基于最小熵的机动目标雷达检测
2022-08-20蔡炯王锐,2胡程
蔡 炯 王 锐,2 胡 程
(1.北京理工大学信息与电子学院,北京 100081;2.北京理工大学前沿技术研究院,山东济南 250300)
1 引言
雷达中的机动小目标检测一直是信号处理中的热点、难点问题,典型的机动小目标包括小型无人机、飞鸟等。随着制造工艺、自动控制等技术的提升,无人机日趋小型化、机动化,美军因此也将小型无人机的发展上升到战略层面[1]。除此之外,近几年,由“黑飞”无人机、飞鸟等低空机动目标导致的民航客机撞机事件频发[2],严重影响国家公共安全,空中小型无人机、鸟类等典型飞行目标的雷达探测已成为当前迫切需求以及研究热点。空中小型无人机、飞鸟等目标体型小、重量轻,RCS弱,导致雷达回波信噪比极低,难以检测,必需对目标回波长时间相参积累以改善信噪比。然而,由于空中无人机、飞鸟等目标飞行机动灵活,运动过程中时常存在加速度、加加速度等高阶运动分量[3],导致多普勒频率徙动(Doppler frequency migration,DFM)现象产生,积累后目标散焦,信噪比不足,漏检严重。
为了解决目标机动产生的DFM 现象,国内外学者提出了多种高阶运动分量补偿算法以克服积累后多普勒维上的散焦。这些算法大多通过遍历搜索等方式估计出目标的高阶运动分量,然后据此构造高阶运动分量共轭信号,经过匹配滤波,消除高阶运动分量完成信号的DFM 的补偿,较为经典的有分数阶傅里叶变换(Fractional Fourier transform,FRFT)[4]、Radon-Fourier 变换(RFT)[5]、广义RFT[6]、离散多项式相位变换[7]以及它们的改进算法。例如,文献[8]利用分段处理的思想对FRFT 进行改进,其首先通过较粗的搜索方式确定目标加速度的大致范围,然后利用牛顿法迭代得到更为精细的估计结果,一定程度减轻了FRFT 的运算负担;为克服广义RFT 计算量大的问题并提高多目标场景下的算法效率,文献[9]提出了一种基于多粒子群的寻优方法,有效检测到了空中的迁徙害虫。
然而当前大多数研究都是针对只含二阶运动分量(匀加速)的目标,对加加速度等高阶运动分量的估计补偿方法较少。在实际雷达场景中,由于目标的时变运动以及雷达视线与目标的空间几何关系,目标相对于雷达的径向运动将变得尤为复杂,往往含有加加速度等更高阶的速度分量。在此场景下,大多传统的高阶运动分量补偿算法存在补偿效果不佳、运算量过大等性能局限问题。为此,本文提出了一种基于最小熵的机动目标检测算法,相较于其他同领域研究成果,本文贡献如下:
(1)提供了一种高阶运动分量的通用估计补偿算法,利用仿真和实测数据证明其能有效补偿加速度、加加速度等高阶分量;
(2)以多普勒频谱熵为代价函数,推导了相应的迭代寻优公式,可高效地实现高阶运动分量的参数估计。
2 算法原理
在图像处理当中,由于图像熵具有较好的凸优化性质,往往被作为代价函数,用于参数的迭代寻优估计[10]。而类似地,在雷达信号处理中,若不对目标信号进行DFM 补偿,当目标存在高阶运动分量时,直接进行动目标检测(Moving Target Detection,MTD)处理,其能量在多普勒频谱上将会发散,不能理想地聚焦(熵值较大);如果高阶运动分量补偿完成后,再进行MTD 处理,则能够得到良好的聚焦频谱(熵值较小)。受此启发,本文提出了一种基于最小熵的机动目标检测算法,首先对目标回波时域加窗并进行FFT 以获得其多普勒频谱;然后针对目标频谱,以频谱熵为代价函数,通过牛顿法快速迭代搜索加速度、加加速度等高阶运动分量以使频谱熵最小化;最后,利用搜索到的高阶运动参数补偿目标信号的高阶相位,即可完成相参积累。
2.1 多普勒频谱熵
熵在图像中可以表示图像的混乱、复杂程度。如下图1所示,熵值越大,图像就越无序(散焦)、随机、复杂;反之图像熵越小,图像就越有序(聚焦)、规则、简单。图像能量能完全聚焦于一点,熵值达到理论上的最小值0。一幅图像的熵可利用下述公式计算:
其中|z(m,n)|代表图像中一像素点的幅值。C为归一化系数,是整幅图像的能量,C=。
受此启发,我们将熵值应用于多普勒频谱的评估中。如图1(a)所示,当目标存在高阶运动分量时,直接进行MTD 处理,目标的能量在频谱上将会发散,熵值较大(4.8075),不能理想地聚焦于某个多普勒频率。这导致脉冲积累增益降低,不利于后续的目标检测。而如果高阶运动分量补偿完成后,再进行MTD 处理,如图1(b)所示,则能够得到良好的聚焦图像,熵值较小(1.7731),信号最大值相比于直接MTD,提升了12 dB左右。
在速度估计相同的情况下,高阶分量的估计补偿越准确,得到的熵值就会越小。因此,可以将速度设置为一固定值(通常可以为0),将熵作为补偿高阶运动分量的代价函数,通过最优化频谱熵可以实现高阶运动分量的补偿,以及准确估计的目的。
假设雷达为脉冲多普勒雷达,其相位补偿模型可表示为:
其中,s(m)为脉压后第m个脉冲的目标信号,φm为相位补偿量,S(k)为相位补偿后的多普勒谱。当目标做高阶运动时,相位补偿量φm可以表示为:
其中λ为雷达波长,T为PRT,ah代表h阶运动分量大小。
此时多普勒频谱的熵可表示为:
2.2 时域加窗
本文以熵为代价函数,通过牛顿法迭代寻优,然而,牛顿迭代法只能保证熵收敛于某个局部极小值,其并不一定是全局最小值。为了让算法更易于收敛于最小值,本算法通过时域加窗对回波信号进行预处理,即对原始的雷达回波信号加权高阶次的汉明窗后进行FFT获得主瓣展宽后的频谱,以作后续迭代运算处理。
时域加窗能够展宽MTD 频谱主瓣,平滑熵值曲线,从而保证算法易于收敛到最小值。如图2所示,为一时域加窗的仿真示例效果。图2(a)为未加窗时,频谱熵随补偿的二阶运动分量的变化曲线,可以看到此时熵值变化曲线存在众多极小值点,易造成牛顿迭代法陷入局部最优解;而图2(b)为目标信号回波时域加权高阶汉明窗后的熵值变化曲线,可以看到加窗后熵值曲线更加平滑,极小值点大大减少,并且最小值点的横坐标位置保持不变,这样能够保证牛顿迭代法可较为轻易地收敛于最小值,估计出最佳的高阶运动补偿分量。
2.3 迭代寻优
补偿高阶运动相位后的多普勒频谱S(k)将具有较小的熵,因此可以通过最小化S(k)对应的熵E来估计目标高阶运动分量。其最优化数学形式为:
对于此最优化问题,我们利用牛顿法迭代求解。第i迭代中,将熵在处泰勒展开,可表示为:
(2)m≠l时,则
3 算法验证
3.1 仿真验证
3.1.1 补偿性能测试
为了形象地说明基于最小熵的积累算法的迭代过程以及最终补偿性能,我们设计了一个含有三阶运动分量的目标场景,提取多个脉冲目标脉压后的信号,并分别直接MTD,利用FrFT 以及本文方法进行补偿。仿真中的具体雷达系统参数、目标参数如表1所示。
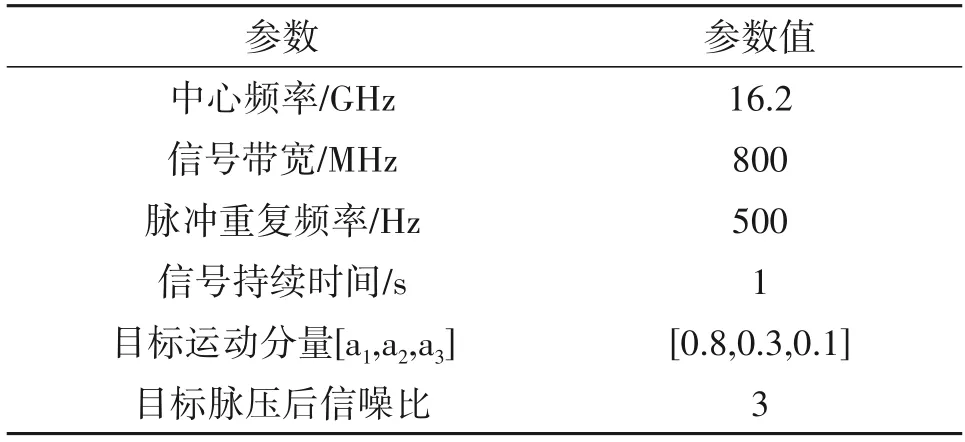
表1 仿真参数Tab.1 Simulation parameters
对于本文最小熵的方法,设置一、二、三阶运动分量的初值都为0,迭代求解二、三阶运动分量,迭代终止条件为各阶运动分量的一阶导数绝对值小于1e-4,其结果如图3所示。从图3(a)中可以看到,尽管高阶运动分量的初值都为0,但随着迭代次数的增多,二阶、三阶运动分量逐渐趋近于真值[0.3,0.1],在第417 次迭代时,由于一阶导数较小,达到迭代终止条件,最终得到二阶、三阶运动分量的估计值[0.34,0.07]。利用此估计值。
图4展示了直接MTD 处理、经过FrFT补偿加速度后MTD 以及最小熵补偿后MTD 的对比结果,可以看到直接MTD后,信号频谱能量发散、呈带状,最大值约为37 dB;通过FrFT搜索加速度进行补偿后,DFM 有所改善,信号多普勒频谱的能量更加集中,最大值约44 dB;而利用本文的最小熵补偿后,DFM产生的频谱能量扩散现象被极大抑制,积累后的最大值为52 dB,较FrFT补偿效果提高了8 dB。
3.1.2 检测性能测试
为了进一步验证基于最小熵的积累算法对强机动目标的检测性能,我们对补偿后的频谱进行单元平均恒虚警率检测(CA-CFAR),并采用蒙特卡罗仿真方法测试不同信噪比的目标检测概率。即,沿用表1的雷达系统参数,生成含有三阶运动分量(加加速度)的固定目标雷达回波,改变目标信噪比,在固定虚警率的条件下,采用基于最小熵的积累检测算法进行恒虚警检测并与真值对比,多次重复实验统计不同信噪比下的目标检测概率,并与相同条件下的MTD、FrFT 积累算法作对比,蒙特卡罗仿真具体参数如表2所示。
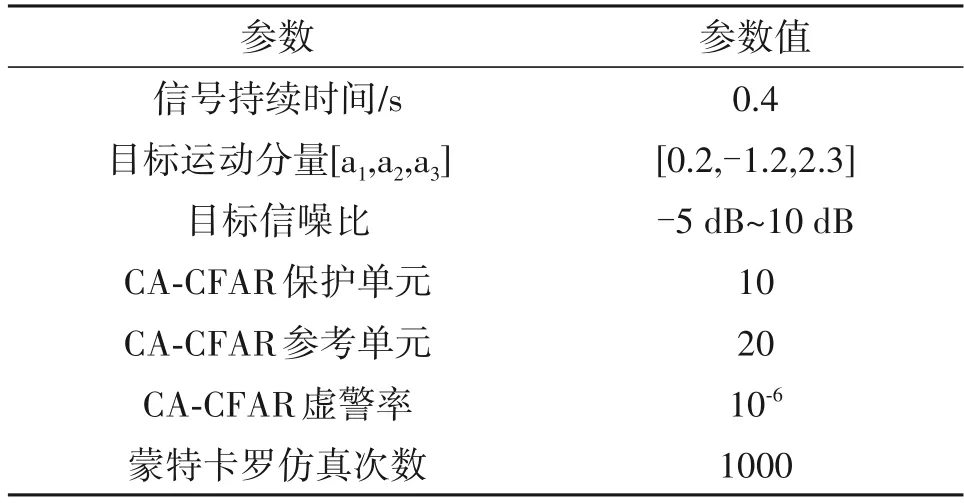
表2 蒙特卡罗仿真参数Tab.2 Monte-Carlo Simulation parameters
经过1000次的蒙特卡罗仿真,分别统计三种积累算法对不同信噪比条件下检测出目标的次数,并与总次数作比,计算检测概率,其结果如图5所示。
基于最小熵的积累方法能够补偿目标的高阶运动分量,抑制多普勒频谱的能量发散,因此相比于MTD、FrFT 检测性能最佳,当目标信噪比为3 dB时,检测概率即可在90%以上;
FrFT 与MTD 只能补偿低阶的运动分量,因此积累增益较低,在低信噪比条件下其检测概率要低于基于最小熵的积累算法;
FrFT 与MTD 未能补偿高阶的运动分量,存在多普勒频谱能量发散现象。从检测概率曲线中可以看到,当目标的信噪比增大到一定程度后,发散的频谱能量将混入到CA-CFAR的参考单元中,导致检测门限过高,检测概率不变甚至下降。
3.2 实测验证
为了验证算法对于实测数据的有效性,我们使用了一部Ku 波段的高分辨雷达(雷达系统参数与表1 一致)进行空中目标探测试验,并利用传统的MTD、FrFT 以及本文的方法分别处理,对比积累效果。为了减少外界杂波影响,雷达被放置于平坦的草地上垂直对天观测,监测迁徙的鸟类。如图6(a)所示,为试验雷达观测到的典型鸟类机动场景,可以清晰地看到该目标距离随时间的变化关系为一曲线,说明其速度存在变化,发生了DFM。
通过动态规划检测前跟踪[11]等信号处理手段,可提取此机动目标信号(如图6(d)红线)。由于目标信号中可能含有目标微动产生的微多普勒分量,而微多普勒分量也能使目标多普勒频谱展宽。为了更准确地评价目标机动产生的DFM 影响,我们通过短时傅里叶变换进行时频分析(如图6(b)),并保留主多普勒分量(如图6(c)),通过逆变换获得只含主多普勒分量的目标信号(如图6(d)蓝线),以此排除微多普勒带来的DFM 影响。
经过时频分析处理后可得剔除微多普勒分量后的实测目标回波,分别利用MTD、FrFT 以及最小熵等三种算法,对其进行积累处理。如图7(a),直接对提取的目标信号做MTD,可以看到目标信号的多普勒频谱发生明显扩散,最大值约130 dB;利用FrFT 完成加速度补偿后进行MTD,DFM 得到改善,最大值提高6 dB,约为136 dB;而利用最小熵的方法补偿加速度、加加速度后,目标频谱能量得到更一步集中,最大值较直接MTD 提高了8 dB,约为138 dB。图7(b)为图7(a)的主瓣区域局部放大图,可进一步清晰地反映最小熵补偿与FrFT 补偿的效果差异,其中经过FrFT补偿后,频谱发生错峰现象,无清晰的主瓣,易在后续检测中导致多检现象;而经过最小熵补偿后,目标信号频谱只存在一个最高的主瓣,并且左右两个第一副瓣基本对称,较好地符合补偿后理想的目标频谱模型。因此综合比较来看,本文方法对实测数据依旧具备较好的DFM 校正性能。
4 结论
在相参积累中,机动目标易发生DFM 现象,导致多普勒频谱发散,漏检概率增大。针对此问题,本文提出一种基于最小熵的机动目标雷达检测算法,其以多普勒频谱的熵为代价函数,通过牛顿迭代法估计高阶运动分量并做补偿,完成DFM 现象的校正。通过仿真以及实测数据测试,以MTD 以及FrFT 为参考,我们验证了基于最小熵算法的补偿性能。本文算法能够有效地估计出目标信号的高阶运动分量,补偿后聚焦效果相对于传统的FrFT更佳。
