基于新型扫描昆虫雷达的迁飞昆虫目标检测及密度反演
2022-08-20罗伟刚刘汉哲
蔡 炯 王 锐,2 胡 程 罗伟刚 刘汉哲,2 张 娜
(1.北京理工大学信息与电子学院,北京 100081;2.北京理工大学前沿技术研究院,山东济南 250300)
1 引言
迁飞是昆虫离开不良生境、寻找有利生活繁殖地点的行为。我国地处东亚季风气候区,为昆虫季节性迁飞提供了稳定的风温条件,是全球最重要的昆虫迁飞场。水稻、小麦、玉米等作物重大害虫在我国远距离迁飞,是病虫害异地暴发的重要原因,对我国农业安全带来巨大挑战[1]。
早期动植物昆虫学家对昆虫的监测主要依靠空中网捕、光学观测等方式。然而,空中网捕等传统方式效率低、取样空间小,且无法获取昆虫迁飞轨迹等信息;此外,由于昆虫迁飞多发于夜间,光学观测等手段也受到极大限制。雷达具有全天候、全天时探测优势,且探测范围广,被认为是探测昆虫迁飞最有效的手段。1950 年,英国昆虫学家Rainey利用舰载雷达在尼日利亚首次观测到迁飞的蝗虫[2],成功证明了雷达观测迁飞昆虫的可行性。半个多世纪以来,各式昆虫监测雷达如雨后春笋般被研制出来。
当前昆虫雷达的主流体制分为垂直观测雷达和扫描昆虫雷达。垂直观测雷达采用垂直观测波束,利用波束章动、旋转极化等方式,可获取迁飞昆虫的数量、密度、轨迹,以及昆虫个体的生物学参数(体长[3]、体重[4]、头部朝向[5-6]、振翅频率[7-8]、起飞降落速度[9])。基于垂直观测雷达,诸多昆虫迁飞的科学现象被发现,极大推动了迁飞昆虫学的发展。例如,英国埃特斯特大学昆虫学家Chapman 教授观测到了昆虫的高度成层现象,发现了高空昆虫的主动定向行为[10-12];澳大利亚新南威尔士大学昆虫雷达专家Drake 教授研究了昆虫起飞降落行为[13-14]。但是垂直观测雷达波束宽度窄且垂直取样监测,导致观测范围非常有限,难以观测大范围的昆虫迁飞现象。
相较于垂直观测雷达,传统扫描昆虫雷达可在多个固定仰角下通过方位旋转扫描以获取更大的探测范围,在获取昆虫三维空间分布及密度分布方面更具优势。1968 年,英国物理学家Schaefer 为英国治蝗研究中心(Anti-Locust Research Centre,ALRC)研制了世界首台扫描昆虫雷达[2]。该雷达由X波段航海雷达改装,保留了原有的发射接收机,天线从扇形波束天线更换为笔形波束天线。该设计方案奠定了传统扫描昆虫雷达的基础,后续相继有不同型号的扫描昆虫雷达被成功研发,如英国毫米波扫描昆虫雷达、澳大利亚厘米波扫描昆虫雷达、美国厘米波扫描昆虫雷达以及中国厘米波扫描昆虫雷达。借助扫描昆虫雷达,英、澳、美、中等雷达昆虫学家发现了多种传统观测手段未观测到的生物学现象。
1968年,英国自然资源研究所(Natural Resources Institute,NRI)借助ALRC 在尼日尔、苏丹等地,开展了沙漠蝗虫、粘虫等的迁飞观测试验,首次发现了昆虫黄昏起飞、高度成层、共同定向等昆虫迁飞现象[15]。1987~1991 年,NRI 再次利用毫米波扫描雷达在菲律宾和中国成功观测了褐飞虱、稻纵卷叶螟等小型昆虫的迁飞行为[16]。1981~1984 年,澳大利亚Drake 教授利用澳大利亚厘米波扫描昆虫雷达成功观测到了飞蝗和夜蛾的迁飞活动,并建立了昆虫迁飞与低空急流、海风等气象学现象的关系[17]。1978~1985年,美国首部扫描昆虫雷达建成,在农业部西部棉花研究实验室Wolf教授的组织下,观测到了昆虫穿越墨西哥湾的迁飞行为[18]。2004年,中国农科院植保所与成都锦江电子有限公司合作,开发了我国的首部毫米波扫描昆虫雷达。该雷达被架设于广西兴安县的农科院基地内,成功监测到了褐飞虱、白背飞虱及稻纵卷叶螟等水稻害虫的迁飞[19-21]。
传统扫描昆虫雷达的工作模式是通过多个离散仰角的方位扫描来实现迁飞昆虫高度向的连续观测,难以准确获取雷达上方全空域的迁飞昆虫密度信息。此外,由于传统扫描昆虫雷达采用机械扫描,扫描重访周期长;同时雷达波形采用窄脉冲,分辨率低(几米到数十米),仅能粗略监测群体迁飞,难以精细获取昆虫个体的迁飞行为。为解决以上难题,北京理工大学开发了一种基于高分辨相控阵的新型扫描昆虫雷达。该雷达采用一维相控阵扫描体制,方位扫描通过机械旋转控制阵面来实现,俯仰扫描通过阵列合成控制波束来实现,雷达波位按半波束宽度紧邻拼接排布,可在短时间内实现对感兴趣空域的连续覆盖探测。同时,为实现对昆虫个体的测量,雷达采用调频频率步进波形来实现距离高分辨探测,可从群体中分离出个体进行观测,并进一步采用单脉冲测角技术来精确测量目标位置信息,能够准确获取雷达上方全空域的迁飞昆虫密度信息。
迁飞昆虫密度反演是新型扫描昆虫雷达的重要应用。然而,新型扫描昆虫雷达面临非均匀的强地杂波,传统检测方法将产生大量杂波虚警。因此,本文提出了一种基于静态杂波图的自适应变参VI-CFAR 检测方法,可在低仰角强杂波下实现昆虫的有效检测,为昆虫密度反演提供前提保障。此外,由于新型扫描昆虫雷达采用方位机扫、俯仰电扫的方式,扫描波束的空间排布具有不规则性,具体表现为俯仰波束电扫捷变导致方位波束扫描不连续,传统旋转积分方法难以计算不规则的扫描体积。为解决扫描体积计算问题,本文提出了一种基于雷达扫描体积微元化的密度反演方法,可准确获取波束捷变情况下的扫描体积,实现迁飞昆虫的精确密度反演。
本文结构安排如下:首先介绍基于高分辨相控阵雷达的新型扫描昆虫雷达的系统组成和工作模式;然后提出近地杂波背景下基于静态杂波图的变参VI-CFAR 检测算法,以及基于雷达扫描体积微元化的昆虫密度精确反演算法。最后,通过仿真与实测数据验证了所提方法的有效性与可行性。
2 基于高分辨相控阵的新型扫描昆虫雷达系统
新型扫描昆虫雷达采用有源相控阵、距离高分辨、单脉冲测角等先进技术,对大空域内的昆虫个体进行探测,为昆虫个体空间分布、起降行为的研究提供观测手段。该雷达系统包括有源相控阵天线阵面、机械转台等。其中,有源相控阵天线阵面是雷达的重要组成部分,由天线阵列、T/R 模块及馈电网络等组成,能够完成阵面各个收发通道信号的放大、发射、接收、配相等,实现俯仰向波束的快速捷变扫描。该雷达系统模型图如图1所示。
新型扫描昆虫雷达系统参数如表1所示。该雷达工作于Ku 波段,中心载频为16.5 GHz,发射功率达12 kW,阵面大小为2.3 m×2.1 m×0.46 m(长×宽×厚),半功率波束宽度为0.5°,单脉冲测角精度达0.1°。为了实现近距离、高分辨探测,雷达采用线性调频步进信号波形,子脉冲带宽为125 MHz,跳频点数为10,距离分辨率为0.2 m(加汉明窗后),可实现短脉宽、大带宽探测。
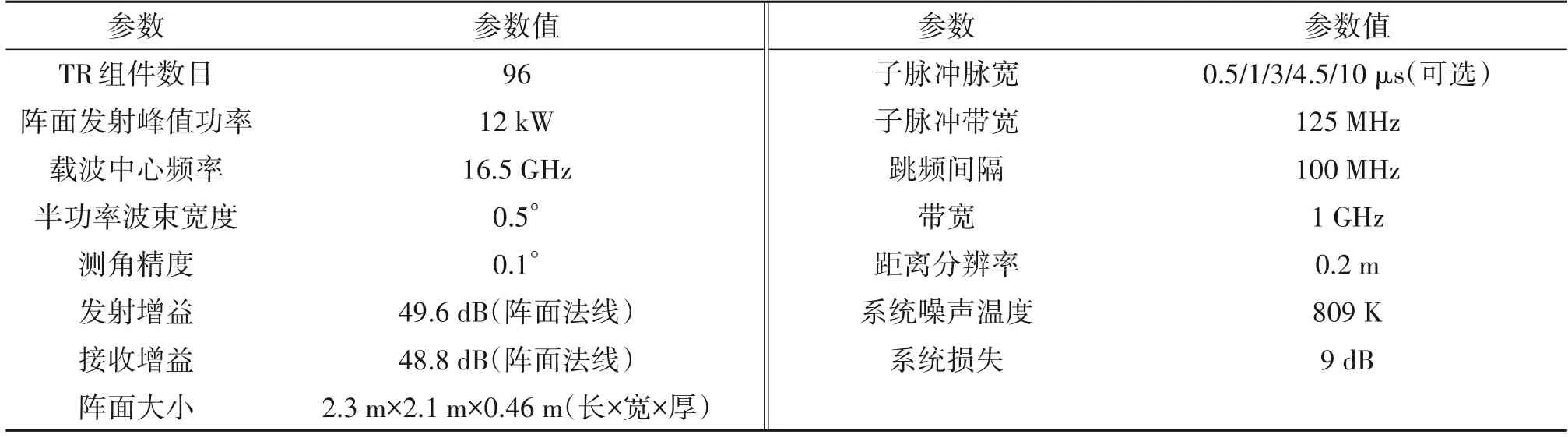
表1 相控阵雷达系统参数Tab.1 Phased array radar system parameters
新型扫描昆虫雷达的基本工作模式是统计模式,即在1 min 内实现对方位0°~360°,俯仰5°~85°范围的大空域扫描,覆盖区域为半径1 km、高度1.5 km 的圆柱(如图2 所示)。为了实现扫描空域的连续覆盖,在俯仰向电扫、方位向机扫的基础上,雷达波位设计遵循半波束宽度紧邻拼接原则,即:相邻俯仰波位的角度间隔不大于半功率波束宽度;俯仰向完成一次5°~85°电扫的时间内,雷达方位机扫角度不大于半功率波束宽度。因此,方位波位数量设计为720 个,俯仰波位数量为160 个,单波位驻留时间约为400 μs,具体参数如表2所示。

表2 统计模式工作参数Tab.2 Operation parameters in radar scanning mode
3 基于静态杂波图的自适应变参VI-CFAR检测方法
昆虫的恒虚警检测是密度反演的前提保证。新型扫描昆虫雷达近地杂波干扰强,采用AMTI 处理[22]仍会残留大量剩余杂波。此外,近地杂波在扫描与扫描之间起伏剧烈,因此杂波图检测技术[23]性能也大幅下降。可变性指示CFAR(VI-CFAR)[24]集合CA-CFAR、OS-CFAR、SO-CFAR 等多种CFAR 检测模块,可基于VI 指标自适应调用CFAR 检测模块,在多目标及杂波边缘等场景中检测性能稳定。然而,近地杂波分布存在非均匀特性,本质上更接近于目标。因此当待检测单元、参考单元位于杂波区内,VI-CFAR仍会产生大量杂波虚警。
针对近地杂波能量高、扫描间起伏、分布非均匀特性,本文提出了一种基于静态杂波图的自适应变参VI-CFAR 检测方法。该算法事先基于历史数据进行预处理提取杂波先验信息:1.根据历史高分辨一维距离像(High Resolution 1D Range Profile,HRRP),通过AMTI、迭代更新获取静态杂波功率图;2.利用固定门限检测生成杂波掩膜图,用于划分强弱杂波区。然后在实时处理过程中,对多帧HRRP通过AMTI实现自适应滤波,改善杂噪比。对于HRRP 中的待检测单元,依据静态杂波掩膜图判别所处杂波区,并进行分治检测。即,待检测单元若处于弱杂波区,利用VI-CFAR 检测方法进行检测判决;若处于强杂波区,则依据预处理的杂波先验信息调整参考单元、门限因子等阈值参数,再进行VI-CFAR检测。该算法的总体流程如图3所示。
3.1 杂波图预处理
杂波图预处理能够基于雷达历史HRRP生成静态杂波功率图、静态杂波掩膜图,为后续分治检测以及VI-CFAR 的自适应变参提供先验信息。杂波图预处理的详细处理过程可分为AMTI 处理、静态杂波功率图、静态杂波掩膜图三部分,具体细节如下所示。
3.1.1 AMTI处理
受环境因素以及接收机相位抖动的影响,部分强地杂波存在多普勒展宽。不同于只能在零频处形成凹口的MTI 技术,AMTI 能够基于回波数据样本估计出杂波特性,并自适应地生成权系数,在杂波所在的频率上形成凹口。
首先基于脉压后的多帧HRRP计算归一化协方差矩阵:
其中Xi=[x(1)x(2) …x(N)]T表示N个脉冲在第i个距离单元的信号。
然后对归一化协方差矩阵进行奇异值分解:
Λ是将奇异值λi由大到小排列的对角矩阵,最小特征值λN所对应的特征向量uN视为噪声子空间。如下式所示,将回波信号与特征向量uN相乘,即可映射到噪声子空间,抑制信号中的杂波能量。
3.1.2 静态杂波功率图
静态杂波功率图基于历史HRRP 构建在雷达扫描区域内的残余杂波强度分布,并在迭代更新一定次数后被保存。厂房、电力塔等近地强杂波进行AMTI 后,仍会有残余杂波。静态杂波功率图可反映经AMTI 处理后的残余杂波分布情况,并为杂波掩膜图以及VI-CFAR 的自适应变参提供先验信息。
静态杂波功率图存储的是各杂波图单元处背景功率的估计值。每个杂波图单元,利用其自身有限次的回波输入进行反复迭代得出该单元的杂波强度。雷达每扫完一个周期,杂波功率图都将得到更新。其迭代公式为:
其中k为杂波单元的编号,Pn(k)是对第k个杂波单元的第n扫描的更新值,qn(k)是第k个杂波单元的第n扫描的输出功率值,w是遗忘因子,其取值范围为0 ≤w≤1。迭代完成后的静态杂波图记为P(k)。
3.1.3 静态杂波掩膜图
近地残余杂波分布不均匀,呈聚集以及点散状的多形态分布,且局部的高杂噪比对VI-CFAR 检测带来挑战。静态杂波掩膜图以0 与1 分别表示空域的强杂波区及弱杂波区,为后续的自适应变参VI-CFAR 的分治检测及参考单元选取提供先验信息。杂波掩膜图p(k)在静态杂波功率图P(k)的基础上设置固定门限检测器获得,可有效指示强杂波区域,其判别准则如下所示:
式(5)中VST为固定门限,其表达式如下所示:
其中Pn为雷达接收机噪声功率,可预先统计获得。pfa为虚警率,需与后续VI-CFAR 检测器设置的虚警率保持一致。
3.2 自适应变参VI-CFAR检测
自适应变参VI-CFAR 检测器基于杂波先验信息自适应调整检测参数,实现对近地强杂波环境下的恒虚警检测。首先基于静态杂波掩膜图判定待检测单元是否处于强杂波区,对于处于弱杂波区的待检测单元可进行VI-CFAR 检测。而对于处于强杂波区的待检测单元,一方面基于静态杂波掩膜图自适应选取参考单元;另一方面基于静态杂波功率图计算当前强杂波区的杂噪比、自适应调整门限因子,保持强杂波区内的恒虚警检测。
3.2.1 弱杂波区VI-CFAR检测
弱杂波区大部分区域为噪底,但仍包含一部分弱杂波以及残余的杂波边缘,可通过VI-CFAR 实现恒虚警检测。VI-CFAR 检测器由CA-CFAR、GOCFAR 以及OS-CFAR 等检测器模块组成,并通过可变指标VI 和均值比MR 来判定待检测单元所处环境,具体原理如图4所示。
VI-CFAR的原理流程如图4所示,Xn为待检测单元,Xi(i=1,…,n) 和Xj(j=n+1,…,N)(n=N2)分别为前后沿参考滑窗。回波信号首先进行平方律检波及前后沿滑窗处理。前后沿参考窗内的信号利用公式(7)和(8)计算统计量VI 和MR,用于判别背景杂波类型。
其中KVI和KMR分别为阈值,其大小由虚警率和预先设定的置信水平决定。根据上述判断规则,按照图4 的逻辑选择相应的CFAR 方法。不同CFAR方法的门限因子可由下式反解得到:
其中TCA、TGO分别为CA-CFAR、GO-CFAR 的门限因子,TOS为OS-CFAR 和OSSO-CFAR 的门限因子。最后,将参考背景的杂波功率估计值与门限因子相乘,即可得到检测阈值。
3.2.2 强杂波区自适应变参VI-CFAR检测
强杂波区内杂波起伏剧烈且分布不均,严重影响VI-CFAR 的检测性能,易产生较多虚警。自适应变参VI-CFAR 检测器一方面可自适应调整参考单元,规避不均匀的强杂波区;另一方面基于待检测单元的杂噪比,自适应调节CFAR 模块的检测门限因子,以保持强杂波区内的恒虚警检测。
强杂波区内自适应变参VI-CFAR 检测方法如图5 所示,红色单元表示杂波掩膜图p(k)的强杂波区,区域内杂波起伏剧烈且分布不均,选其作参考单元易造成漏检和虚警。因此依据式(12),选临近分布较均匀的弱杂波区作为参考单元。
其中,REF为参考单元矩阵,X为经过平方律检波后的信号矩阵。从REF 中选取临近X0的前后各n个不为0的距离单元作为参考单元。
对位于强杂波区内的待检测单元,若仅使用弱杂波区作为参考单元,则强杂波的背景功率估计偏低,此情景下不能利用式(9)~(11)计算门限因子。针对强杂波区内的检测,可视强杂波为目标,结合静态杂波功率图提供的先验杂噪比,将其检测概率限定为虚警率。其各个CFAR 模块的门限因子由下式反解获取:
4 基于雷达扫描体积微元化的密度反演
为实现精确密度反演,新型扫描昆虫雷达需在俯仰波束捷变扫描体制下获取不同昆虫目标的雷达扫描体积。针对俯仰波束捷变下雷达扫描体积不规则的问题,本文提出了一种基于雷达扫描体积微元化的密度反演方法。此外,昆虫RCS存在浮动,对应的雷达扫描体积也不同,本文基于雷达扫描体积微元化分类计算不同昆虫的采样体积、密度,综合不同昆虫的密度结果获得群体的密度分布规律。
新型扫描昆虫雷达俯仰波束捷变,采用半波束宽度紧邻拼接的形式扫描空域,其扫描方式如图6中所示:Ru表示盲距;Rmax表示雷达接收波门的最远距离;θEleStr表示俯仰起始采样角度;θEleStp表示俯仰终止采样角度;Δh表示特定高度层高度,h1表示特定高度层的下底相对于雷达阵面的高度。波束指向随转台顺时针旋转,在方位旋转的过程中,重复完成俯仰维度的扫描。从雷达波束法线视角看到的波位运动示意图如图7。
图中,θ1表示一个俯仰波位所占俯仰角度;θ2表示一个方位帧所占方位角度;2 ⋅θ3表示相邻方位波束重叠的角度;θ5表示目标能被检测的最远偏离角;v表示波束方位向的运动方向。
4.1 密度反演算法
新型扫描昆虫雷达为获得精确的密度反演结果,将昆虫按高度层、RCS 归为不同类别,其密度反演的计算流程如图8所示。
(1)获得雷达观测时间内,检测到的目标斜距、RCS 等信息。昆虫的RCS 需根据及目标能量的信噪比,并基于雷达方程推算获得:
其中σinsect为昆虫RCS;Rinsect为昆虫离雷达的距离;SNRinsect代表目标信噪比,可在进行变参VI-CFAR检测时,根据目标能量与参考单元的比值估算获得;C1表示标定好的雷达常数;θ为目标偏离雷达垂直中心轴的角度;fG(θ)表示此偏角下天线的增益,可由雷达的天线主瓣方向图获得。
(2)根据雷达探测范围、自身需求等实际条件对高度层进行划分,设有n层;同时根据所有目标的最大RCS 与最小RCS,对RCS 的取值进行均匀的分段,设有k段。
(3)根据各个目标的检测信息,按高度层和RCS 段两个条件进行分类。位于同一高度层(h=h1~h1+Δh)、且RCS 处于同一RCS 段范围内的昆虫即归为一类,并统计其数目Num(k,n)。
(4)计算特定高度层第k个RCS 段的昆虫的雷达扫描体积Vsum(k,n)。
(5)根据目标的数量Num(k,n)及Vsum(k,n),可以得到第k个RCS 段目标在第n个高度层的密度ρ(k,n),最后累加即可得到在高度层n的昆虫目标总密度,其中K表示目标的RCS段数。
4.2 特定高度层雷达扫描体积
特定高度层的雷达扫描体积不规则、难以积分,本文采用体积微元化的方式累计获得。即,将某类昆虫的雷达扫描体积Vsum(k,n)波位化、并沿同一波位的波束中心轴线微元化为V(k,n,P,Q)。如图9 所示,V(k,n,P,Q)是沿着波束中心轴线切割得到的体积微元,P表示波束沿中心轴线切割而成的体积微元序号,Q∈J(k,n)表示特定高度层内的体积微元序号,J(k,n)表示特定高度层内的探测体积微元V(k,n,P,Q)数量。在微元化后,每个V(k,n,P,Q)可近似为圆柱,在此基础上减去与特定高度层的截断体积,累加即可得到最终的Vsum(k,n)。在第n个高度层、第k个RCS段目标的雷达扫描总体积Vsum(k,n)表达式如下:
其中Voff表示截断体积,体积微元被特定高度层上下底切割后所需忽略的部分。例如,图9 中的深灰色区块。
4.3 体积微元的计算
体积微元V(k,n,P,Q)是沿着波束法线切割得到的体积微元,在精细划分高度层和RCS 段后,每个体积微元可如式(18)近似为圆柱计算。
其中L=P⋅ΔL表示波束中心轴线方向上的斜距;ΔL表示该体积微元的高;r1表示在斜距L,某个RCS段目标能在该波束被检测到的、偏离中心轴线最远距离;θ5表示为与L对应的偏离波束中心轴线的最大夹角,体积微元中各参量的几何关系如图10所示。
为计算体积微元V(k,n,P,Q),需要获取斜距L对应最大夹角θ5及可偏离中心轴线最远距离(圆柱半径)r1,本文根据雷达方程及主瓣方向图迭代获得。
首先利用雷达方程可以计算波束偏离中心轴线不同θ5下,雷达能探测到的最大距离R(k,θ5)为:
其中C1表示雷达常数,可事先标定获得;fG表示雷达主瓣方向图,为高斯形状,fG的近似公式为:
其中θ3dB为雷达的3 dB 波束宽度,θ为目标偏离雷达垂直中心轴的角度,G0为波束轴的增益。
由于相控阵雷达进行目标检测时,只考虑自盲距到最大探测距离内的目标,因此实际处理中,式(19)中的θ5是一个极小数,则R=Lcos(θ5) ≈L。因此可将R(k,θ5)直接用L代替,并利用高斯迭代法完成对θ5的逼近计算,通过两次迭代能够得到精确的θ5:
第一次迭代:
重复上述步骤,进行第二次迭代可以得到:
由此,波束中心轴线距离L对应的波束截面半径r1为:
4.4 截断体积的计算
截断体积Voff表示的是在特定高度层中,体积微元被高度层上下底切割忽略的部分。例如,图11中的橙色区块。
任意圆柱被一平面穿越上底面或下底面斜截,则其被截断部分的体积计算公式为:
其中r1表示体积微元底面的半径,k=tan(θEle);θ4是忽略体积上下底面弓形的角度;a和b为积分项上下限,分别表示高度层截断圆柱上下底所对应的弧度。依据高度层与体积微元四顶点的相对关系,截断体积可分为30种情形考虑,具体公式见于附录。
5 算法性能仿真验证
5.1 基于静态杂波图的自适应变参VI-CFAR
为验证基于静态杂波图的自适应变参VICFAR 的检测性能,数值实验采用Monte-carlo 的方法分别对不同强度杂波环境下单、多目标进行检测仿真,对比杂波图技术、VI-CFAR 和自适应变参VI-CFAR 的检测性能。实验模拟昆虫目标,固定目标信噪比及速度,划分噪声区和杂波区两个区域,且杂波区内杂波服从高斯分布。分别将目标随机置于两个区域中,在经过AMTI 预处理后比较不同检测器的检测率和虚警率。仿真参数如表3所示。

表3 变参VI-CFAR的仿真参数Tab.3 Simulation parameters of variable parameter VI-CFAR
为验证自适应变参VI-CFAR 在单目标环境下的性能,模拟生成单一目标,在经过50 万次蒙特卡罗仿真后,分别统计三种检测方法在不同杂噪比条件下的虚警率曲线(图12)及检测率曲线(图13)。
①虚警概率:如图12所示,在杂噪比低于30 dB时,由于AMTI 的效果,三种检测器都能保持虚警率在10-6;然而随着杂波能量的进一步增强,由于杂波边缘的影响,杂波图的虚警率升高到2*10-5级别;VI-CFAR 由于能够利用VI 指标自适应选择CFAR检测器以适应杂波边缘,因此其虚警率上升至5*10-6;而变参VI-CFAR 能够调整参考单元始终位于噪声区,并利用先验的杂波功率图自适应调节检测门限,达到了恒虚警目标,虚警率始终保持于10-6。
②检测概率:三种检测率虚警率均保持于10-6,为如图13所示,VI-CFAR与变参VI-CFAR的检测概率始终一致;在低杂噪比条件下,杂波图技术检测概率要略优于另两种检测器,在高杂噪比条件下三种检测器的检测概率趋近一致。
为验证变参VI-CFAR 在多目标环境下的性能,模拟目标数目由1增为4,且模拟目标间相距5个距离单元,随机出现于杂波区与噪声区,其余仿真条件不变,获得三种检测器在不同杂噪比条件下的多目标虚警率曲线(图14)及多目标检测率曲线(图15)。多目标场景下的检测概率定义为:
其中Pd代表多目标场景下的检测概率;RNum代表一次蒙特卡罗仿真场景下的真实目标数目;ksim代表蒙特卡罗仿真次数;DNum代表所有蒙特卡罗仿真中检测到的目标数目总和。
①虚警概率:对比图12与图14可知,目标数目的增加不影响三种检测器的虚警率,变参VI-CFAR虚警抑制性能依旧最优。
②检测概率:图15 中,由于目标数目的增多,杂波图在迭代更新中混入了更多的目标能量导致检测性能下降严重;VI-CFAR 由于可在多目标环境下自适应选择OS-CFAR 模块,因此检测概率仅略微下降至0.7;变参VI-CFAR 由于在多目标环境中,参考单元依旧有大概率选在不含目标的噪声区域,从而选用CA-CFAR 模块,检测概率相比于传统VICFAR略高。
综上,从仿真结果上看,基于静态杂波图的变参VI-CFAR 在强杂噪比条件及多目标环境下,恒虚警能力及检测能力综合上最优。
5.2 基于雷达扫描体积微元化的密度反演
为验证密度反演算法的正确性,本文首先预设不同高度层的昆虫密度作为真值,并基于此密度在大空域内(远大于雷达探测区域)随机生成不同RCS的昆虫目标;然后利用相控阵雷达主瓣方向图、扫描角度以及雷达方程筛选出能被雷达检测到的目标;最后基于本文提出的新体制下密度反演算法估计出昆虫密度,并与预设的密度真值进行对比验证。
此次仿真中预设的昆虫密度在高度方向上呈高斯曲线形状,其均值为1000 m,标准差为200 m。在高度1000 m 处昆虫密度取最大值为8*10-5只/m3。其次,如表4 所示,同时设计了3 类不同RCS 段的模拟目标生成于以雷达为中心的3.2 × 1010m3体积范围内(长4000 m,宽4000 m,高2000 m),三种模拟目标数目均分。

表4 目标仿真参数Tab.4 Target simulation parameters
仿真的雷达参数与实际新型昆虫雷达系统参数一致。经过高精度昆虫目标反演,得到三类目标的密度分布如图16~图18所示。
将反演的三类目标密度累加获得昆虫总体密度分布并与预设的密度作比,以验证密度反演算法的准确性。如图19 所示,经相互对比,反演结果与预设密度的均方误差MSE=6.1 × 10-12,说明本文的密度方法可信度高。
6 生物科学观测试验
为验证新型扫描昆虫探测雷达的实际性能,该雷达被安装于山东省东营市现代化农业示范基地中,并于2021 年9~11 月长时间观测经过渤海湾迁飞进入东营境内的飞鸟及昆虫:在白昼利用新型扫描昆虫雷达引导一部光电设备(图20)联合观测候鸟;在夜间利用新型扫描昆虫雷达及一部垂直观测昆虫雷达(图21)对比观测昆虫。本文利用鸟群观测数据验证自适应变参VI-CFAR 的实际性能,并利用夜间虫群数据对比验证新型昆虫雷达密度反演算法的准确性。
6.1 基于白昼鸟群观测数据的变参VI-CFAR 性能实测
由于东营农业示范基地周围存在大量工厂、高压电塔等强地杂波建筑物,光电设备可用来辅助验证雷达检测到的目标是否为主瓣进入的目标,以区分副瓣进入的近地强杂波。如图20 中左侧红框内为后续加装天线罩时的新型扫描昆虫雷达,右侧红框内为光电设备。受限于当前光电设备的变焦性能影响,该光电设备仅可观测到大型的迁飞候鸟,难以观测高空小昆虫。为了以白天新型扫描昆虫雷达与光电设备联合观测的实测数据验证基于静态杂波图的自适应变参VI-CFAR的检测性能。
如图22所示为经典白昼鸟群观测数据,左侧为新型扫描昆虫雷达利用自适应变参VI-CFAR 持续检测跟踪获得的10屏鸟群点迹空间分布图,从中可以看出新型扫描昆虫雷达实际跟踪了三群候鸟,并在50 m~100 m 的低高度处存在少量从由副瓣进入的地杂波。实验中,新型扫描昆虫雷达实时发送鸟群位置信息引导光电持续跟踪其中一群候鸟(图22蓝色方框),光电设备抓拍到对应的鸟群实景图像(图22右侧),从光电图像中,可以看出该鸟群为“一字”队形的大雁。
为验证基于静态杂波图的自适应变参VICFAR 性能优势,分别利用杂波图技术、VI-CFAR 检测器对该组数据进行处理,获得10屏鸟群点迹空间分布图。图23、图24 分别为基于杂波图的实测数据检测结果以及基于VI-CFAR 的实测数据检测结果,可以看出常规VI-CFAR 以及杂波图检测在杂波抑制方面明显差于自适应变参VI-CFAR。
为定量对比三种检测器在实测数据中的检测性能,本文进一步统计了50 m~100 m 高度处,三种检测算法的杂波虚警点数以及“一字”型雁群处的目标检测点数,其结果如表5 所示。由于候鸟信杂噪比较高,三种检测器对雁群的检测结果基本一致;但对于低高度的杂波,由于实际数据中,该杂波区的非均匀分布特性,导致传统VI-CFAR 出现大量虚警,虚警抑制性能最差;而杂波图技术的虚警抑制性能有了较为明显的改善;基于静态杂波图的变参VI-CFAR 检测器性能最优,相较于杂波图检测技术,虚警抑制率提高了13%。

表5 三种检测器实测数据检测结果Tab.5 Detection results of three detectors based on test data
6.2 基于夜间虫群观测数据的密度反演算法实测
虫群迁飞行为多发生于夜间,传统光电、网捕手段难以观测。为验证新型扫描昆虫雷达密度反演算法的正确性,本文以一部相同波段的垂直观测雷达为对照组对比验证新型扫描昆虫雷达密度反演的正确性。该型号垂直观测雷达已在2018~2021年间分别在内蒙古锡林浩特、云南澜沧及江城等多地进行了大量的生物科学观测试验验证,包括昆虫体轴朝向、振翅频率、上升下降速度以及密度分布等重要迁飞参数的反演测量,反演可靠性高。由于两部雷达的工作波段存在重叠,为防止两部雷达间的信号互扰,对照组的垂直观测雷达被安放于东营农业示范基地的高楼建筑物的顶楼(如图21所示),该位置仅与新型扫描昆虫雷达直线相距1 km,以防止距离差异导致昆虫密度的不一致性。
为验证新型扫描昆虫雷达的密度反演性能,本文以2021 年9 月17 日夜间至次日凌晨的观测结果为例与垂直观测雷达进行具体比对分析。图25 为2021 年9 月17 日至9 月18 日东营市夜间虫群爆发时,两部雷达分别观测到的昆虫数量(单位:只)以及密度(单位:只/m3)的时间-高度二维分布图,图25(a)及图25(c)分别为基于垂直观测雷达获得的数量、密度的时空分布图,图25(b)及图25(d)分别为基于新型扫描昆虫雷达获得的数量、密度的时空分布图。
①对比图25(a)与图25(b)可以看出:垂直观测雷达由于固定垂直向天照射,雷达扫描体积偏小导致数量远低于新体制扫描昆虫雷达,因此新体制扫描昆虫雷达数量分布图细节更加丰富。垂直观测雷达的数量分布图分辨率更差,仅在昆虫数量较多时的轮廓与新体制昆虫雷达一致:例如,图25(b)显示17日22点至18日4点高度400 m~700 m 聚集有大量昆虫,而在此区间内的垂直观测雷达仅有大致轮廓。
②图25(c)与图25(d)分别为两部雷达的密度反演结果,垂直观测昆虫雷达密度反演结果细节存在缺失;而新体制的密度随时空的二维分布图更丰富,更容易观察到迁飞昆虫的变化规律:17 日22 点两组昆虫分别聚集于200 m、500 m 附近的高空;17 日22 点至17 日23 点,两组昆虫逐渐爬升,分别飞至600 m及800 m高度;17日23点至18日4点,昆虫稳定集中于600 m 及800 m 高度层;18 日4 点至5 点,虫量降低;18 日5 点至9 点,200 m~300 m 低空出现大规模虫群。
③比对图25(b)与图25(d),即对比新体制扫描昆虫雷达的数量、密度随时空的变化差异,二者在整体趋势上也基本一致,但密度相比于数量能够更精确地反映虫群变化规律。例如,图25(b)中显示17 日22 点,昆虫数量集中分布于高度500 m~600 m的高度层,并且数量在此区间内分布较为均匀,而200~300 m 高度的虫量无明显优势;但图25(d)密度的二维图,更加精准地反映昆虫在17 日22 点200 m、500 m 附近的高度层都存在虫群聚集,且200 m附近虫群的密度更大。
7 结论
传统扫描昆虫雷达扫描非连续、个体分辨能力差,为此本文介绍了一种基于高分辨相控阵的新型扫描昆虫雷达系统。该雷达俯仰电扫、方位机扫,可在1 分钟内连续覆盖大空域(方位0°~360°、俯仰5°~85°)。此外,新型扫描昆虫雷达采用线性调频步进频率波形以及单脉冲测角机制,实现距离、角度的高分辨。为抑制低仰角下近地杂波虚警,本文提出了一种基于静态杂波图的自适应变参VI-CFAR检测算法。该算法基于杂波先验信息将检测区域分为强弱杂波区,能够自适应调整VI-CFAR 的检测参数,实现非均匀强杂波背景下的恒虚警率检测。同时利用仿真实验、白昼鸟群的科学观测试验,比对了杂波图检测、VI-CAFR 检测以及所提检测算法的检测性能,试验结果显示基于静态杂波图的自适应变参VI-CAFR 在杂波抑制及目标检测方面综合性能最优。针对新型扫描昆虫雷达的一维相控阵扫描体制,一种基于雷达扫描体积微元化的密度反演算法被提出。该算法根据高度、RCS将昆虫分类统计,并微元化思想将波束离散成多个体积微元,利用雷达方程、天线主瓣方向图,获取特定高度层的雷达扫描体积及昆虫群体密度。仿真实验验证了该密度反演算法的准确性,夜间虫群业务化观测试验获取精细的昆虫密度时空分布图,观察到夜间昆虫的成层聚集现象,反映了基于雷达扫描体积微元化的密度反演算法的精确反演性能。
附录
在第4.4 节中,为计算特定高度层的雷达扫描体积,在对扫描体积微元化后,需依据高度层与体积微元四顶点的相对关系计算截断体积Voff。对于某一高度分层区间[hlow,htop]截取体积微元的截断体积Voff,需分hB1≤hB3以及hB1>hB3的两种总体条件进行讨论:
(1)hB1≤hB3
如图26 所示,雷达俯仰角较低时,则hB1≤hB3。特定高度层将穿越圆柱形体积微元的上底面或下底面形成截断体积。因此,可依据式(24)和[hlow,htop]与体积微元四顶点高度的相对关系,将截断体积Voff分为15种情形进行计算,具体见表6。

表6 低仰角下截断体积计算情形Tab.6 Fifteen calculation cases of truncated volume at low elevation angle

续表6
(2)hB1>hB3时
雷达俯仰角较高时,则hB1>hB3。大部分情形下,特定高度层将穿越圆柱形体积微元的上底面或下底面形成截断体积,因此可基于式(24)计算截断体积。但如图27 所示,在某些特殊情形下,特定高度层将穿越圆柱形的两侧高形成截断体积,此时可用割补法将不规则的截断体积等价成小圆柱。在此基础上,依据[hlow,htop]与体积微元四顶点高度的相对关系,将截断体积Voff分为15种情形进行计算,具体见表7。

表7 高仰角下截断体积计算情形Tab.7 Fifteen calculation cases of truncated volume at high elevation angle
