取[10-11]. 上述研究主要针对车载、机载激光扫描系统以及多波束原理获取的大尺度点云开展的不同尺寸杆状目标提取. 对于支护锚杆等小型密集杆状目标点云识别,Singh等[12]使用人工神经网络对光滑顶板表面的支护锚杆点云进行识别,采用多尺度方差比例(proportion of variance,POV)、多尺度径向表面描述符(radial surface descriptor,RSD)和FPFH局部点描述符实现了锚杆点云的精确提取,召回率为 89.52%;该方法适用于从平面顶板的规则几何特征点云中提取锚杆点云,无法对洞室表面凹凸不平、锚杆长短不一且伸出方向不一致等特征的洞室密集点云进行支护锚杆点云的有效提取.
目前主要算法在提取管道等大型锚杆目标,路灯、电杆等中型锚杆目标以及平面顶板中的支护锚杆等小型锚杆目标具有较高的提取率,较好的识别结果仍存在5%左右的漏提率. 此外,支护锚杆点云常存在的混合像元现象呈现了不同视角获取的支护锚杆点云含有扫描方向的虚假拖影点云,在施工洞室变形监测和精确建模中将会引起错误的变形提取结果和降低建模精度. 因而,针对施工洞室表面喷混交错凹凸条件下小型锚杆目标的点云提取问题,采用模糊聚类和曲率频数统计方法,研究从复杂表面点云中有效提取多特征锚杆点云的自适应处理方法.
1 锚杆点云提取方法
1.1 基本思路
通常支护锚杆连接的表面凹凸不平、不同支护锚杆周围起伏存在差异,锚杆分布相对稀疏均匀且无相互遮挡. 扫描获取的支护锚杆密集点云受本身外露长度和扫描视线方向的影响产生不同危害程度的虚假拖影点云. 为了减小锚杆周围的凹凸表面对锚杆点云提取准确度的影响,设计锚杆点云初步识别和精确提取2个步骤以精确提取洞室表面支护锚杆点云. 首先,根据降采样后锚杆点云远大于周围表面凹凸起伏的特征,采用点云局部邻域检测方法提取疑似锚杆点;采用距离聚类法将疑似锚杆点云聚类为独立点云簇;针对各簇疑似锚杆点云,计算各点曲率并采用阈值法确定存在锚杆结构的点云簇;最后采用自适应曲率阈值法精确提取各簇锚杆点云. 根据以上过程,形成锚杆点云自适应提取流程,如图1所示.

图1 锚杆点云自适应提取流程Fig.1 Anchor point cloud adaptive extraction process
1.2 锚杆点云初识别方法
1.2.1 疑似锚杆点云提取
为提高初识别效率,需在保留锚杆特征的基础上对原始点云降采样,其中,根据锚杆尺寸确定降采样距离参数. 设点p(x,y,z)为降采样后点云中某一点,确定邻域半径R,获取以p点为中心邻域内的点云Q(xi,yi,zi).邻域半径R值选取过小将导致邻域范围内不能准确识别所有锚杆点云;半径R值选取过大将导致锚杆点云与周围表面的区分程度和处理效率降低.因此,邻域半径R值的选取与锚杆长度相关,一般取略大于最长锚杆长度的1/2.将邻域局部点云Q进行霍特林变换,得到局部坐标系的邻域点云Q′,计算局部坐标系下各点Z轴坐标值的标准差Zstd,并根据Zstd大小判断该邻域局部点云中是否存在疑似锚杆点云.具体实现过程如下:
(1)按式(1)计算点云中心坐标m:
(1)
(2)根据邻域局部点云Q和中心坐标m,按式(2)计算协方差矩阵C:
(2)
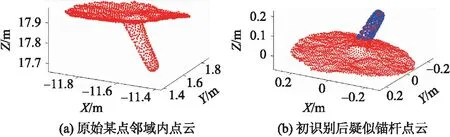
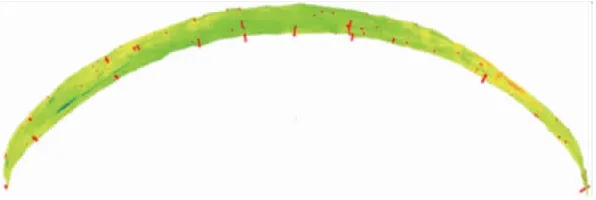
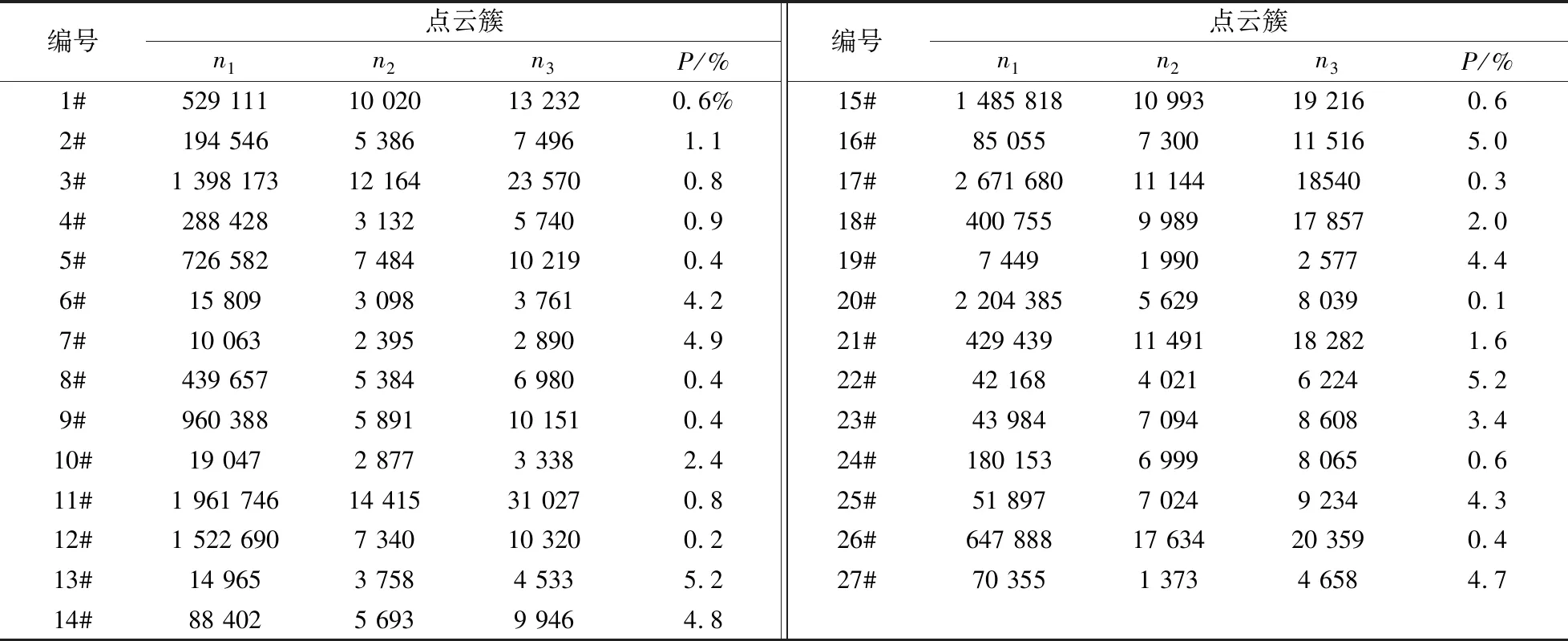
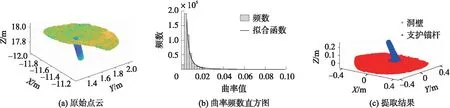
(3)根据正定矩阵C的3个特征值d1,d2和d3(d1 (3) (4)按式(4)计算变换后点云Q的标准差Zstd: (4) (5)设置阈值L,当邻域内某点到XOY平面的距离Dxoy>L·Zstd时,则判断该点为疑似锚杆点云. 由于常规环境下,锚杆周围表面并非规则平面型几何特征,常含较多无规律交错分布、大小不等的微小凸起,且凹凸起伏程度远小于锚杆的凸起形态,因此,若距离阈值L较小则将微小凸起点云误识别为锚杆点云;阈值L较大则导致漏提短小锚杆点云.为提高疑似锚杆点云提取的准确性,L的取值需满足可提取处理区域内最短锚杆的1/2长度,以初识别出邻域点云中疑似锚杆的顶端部位点云. 1.2.2 疑似锚杆点云聚类与筛选 初识别出的疑似锚杆顶端部位点云在空间上呈现块状分布特征,采用距离聚类法得到疑似锚杆点云簇.其中,聚类距离参数D根据初识别降采样参数确定,为降采样点云最大间距.针对聚类所得n簇疑似锚杆点云簇,以每簇点云重心为球心,主方向长度为半径构建n个包围球,在原始密集点云中搜寻各包围球内点云得到n簇原始疑似锚杆点云集Yi(i=1,2,…,n),点云Yi经霍特林变换至局部坐标系得点云集Y′i,变换后锚杆周围点云均位于XOY平面附近,锚杆顶端点云主方向与Z轴平行.计算Y′i各点至XOY平面的距离di,根据锚杆最小长度值及di的最值,判定原始疑似锚杆点云集Yi内是否含有锚杆点云. 1.3.1 锚杆点云曲率计算 针对数据采集过程中因混合像元效应产生的锚杆部位拖影现象造成局部平面曲率偏低的问题,计算曲率之前,根据局部坐标系中点云Zi值预先提取锚杆顶部点云.其中,阈值Zlim按下式计算: (5) 满足|Zi|>Zlim的点即为锚杆顶部点云,经筛选计算剩余点曲率时,取其中一点q(x,y,z),由式(1)、式(2)计算以q点为中心,半径为r的局部邻域点云的特征值矩阵Cq,根据其特征值λ1、λ2、λ3可求得点q的曲率Qq: (6) 为避免因邻域半径值r过小造成锚杆点云曲率值偏低致提取不准确的问题,邻域半径值r应大于锚杆直径. 1.3.2 曲率统计与幂曲线拟合 获取各点云簇的点云曲率后,对曲率值进行分布统计,计算曲率频数直方图拟合曲线的曲率最大值点,将其对应的点云曲率值作为该点云簇曲率阈值T以区分锚杆点云与周围环境表面点云.其中,直方图拟合以直方图频数最大值为分界线,对曲率频数采用如下幂函数曲线进行模型拟合: y=axb, (7) 式中,x为曲率值,y为曲率频数,a、b为拟合参数.针对各点云簇得到自适应阈值后,判断原始点云中曲率值大于阈值T的点为锚杆点.以周围环境表面点云误提取率P对提取锚杆点云准确率进行评价,见下式: (8) 式中,n1为各原点云簇的点数,n2为人工判别提取锚杆点数,n3为本文方法提取锚杆点数.最终所得误提取率P越小,则锚杆点云提取准确率越高. 图2 实验数据采集Fig.2 Experimental data acquisition 锚杆支护方法是地下工程中重要的支护方法,应用于各类地下工程中以提高施工期的稳定性,保持一定的承载能力. 在抽水蓄能电站地下厂房开挖阶段,由于地质条件、爆破等因素造成变形,需定期监测以保证施工的安全性. 本文实验对象为浙江省某抽水蓄能电站地下主厂房施工洞室,见图2(a). 实验数据采集采用德国Z+F IMAGER 5016三维激光扫描仪扫描洞室,扫描设置分辨率为0.6 mm,采集的洞室表面密集点云数据,见图2(b). 由于施工期洞室拱顶具有支护锚杆分布密集、裸露长度不一,喷混表面存在大量凸起的特点,导致不同测站获取的锚杆点云不完全相同且锚杆根部存在因混合像元效应产生的虚假点云,严重影响洞室点云配准的精度和变形量提取的准确性. 因此,采用本文提出的基于曲率频数统计的锚杆点云自适应提取方法自动剔除锚杆点云. 试验区域为5 m长度的拱顶节段精配准后的洞室点云,拱顶支护锚杆直径约为4 cm. 首先,对该区域点云进行均匀降采样处理,得到点间距1 cm的降采样点云,见图3. 其中,某一存在支护锚杆结构的局部点云,见图4(a),该区域降采样后点云仍保持锚杆原始结构特征,见图4(b). 图4 支护锚杆点云降采样Fig.4 Down-sampling of supporting anchor point cloud 图3 试验区域降采样后点云Fig.3 Point cloud in test area after down-sampling 其次,通过设置阈值L,对降采样点云采用本文提出的支护锚杆初识别方法提取疑似支护锚杆点云. 根据试验区支护锚杆统计长度,L取5 cm时,准确识别出所有支护锚杆点云部位,识别出的锚杆点云中存在少量洞室微小凸起的误识别点云. 其中,洞室支护锚杆的原始某点邻域内点云,见图5(a),初识别后得到的疑似支护锚杆点云,见图5(b). 5 m节段拱顶整体点云经初识别得到所有疑似支护锚杆点云,见图6中凸起部分点云. 图5 疑似锚杆初识别结果Fig.5 Initial identification result of suspected supporting anchor 图6 初识别的疑似锚杆点云Fig.6 Suspected supporting anchor point cloud of initial identification 对提取的疑似支护锚杆点云进行距离聚类,共获得疑似支护锚杆点云442簇,包含锚杆结构点云与误识别的洞室微小凸起点云. 以各簇点云重心为中点,在原始点云中提取其邻域范围内点云并转换至局部坐标系进行判定. 通过疑似锚杆点云在原始数据中提取的疑似锚杆原始点云,见图7(a),局部坐标系中该疑似锚杆原始点云各点到XOY平面距离的统计直方图,见图7(b),试验区域内的锚杆结构点云簇,见图8. 图8 存在锚杆结构的点云簇Fig.8 Point cloud clusters with supporting anchor structure 经锚杆结构部位判定,该试验节段区域共获取27组锚杆结构点云簇. 为验证自动识别的结果,采用人工判别方式统计该试验区域内的真实支护锚杆结构数量为28组,其中2组支护锚杆结构点云因距离较近位于同一点云簇中. 由此可见,本文方法与人工识别的支护锚杆点云簇数量相同,试验节段区域内所有的锚杆结构点云簇均能被提取,该方法的锚杆结构点云初识别准确率为100%. 对初识别中确定存在支护锚杆结构的27组锚杆结构点云簇,以式(5)中Zlim为阈值提取锚杆顶部点云;根据实际锚杆直径取邻域半径值r为5 cm,按式(6)计算各簇点云曲率,不同类型的支护锚杆结构所在的点云簇曲率分布,如图9所示. 图9 锚杆所在点云簇曲率分布Fig.9 Curvature distributions of cloud cluster with anchor rods 由图9可知,不同点云簇中顶拱部分与支护锚杆部分的曲率存在差异,可根据统计各点云簇曲率频数直方图加以区分. 按式(7)对曲率频数数据进行幂函数曲线拟合得各点云簇阈值,精提取得到27组点云簇进行锚杆点云. 统计各点云簇原始点云数n1、人工提取点数n2、本文方法提取点数n3及拱顶点云误识别率P,见表1. 由表1可得,针对不同的支护锚杆类型,本文方法提取的支护锚杆点数量均略多于人工提取的支护锚杆点数量,拱顶点云误识别率范围为0.1%~5.2%,被误识别的点主要位于支护锚杆与顶拱交接部位,该部位曲率变化存在差异造成锚杆点云过识别现象;27组点云簇所精提取的锚杆点云均无漏识别现象. 表1 各点云簇锚杆提取结果Table 1 Extraction results of anchor rods in each cloud cluster 根据该试验区域所提取的27组锚杆点云的特征,可划分为4类典型锚杆结构点云. 其中,类型Ⅰ存在少量混合像元型锚杆点云,共计14组,其特征如21号锚杆点云,见图10;类型Ⅱ存在反向拖影型锚杆点云,共计9组,其特征如17号锚杆点云,见图11;类型Ⅲ为正常状态型锚杆点云,共计3组,其特征如8号锚杆点云,见图12;类型Ⅳ为多锚杆聚集型锚杆点云,共计1组,其特征如26号锚杆点云,见图13. 图10 少量拖影点支护锚杆提取结果Fig.10 Supporting anchor extraction results of small amount of shadow point 图11 长支护锚杆提取结果Fig.11 Extraction results of long supporting anchor 图12 正常扫描状态下支护锚杆提取结果Fig.12 Supporting anchor extraction results of normal scanning state 图13 双支护锚杆提取结果Fig.13 Extraction results of double support anchor 由图10-图13可知,类型Ⅰ为长约20 cm的支护锚杆,其中包含少量因混合像元效应产生的拖影点;类型Ⅱ为一根长支护锚杆,其顶部包含较多拖影点,底部存在因扫描误差造成的反向拖影现象;类型Ⅲ为正常扫描状态下的支护锚杆,含极少量拖影点;类型Ⅳ为上文所述2根支护锚杆位于同一点云簇内的情形. 从上述结果可以看出,当支护锚杆不垂直于顶拱表面时,存在过识别现象,其主要位于支护锚杆与顶拱表面夹角小于90°的方位,支护锚杆与顶拱表面夹角大于90°的部位几乎不存在过识别现象. 由此可见,本文方法能够准确地从存在大量微小凸起的拱顶喷混表面中提取出不同特征类型、分布密集的支护锚杆点云,采用本文方法提取的支护锚杆点数量多于人工提取的支护锚杆点数量,但不存在漏识别问题,能够满足后续数据应用处理的要求. 本文针对地下施工洞室拱顶的支护锚杆点云及其根部拖影点云影响点云精配准精度和变形量提取的问题,根据锚杆点云和拱顶表面点云之间的曲率差异,提出一种基于曲率频数统计的锚杆点云自适应提取方法,经实验验证,得到以下结论: (1)设计的洞室支护锚杆点云初识别和精提取环节,能够准确地从不规则喷混拱顶密集点云中提取支护锚杆结构点云及其根部拖影点云. (2)构建局部坐标系下Z坐标的分布特征初步筛选疑似支护锚杆点,并采用距离聚类法得到所有支护锚杆点云簇. 提出依据实际支护锚杆长度筛选部分支护锚杆顶端点云的方法,经实验验证,初识别与聚类后的锚杆结构数量准确率为100%. 在保留支护锚杆边缘特征的前提下,通过预先对原始密集点云降采样,能够有效提高支护锚杆点云的提取效率. (3)提出的基于曲率频数统计的自适应提取方法具有良好的适用性与稳定性,拱顶点云误识别率范围为0.1%~5.2%,无锚杆点云漏识别现象,能够精确区分拱顶部位点云与不同类型的支护锚杆结构点云,可为水电施工洞室、高铁隧道、高边坡等锚杆支护工程采用三维激光扫描点云进行精确配准、变形监测和精确建模等数据处理提供无锚杆点云影响的优质数据.1.3 锚杆点云精提取方法

2 洞室锚杆点云初识别



3 洞室锚杆点云精提取




4 结论