基于超声法清洗的管道蛇形机器人研究
2022-09-15王斌郭岩宝于海文杨玉成王德国
王斌,郭岩宝,于海文,杨玉成,王德国
(1.中国石油大学(北京)机械与储运工程学院,北京 102249;2.中国石油天然气集团有限公司,北京 100007)
0 前言
管道作为一种运输工具在石油、天然气等行业发挥着重要作用,然而在工况环境经过较长时间后,管道内壁会出现石蜡、淤泥、碳酸盐、油垢等物质的结块甚至堵塞,严重影响石油和天然气的运输,甚至可能造成严重事故。管道的检测和清洗工作可以有效及时地避免事故的发生,然而传统靠人工机械方式检测和清洗浪费大量的人力物力,既不经济,安全性也差。因此,管道清洁机器人进入油气领域,用于完成清洁工作。
国内外科研工作者经过长时间努力,设计了不同的管道清洁机器人。潘剑锋等研究了一种基于丝杠螺母的足式管道清洁机器人,可以在变径管道内行走。TANISE等改进了蠕动爬行机器人清扫管道行走性能。 ITO等开发了一种应用于实际环境的蠕动式管道清洁机器人,有效提高了清洁效率。谭益松等研究了一种仿尺蠖式气压驱动管道清洁机器人,该机器人结构简单,可实现远距离复杂管道的清洁工作。目前,市场上出现了一些利用超声波方法来清洗管道的清洗机。然而,该类清洗机体型庞大、移动困难、清洁效率低,现有的机器人利用机械式清洗方法清洁效果不好,不能彻底将污垢清除,且移动范围有限,不能适用于各种复杂管道。
考虑到油气管道环境的需求,设计以STM32单片机为控制核心、多个模块融合的基于超声波法的管道清洁蛇形机器人。本文作者从机械结构和控制系统两方面分析该机器人特点,通过数理计算分析该机器人在变径管道中的直行、转弯运动效果以及螺旋桨提供的动力;通过MATLAB仿真分析蛇形机器人蜿蜒前行的影响因素,并通过正交试验法检验该机器人清洁污垢的效果。
1 机械结构设计
本文作者设计的基于超声波法的管道蛇形清洁机器人主要由四部分结构组成:前驱动肢体、肢体运动关节、后驱动肢体和旋转扫尾结构。图1所示为该机器人的整体结构。

图1 机器人整体结构
1.1 肢体运动关节设计
机器人肢体的转弯及摆动主要靠肢体运动关节实现。如图2所示,该关节由两个分别连接前后驱动肢体的转动固件连接组成,在与后驱动肢体相连的转动固件上安装有大扭矩舵机,舵机的转臂与另外的转动固件以焊接形式连接,可控制前驱动肢体实现180°转动。后驱动肢体与丝杠连接,可实现圆周翻转。机器人的转弯运动可先控制丝杠转动使机器人前驱动肢体旋转90°,然后控制舵机摆动90°,在一个电机和一个舵机配合控制下实现在T形管道内的转弯运动。

图2 肢体运动关节示意
1.2 管径自适应驱动装置设计
管径自适应驱动装置通过带动与伺服电机固定连接的丝杠转动,带动与丝杠配合的超声波清洗腔体的滑套向左右滑动,促使自适应连杆平移,实现可在不同管径内移动的目的。如图3(a)所示,自适应装置上的4个轮子具有防滑特性,轮子轴心位置装有扭簧,机器人可以在管道内前进移动。
确定自适应装置适应的管道范围需考虑2种必要条件,即==和=≠。在==的情况下,当自适应装置处于使4个轮都支撑在管道内壁位置时,运动机构可简化成图3(a)。将机器人在最大管径时的位置作为初始位置,其中=0,根据设计要求,===,丝杠螺距为、长为,电机旋转圈数为,得:
=
(1)
点到的距离为

(2)
根据图3,得:

(3)
从而得到可支撑的半径与的关系:

(4)
可达最大半径:

(5)

(6)
故管径的范围为

(7)
在=≠情况下,自适应装置可能会最大程度适应管径。如图3(b)所示,当垂直于时,可适应的最大半径为
=+
(8)
为检验范围,假设处在如图3(b)的直角位置,存在的三角函数定式为

(9)
则可得:

(10)
长度随的变化而变化,即随着丝杠转动的圈数变化。当=0时,的值最大,可适应最大半径,即当垂直于时,电机的丝杠在初始位置(=0)。当与平行时,管径可适应的值最小,即:
=
(11)
机器人的前进推力靠后驱动肢体的涡轮螺旋桨提供,如图3(c)所示。假设管道内液体的流速很小可忽略不计,通过公式计算可求得螺旋桨转动对机器人产生的有效推力和所需功率,从而判断其设计是否合理。螺旋桨的直径为,推力系数为,转矩系数为,电机的转速为,相对旋转效率为,则淌水额定转矩为
=()/(2π)
(12)
螺旋桨的转速为

(13)
螺旋桨产生的总推力为
=
(14)
螺旋桨在管道内产生有效推力为
=(1-)=(1-)
(15)
机器人螺旋桨收到的功率即电机可产生的功率为

(16)
根据螺旋桨的螺旋部分剖视图分析其刚体变换。如图3(c)所示,点为末端旋转轴上的一点,点为旋转轴上的某一点,螺旋桨在以单位角速度旋转运动时,点的线速度为

图3 后驱动肢体各结构示意

(17)

(18)
将式(17)转化为

(19)
求解得:

(20)

1.3 清洁装置设计
文中所设计的机器人清洁装置由两部分组成:超声波清洗模块和清除污垢模块。如图4所示,超声波清洗模块由超声波换能器和超声波发生器搭配集成电路组成,超声波换能器与机器人的超声波清洗模块腔体内壁紧贴。该机器人为有缆式机器人,PC上位机和超声波发生器在管道外,通过电缆与机器人连接。

图4 清洁装置流程示意
在超声波换能器的作用下将声能转换成机械振动,从而将超声波能量辐射到管道内的液体中。当液体受到超声波振荡后会产生许多空化气泡,气泡的形成到破裂会积攒能量,当气泡破裂时,能量会大量释放从而产生极大的冲击波,振碎附着在管道内壁结固的污垢;随着机器人的前进,旋转扫尾结构在电机带动下旋转运动,该结构的头部由吸油海绵构成,可吸附被振碎的污垢,这种双层清洁的方式可以彻底清洁污垢。
1.4 波形推进函数
本文作者研究该机器人的运动轨迹,设计其运动曲线。该机器人的关节采用单自由度,根据机器人移动时的曲线,基于Serpenoid原理,确定其波形推进函数。
Serpenoid曲线的曲率方程为

(21)
式中:为机器人在移动过程中走出的S形状的数目;为机器人的身长;为机器人在曲线方向上的位移;为机器人转过的弯角。在文中,为机器人开始移动时的弯角。
为方便研究和计算,可将式(21)简化为
()=-sin()+
(22)

将曲率公式积分可得偏转角公式,即对式(22)积分,可得清洁机器人前进时头部相对于直行方向的偏转角方程。

(23)
由式(23)可知,固定参数和的值,参数变化,相对应的Serpenoid曲线也随之改变。由此可得,、不变时,值越大,清洁机器人前进过程中摆动的幅值越大,并且单个S波形越长。
2 控制系统设计
2.1 控制系统结构
为满足机器人对于油气管道内作业的控制需求,设计其控制系统的总体结构。如图5所示,监控系统通过有线电缆将指令发送给主控系统,主控系统检测到管道内环境的数据信号和传感器反馈信号后再反馈给监控系统,定位系统采用GPS模块进行定位,当主控系统接收到监控系统发出的指令后,可以控制从动系统完成机器人在管道内的移动、清洁等功能。

图5 机器人控制系统结构
2.2 机器人控制系统设计
所设计的机器人控制系统具备信息监测和反馈功能,程序运行流程如图6所示。机器人电源启动后,控制系统初始化设置,同时检测程序故障问题,如果程序有故障将会自动复位。程序检测程序合格后,单片机主控系统打开,控制机器人开始在管道内移动并检测管道内信息,同时将信息数据反馈给检测系统。当机器人检测到管道内壁有油污时,主控系统进行数据处理分析并作出判断,控制清洗模块启动,检测系统会循环检测污垢是否被清洗干净以判断是否结束程序。

图6 控制系统流程
3 机器人超声波清洗正交试验
文中采用正交试验法研究超声波频率、超声波功率和清洗时间对清洗效果的影响。为简单有效地检测清洗效果,试验在由亚克力材料制作的透明管道内进行。管直径10 cm、长度30 cm,而且两端封口。管道内放置有清洗液,液面深度为6 cm。机器人由超声波清洗模块、可调频率和功率的超声波发生器和超声波换能器组成,试验台如图7所示。试验变量:超声波频率分别为40、180、320、460 Hz;超声波功率分别为0.1、0.25 、0.4 、0.65 W/cm;清洗时间分别为10、20、30、40、50 min。对照组为机械式清洗方式,将石蜡、碳酸盐、泥沙和石油焦的混合物涂抹在管道内壁,厚度为3 cm。 清洗试验在室温(25 ℃)环境下进行,每组试验重复进行3次,数据取平均值。

图7 正交试验台示意
4 结果与讨论
4.1 步态控制仿真
通过MATLAB软件研究波形推进函数中、、与曲线的关系,在固定参数不变的情况下分别绘制Serpenoid曲线。图8(a)为在、固定不变的状态下,通过改变绘制的函数曲线。可得:在、固定不变的情况下,与蜿蜒曲线的幅值以及单个S波的波长度呈正相关。图8(b)为在、固定不变的情况下,通过改变绘制的函数曲线。可得:当、固定不变时,与曲线的振幅以及S波的波长呈负相关。图8(c)为固定参数、的值,根据的取值得到的Serpenoid曲线。可得:在、不变的情况下,与方向偏转量呈正相关。
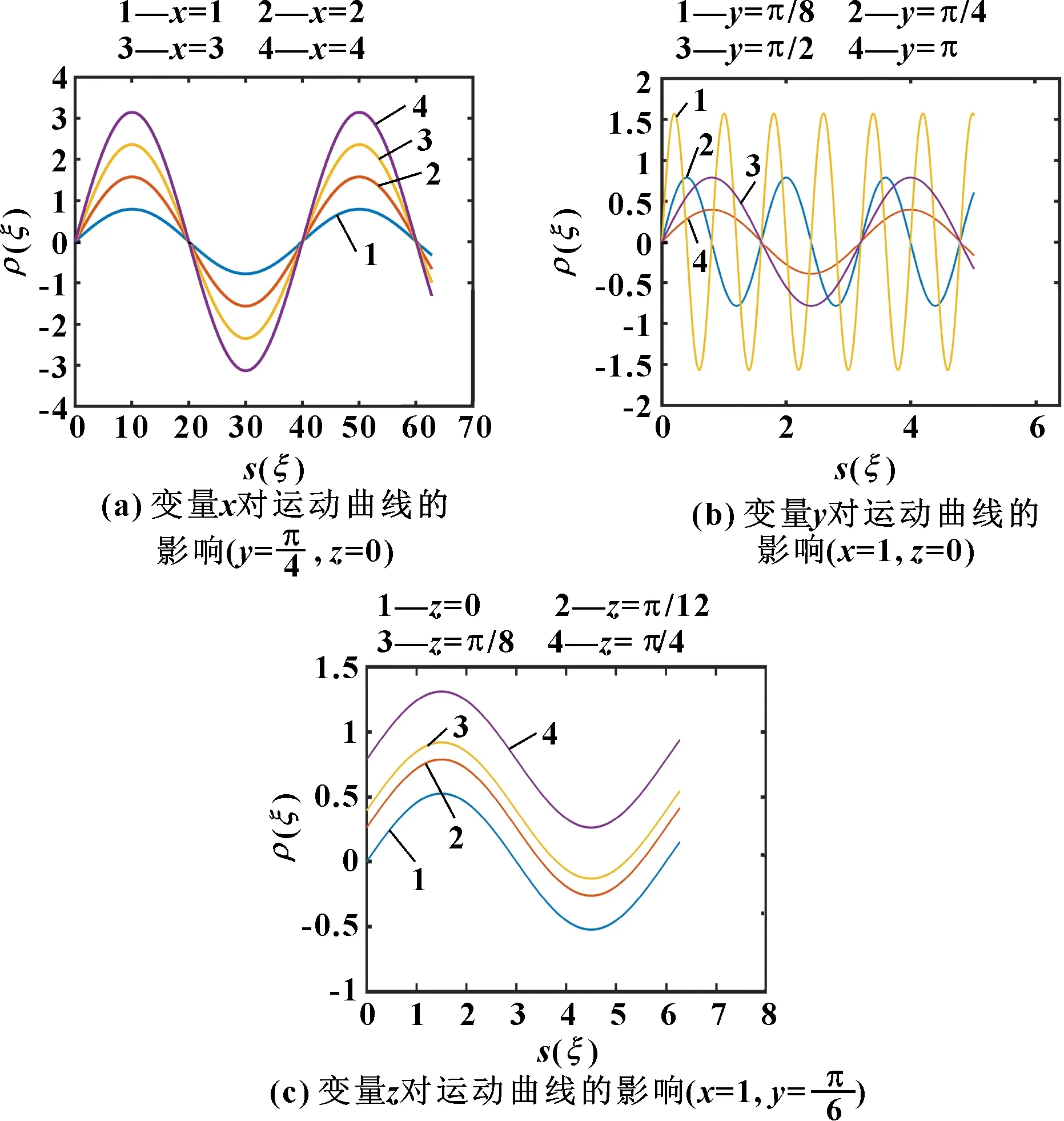
图8 Serpenoid函数曲线
4.2 清洗效果
试验结果表明:超声波清洗的时间、频率以及功率都与清洗的效果有关。根据清洗数据绘制清洗效果曲线如图9所示。可知:清洗时间与清洗效果呈正相关;超声波频率与清洗效果呈正相关;整体超声波清洗效果强于机械清洗,但在超声波功率超过0.4 W/cm后,清洗效果与功率呈反比关系。

图9 清洗效果曲线
综合上述分析结果,得出该基于超声波法的管道清洁机器人的清洁效果较好,设置清洗时间为20~30 min、超声波频率为300~500 kHz、超声波功率为0.25~0.4 W/cm时,可达到最佳清洁效果。
5 结论
本文作者对基于超声波法的管道蛇形清洁机器人进行了结构和控制系统设计,使其具备能够在变径、T形管内运动和完成超声波-机械双重清洁的功能。通过数理计算确定合适的变径管道直径范围、螺旋桨驱动力和转弯角度,验证该机器人能在变径管道内顺利完成直行以及转弯任务。通过MATLAB软件对该机器人的步态运动进行仿真,绘制了Serpenoid曲线,证明了Serpenoid曲线函数中、分别对机器人蜿蜒运动的幅值、振幅和偏转方向呈正相关;呈负相关。通过超声波清洗正交试验,证明了超声波频率、超声波功率以及清洗时间都会影响其清洗效果,该类超声波-机械清洗方式能有效清除管道内污垢,验证了该类机器人具有较好的扩展性和可行性。研究结果为管道的清洗提供了参考。
