喷水推进舰艇自航运动数值计算研究
2022-08-17张富毅陈泰然王国玉
鲁 航,张富毅,陈泰然,黄 彪,王国玉
(北京理工大学 机械与车辆学院,北京 100081)
0 引 言
与螺旋桨推进相比,喷水推进具有快速性和高机动性的特点,而且在抑制空泡和提高推进效率方面具有优势[1-2],被广泛应用于两栖车辆、高速舰艇等航行体。喷水推进舰艇具有广泛的军民用前景以及巨大的发展潜力,未来战争对船舶提出了更高的需求,因此,推进器技术已经成为决定性因素,对喷水推进舰艇的运动开展研究具有重要的工程实践意义。
随着计算流体力学的发展与算法的进步,数值模拟在船舶研究中起到重要作用,可预先对试验研究进行模拟,减少人力物力投入。Carrica 等[3]结合非稳态单相流,采用重叠网格预报了迎浪线性规则波中DTMB 5512船模的运动。Jensen等[4]用CFD方法计算船体水动力,通过自由面捕捉分析了船舶运动过程中自由面兴波的影响。Guo等[5]采用CFD 对不同波长下船舶的垂荡及纵摇运动进行模拟,分析了其对波浪增阻的贡献。Young 等[6]采用STAR-CCM+以表面效应船上的喷水推进器为对象,研究了流动不均匀性和空化对转子和定子叶片水弹性响应的影响,结果表明,转子叶片的最大变形大约是转子半径的0.16%,约占间隙尺寸的31.5%。
Delaney 等[7]对某高速喷水推进艇进行了“艇体+泵”数值计算,研究了艇体对进流的影响,但未考虑自由液面。Duerr和Ellenrieder[8]对结合船体的喷水推进器内部速度场进行了数值模拟,结果表明流场速度不均匀性导致叶片受力分布不均匀。Takanori 等[9]以体积力模型模拟喷水推进泵的作用,用CFD 方法分析了“船+泵”的水动力性能,比较了喷水推进泵装船后船体的阻力变化。此外,国内大量学者针对舰艇自航运动开展了广泛的数值模拟研究。仝博等[10]基于RANS 和VOF 采用切割体网格技术在模型尺度下对某高速三体滑行艇进行数值自航计算,并与试验值进行对比,结果表明,CFD 方法预报阻力性能准确性较高,高速航行时推力减额为负的主要原因是艇首尾压差阻力的降低,通过网格局部加密可以减少艇底非正常水汽分布。张雷等[11]采用压力跃变法,提出了一种通过求解兴波阻力和粘性阻力来计算船舶喷水推进推力的数学模型,与自航结果对比相对误差小于5%,实现了喷水推进船舶推力的快速预报。易文彬等[12]基于雷诺时均方程及VOF 模型,同时考虑船模纵倾角及升沉运动,对三体船模喷水推进自航进行数值模拟,结果表明,在较低航速时三体船有较大的推力减额,航速提高时推力减额变为负值,船模姿态变化是主要原因。
现有研究多针对喷水推进舰艇推力预报及减额分析进行数值计算,而对于喷水推进舰艇艇泵一体化流场变化的分析较少。本文选用T-CRAFT 登陆模型艇作为目标艇,对喷水推进舰艇自航运动进行数值计算研究,对设计航速下“艇泵一体”进行数值自航模拟计算,分析喷水推进泵线性启动过程舰艇的流场演化过程,对比艇拖曳与自航下的阻力与姿态变化,同时对设计航速下喷水推进泵流场进行分析。
1 数值计算方法
1.1 控制方程
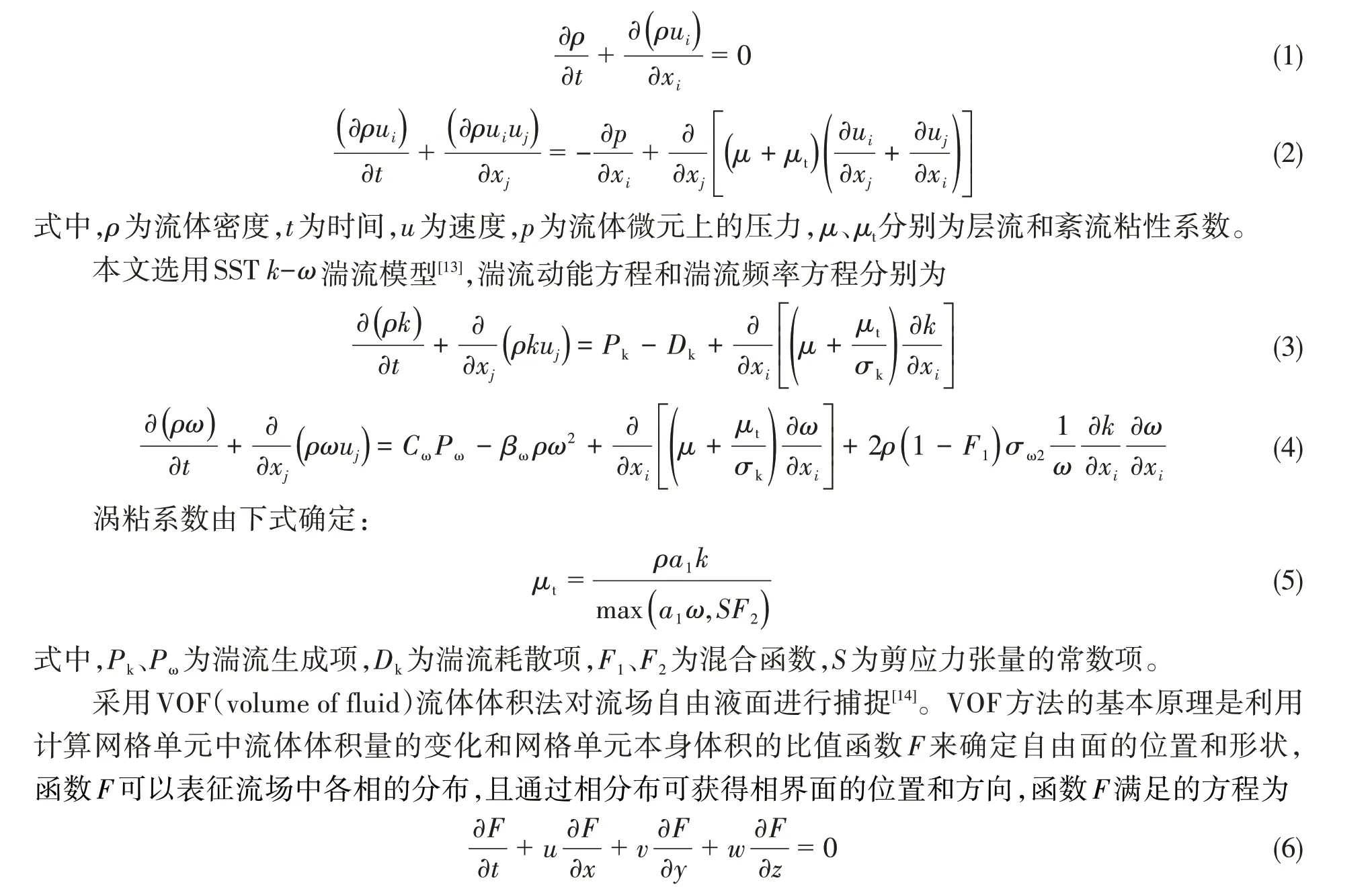
本文采用RANS(Reynolds-Averaged Navier-Stokes)方程进行数值模拟,包括连续性方程和动量方程:
1.2 数值计算模型
本文以T-CRAFT 登陆模型艇为研究对象,其主要特点是在公海海域能够以双体船模式航行,在近海海域能够变成一艘单体船,具有速度快、稳定性佳和适航性好等优势。图1给出了T-CRAFT登陆艇的几何模型,模型艇长为2.53 m,宽为0.74 m,排水量为55.1 kg,艇尾配置双喷水推进器。图2 给出了喷水推进器模型,表1给出了模型艇参数[15]。

图1 T-CRAFT登陆艇模型示意图Fig.1 Schematic diagram of T-CRAFT landing craft model

图2 喷水推进器模型Fig.2 Water jet propeller model
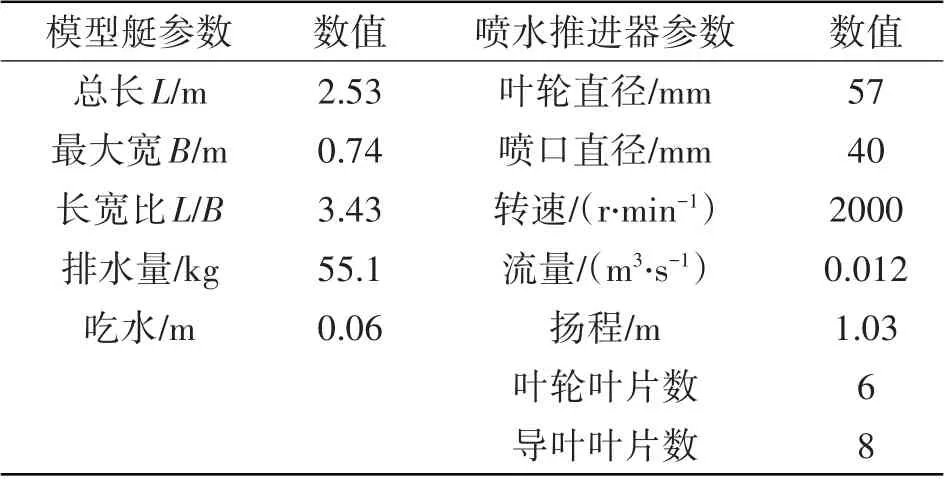
表1 模型艇与喷水推进器参数Tab.1 Parameters of model craft and waterjet
由于艇体左右对称,为减小计算量同时不影响精度,建立半艇体计算域,如图3 所示,其中L为艇长,参照前人的研究成果[16],计算域入口边界取艇艏向前延伸1 倍船长处,出口边界取艇艉向后延伸3倍船长处,计算域长度为5L,宽度为1.5L,高为2L。入口设置为速度入口,速度成分定义为VOF波场函数,使空气和水以波面分为上下两部分通入,出口设置为压力出口。中纵剖面采用对称面边界条件,顶面、下面和前面边界定义为开放边界,船体表面定义为壁面边界。

图3 计算域示意图Fig.3 Schematic diagram of the computational domain
图4给出了网格示意图,模型表面生成三角化良好的面网格,以面网格为基础生成含棱柱层网格和切割体网格的体网格,并对自由液面、船体周围及喷水推进器等区域的网格进行局部加密,其中,艇体和喷水推进器流道表面附近采用棱柱层网格以精确捕捉近壁面流动,棱柱层总厚度为8 mm,层数为5层。本文计算采用瞬态分离隐式求解,考虑计算资源限制和计算效率,时间步长设置为0.01 s,计算总时间为40 s。
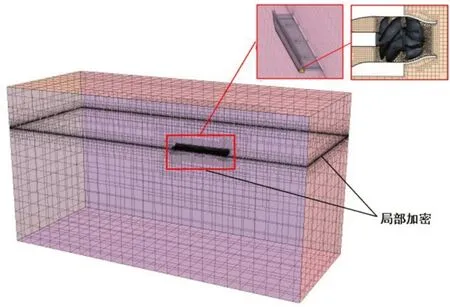
图4 网格示意图Fig.4 Schematic diagram of grid
为保证计算精度和经济性,本文通过艇体阻力来进行网格无关性验证,图5给出了登陆艇在设计航速5.45 kn 下的阻力随网格数量的变化情况,可以看出,网格数在大于410 万时阻力数值趋于稳定,综合考虑计算的经济性和准确性,本文选取的计算域网格数为410万。
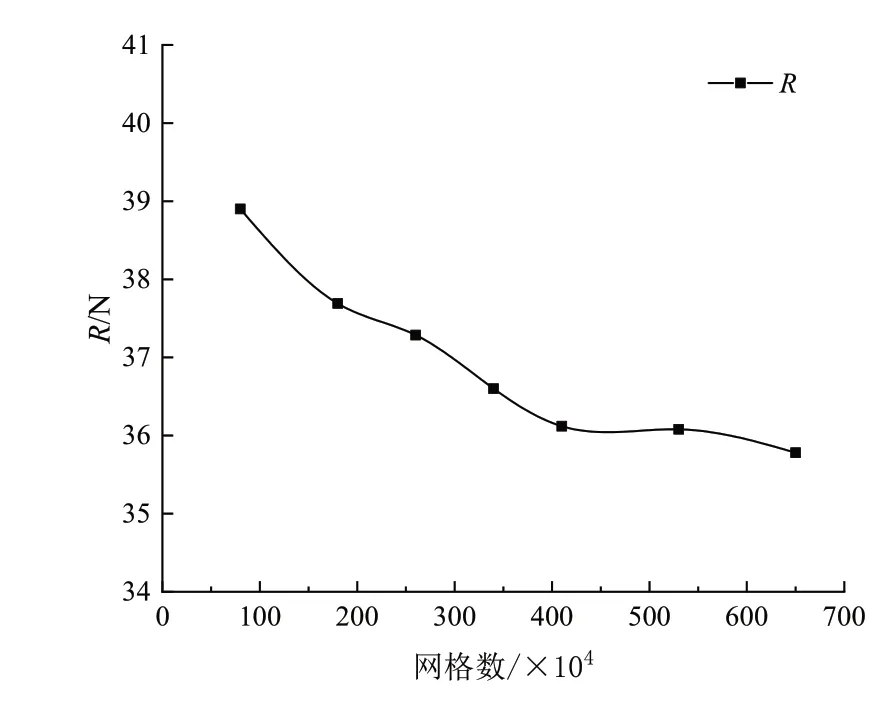
图5 网格无关性验证Fig.5 Grid independence verification
为了验证数值计算方法的准确性,图6 给出了T-CRAFT 登陆艇静水阻力数值模拟结果与试验值[17]的对比,纵倾角以尾倾为正,升沉以上浮为正,可以看出本文的数值结果与试验值吻合良好,证明上述数值计算方法准确度较高。
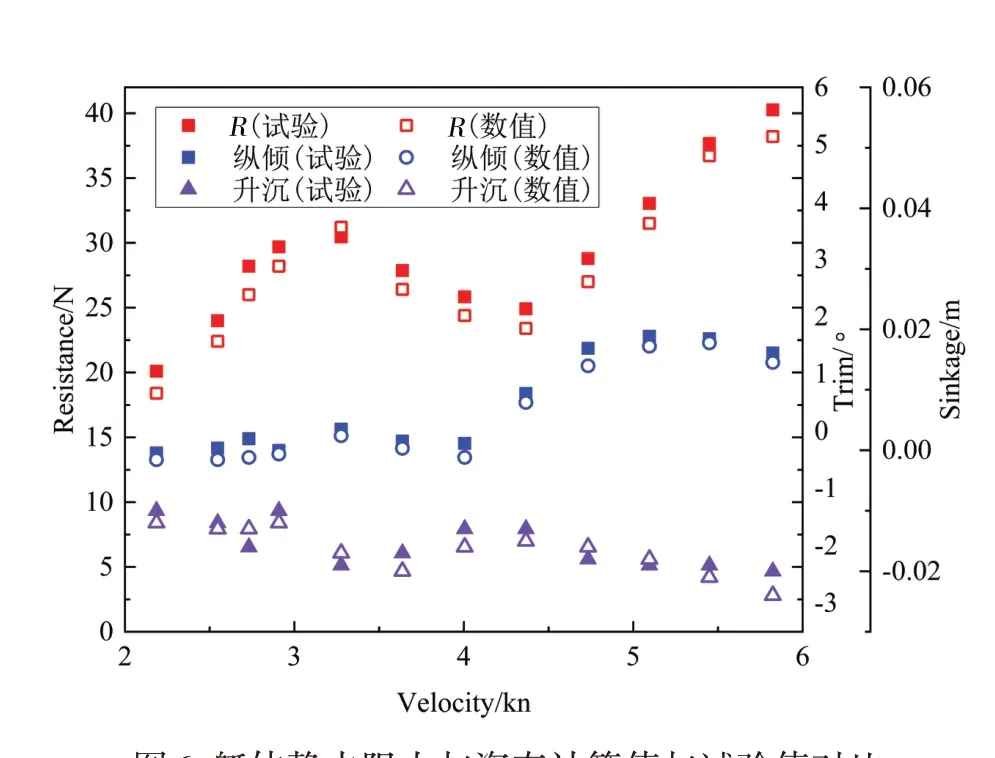
图6 艇体静水阻力与姿态计算值与试验值对比Fig.6 Comparison between numerical and experimental values of hull calm water resistance and attitude
图7 给出了T-CRAFT 登陆模型艇航速为5.45 kn 时数值计算结果与试验结果[15]的波形对比,由图可知,数值计算结果与试验结果波形基本一致,吻合良好,数值计算对艇艉波形变化剧烈的区域进行了良好的捕捉,波形的精确模拟可为后续结果分析提供坚实支撑。
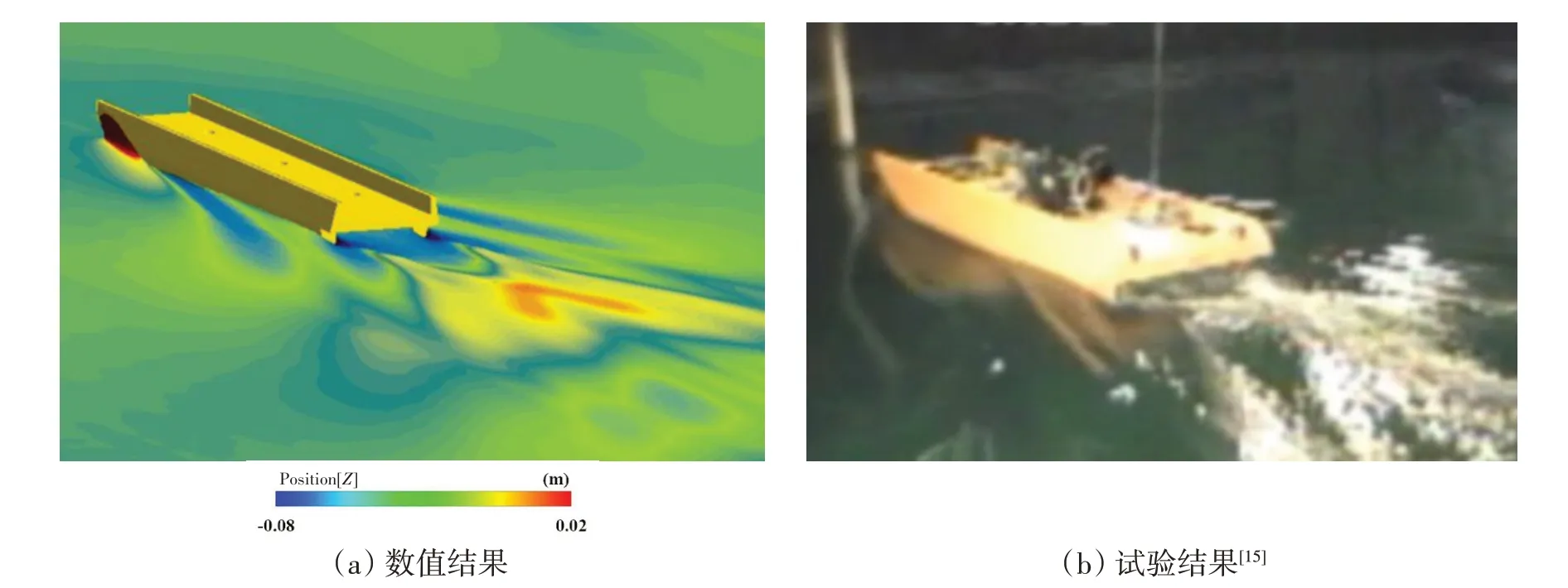
图7 艇尾波形数值结果与试验对比Fig.7 Comparison between numerical results and experimental results of stern wave pattern
图8 给出了喷水推进模型泵在各相对流量工况Qrel下扬程系数H*、功率系数P*和效率η的数值计算结果与试验结果的对比,其中相对流量Qrel、扬程系数H*、功率系数P*和效率η分别为
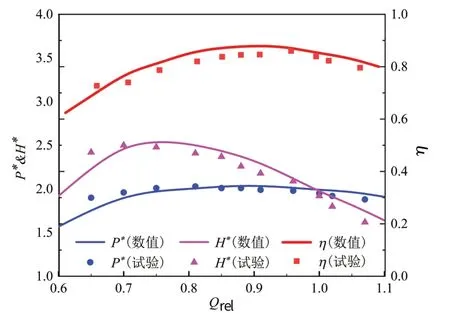
图8 喷水推进泵外特性曲线验证Fig.8 Verification of external characteristic curve of water jet propulsion pump
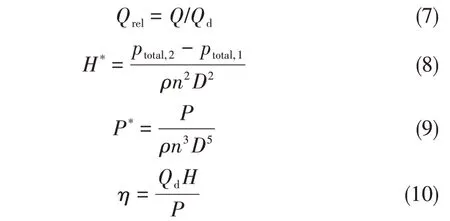
式中,Q为体积流量,Qd为设计流量,ptotal,1、ptotal,2分别为推进泵进口和出口截面的总压,P为推进泵吸收功率。可以看出,扬程系数H*、功率系数P*和效率η数值计算结果与试验结果吻合良好。本文同时验证了静水条件模型艇航行特性、流场演变试验及喷水推进泵外特性。
2 数值计算结果及分析
2.1 舰艇自航运动分析
采用多重参考系(MRF)方法对“艇+泵”进行数值计算,在登陆艇自航运动模拟中研究纵荡、升沉和纵倾三个自由度,喷水推进泵叶轮处设置旋转坐标系来实现转动,初始时刻喷水推进泵转速为0,启动过程转速线性增加,转子转速变化规律为
式中,Tstart为喷水推进泵启动完成时间,取4 s。图9 给出了船体不同时刻波形云图,在1 s 时水面由于艇体运动开始产生兴波,艇尾出现由于喷水推进器射流形成的高波面区;1~4 s过程中,随着喷水推进泵转速提高,艇体周围开始产生兴波现象且波高较小;4 s 喷水推进泵已启动完成,10 s 自由液面产生明显的兴波现象,兴波波高逐渐增加。
为了进一步研究舰艇自航运动的流场特性,选取稳定阶段t=40 s 时刻的全流场进行深入分析。图10(a)给出了自由水面上的波高云图,从图中可以看出艇体艏部喷溅较为明显,艇体位置兴波范围较小,带来的兴波阻力较小。艇尾兴波左右两侧对称均匀,无兴波突变现象,艇尾的凹陷区使喷水推进器的射流迸射入空气中,喷口处的射流有冲击力,艇尾流场在喷水推进器射流与艇体艏部产生的兴波的作用下产生剧烈变化,造成了波高的起伏。表2给出了模型艇拖曳与自航的阻力及姿态对比。与拖曳实验相比可以发现自航时艇体阻力增加,纵倾角增加,吃水增加。自航艇喷水推进器的抽吸作用使得艇底压力降低,导致吃水增加,艇体姿态变化进而影响阻力,且流道的安装减小了船底几何面积,静压阻力增大。图10(b)给出了拖曳与自航艇尾自由液面波形及波高对比,喷水推进器安装后在艇后喷射水流,艇尾波系波高增加,增大了兴波阻力。

表2 拖曳状态与自航状态阻力及姿态对比Tab.2 Resistance comparison between towing state and self propulsion state
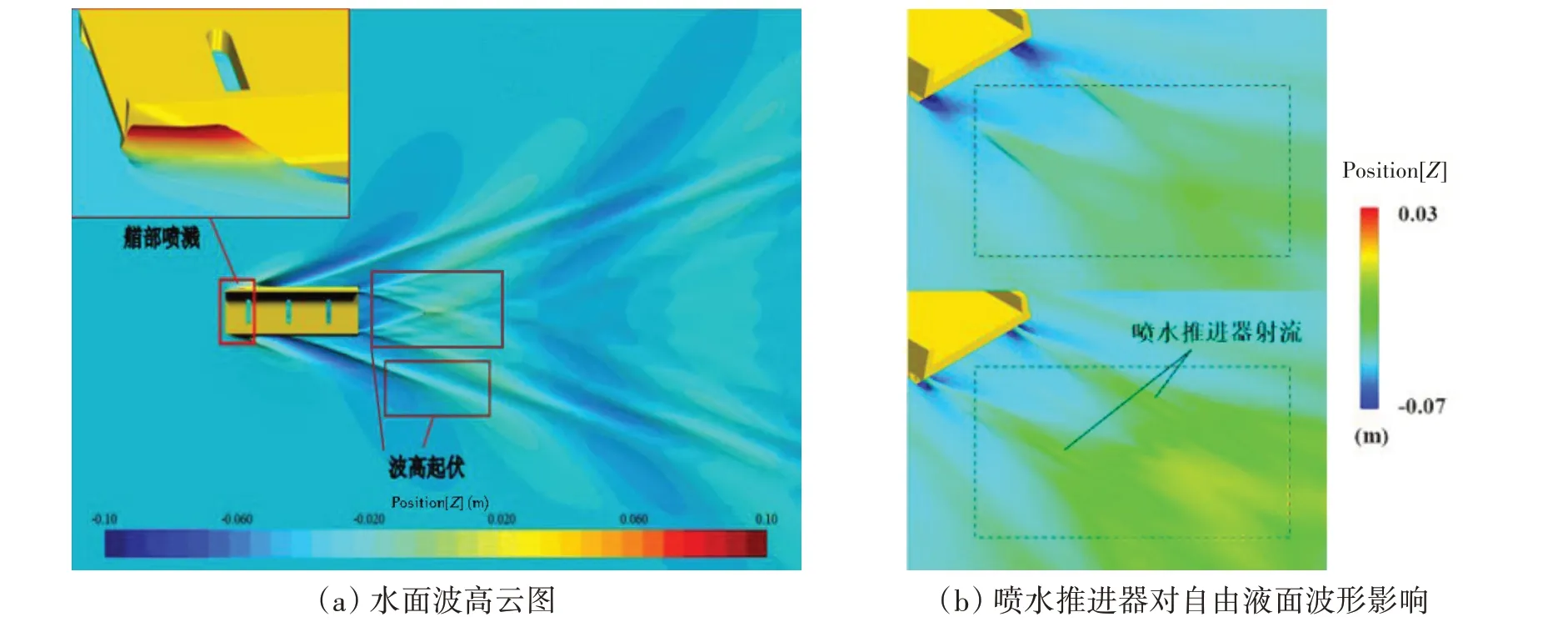
图10 自由水面波形云图Fig.10 Wave height map of free water surface
图11给出了艇体喷水推进器位置截面处的流线图及速度分布图,可以看到水流在进水流道内会改变原先的流动方向,并形成小范围的漩涡以及回流,喷水推进器位置速度分布较为均匀,由流道入口到喷口速度逐渐增大,并在喷口处达到最大。在喷水推进装置喷口上部和艇体之间存在漩涡状的高流速区,漩涡以及回流的产生会降低水流的动能,进而影响艇体的航速和周围流场的速度分布,降低艇尾喷水推进器推力,增加航行阻力,对艇运动产生不利影响。
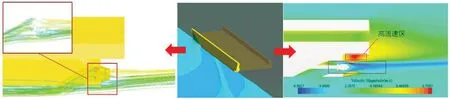
图11 船体截面流线图及速度分布图Fig.11 Velocity distribution and streamline distribution of the hull section
2.2 喷水推进器内部流场特征
选取t=40 s 时的喷水推进器进行内部流场分析,喷水推进器基本参数由表1 给出,为了表征喷水推进泵的工作性能,图12给出了喷水推进泵不同r*圆周截面压力分布,其中叶片径向系数为
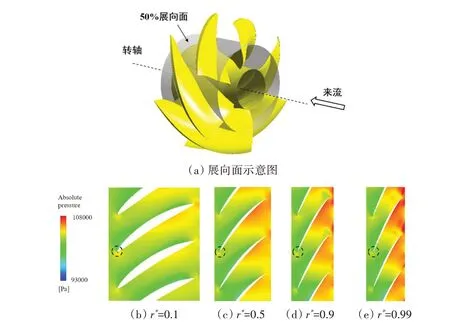
图12 不同叶高位置转子叶片压力分布Fig.12 Pressure distribution of rotor blades at different blade height positions

式中,r为半径,rt为轮缘半径,rh为轮毂半径。
由图可以看出,同一展向面上的不同叶片附近压力分布各不相同,有明显的空间变化,这与图14观察到的现象一致,低压区位于叶片吸力面附近,高压区位于叶片压力面靠近出口位置。水流冲击叶片进口边,速度降低,造成该处压力升高,叶片进口处出现了小部分的相对高压区(虚线圆框区域),随着径向系数增加,低压区逐渐扩大,由此推测叶片靠近轮缘位置的进口边是空化易发区。r*=0.99位置处可以看到叶片尾部局部压力增加的现象,这是由于此处已接近轮缘,轮缘部分存在间隙,叶片尾部流动出现脱流所致。
图13 给出了喷水推进泵不同r*圆周截面的叶片载荷变化,叶片载荷是衡量叶轮能量转化的重要指标,横坐标为翼展方向的无量纲数值。由图13可以看出,在叶片进口边附近压力变化较剧烈,这是由于来流冲击叶片进口边导致压力分布不均匀造成的,与图12观察到的现象一致。叶片吸力面压力逐渐增加,靠近叶片出口增加较快,压力面压力呈现先增加后减小的趋势,靠近叶片出口压力急剧减小。除靠近轮毂区域外,叶片载荷在不同r*下的变化规律基本一致,从叶片进口边到叶片出口边,叶片载荷先增大后减小,总体变化平缓。叶片载荷的峰值点均位于叶轮中间位置附近,说明叶片中部做功能力较强,在中间流线相对位置0.6~0.8处载荷较大,说明相比前半段叶片,后半段做功能力更强,0.8~1.0 处叶片载荷不断降低,这是由于受到叶轮导叶动静干涉影响,在过渡区水流形成旋涡,影响了能量转化。在r*=0.99 位置处可以看到叶片尾部压力急剧增加,这与图12 观察到的现象一致。
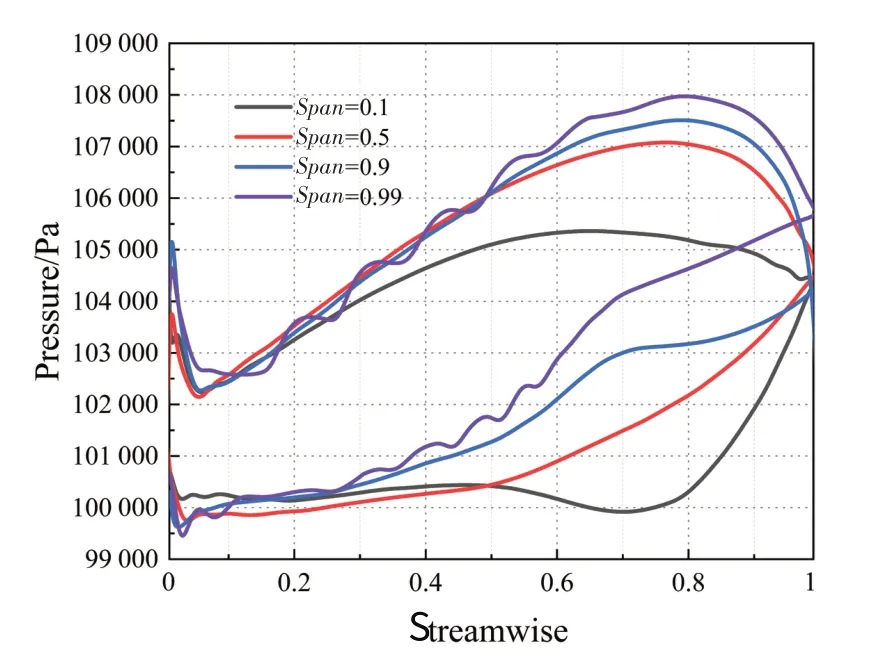
图13 喷水推进泵转子载荷变化Fig.13 Changes in rotor load of water jet pump
为了定量分析喷水推进器内不同截面流场变化情况,选取速度不均匀系数ξ和速度加权平均角θ作为参考,定义如下:
式中,Q为喷水推进器出口的体积流量,uα为流道截面轴向速度,ut为流道截面周向速度,A为流道出口截面面积,u1为截面内点的速度,为截面平均速度。其中速度不均匀系数ξ越小,速度加权平均角θ越接近90°,说明流道的流动性能越好。
图14 给出了喷水推进器转子入口处(S1)、转子定子交界面(S2)处、定子出口(S3)处和喷口(S4)处的截面速度分布以及不同截面内的速度不均匀系数ξ和速度加权平均角θ。可以看到水流在转子入口处呈现出明显的空间变化,这是由于六个转子叶片与旋转轴的相互作用。在转子定子交界面处,由于转子叶片与轴的旋转而产生的切向速度较大,且六个转子叶片的尾流清晰可见。当水流离开喷口时,水流的切向速度分量较小,这是由于在经过导叶后水流环量消除,水流从转子入口流至喷口的过程中轴向速度逐渐增加。由图14(e)可以看出,水流在各界面都呈现出一定的不均匀性,从流道流至喷口(截面S1至截面S4)不均匀性逐渐减小,在喷口处呈现较均匀状态。

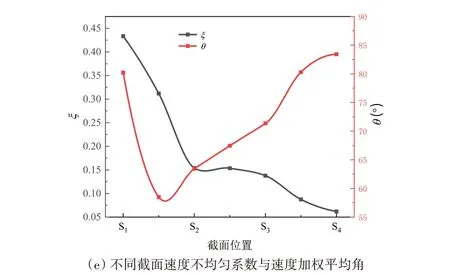
图14 喷水推进器各截面速度分布Fig.14 Velocity distribution map of waterjet propulsor section
为了研究艇体对喷水推进器性能的影响,表3 给出了相同转速下敞水喷水推进泵与装艇喷水推进泵性能的对比,其中ξ、θ分别为喷水推进泵进口处截面的速度不均匀系数与速度加权平均角。由表可知,装艇后喷水推进泵的扬程和速度不均匀系数增加,流量与效率和速度加权平均角均减小,主要原因是受艇体边界层的影响,使得喷水推进器进口处流速与不均匀度降低,这与图14(a)观察到的现象一致,从而导致流量与效率降低,速度不均匀系数增加。

表3 喷水推进器装艇前与装艇后性能参数Tab.3 Performance parameters of waterjet before and after loading
3 结 论
本文以T-CRAFT 登陆艇为研究对象,对该喷水推进舰艇的自航运动进行数值模拟计算,分析艇泵一体化流场特性与演变过程,对比分析了登陆艇拖曳与自航下的阻力与姿态变化,对喷水推进器内部流场进行了分析,得到以下结论:
(1)对喷水推进舰艇自航运动进行了数值模拟计算,将计算结果与试验结果进行对比,验证了采用的数值计算方法具有较高的计算精度。
(2)对喷水推进舰艇设计航速下自航运动数值计算发现:艇体位置波高均匀,兴波范围较小,艇体流线和喷口处流线整体均匀,在转子处存在微小漩涡,会增加艇体阻力;通过模型艇拖曳与自航阻力和姿态对比分析发现,喷水推进器安装后艇体阻力增加,纵倾角增加,吃水增加,艇自航时艇尾波高增加。
(3)对喷水推进泵进行分析后发现,水流从转子入口流至喷口的过程中速度逐渐增加,不均匀性逐渐减小,速度不均匀系数降低86%,速度加权平均角增加61.9%,在喷口处呈现较均匀状态。叶片载荷在不同r*下的变化规律基本一致,叶片中部做功能力较强。对喷水推进泵装艇前后的性能参数对比后发现,艇体边界层的作用使得喷水推进器进口处流速与不均匀度降低,装艇后喷水推进器流量与效率均降低。
