气动软体管道机器人步态规划与实验
2022-09-15宋懋征刘晓敏赵云伟田德宝秦鹏
宋懋征,刘晓敏,赵云伟,田德宝,秦鹏
(北华大学机械工程学院,吉林吉林 132021)
0 前言
软体管道机器人具有稳定性好、结构简单和灵活性高的特点,在医疗卫生、化学化工和石油工业等领域具有广泛的应用前景。为提高管道机器人在多种工作环境下的工作效率,近年来国内外学者对各种管道机器人,如轮式、履带式、蠕动式等机器人,其行进步态进行了深入研究。VERMA等仿照蠕虫的运动机制,通过6种状态的周期性驱动实现机器人在管道内的爬行。SUN等建立了可应用于蛇形机器人运动的步态,提出了一种基于ser-penoid曲线的蠕动步态模型。上海工程技术大学张春燕等设计了一种连杆组成的蠕动式管道机器人,探究管道内蠕动机构的移动方式,并规划了蠕动步态。上述规划的机器人步态仅针对机器人单一任务进行设计,缺乏适应不同工作环境的爬行步态。为提高机器人在管道内作业的灵活性与适应性,需针对不同作业任务规划不同的步态。
本文作者基于两种气动软体驱动器设计一种气动柔性管道机器人,设计其步态进行实验验证,并在实验室环境下进行管道清障实验。
1 机器人结构与功能
文中设计的气动软体管道机器人本体主要由足部、躯干及通气管组成,其结构如图1所示。足与躯干分别由2个径向膨胀软体驱动器和1个轴向伸缩软体驱动器组成[见图1(a)];躯干与两足部之间通过凸型台嵌入式装配,且各个驱动器的通气管采用内嵌式插管方式,后经气管整合装置与外部气源连接[见图1(b)]。

图1 气动柔性管道机器人结构
充气后,足部驱动器发生径向膨胀变形支撑管壁,躯干驱动器轴向伸长,推动机器人前行。机器人在规划的步态下,可完成检测、清障和物料输送等作业。机器人材料及性能参数见表1。

表1 管道机器人材料及性能参数
2 步态规划
机器人在不同作业环境中,需要规划相应的运动步态。如在障碍清除作业(图2)中,机器人未到达工作区域时,需要快速前行;抵达障碍清除区域后,需要较强的输出力清除障碍物。为此规划2种运动步态,分别为快速移动步态与载荷作业步态。

图2 作业中的步态规划
2种步态的时序图及动作见图3和图4。图3为载荷作业步态时序图,为使机器人获得较强的障碍清除能力,各驱动器依次逐一完成充放气动作,该时序下机器人运动分为6步。初始状态下,后足驱动器充气膨胀,抵住管壁[图3(a)];时间,躯干驱动器开始充气伸长[图3(b)];时间前足驱动器充气膨胀直至贴紧管壁[图3(c)];—时间,后足驱动器先放气收缩[图3(d)],躯干驱动器放气缩回[图3(e)];最后—时间,后足驱动器充气膨胀[图3(f)],抵住管壁后,前足驱动器放气收缩,回到原始状态[图3(g)];至此机器人完成了一个周期性的前进运动,前进位移为Δ。

图3 载荷作业步态
为实现在管道内的快速移动或完成快速检测工作,根据不同驱动器充放气时长采用多个驱动器交叉充放气,缩短机器人运动周期(图4)。该步态下机器人运动共分为4步:初始状态下,前足与后足都处于膨胀状态[图4(a)],时间,前足泄气过程中,躯干于12时间开始充气伸长[图4(b)];时间,前足泄气后马上充气膨胀[图4(c)],躯干充气至1/2;时间,后足开始放气收缩,在12时间,躯干泄气回缩[图4(d)];1/2时间,后足开始充气膨胀,抵住管壁[图4(e)]。

图4 快速移动步态
对比2种步态,快速移动步态的运动步数少于载荷作业步态,且机器人运动周期短,速度较快,可适用于在管道内的快速移动或快速检测工作;而载荷作业步态中,足部与管壁充分接触,可提供较大的接触力,用于载荷作业。
3 实验与分析
运动检测平台主要由气压控制系统、三维运动捕捉系统及计算机等组成。运动学实验原理如图5所示。通过该运动学实验平台可进行机器人步态实验和载荷实验,测试机器人在不同步态下的运动性能,获得机器人运动位移和速度。具体实验参数如表2所示。

图5 运动学实验原理

表2 实验条件
3.1 步态应用
图6为在步频1.25 Hz下,机器人在2种步态下位移随时间变化曲线。由时序图(图3、图4)可知:在相同步频下,快速移动步态较载荷作业步态运动步数少,运动周期较短。与载荷作业步态比,快速移动步态的移动速度明显高于载荷作业步态,分别可达3.22、2.66 mm/s。
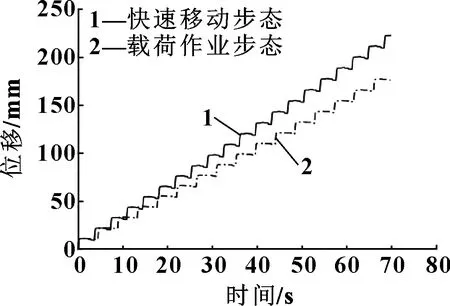
图6 不同步态下机器人前进位移随时间变化曲线
图7为2种步态下,足部与管壁接触力随时间变化曲线,其接触力由六维力传感器测得。由图7可知:快速移动步态下,由于充放气交替变换,足部与管壁未充分接触[图4(b)和图4(d)];而载荷作业步态下,其足部与管壁有充分接触时间,可提供足够的支撑力,适用于载荷作业。快速移动步态和载荷作业步态下足部驱动器与管壁的最大接触力分别为7.98、8.20 N。

图7 不同步态下足部与管壁接触力随时间变化曲线
3.2 步态适应性
(1)快速移动步态
图8为应用快速移动步态,机器人在不同工况下在管道内的位移。可知:机器人在快速移动步态下,可在水平、倾斜45°和垂直管道中稳定爬行,其速度分别为4.03、5.03、5.50 mm/s。

图8 不同工况下机器人前进位移随时间变化曲线
(2)载荷作业步态
机器人负载作业时,需要足够的负载能力。机器人在步频1.25 Hz下,驱动器工作气压如表3所示。

表3 障碍下各驱动器工作压力参数
由图9可知:载荷作业步态下,机器人在不同负载下可稳定前行,最大负载能力10 N,其速度为1.23 mm/s。

图9 不同负载下机器人前进位移随时间变化曲线
图10为在步频1.25 Hz且负载2 N下,在不同截面的管道机器人前进位移曲线。机器人在圆形管、正方形管和三角形管中爬行时,其足部气压分别为0.075、0.085、0.095 MPa。由图10可知:面对不同截面的管道,在载荷作业步态下,机器人足部可提供足够的接触力(图7),可在三角形、正方形和圆形管道中稳定前行,其速度分别为2.02、2.34、2.69 mm/s。

图10 不同截面管道下机器人负载前行
图11为管道机器人在步频1.25 Hz下,在内径尺寸为54、56和59 mm的管道中的爬行位移曲线,机器人足部气压分别设定为0.075、0.085、0.095 MPa,其速度分别为2.67、2.49、2.28 mm/s。从仿真结果可知:气压下足部变形随着管径不同适应变化,载荷作业步态下,可提供足够的接触力,可在54~59 mm的管道中稳定前行。
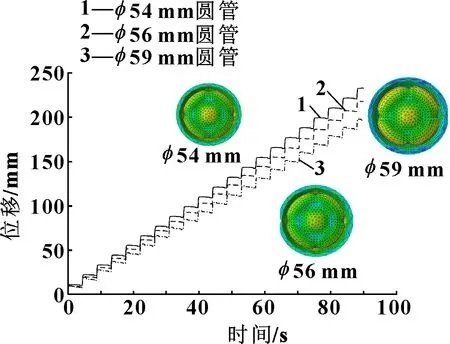
图11 不同内径管道下机器人负载前行
3.3 障碍清除作业
在实验环境下,模拟管道内障碍清除作业,其过程见图12。非作业区域内,机器人采用快速移动步态,快速穿越非工作区(=5.13 mm/s);到达作业区域后,机器人变换为载荷作业步态,提供较大的输出力,推动10 N障碍物移出至安全区域(=3.70 mm/s)。实验结果表明:2种步态的配合下,该机器人可高效稳定地完成清障作业。

图12 障碍清除作业
综上,所规划的2种步态具有较强的适应性和灵活性;快速移动步态可应用于快速移动或检测,载荷作业步态可应用于清障或输送物料等工作。快速移动步态下机器人最大速度可达5.50 mm/s,载荷作业步态下机器人可垂直推动10 N的障碍。
4 结论
采用自主研发的2种软体驱动器设计了一种气动柔性管道机器人,并根据作业任务,规划了2种运动步态,并进行了实验验证。结果表明:机器人2种步态具有一定灵活性与适应性,在不同的工作环境下合理利用不同步态,可提高机器人工作效率。快速移动步态下,机器人运动周期短,移动速度较快,可适应在水平、倾斜45°和垂直管道内爬行,其最大速度可达5.50 mm/s;载荷作业步态下,机器人具有稳定且较强的输出力,可在圆形管、正方形管、三角形管及变径管道中负载作业,最大负载能力为10 N;机器人应用载荷作业步态,可提供足够的接触力,可在54~59 mm的管道中稳定前行。
