基于模糊聚类和专家评分机制的无人机多层次模块划分方法
2022-08-17杨建峰肖和业白俊强董维浩
杨建峰, 肖和业, 李 亮, 白俊强,*, 董维浩
(1. 西北工业大学航空学院, 陕西 西安 710072; 2. 中国人民解放军95889部队, 甘肃 酒泉 735018)3. 西北工业大学无人系统技术研究院, 陕西 西安 710072)
0 引 言
随着“蜂群”概念的兴起,无人机集群因其潜在的巨大应用价值得到快速发展,由此带来模块化无人机的关注度也越来越高。模块化无人机通过模块拆解、更换等方式实现了其功能与多样化任务需求的精确匹配,不仅减少了设计、制造成本,还缩短了无人机制造周期和战时维修时间,模块化是无人机未来发展的重点方向。Herbert和Alexander最先讨论了模块化思想,经过学者研究拓展,模块化思想得以发展。无人机模块划分方法是面向任务构造合理、可重构的模块化构型的理论基石,是诠释无人机各模块选择及形成机制的重要手段,随着模块化无人机不断发展,其重要性不言而喻。目前,模块化无人机设计理论和方法侧重于概念设计层面,例如,Rinauto等结合离线可重构无人机概念提出一种基于对象的无人机模块化设计框架;李春鹏等从气动设计角度入手研究了无人机模块化布局方法。现有模块化无人机偏向于经验设计,尚无一种模块划分方法可有效地指导模块化无人机设计,例如,华厚强通过优选零部件并结合实验测试设计出一种模块化低空长航时无人机,需要模块化划分方法促使无人机模块化设计由依赖经验指导向理论化的系统设计转变。这一问题不仅来源于模块化无人机任务需求的多样化及零部件的复杂性,还由于无人机模块划分评价指标缺少专业性评价。为此,本文面向无人机任务需求,结合其构成特点,基于“模糊聚类+智能算法”相结合的模块划分方法,引入基于划分指标的专家评分机制,构建了新的模块划分流程,探索一种契合无人机特点的模块划分方法,用于指导无人机零部件聚类,不仅为无人机模块划分提供了新的理论方法,还在设计层面上确保模块化无人机的实用性和合理性。
本文首先以功能、结构、电气和保障等4个方面相关性为基础,构造无人机主要零部件综合相关性矩阵,以此作为输入,基于层次分析的模糊聚类(hierarchical fuzzy clustering, HFC)算法,形成模块划分备选方案。然后,采用多级模糊综合评价法,邀请无人机领域专家进行评分,从备选方案中筛选出最佳方案。结合模糊C均值聚类算法、改进粒子优化群算法各自优势,基于模糊C均值聚类的改进粒子群优化算法(improved particle swarm optimization based on fuzzy C-means, IPSO-FCM),得到最优的模块划分结果,最终形成适合无人机的多层次模块划分方法。最后,本文分别以一次性使用无人机、可重复使用无人机为例,进行零部件模块划分,验证提出的无人机模块划分方法的有效性和合理性。
1 无人机模块划分方法
本文将从构建关联矩阵、模块初步划分、模糊综合评价、模块精准划分等4个方面阐述无人机模块划分方法。划分流程为:
(1) 构建关联矩阵。针对无人机功能要求,机械、电气构造特点,使用与贮存需求,建立功能、结构、电气、保障等4类相关性子矩阵,结合不同模式无人机特点,通过加权计算,构造具有无人机特性的综合相关性矩阵;
(2) 模块初步划分。采用HFC聚类方法,以综合相关性矩阵为输入,通过传递闭包法,获得模糊等价矩阵,按照阈值进行聚类,绘制聚类树状图,获得模块划分备选方案;
(3) 模糊综合评价。以备选方案作为待评价集,构造无人机模块划分评价指标网络层次结构模型并建立评判因素集,在模块划分指标评价体系中引入专家评分机制,构建无人机各级指标权重集,通过多级模糊综合评价,在模块划分初步方案集中获得最佳备选方案;
(4) 模块精准划分。基于改进的粒子群优化算法代替模糊C均值聚类算法中原有的迭代逻辑,并构建迭代框架,其适应度函数采用模糊C均值聚类算法中的FCM函数,以最佳备选方案为变量中心,通过模糊C均值聚类法与改进的粒子群算法相融合的算法,获得最佳模块划分方案。
模块划分具体流程如图1所示。

图1 无人机模块划分流程Fig.1 Unmanned aerial vehicle module partition process
1.1 无人机相关性矩阵内涵及定义
1.1.1 关联因子定义
无人机属于复杂的机电类产品,对其进行关联因子定义,借鉴现有研究中对机电类产品的功能、结构、电气关联因子的定义及赋值范围,同时考虑无人机多种任务特点及在贮存、测试、维修等环节都有特殊要求,在原有功能、结构、电气等关联因子基础上增加了保障关联因子。因此,将无人机的关联因子分为功能、结构、电气、保障等4类,其定义如表1所示,其中,∂(,)、∂(,)、∂(,)、∂(,)分别表示零部件和零部件之间的功能、结构、电气和保障相关性。

表1 无人机模块关联因子
112 综合相关性矩阵
本文采用层次分析法确定各关联因子的权重,评分标准如表2所示。
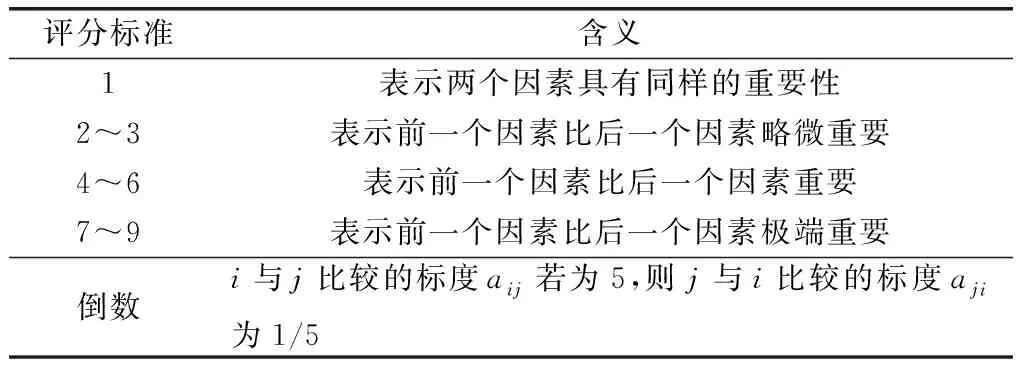
表2 评分标准
基于上述4类关联因子对应的子相关性矩阵,结合各自的权重系数,可得综合相关性矩阵:
={}×
=*∂(,)+*∂(,)+*∂(,)+*∂(,)
式中:表示零部件与零部件之间的综合相关系数;、、、分别表示功能、结构、电气、保障等相关性权重系数。
1.2 基于HFC算法的模块初步划分方法
基于无人机零部件集合,使用传递闭包法,将综合相关性矩阵改造成模糊等价矩阵,以为对象,采用HFC算法,获得不同阈值对应的划分方案,按照阈值由大到小的顺序,依次求得对应的划分方案并进行综合,形成随阈值变化的聚类树状图。

1.3 基于专家评分机制的模糊综合评价
Zadeh等提出了模糊综合评价法,用于分析具有模糊现象的问题,无人机模块划分本就具有模糊性,划分的方案孰优孰劣没有绝对的判定准则。因此,采用模糊综合评价法,可以很好地解决这一问题。
首先,建立评估对象集合,即评价集,本文将模块初步划分后的备选方案作为评价集;然后,构建影响评价对象的因素集合,即因素集,本文针对模块划分影响要素的重要程度,构建了3大类重要性指标因素(A层指标),并细化出影响无人机模块划分的9个要素(B层指标);同时,基于评价指标层级,结合各指标的重要程度,采用网络层次分析法,构造指标网络层次结构模型(见图2),建立指标权重集UE;最后,进行多级模糊综合评价,构建关联评价矩阵,建立模糊综合决策集SE。
SE=UE∘
则SE中数值最大的对应方案即为最优备选方案。

图2 无人机模块划分评价指标网络层次结构模型Fig.2 Hierarchical structure model of evaluation index network for unmanned aerial vehicle module partition
关联评价矩阵为
其中,为关联系数,计算公式为

式中:表示分辨系数,取值区间为(0,1),通常取=05;et为评价集对因素集的最优参考序列;et为评价集对因素集的比较序列。
模糊综合决策集SE中的元素体现的是对评价集中的划分方案的评价结果,二者一一对应,数值最大的元素对应的划分方案即为最佳的备选方案。
网络层次分析法的关键在于确定各指标之间的间接优势度,得到比较矩阵。为确保客观反映各指标间的权重关系,本文引入了专家评分机制,通过邀请无人机设计领域专家,确保结果的准确性。
为此,制定了《无人机模块划分要素重要性权重评议表》,邀请专家组进行评分:
={,,…,}
其中,为第个专家,且≥3,基于评价指标层次模型,依据表2的标准进行优势度评议,通过评分得到个比较矩阵,进而获得各指标间的加权超矩阵,确定各指标权重。
同时,为降低专家评分的主观因素影响,采用基于专家信度的方法,考虑评分专家的职称、从事专业和从业年限等要素,设置信度评分标准(见表3),采用层次分析法,确定每个影响因素的权重,综合得到个专家的评分质量值(=1,2,…,)。
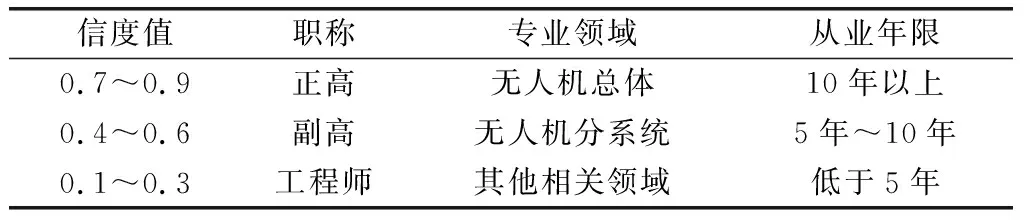
表3 专家评分质量标准
然后,计算专家信度系数:
式中:=(,,…,);值越大表示专家的权威性越大,其所占权重越大。因此,专家的评价权重可表示为

则个专家的权重集为
EX=(ex,ex,…,ex)
根据专家(=1,2,…,)的评分,经过计算获得对应的各指标权重:
UE=(ue1,ue2,…,ue)
结合专家权重,得到最终的指标权重集:
UE=(ue,ue,…,ue)
其中,

1.4 基于IPSO-FCM算法的模块精准划分方法
依据第13节得出的最佳备选方案,采用IPSO-FCM算法进行进一步精准划分,确定各模块与无人机零部件之间的对应关系,获得最终的模块划分方案。IPSO-FCM算法以改进的粒子群算法为迭代框架,适应度函数采用FCM价值函数的方式进行寻优,采用“聚类中心→隶属度矩阵→价值函数”的顺序计算粒子适应度。
初始化聚类中心。根据模块粗划分方案和模糊综合评价结果,确定需要划分的模块数以及具体的模块=(,,…,),聚类中心(=1,2,…,)的初值分别从对应的模块(=1,2,…,)中随机选取,组成初始聚类中心矩阵=(,,…,),即粒子的初始位置。

更新隶属度矩阵。隶属度函数表征每个样本属于每个模块的程度,隶属度矩阵可表示为
={}
式中:=1,2,…,;=1,2,…,;表示第个指标样本隶属于第个簇类的隶属度,且有
依据初始化的聚类中心,计算得到初始的隶属度矩阵。


计算价值函数。根据初始隶属度矩阵和初始聚类中心矩阵,计算获得对应的初始价值函数,即为粒子的初始适应度值。

通过IPSO-FCM算法迭代,获得最小的价值函数值()(1≤≤,为最大迭代次数)对应的隶属度矩阵(),依据隶属度大小,将全部样本划分成个模块,即为最终的模块划分方案。
2 无人机模块划分实例验证
在上述模块划分方法的基础上,以一次性使用、可重复使用等两类无人机平台为研究对象,通过实例分析,验证所提方法的合理性和可行性。
2.1 一次性使用无人机平台
211 主要零部件组成
一次性使用无人机平台较为简单,具备可消耗、低成本等特点,多用于集群作战,一般包括机体、飞行控制系统、动力系统、通讯系统、降落系统和载荷等。本文将对该类无人机零部件进行细化,构建初始样本集。一次性使用无人机零部件示意如图3所示,编号对应零部件具体如表4所示。
图3 一次性使用无人机组成示意图Fig.3 Disposable unmanned aerial vehicle composition diagram
表4 一次性使用无人机主要零部件组成表
2.1.2 模块划分
(1) 建立综合相关性矩阵
构建功能、结构、电气、保障等4个子相关性矩阵,经计算,确定其权重分别为0.29,0.30,0.29,0.12。经过加权计算,得到综合相关性矩阵。
(2) 模块初步划分
以综合相关性矩阵作为模糊相似矩阵,通过传递闭包法,将其转换为模糊等价矩阵,并绘制聚类树状图,如图4所示。

图4 一次性使用无人机模块划分聚类树状图Fig.4 Cluster tree diagram of disposable unmanned aerial vehicle module partition
基于理想模块数原则,确定将模块数为4、5、6、7的方案作为备选方案,具体划分方案如图5所示。
图5 一次性使用无人机模块初步划分方案Fig.5 Preliminary partition scheme of disposable unmanned aerial vehicle modules
(3) 模糊综合评价
邀请10名无人机设计领域专家进行评分。经计算,10位专家的评价权重分别为0.100 1、0.094 2、0.133 9、0.159 7、0、0.087 0、0.121 6、0.189 1、0.027 4、0.087 0,即采信除权重为0的专家以外的其余9位专家。经过加权计算,各指标层最终的权重见表5。

表5 各层级指标权重
由于无人机指标层次模型为两级指标,故采用两级模糊综合评价。首先,建立一级模糊综合决策集。

然后,以作为二级模糊综合评价的模糊关系矩阵,参照一级评价的步骤,得到二级模糊综合决策集。

上述结果表明,经过两级模糊综合评价,方案1为最优备选方案,即将无人机零部件划分为7个模块。
(4) 模块精准划分
经过迭代运算,在90步左右收敛到最优解,迭代收敛曲线如图6所示,零部件最终划分方案如图7所示。
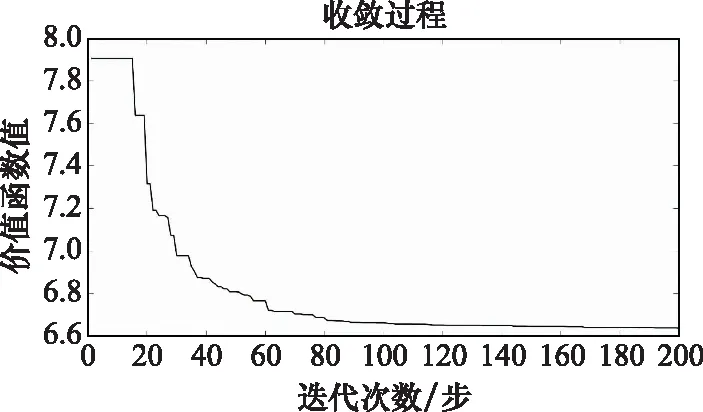
图6 IPSO-FCM算法迭代收敛曲线(一次性使用无人机)Fig.6 Iterative convergence curve of IPSO-FCM algorithm (disposable unmanned aerial vehicle)
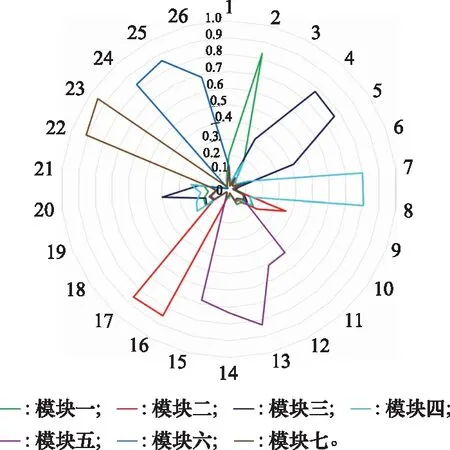
图7 一次性使用无人机零部件最终划分方案Fig.7 Final partition scheme of disposable unmanned aerial vehicle parts
由图7可得,模块精准划分方案如下:模块一(1#机翼、2#机身);模块二(9#总体电机、10#电子调速器、16#桨夹、17#桨叶);模块三(3#主控单元、4# 3轴加速度计、5# 3轴角速度计、6#气压高度计、20# GPS指南针模块);模块四(7#电池、8#电源管理板、18#数据链、19#机载数据链天线、21#导引头);模块五(11#平尾、12#垂尾、13#舵电机、14#可调电位器、15#齿轮传动装置);模块六(24#降落伞、25#伞舱盖、26#弹射装置);模块七(22#引信、23#战斗部)。
对比最优备选方案,区别在于零部件18#、19#、21#从主控单元剥离(模块三),划入电源模块(模块四)中。其中,零部件18#、19#分别为数据链和天线,零部件21#为导引头,均属于无人机中耗电量较大的零部件,相比于主控单元模块,将数据链、天线、导引头与电源组件划分在同一模块更为合理。
2.2 可重复使用无人机平台
可重复使用无人机相较于一次性使用无人机,在功能、结构、电气、保障等相关性方面的侧重点不同,要求回收后经过适当的地面保障后能够迅速恢复执行任务能力,对保障性的要求更高。因此,可重复使用无人机模块划分的情况有所不同。
221 主要零部件组成
由于在航程、机动性、任务多样性等方面的要求,可重复使用无人机在零部件组成上相较于一次性使用无人机更加复杂,可遂行侦察、监视、中继等多样化的作战任务。可重复使用无人机零部件示意如图8所示,编号对应零部件具体如表6所示。
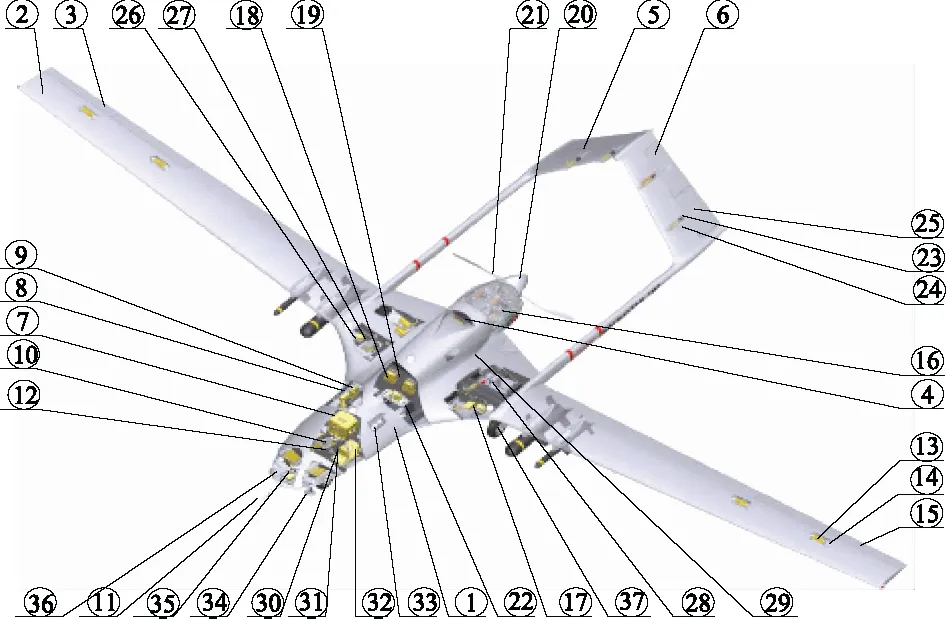
图8 可重复使用无人机组成示意图Fig.8 Schematic diagram of reusable unmanned aerial vehicle composition
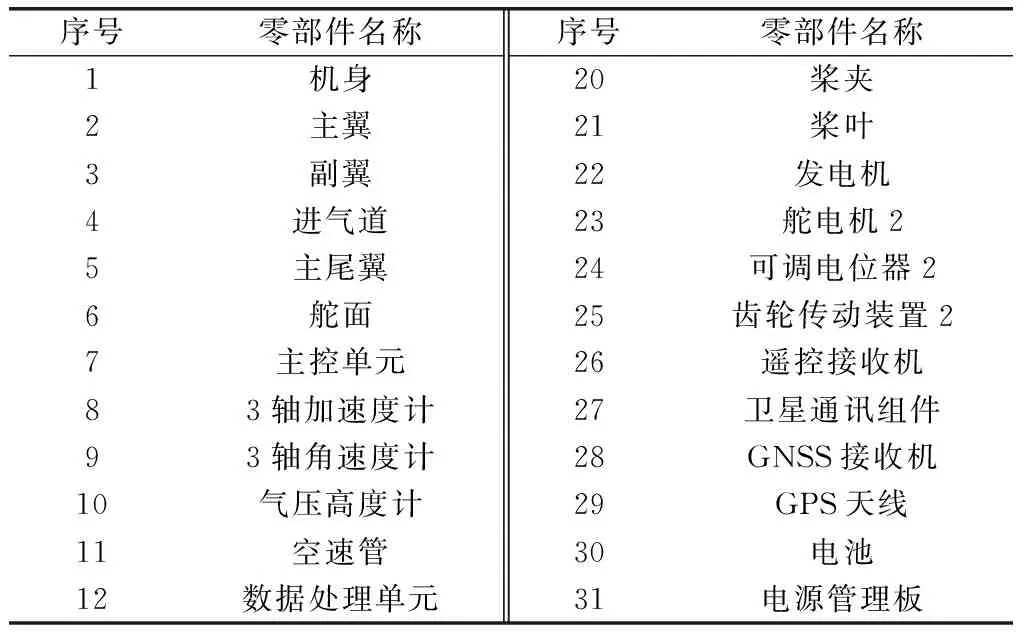
表6 可重复使用无人机主要零部件组成表

续表6
2.2.2 模块划分
(1) 建立综合相关性矩阵
可重复使用无人机强调使用的循环性,因此,保障相关性的权重会有所增加,具体权重为0.19、0.23、0.17、0.41。经过加权计算,得到综合相关性矩阵。
(2) 模块初步划分
参照一次性使用无人机的方法,绘制聚类树状图,如图9所示。

图9 可重复无人机模块划分聚类树状图Fig.9 Cluster tree diagram of repeatable unmanned aerial vehicle module partition
结合理想模块数原则,确定模块数为4、5、6、7、8作为初步划分方案,具体方案如图10所示。

图10 可重复使用无人机模块初步划分方案Fig.10 Preliminary partition scheme of reusable unmanned aerial vehicle modules
(3) 模糊综合评价


可以看出,方案3为最优模块划分方案,即将无人机零部件划分为6个模块最为合理。
(4) 模块精准划分
经过迭代,在70步左右收敛到最优解,迭代收敛曲线如图11所示,零部件最终划分方案如图12所示。
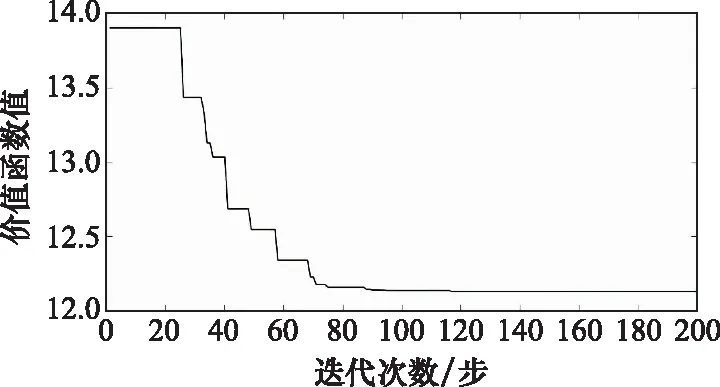
图11 IPSO-FCM算法迭代收敛曲线(可重复使用无人机)Fig.11 Iterative convergence curve of IPSO-FCM algorithm (reusable unmanned aerial vehicle)
图12 可重复无人机零部件最终划分方案Fig.12 Final partition scheme of reproducible unmanned aerial vehicle parts
由图12可得,模块精准划分方案如下:模块一(1#机身、2#主翼、3#副翼、4#进气道、5#主尾翼、13#舵电机1、14#可调电位器1、15#齿轮传动装置1、37#起落架);模块二(6#舵面、23#舵电机2、24#可调电位器2、25#齿轮传动装置2);模块三(7#主控单元、8#3轴加速度计、9#3轴角速度计、10#气压高度计、11#空速管、12#数据处理单元);模块四(16#转子发动机、17#油泵、18#主油箱、19#副油箱、20#桨夹、21#桨叶);模块五(22#发电机、26#遥控接收机、27#卫星通讯组件、28# GNSS接收机、29# GPS天线、30#电池、31#电源管理板、32#数据链端机、33#数据链天线);模块六(34#航拍组件、35# SAR雷达、36#激光测距仪)。
相较于最优备选方案,零部件28#、29#(GNSS接收机、GPS天线)、零部件22#(发电机)均被划分至模块五,将供电系统和遥测通讯设备集成在一个模块,有利于保障此类大耗电量设备的持续供电,提高供电效率。
2.3 对比验证及讨论
对比分析一次性使用、可重复使用无人机的模块划分结果,可发现二者既有相通之处,又存在各自的特色,具体如下:
(1) 电子模块差异
两种类型无人机电子设备集成度不同,对于可重复使用无人机,强调远距离执行任务能力,对通信、导航等电子设备功能需求更高,需要从系统中分离出来,单独形成模块,便于重复使用、维护及保养;而一次性使用无人机受体积限制,且功能需求较低,电子设备更倾向于集成化的配置,整体为一个模块,便于集成化的批量低成本制造,实现可消耗性。
(2) 结构模块差异
为适应重复飞行,将重复使用无人机的机翼、机体、起落架、舵翼等作为一个模块,不进行拆解,以提高整个结构在重复使用中的可靠性;而一次性使用无人机强调可消耗性,结构模块仅包含机身、机翼,垂尾、平尾为另外的模块,以便于无人机快速大批制造、装配,以满足大批量消耗的需求。
(3) 模块个数差异
可重复使用无人机强调可保障性,重复使用带来的是保障难度的加大,较少的模块可以适当降低保障复杂度,提高保障效率;而一次性使用无人机更强调任务单一性和能力再生的时效性,适当地细化模块,可缩短无人机能力重组时间,发挥大规模快速定制优势。
(4) 与现有模块化无人机对比
通过查阅国内外模块化无人机相关文献,分析其模块组成情况,并与本文中一次性使用无人机、可重复使用无人机等实例进行对比表明,本文中两类无人机实例的模块划分结果与现有无人机按经验划分的结果相近,且模块组成更加全面,具体情况如表7所示。

表7 国内外模块化无人机划分结果对比表
通过分析上述两类无人机模块划分结果,并与现有模块化无人机对比,能够体现无人机的基本功能,且突出各自的优势,验证了模块划分方法的合理性和理论可行性。
3 结 论
本文面向无人机任务需求,结合其构成特点,构建了初步划分-综合评价-精准划分的无人机模块划分流程,建立无人机模块划分评价指标网络层次结构模型,引入专家评分机制以提升指标评定可信度,进而提出了一种适用于无人机的模块划分方法。以一次性使用无人机、可重复使用无人机为例,运用本文提出的模块划分方法,构建了综合相关性矩阵,给出了模块划分备选方案,进行了基于专家评分机制的模糊综合评价,以IPSO-FCM算法寻优获得了最终的模块划分方案。通过上述两类无人机模块划分结果的对比分析可知,通过引入专家评分机制,使得评价指标权重更加清晰,提升了所选最佳划分方案的可信度。同时,所划分的模块能够契合无人机的类型及特点,能够更好地发挥无人机优势。由此,模块划分结果的准确性得以验证,也表明了所提出的无人机模块划分方法的合理性和理论可行性。
