机器人辅助空心钉内固定技术治疗股骨颈骨折的临床观察
2022-08-17区文欢廖志鹏
区文欢,黄 黎,刘 彦,康 乐,廖志鹏
广东省江门市五邑中医院骨二科,广东 江门 529000
股骨颈骨折是临床上常见的、多发于老年人的骨质疏松性骨折类型,占全身骨折的3.6%[1]。随着人口老龄化加剧,髋部骨折发生率明显上升,尤其是股骨颈骨折,预计到2040年全球每年新发患者数将达到50~60万例次[2]。21世纪医学科学进入了微创智能时代,骨科手术技术也在不断革新,患者对精准、微创治疗需求日趋迫切。由于传统骨科手术方式容易受到包括患者体位定位、手术器械操控的精准度及医师临床经验和疲劳程度影响,增加了完成精准手术规划的难度,使手术成功率及可靠性降低[3]。本研究回顾性分析2018年10月—2020年9月江门市五邑中医院骨科行机器人辅助空心钉内固定治疗股骨颈骨折患者资料,并与同期采用传统徒手空心钉内固定术治疗的患者进行比较,探讨导航机器人辅助进行股骨颈骨折空心钉内固定手术的临床疗效。
临床资料
1一般资料纳入标准:(1)年龄≤70岁;(2)经X线片诊断为闭合性新鲜股骨颈骨折;(3)治疗方式选择股骨颈骨折闭合复位空心钉内固定术。 排除标准:(1)经CT或MRI诊断为病理性股骨颈骨折;(2)伴有严重冠心病、脑梗死或肿瘤;(3)伴有精神心理疾病;(4)行关节置换;(5)髋部结核、肿瘤等病变。
根据纳入和排除标准,按照患者性别、年龄、骨折分型的对应关系进行配对入组。机器人手术组21例,男性11例,女性10例;年龄62~70岁,平均63.5岁。致伤原因:道路交通伤5例,高处坠落伤5例,摔伤11例。骨折 Garden 分型:Ⅰ型9例,Ⅱ型7例,Ⅲ型2例,Ⅳ型3例。传统手术组21例,男性12例,女性9例;年龄55~70岁,平均64.5岁。致伤原因:道路交通伤6例,高处坠落伤7例,摔伤8例。骨折Garden分型:Ⅰ型6例,Ⅱ型8例,Ⅲ型5例,Ⅳ型2例。两组患者一般资料比较差异均无统计学意义(P>0.05)。本研究通过笔者医院医学伦理委员会审批(2020YLB023),患者及家属均知情同意。
2手术方法手术操作均由同一位主刀医师完成,机器人手术组采用笔者医院引进的骨科手术机器人(北京天智航医疗器械有限公司生产的天玑系列)。患者仰卧固定于骨科专业手术牵引床,健侧屈髋屈膝外展。透视下患肢外展内旋手法复位骨折端,确保阳性支撑(股骨颈骨折远端完全托住骨折近端),杜绝阴性支撑(股骨颈骨折远端没有完全托住骨折近端)。
机器人手术组:将机器人置于患肢一侧,并进行初步定位,示踪器固定于患侧髂前上棘,调整标尺至恰当位置,操纵C型臂X线机拍摄包含完整股骨头、颈及标尺上 8 个定位点在内的股骨颈正、侧位图像。第二次确认放置的机器人机械臂位置准确,如果其机械臂上的标记位置在计算机显示符合预期,此时机器人的机械臂位置可以固定,再次C型臂X线机透视标准患髋正侧位图像,采集到骨科机器人主机控制系统进行手术规划。在主机显示屏可见标准的倒品字形空心螺钉布局,测算置入的3枚空心螺钉的长度数值。然后计算机系统选择第1枚导针,操控机器人机械臂定位至该位置,术者将导针套筒卡入定位卡槽,沿套筒定位于术区皮肤,插入套筒使尖端顶至股骨外侧骨面。C型臂X线机正、侧位透视明确套筒位置和方向,无误后钻入导针。如发现套筒位置有偏差,可通过计算机系统微调,余下导针同理置入,依次置入空心螺钉。
传统手术组:与机器人手术组复位方法一样,经反复透视确认骨折断端在正位和侧位对位对线良好后,徒手触及股骨大转子顶点,依次钻入3枚平行的倒品字形导针,经透视下见髋关节标准正侧位位置满意后进行钻孔、扩髓,并依次沿3枚克氏针方向拧入空心钉固定骨折。
3观察指标记录两组术中透视时间和次数、导针钻孔次数、平均费用,术后导出术中股骨颈骨折置钉后正侧位片,根据Liebergall等[4]提出的计算方法测算螺钉间的相互平行度,具体方法:利用Image-proplus 6.0软件测量3枚螺钉与股骨干轴线之夹角β1、β2、β3,螺钉间相互平行度(|β1-β2|+|β1-β3|+|β2-β3|)/3。正侧位片3枚螺钉与股骨颈颈干角、前倾角偏离角度即螺钉的轴线与股骨颈轴心线之间的夹角(图1)。术后门诊随访,1、3个月复查1次X线片,然后6个月复查1次,末次随访时采用髋关节功能评分系统[5]评价患髋功能。
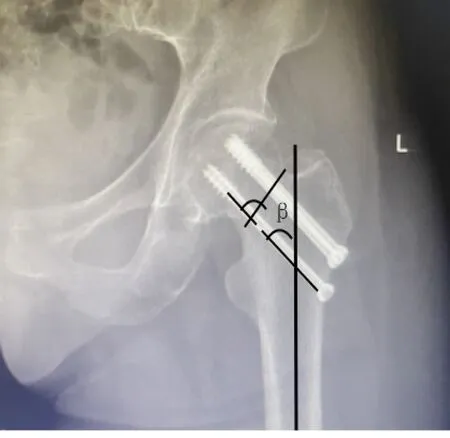
图1 测量股骨纵轴与空心螺钉纵轴之间形成的角度

5结果两组术中透视时间和次数、导针钻孔次数比较差异有统计学意义(P<0.05)。末次随访时,Harris评分两组间比较差异无统计学意义(P>0.05)。两组费用比较差异有统计学意义(P<0.05)。见表1。两组患者在X线片的螺钉平行度、与颈干角、前倾角的偏离角度差异有统计学意义(P<0.05)。见表2。机器人手术组患者C型臂透视时间和手术时间短,术中C型臂投照次数少,一次性置钉准确率高;机器人手术组的空心钉之间以及空心钉与股骨颈轴线之间更接近平行。典型病例见图2、3。

表1 两组患者临床资料比较
表2 两组正侧位X线平行度,前倾角、颈干角偏离角度比较


图2 患者女性,65岁,道路交通伤致左股骨颈骨折,骨科机器人导航下手术。a.术前股骨颈骨折X 线片;b.术中机器人导航下克氏针定位;c.术后术后3个月X线片;d.术后6个月X线片
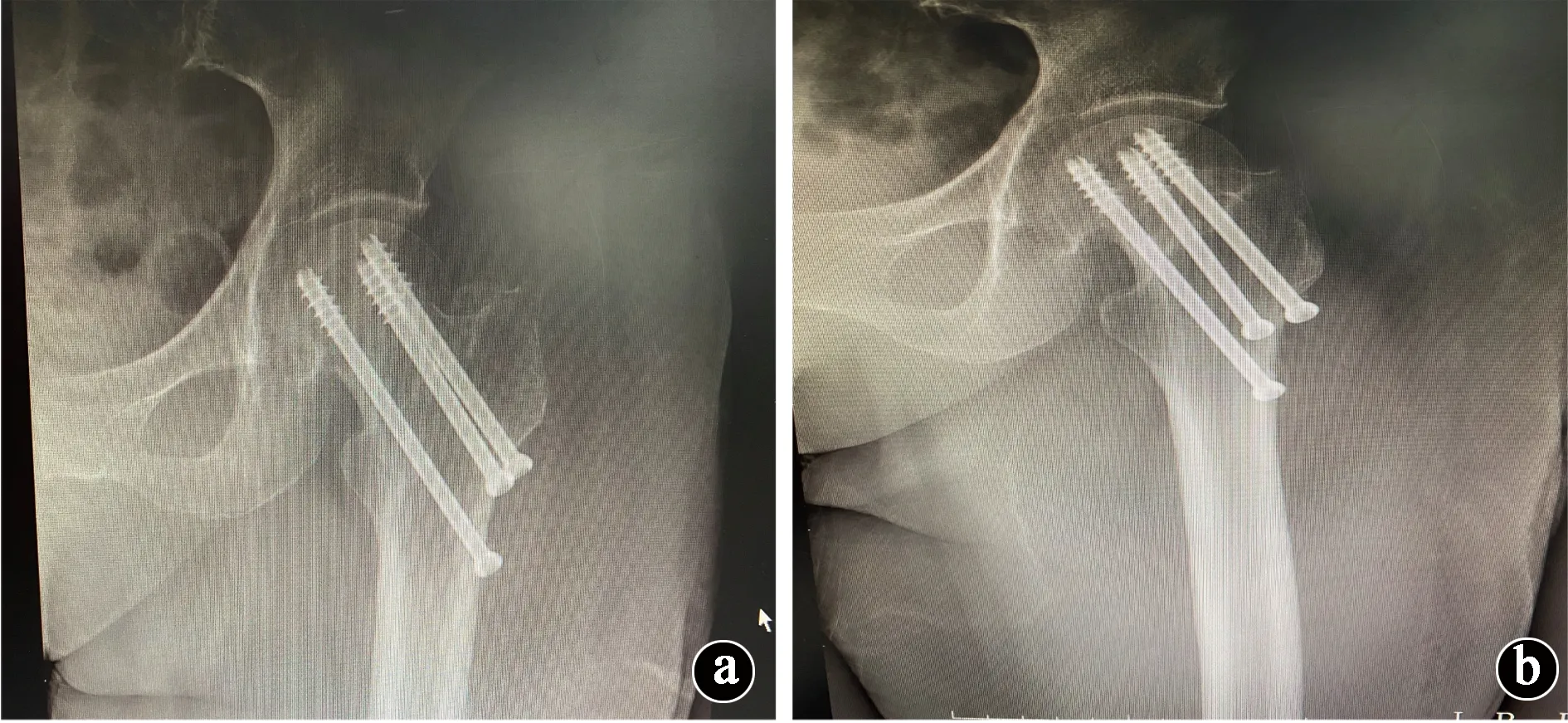
图3 患者男性,60岁,摔伤致右股骨颈骨折,徒手置钉手术。a.术后正位X线片;b.术后侧位X线片
讨 论
股骨颈骨折是髋部最常见的骨折,由于股骨颈周围有旋股内、外侧动脉环绕,骨折后容易导致股骨头缺血性坏死,临床上股骨颈骨折仍以内固定、关节置换等手术治疗为主,由此可以避免相关并发症发生如长期卧床导致的压疮、肺部感染、骨折畸形愈合等。对于没有移位GardenⅠ型、Ⅱ型股骨颈骨折及年龄≤60岁的股骨颈骨折患者,目前主流内固定方式选择空心钉内固定术,已成为临床医师的共识[6]。在选择进行股骨颈骨折空心钉内固定时通过X线机透视下医师徒手操作,需要医师反复调整导针的位置,而股骨颈的空间较局限,由于多次钻孔调整,容易导致局部骨量丢失,最终影响螺钉固定的强度。这一过程中,不仅手术时间延长,而且增加了医护人员放射线辐射量,最终导致空心钉位置精准度下降。机器人辅助技术虽然增加了术前的步骤,但并没有延长总手术时间,原因在于机器人辅助技术避免了反复钻孔和透视次数,从而减少了传统手术的重复步骤,术中透视时间减少,减少X线辐射对医师和患者的损害。本研究中机器人组导针钻孔次数(9.8±1.2)次明显少于传统手术组(18.9±1.5)次,另外通过术后计算机测量空心螺钉在颈干角和前倾角的偏离角度,机器人组测量数值低于传统手术组,这两个角度数值越小,空心钉之间的平行性越好,可获得更好的支撑,有利于骨折愈合。许新忠等和Zwingmann等[7-8]研究发现,通过机器人导航辅助技术术中的修正率为 0.8%~1.3%,错位率为0.1%~1.3%,而传统手术经皮徒手螺钉植入修正率为2.7%,错位率为2.6%;机器人辅助技术能够降低股骨颈骨折空心钉植入过程中钉道修正的发生率,从而实现提高手术操作精确度。
与传统手术相反,机器人辅助技术通过机械臂操作代替术者徒手操作,手术操作的精准性得到提升[9]。机器人导航技术的合理应用不仅实现了手术操作的稳定性,而且可以提供三维立体空间的手术视野,有效提高了手术成功率[10]。Duan等[11]报道与传统手术组相比,机器人组的透视使用更少,术中出血更少,总钻孔更少。与常规手术组相比,螺钉平行度显著提高,颈宽覆盖范围显著扩大。Wang等[12]的大样本研究认为机器人组一次性置钉的成功率达到100%,是传统手术组的2.03倍。骨科机器人通过提供计算机手术规划、微创精准定位、手术路径导航等功能,为临床医师进行股骨颈骨折空心钉置入判断决策和操作提供保障,而且置入螺钉的分散度好。但本研究随访时间短,对于远期股骨头坏死、骨折愈合率等方面,还需在今后的研究中进一步观察随访。
作者贡献声明 :区文欢:研究设计、资料收集、文章撰写与修改;黄黎:文章撰写、病例收集整理、研究设计;刘彦、康乐、廖志鹏:病例整理、统计分析、病例随访