机载光电系统目标定位大气折射修正研究
2022-09-13王惠林
王 冠,王惠林,骞 琨,沈 宇,边 赟
(西安应用光学研究所,陕西 西安 710065)
引言
侦察情报保障作为机载光电系统的一项重要功能,主要包含如下内容:一是获取侦察区域高精度图像,为判读识别提供基础;二是判读识别并定位侦察目标,为火力打击、地面行动等提供支援[1]。机载光电系统目标定位功能是侦察情报保障的根本,目标定位能力的高低、精确度直接影响作战决策、打击行动和毁伤评估等。获取侦察区域图像仅能判定目标的动向、态势等,而实际军事行动必需获取目标的精确地理位置信息,故目标定位是机载光电系统侦察能力的基本功能,也是核心功能[2-3]。
机载光电系统目标定位能力受传感器、测距仪、载荷平台稳定精度、飞行平台稳定精度和位置精度等综合因素影响。对于高空机载光电系统,光电系统目标定位能力除受上述因素影响外,还受大气环境的影响。由于光波在大气传输过程中会产生折射效应,导致光波传输过程中路径发生偏移,从而影响目标定位精度。对于高空机载光电系统远距离对地侦察,大气折射对目标定位的影响尤为严重[4-6]。
针对大气折射对光线偏折的影响,国内已开展了多方面研究。文献[4]介绍了一种大气折射率统计模型,利用雷达站点探空数据计算的射线描迹法求取大气折射引起的仰角和距离误差;文献[5]建立了低空大气折射率剖面,计算了光电系统在不同仰角下距离测量偏差和仰角测量偏差的大小;文献[6]推导出了实测大气模型下,目标视在距离的精确解析公式。
本文将从大气折射对目标定位的影响机理出发,分析大气折射对目标定位的影响因素。基于本文提出的介于圆球体和参考旋转椭球体之间的地球近似模型,给出机载光电系统目标定位大气折射误差模型,并在该地球近似模型下仿真分析大气折射对目标定位的影响结果。分析结果对机载光电系统远距离目标定位大气折射修正具有指导意义。
1 大气折射率求取
1993 开始,国际大地测量协会(IAG)组织专家Rüeger 对大气折射率进行了深入研究。通过总结和研究,Rüeger 教授指出,在指定标准大气环境为温度T=273.15 K,大气压强P=1 013.25 hPa,CO2含量x=0.037 5%,水汽压e=0.0 hPa 时[7],标准大气环境下大气折射率的计算公式为

式中λ为光学波长,单位为μm。由(1)式可得实际大气的折射率,可表示为

式中:a=0.269 578;P为大气压强,单位为hPa;T为空气热力学温度,单位为K;e为水汽压(空气中水汽的分压强),单位为hPa。
在波长范围380 nm~1 300 nm,温度范围-40℃~60℃,大气压强60 kPa~120 kPa,相对湿度范围0~100%的情况下,公式(2)所求取的折射率误差在0.3 ppm 以内,可满足一般精度的折射率计算要求。
2 大气模型
虽然地球大气压力、温度、湿度、密度等要素随时间和地点变化,但宏观上,地球大气由于重力作用可看作球对称分布[8]。以标准大气模型[9]作为计算依据,大气压强P、温度T和观测点海拔高度h关系如下:
a)大气温度
大气温度随海拔高度的变化为

b)大气压强
大气压强随海拔高度的变化为

c)水汽压

式中:e为水汽压,单位为hPa;E为饱和水汽压,单位为hPa;RH 为相对湿度,单位为%。
E值可根据空气温度t值直接从“湿度查算表”中查取,也可用下式计算:

式中:E为饱和水汽压,单位为hPa;a、b、c为与空气温度有关的系数(见表1 所示);t为空气温度,单位为℃。

表 1 a、b 和c 系数表Table 1 Coefficients of a、b and c
3 温度、压强、相对湿度和波长对大气折射率的影响
3.1 温度对大气折射率的影响
仿真参数如下:
海拔高度h=0 m;
大气压强P=1 013.25 hPa;
相对湿度RH=20%;
温度变化范围为-50℃~50℃。
以近红外波λ=1.064 μm 为例,基于大气折射率计算公式(2)与大气模型(3)式~(6)式,可得大气折射率(单位为ppm)随温度变化曲线,如图1所示。

图 1 大气折射率随温度变化曲线Fig.1 Curve of atmospheric refraction with temperature
3.2 压强对大气折射率的影响
仿真参数如下:
海拔高度h=0 m;
大气温度T=288.16 K;
相对湿度RH=20%;
大气压强变化范围为100 hPa~1 100 hPa。
以近红外波λ=1.064 μm 为例,基于大气折射率计算公式(2)与大气模型(3)式~(6)式,可得大气折射率(单位为ppm)随压强变化曲线,如图2所示。
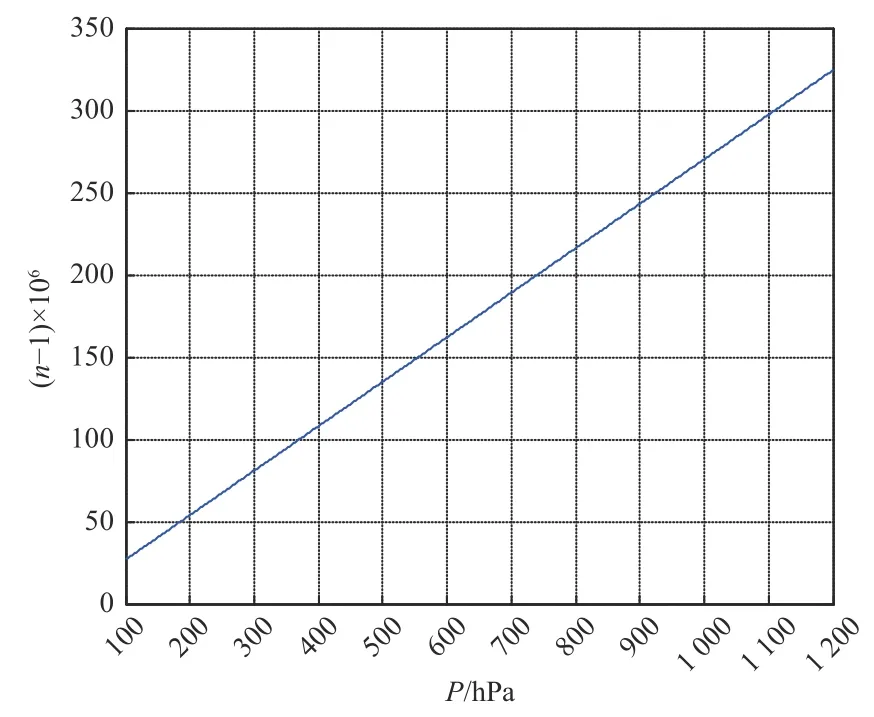
图 2 大气折射率随压强变化曲线图Fig.2Curve of atmospheric refraction with pressure
3.3 湿度对大气折射率的影响
仿真参数如下:
海拔高度h=0 m;
大气温度T=288.16 K;
大气压强P=1 013.25 hPa;
相对湿度RH 变化范围为0%~100%。
以近红外波λ=1.064 μm 为例,基于大气折射率计算公式(2)与大气模型(3)式~(6)式,可得大气折射率(单位为ppm)随相对湿度变化曲线,如图3 所示。
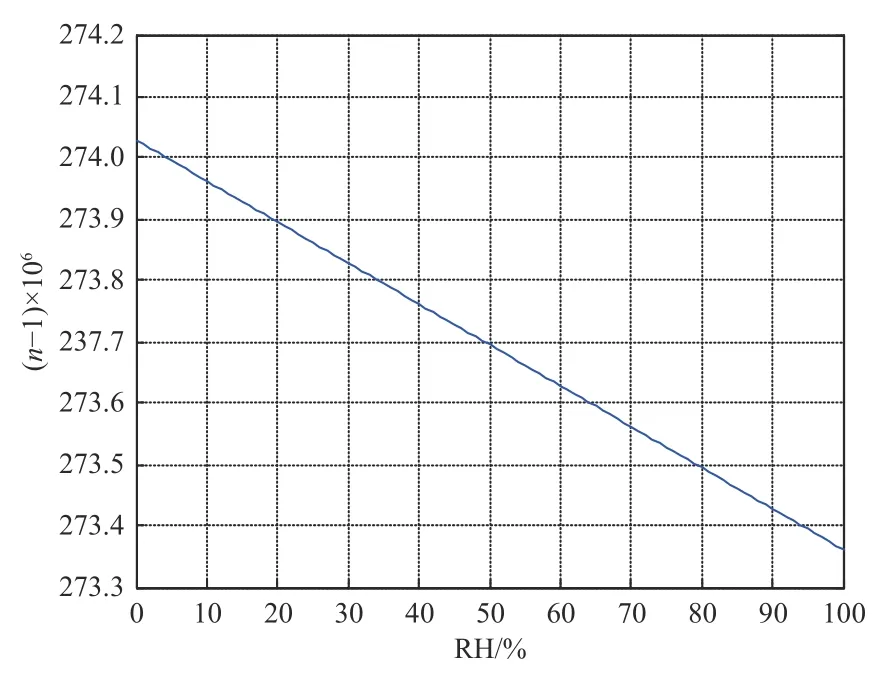
图 3 大气折射率随相对湿度变化曲线图Fig.3 Curve of atmospheric refraction with relative humidity
3.4 波长对大气折射率的影响
仿真参数如下:
海拔高度h=0 m;
大气温度T=288.16 K;
大气压强P=1 013.25 hPa;
相对湿度RH=20%;
波长范围为λ=0.33 μm~1.695 μm。
在上述仿真条件下,基于大气折射率计算公式(2)与大气模型(3)式~(6)式,可得大气折射率随波长变化曲线,如图4 所示。
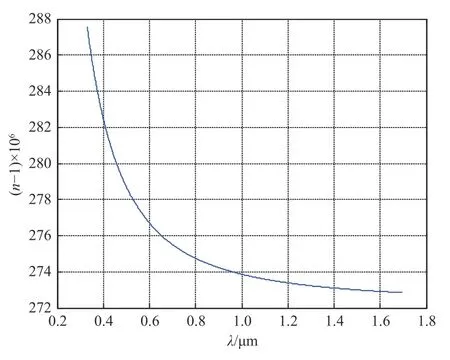
图 4 大气折射率随波长变化曲线图Fig.4 Curve of atmospheric refraction with wavelength
通过上述分析可知,在同一等高面上,大气温度越高,大气折射率越低;大气压强越大,折射率越高;湿度越大,大气折射率越低;波长越长,大气折射率越低。4 个参数中,大气压强对大气折射的影响权重最大,温度次之,波长与水汽压对大气折射的影响权重最小。
4 地球描述与误差建模
4.1 地球描述
地球常采用以下模型对其作近似描述[10-11]:
1)圆球体。球体中心位于地球中心,半径R=6 371 km;
2)参考旋转椭球体。球体中心位于地球中心,分别以Re和Rp为半长、短轴椭圆绕地球自转轴旋转180°形成,其中Re和Rp由大地测量确定。
4.2 误差建模
由于参考旋转椭球体模型相比于圆球体模型描述地球近似度更高,其在垂直方向相比于大地水准体的最大误差约为150 m,垂线偏离真垂线(大地水准面的法线)最大误差为3″[10],因此在目标定位中常用参考旋转椭球作为地球的模型描述。但考虑到大气折射求取常用的Snell 定律的使用条件为圆球体模型[12-15],无法直接使用参考椭球体模型对大气折射进行描述,所以为了提高大气折射的目标定位误差修正精度,本文定义了介于圆球体和参考旋转椭球体之间的地球模型来近似描述地球。
针对机载光电系统来说,其探测识别距离远小于地球半径6 371 km;同时,参考旋转椭球体球面相距100 km 两点的主曲率半径最大仅相差53 m;故可近似认为观测点和目标点间的扇形为圆球扇形,扇形半径为观测点垂直投影到地球表面的主曲率半径。该模型介于圆球体和参考旋转椭球体之间,与参考旋转椭球体模型具有较高近似度。该模型下机载光电设备目标测距大气折射示意图如图5 所示。

图 5 机载光电设备目标测距大气折射示意图Fig.5 Schematic diagram of atmospheric refraction in target ranging of airborne electro-optical equipment
图5 中,Oe-XeYeZe为地球直角坐标系;O-XYZ为地球直角坐标系沿Ze轴向下平移OeO后得到的直角坐标系;P点为机载光电系统所在点,其球面坐标为(λP,LP,hP)。P点发出的光线只有沿着直线方向I 射出时,才能沿PT弧线段(实线)到达目标点T处(T为旋转椭球面上某一点),我们称直线I 为目标直方向,PT弧线段为真实测距路径Rg。在真空环境下,P点发出的光线只有沿着直线方向II 射出时,才能沿PT直线段(虚线)到达目标点T处,我们称直线II 为目标真方向,PT直线段为理想测距距离R0。直线III 为P点的地理垂线,P0为直线III 与参考旋转椭球面的交点,P0O为参考旋转椭球面在P0点处的主曲率半径。直线IV 为平面TPO上PT弧线段在T点处的切线。图5 中,θP为机载光电系统坐标系经机载坐标系转换到地理坐标系下输出的俯仰角;δθP为大气折射引起的机载光电系统俯仰角误差;Re为沿真实测距路径Rg的视在距离(光波沿射线路径Rg的单程传播时间t与真空中的光速c之积)。
基于上述分析可知,扇形TP0O可近似为圆形扇形,扇形半径为P0点的主曲率半径,则有:

式中LP为P点的纬度值。
设T点折射率为nT,仰角为zT;P点折射率为nP,海拔高度为hP,仰角为zP;弧线段PT上任意点的折射率为n,仰角为z,与O点的直线距离为r。则根据Snell 定律有:

4.2.1 距离误差
通常,我们采用光波沿射线路径Rg的单程传播时间t与真空中的光速c之积来求取测距距离,并称其为视在距离Re,可由下式进行精确求解:

目标点和机载光电系统的扇形圆心角为

根据三角余弦定理,由目标T点和机载光电系统P点对地心的张角φP可得T点与P点间的理想测距距离Ro,即:

因此,机载光电系统对目标点的距离误差为

4.2.2 仰角误差
在三角形ΔTPO内,由三角余弦定理可得:

故大气折射引起的仰角误差δθP为

4.3 误差仿真分析
本文主要分析在近似标准大气环境、典型海面大气环境和典型沙漠大气环境下不同气候对光线偏折带来的影响。具体各大气环境参数见如下假设。
仿真参数设定为
1)近似标准大气环境(25°N,110°E)。城市3 月份月平均参数为
温度:13.01 ℃;压强:974.9 Pa;相对湿度:50%;参考海拔:357 m。
2)海面大气环境(35°N,120°E)。海面1 月份月平均参数为
温度:-0.67 ℃;压强:1 028 hPa;相对湿度:66.93%;目标海拔:0 m。
3)沙漠大气环境(40°N,90°E)。沙漠8 月份月平均参数为
温度:33.5 ℃;压强:951 hPa;相对湿度:0;参考海拔:768 m。
基于上述仿真条件,本文仿真分析了在20 000 m高度、波长1.064 μm 下,机载光电系统在不同俯仰角下(对应不同的测距距离)由大气折射引起的距离误差和仰角误差,仿真结果如图6 和图7 所示。
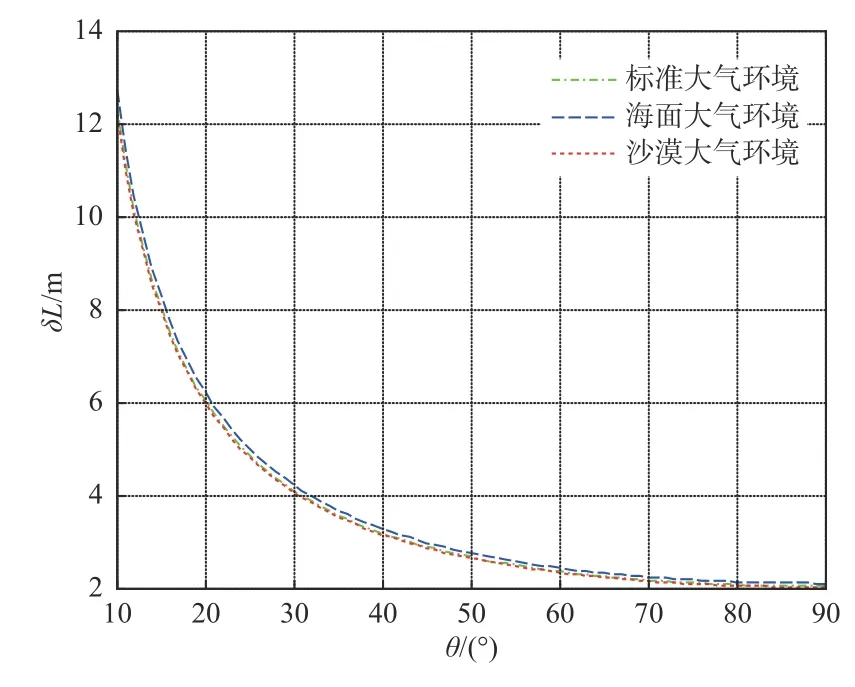
图 6 不同仰角下的测距误差曲线Fig.6 Range error curves at different elevation angles
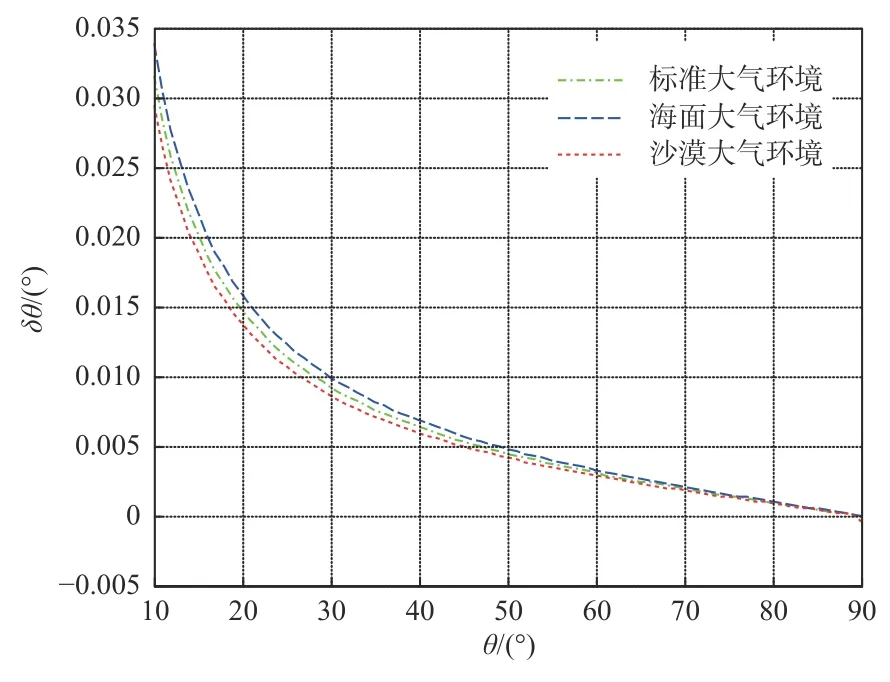
图 7 不同仰角下的仰角误差曲线Fig.7 Elevation error curves at different elevation angles
5 大气折射对目标定位的影响
5.1 大气模型验证
为验证本文选用的大气模型的正确性,本文根据2006年《中国参考大气》给出的月平均大气参数与大气模型生成的大气参数进行比对,同时根据二者所给的大气参数给出大气折射对目标定位的影响结果对比。以(35°N,120°E)该区域海面1 月份平均参考大气为例进行仿真验证,表2 给出了该区域1 月平均大气参数。

表 2 (35°N,120°E)区域1 月份平均大气参数表Table 2 Average atmospheric parameters for January in(35°N,120°E)region
基于大气模型的仿真数据,以及基于0 m 海拔高度处的压力、温度和相对湿度大气数据,反推出其他海拔高度处的大气参数。分别利用基于大气模型的仿真数据与《中国参考大气》给出的(35°N,120°E)区域1 月份月平均大气参数,计算大气折射对目标定位结果的影响,并可得到不同仰角下对应的定位误差,二者的定位误差差值如图8 所示。

图 8 不同仰角下的定位误差差值曲线Fig.8 Difference curve of positioning errors at different elevation angles
由图8 可知,实测大气数据和模型大气数据的差异对目标定位影响在工程实际应用中可忽略不计。故本文选用的大气测算模型可用于飞行高度在海拔0~20 km 内,对地/海面目标的大气折射引起的误差修正计算。
5.2 大气折射对目标定位影响的仿真分析
以前文选用的海面大气环境为例进行分析。针对20 000 m 典型高空,计算在不同探测俯仰角下的距离误差和仰角误差,可得大气折射对目标定位的影响结果,如表3 所示。
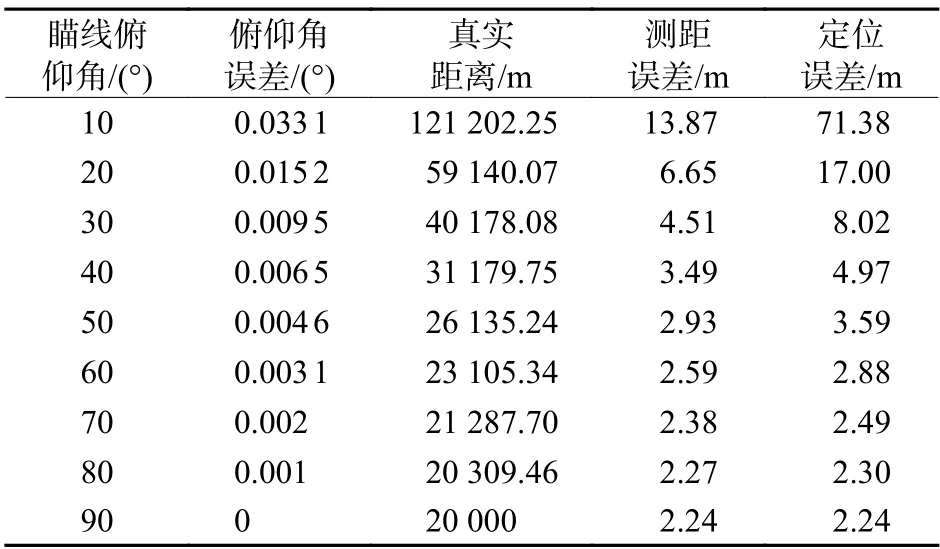
表 3 20 000 m 海面大气环境引起的测距误差和定位误差对照表Table 3 Comparison of range error and positioning error caused by 20 000 m sea surface atmospheric environment
从上述结果可以看出,在瞄线俯仰角大于30°时(30°时20 km 高度对应40 km 作用距离),大气折射引起的定位误差主要由距离误差组成,仰角误差对定位误差的权重较小。同时,在俯仰角大于30°时,大气折射引起光程增加导致的距离误差与高度近似成线性关系,可通过建立线性补偿公式对距离误差进行近似补偿。
当瞄线俯仰角小于30°时,俯仰角越小,由大气折射仰角误差引起的定位误差越大,所占误差权重也越大,此时不仅需要对大气折射引起的距离误差进行补偿,还需要对仰角误差进行修正。
6 结论
由上述分析可知,大气折射引起的光线传输偏折由两部分组成:一部分为大气折射引起的光程增加导致的距离误差ΔL,另一部分为大气折射引起的光线偏折导致的仰角误差δθP。若已知目标点或载机点的温度、压强、湿度信息,即可通过上述公式精确求取大气折射引起的距离误差ΔL和仰角误差δθP。若无法获取完善的大气数据信息时,目标点或载机点的温度、压强、湿度信息则需基于上述第2 节给出的大气模型,通过仿真提前建立不同区域下不同季节的误差查找表,以补偿大气折射引起的误差项。
由于大气折射修正过程较为复杂,且精确补偿须获取完备的大气数据信息,对于工程应用来说,大气折射引起的机载光电系统目标定位误差补偿与否,还需根据实际定位精度要求来决定。在一定的作战使用中,短距离目标定位时该误差所占权重较小,并不影响任务的执行,而在某些高空小倾角、远距离、高精度定位要求的情况下,大气折射引起的目标定位误差则不可忽略,需要对其进行精确修正。
