三轴转动惯量的直立振复摆与圆周扭摆协同测量方法
2022-08-02卢志辉孙浩智王和杨洪涛武艺泳
卢志辉, 孙浩智, 王和, 杨洪涛, 武艺泳
(郑州机械研究所有限公司, 河南 郑州 450052)
0 引言
3个轴向转动惯量是导弹弹头等空间飞行体重要的物理参数,扭摆法是最常用的测量方法,该方法需要导弹弹头分别以3个正交姿态放置在具有直立轴线的摆动转台上,通过测量圆周扭摆周期并与标准样件的摆动周期进行比对,计算各个转动惯量分量。
多数型号导弹弹头外形呈圆锥状或者类圆锥状,由于导弹弹头自身质量分布特点,其横向转动惯量一般明显大于轴向转动惯量,同时2个横向转动惯量分量数值比较接近。前期被部队定型批产的多个型号测量设备在测量横向惯量分量时,需要在水平工装的弧托或者支撑滚轮上转动90°,不论是人工或自动驱动都会带来操作或机构配置的繁琐,转动过程还有可能造成轴向窜动,影响测量精度,使用部队明确提出希望进行改进的要求。对于带有舵机板的导弹弹头或者非圆形截面的导弹弹头还需要重新吊装翻转,测量过程更为不便。即使配置了空间姿态转动机构,也会使得机构本身更复杂、运动副增多,造成摆动系统刚度降低,工装初始转动惯量增大,对测量精度不利。
上述定型设备采用集成测量机构,在一个转台上实现质量、质心位置、转动惯量、惯性积等多种参数的集成测量,机构利用悬浮刀口和小量程传感器或者平衡板簧组成一个直立刀口振复摆系统,可用于导弹弹头质心横偏高精度测量和惯性积测量,利用扭摆系统测量三轴转动惯量。利用设备直立轴系的自动转动功能,可以对导弹弹头2个方位实施直立刀口振复摆测量。
为了解决导弹弹头横向转动惯量分量测量时弹头水平姿态调整不便的问题,本文利用上述2个系统协同工作,提出导弹弹头直立振复摆与圆周扭摆协同测量的方法,以避免弹头水平状态下的姿态调整工艺步骤。该方法的原理方法可以丰富细分行业测量理论,具体机构具有较好的工程实用价值。基于该机构的新型弹头质量特性测量设备已配用于多个部队和科研院所。机构组成见文献[5]。
1 转动惯量常用测量方法原理
1.1 扭摆法
扭摆法是测量转动惯量常用的方法,国内外对其具体实现结构、测量原理、误差分析等都有大量的研究,对标准件赋值及设备标定等方面都有一定的研究,其结构原理如图1所示,被测物体放置在与扭杆固连的转台上,在外界激励下做圆周扭摆运动。
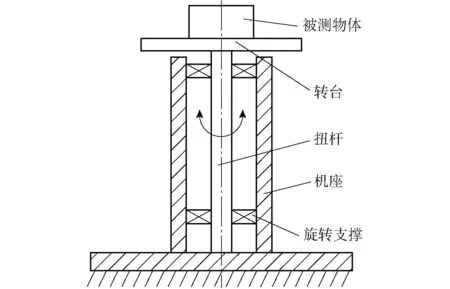
图1 扭摆法示意图Fig.1 Schematic diagram of the circular pendulum method
系统圆周扭摆的运动微分方程为
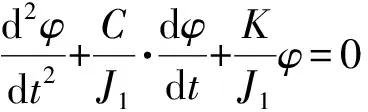
(1)
式中:为扭转角;为扭转阻尼;为转动惯量;为扭转刚度。由(1)式求得
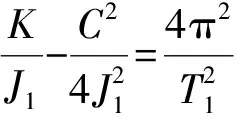
(2)
式中:为扭摆周期。实际测量过程中,摆动系统受到的阻尼可以忽略,从而推导出
(3)
即转动惯量与扭摆周期的平方呈正比。实际测量过程中采用样件比对测量,依次测出转台摆动系统的扭摆周期、标准样件+摆动系统的扭摆周期(标准样件自身转动惯量为)、产品+摆动系统的扭摆周期,就可得出导弹弹头的转动惯量为

(4)
1.2 直立振复摆法
振复摆法同样可以用来测量转动惯量,只是没有扭摆法应用普遍,由于最终惯量值需要移轴处理,该距离数值基数大,其误差引起的测量误差比扭摆法明显要大。文献[14]建立了采用振复摆法直接测量转动惯量的振复摆模型,推导了振复摆的计算公式,其结构原理进一步简化如图2所示。图2中,为被测物体质心到振复摆中心的距离,为板簧到振复摆中心的距离。

图2 直立振复摆法示意图Fig.2 Schematic diagram of the compound pendulum method
空气阻尼忽略不计的情况下,振复摆运动方程为

(5)
式中:为摆动角;为被测物体+摆动系统的相对振复摆中心的总转动惯量;为弹簧刚度系数;为被测物体+摆动系统的总质量;为重力加速度。
由(5)式求得
(6)
式中:为振复摆周期。(6)式是振复摆法测量物体转动惯量的原理公式。同样在实际测量过中可以采用样件比对法,依次测量摆动系统的振复摆周期、标准样件+摆动系统的振复摆周期、导弹弹头+摆动系统的振复摆周期,叠加上移轴因素,求得导弹弹头自身转动惯量,具体计算公式如下:

(7)
式中:为标准样件相对振复摆中心转动惯量;、分别为标准样件和导弹弹头的质量;、分别为标准样件和导弹弹头质心到振复摆中心的距离。
2 协同测量方法的主体结构与实现方法
文献[3]对扭摆法和复摆测量转动惯量的优缺点进行了研究,对比了两种方法的测量结果,并对两种测量方法的不确定度进行了估计和计算。发现两种方法的测量结果吻合较好,并且扭摆法的测量误差比较小。复摆法测量的高不确定度是由测量装置精度因素造成的,而不是由测量原理造成的。
在振复摆法实际计算时,由于设备结构具有一定的复杂性,自身的参数难以精确确定,直接导致、数据精度不高,同时由于导弹弹头轴向质心测量精度相对横向精度误差更大,进一步加剧了的误差,基数大,移轴中由的误差δ引起的测量误差为2··δ,该项将会带来粗大误差。利用圆周扭摆精度高的优势,结合直立刀口振复摆确定2个分量之间的关系,完成2个横向转动惯量的协同测量。综合文献[5]给出的结构以及本文提出的测量原理和推导的计算公式,形成了直立刀口振复摆和圆周扭摆协同测量方法,为三轴转动惯量测量提供了新的思路。
2.1 主体结构
直立刀口振复摆与扭摆法协同测量结构组成如图3所示。图3中示意的是直立工装的使用状态,主要包括主轴、主轴圆盘、刀口结构、中心扭杆、锁紧器、固定销、支臂和板簧。导弹弹头通过直立工装或者水平工装固定在主轴的圆盘上,实现相关直立和水平状态特性参数的测量。主轴悬浮在一组刀口上面,与之垂直方向连接一组支臂,支臂和弹性元件板簧相连,组成直立刀口振复摆系统。测量横向质心时,锁紧器松开、固定销拔出,质心随着主轴转动,支臂则沿刀口摆动,支臂处下方安装有测距传感器,可以测出质心不平衡量引起的偏心位移量,可通过砝码配平,直至偏心位移量为零,即总体质心位于旋转轴线上。固定销插入后,直立刀口复摆运动被固定,主轴下方连接中心扭杆被锁紧器紧固,形成一个圆周复摆系统。利用该结构中的直立刀口复摆系统确定弹头横向转动惯量和的关系,利用结构中的圆周复摆系统测量弹头轴向转动惯量、横向转动惯量或。
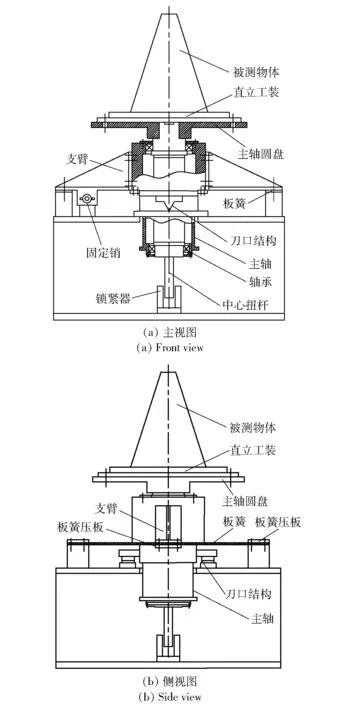
图3 扭摆法和振复摆协同法机构示意图Fig.3 Schematic diagram of the measuring device combing circular pendulum and compound pendulum
2.2 直立振复摆与扭摆法协同测量方法
结合图3,在测量弹头三轴转动惯量(、、)时,一般方法是先把产品固定为直立状态,用扭摆法测出,再水平放置,用扭摆法测出,然后产品水平翻转90°测出。本文提出的直立刀口振复摆与圆周扭摆协同测量方法是弹头在竖直状态下,利用直立刀口振复摆法测出弹头在0°和90°下的摆动周期(弹头轴和轴分别平行于刀口母线,产品直立状态下自动旋转90°,设备摆动系统本身在两个方向的振复摆周期经调整已相等,相当于空盘状态已经平衡),确定相应转动惯量分量和的关系,最后再通过水平扭摆法测出或者,通过相互关系计算出另一个横向转动惯量分量或者。这样如何确定和的关系就成了直立刀口振复摆与圆周扭摆协同测量方法实施的关键所在。
2.3 计算方法
和为导弹弹头+摆动系统沿轴和轴相对于摆动中心的摆动周期。结合(7)式可推导出:

(8)


(9)

(10)
式中:为多个参数的函数。比对(4)式,称为当量样件惯量,会因采用导弹弹头的不同而变化,但是对于设备在测量对象相对固定情况下其数值是稳定的,对其进行标定是可行的,非常适合交付部队的这类专用设备。
3 试验方法与试验验证
3.1 试验方法
如图4所示,2个质量一致的小砝码,按对称位置分别安装在样件上下圆盘上,放置砝码前后样件的质心位置无变化。圆盘上沿4个象限制有精密定位孔,小砝码带有定位销与之配合保障位置精度并用胶水粘接,试验后恢复原状。试验中规定样件横向转动惯量为,样件+砝码的总横向转动惯量为(2个砝码轴线位于摆动轨迹形成的平面),样件和砝码均为外形规则的回转体,和实际值可通过理论计算获知。试验时依次测量摆动系统振复摆周期、样件+摆动系统振复摆周期、样件+砝码1+摆动系统振复摆周期,测量3次,利用3组数据的测量均值标定值。再将样件+砝码2作为导弹弹头进行周期测量,计算得到,通过对比与理论值的一致性,判定该测量方法的测量精度。为验证适用性,试验在3台试验设备上进行,以下称为设备1、设备2和设备3。
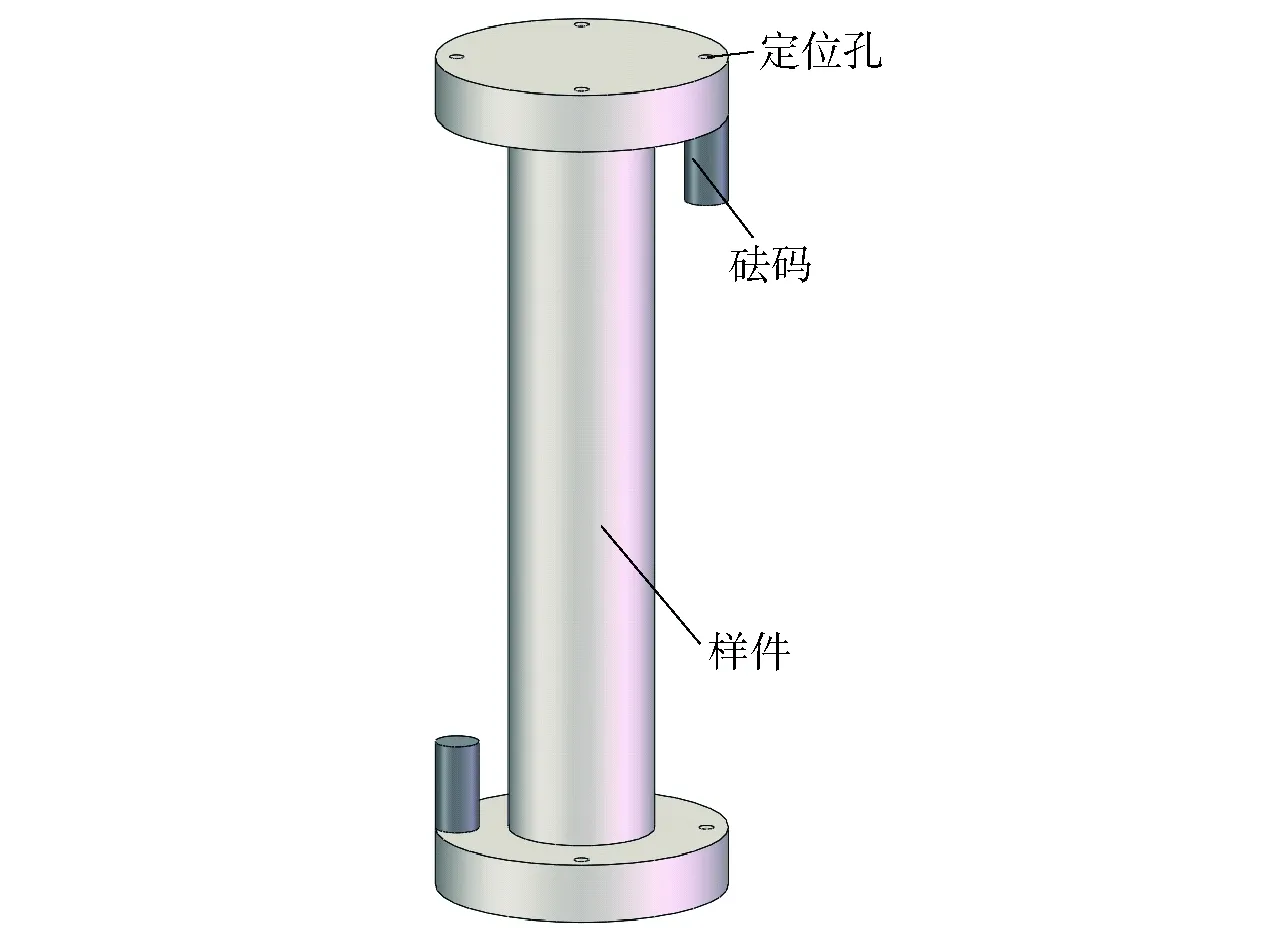
图4 转动惯量样件试验状态示意图Fig.4 Test status of the specimen
3.2 试验结果与分析
321 样件设计与理论值计算
样件设计采用圆柱体组合,呈哑铃形,叠加上2个小砝码,模拟不同惯量值的导弹弹头。采用轧制或锻件加工样件,其材料不均匀性引起的转动惯量误差不超过0033,采用理论计算值作为标准值是可行的。
理论上样件设计采用4个小砝码对称布置更为合理,但是考虑到4个零件尺寸与质量加工成一致难度较大,采用2个小砝码如图4所示布置,并不影响质心位置,同时可以证明满足振复摆运动微分方程(5)式,可以等效于4个小砝码。
圆盘与圆柱体转动惯量理论计算公式分别为=14、=112(3+),为圆盘或圆柱体半径,为圆柱体高度。同时需要对两端圆盘和小砝码加上移轴计算。计算得到的转动惯量理论值如表1所示。

表1 3台设备采用的样件理论值与当量Jd标定结果
322 设备系数标定
采用样件、样件+砝码1的理论值,分别测量摆动系统振复摆周期、样件+摆动系统振复摆周期、样件+砝码1+摆动系统振复摆周期1,取3次均值,按照(10)式计算值,结果如表1所示。
由表1可知,不同设备值分散度较大,从值的构成要素也可以看出,值呈非线性分布,对同一个设备因被测产品不同也存在一定的分散度。该方法对于专用设备而言,由于其测量产品相对固定,其值是稳定的。
323 测量结果与分析
将样件+砝码2作为导弹弹头测量转动惯量值,每个设备测量3组数据,计算得到测量值,再与理论值比较,得到误差值。测量数据如表2所示。表2中2为样件+砝码2的振复摆周期。
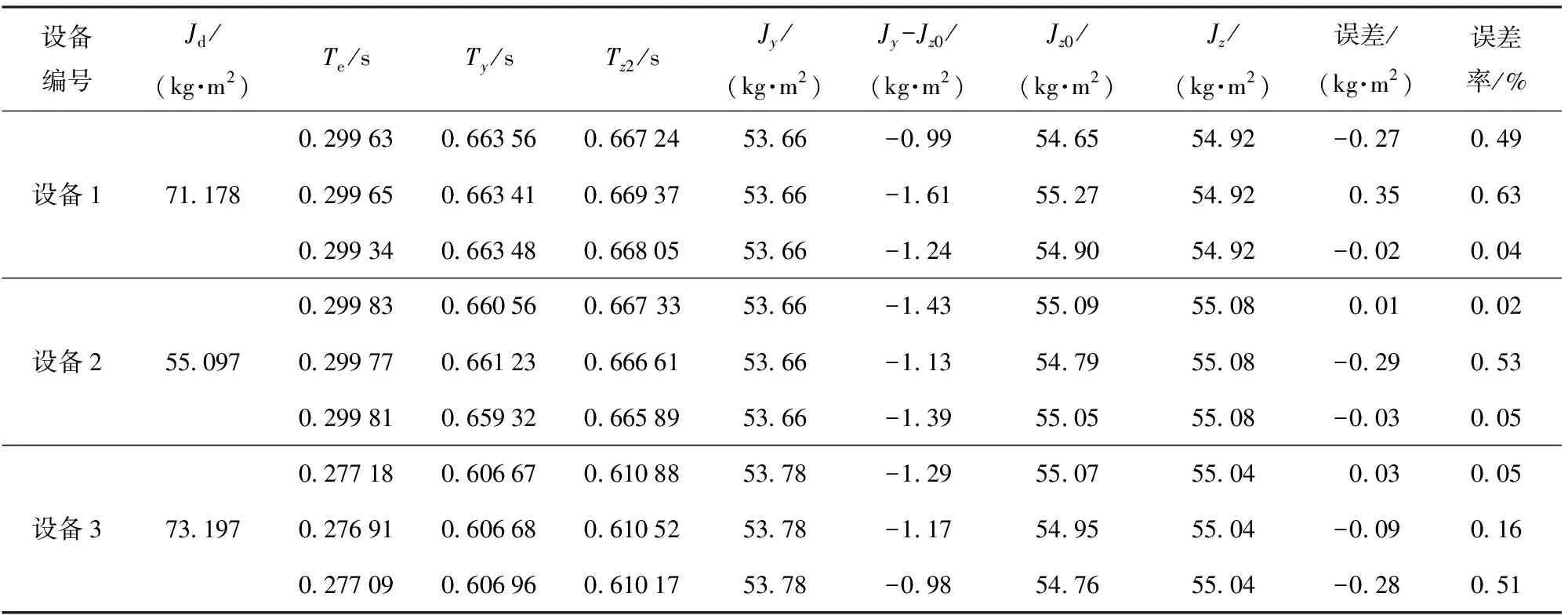
表2 3台设备Jz测量结果与测量误差
从表2中数据可以看出:最大绝对测量误差值035 kg·m,满足定型设备1 kg·m的误差要求;最大误差率为063,满足通常惯量测量1的测量精度要求。
表3所示为采用3次测量均值得到的计算结果′0与理论值以及与表2中的计算值0分别对比的结果。由表3可见,取均值计算的′0和取单次测量值计算的0的9个数据差值均在±001之内,与理论值相比最大绝对测量误差值为036 kg·m,表明可以把摆动系统周期存储起来,无需每次测量。
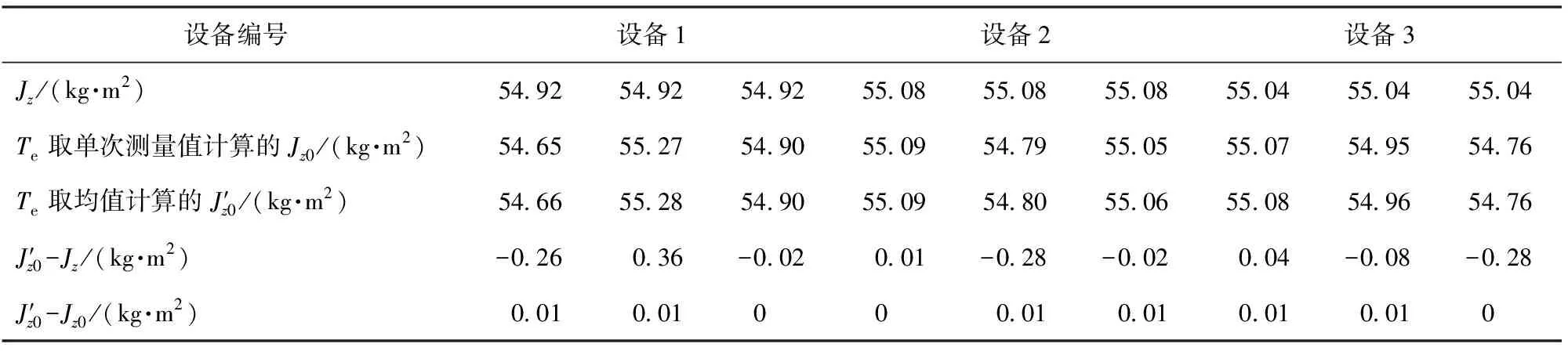
表3 Te取均值计算的J′z0和单次测量值计算的Jz0对比以及与理论值Jz对比
表4所示为值数据变化±5、±10后值准确度对测量结果的影响。由表4可见:值变化+5时,最大绝对误差043 kg·m,相对原值最大变化008 kg·m;值变化-5时,对应的2个数据分别为-034 kg·m、-007 kg·m;值变化+10时,对应的2个数据分别为052 kg·m、017 kg·m;值变化-10时,对应的2个数据分别为-040 kg·m、-016 kg·m。上述数据中最大绝对误差052 kg·m,且绝大多数数据值变化5时不超出01 kg·m,值变化10时不超出02 kg·m。
表4 Jd值变化对测量结果的影响
从以上数据对比结果可以看出,虽然值是非线性的多变量函数,但其本身的标定误差对另一分量测量结果的影响较小,采用标定值的方法进行协同测量能够满足测量精度要求,同时对于测量结果敏感度较低这一特点也预示着该方法具有良好的应用推广前景。

4 实际应用
采用直立振复摆与圆周扭摆协同测量技术,研发了新型的质量特性参数测量设备,避免了产品水平状态旋转90°的操作,经过调试与精度检定,达到了预期技术指标。测量用的水平工装无需滚转及定位机构,既简化了原水平工装结构,又提高了操作效率,节约了测量时间,去除了滚转机构带来的测量误差,进一步提高了测量精度。
设备交付用户后,已成功应用于某型号导弹弹头实弹测试,得到了包括3个转动惯量分量的所有质量特性参数数据(具体数据从略)。产品3个惯量分量与产品设计理论值吻合,与原全部采用扭摆法测量值高度一致,且多发产品的测量结果分散度较小,一致性较高,测量精度满足弹头飞控参数要求,成功保障了多次飞试任务,证明协同测量技术是可靠的,具有较高的测量精度。
同时协同测量技术应用在某型号带翼弹体的转动惯量测量,解决了产品水平状态沿翼展直立方向无法支撑的难题,实现了异形体三轴转动惯量的便捷测量。
5 结论
本文提出直立振复摆与圆周扭摆协同测量技术,给出了实现协同测量技术的具体机械结构,根据测量原理推导出了相应的计算方法,提出了当量惯量这一概念,同时提出了对进行标定这一思路,设计并进行了相关验证试验以及对试验结果进行了误差分析。得出以下主要结论:
1) 试验数据和弹头实测效果表明协同测量技术测量结果可靠,测量和计算方法可行,具有很好的工程应用价值。
2) 采用协同测量技术,弹头三轴转动惯量测量操作更加便捷,更加适应实战化需求。
3) 当量惯量是多参数函数,本文通过标定获取,标定误差对测量精度影响较小,对于测量系统容易固化,可进一步建立参数库,满足多型号弹头的测量需求。
[1] 卢志辉,孙志扬,李祥云,等.高精度质心测量方法研究[J].兵工学报,2009,30(12):1748-1752.
LU Z H,SUN Z Y,LI X Y,et al.Research on high precision measurement of centroid[J].Acta Armamentarii,2009,30(12):1748-1752. (in Chinese)
[2] 张磊乐,武艺泳,时永华.基于立式旋转平衡系统的惯性积测试方法研究[J].计量学报,2020,41(12A):124-128.
ZHANG L L,WU Y Y,SHI Y H.Research on the method of measuring inertial product based on vertical Rotating balance system[J].Acta Metrologica Sinica,2020,41(12A):124-128. (in Chinese)
[3] KLAUS L.Comparison of two experiments based on a physical and a torsion pendulum to determine the mass moment of inertia including measurement uncertainties[J].Measurement Science Review,2017,17(1): 9-18.
[4] 唐文彦,李慧鹏,张春富.扭摆法测量飞行体转动惯量[J].南京理工大学学报(自然科学版),2008,32(1): 69-72.
TANG W Y,LI H P,ZHANG C F.Measurement of flight object's moment of inertia using torsion pendulum[J].Journal of Nanjing University of Science and Technology (Natural Science),2008,32(1): 69-72. (in Chinese)
[5] 卢志辉,张磊乐,武艺泳,等.用于测量物体质心、转动惯量和惯性积的测量装置:CN104180940A [P].2016-08-17.
LU Z H,ZHANG L L,WU Y Y,et al.Measuring device for measuring center of mass,moment of inertia and inertial product: CN104180940A [P].2016-08-17. (in Chinese)
[6] 张磊乐.细长杆件质量特性参数测量技术及设备研究[D].郑州:郑州机械研究所有限公司,2008.
ZHANG L L.Research on the measuring technique and equipment for measurement of quality characteristic parameters of slender bar[D].Zhengzhou:Zhengzhou Research Institute of Mechanical Engineering Co.,Ltd.,2008. (in Chinese)
[7] 李慧鹏,唐文彦,张春富,等.导弹转动惯量测试系统及误差分析[J].兵工学报,2007,28(2):206-208.
LI H P,TANG W Y,ZHANG C F,et al.A measuring system of inertia moment of missile and its error analysis[J].Acta Armamentarii,2007,28(2):206-208. (in Chinese)
[8] 车英,李占国,陈礼华,等.弹丸转动惯量测试系统及其误差分析[J].兵工学报,2000,21(1): 87-89.
CHE Y,LI Z G,CHEN L H,et al.Development and error analysis of an inspecting system for measuring the rotational inertia of bullets[J].Acta Armamentarii,2000,21(1): 87-89. (in Chinese)
[9] 王德民,吴红刚,张健,等.基于扭摆法的三扭杆转动 惯量测量装置[J].机械设计与研究,2017,33(3): 131-133,137.
WANG D M,WU H G,ZHANG J,et al.Research on torsion pendulum based triple torsion bars device for measuring moment of inertia[J].Machine Design and Research,2017,33(3):131-133,137. (in Chinese)
[10] 卢志辉,支余吉.转动惯量标准件标准值的不确定度研究[C]∥全国计量测试技术学术交流会论文集.北京:中国计量测试学会,2016: 256-261.
LU Z H,ZHI Y J.Research on uncertainty of standard value of moment of inertia of standard sample[C]∥Proceedings of Collection of Essays of National Symposium on Measurement and Testing Technology.Beijing: Chinese Society for Measurement,2016:256-261. (in Chinese)
[11] 孙宝光,刘春兰,罗微.扭摆法测定物体的转动惯量实验中的标定研究[J].大学物理实验,2017,30(6):53-56.
SUN B G,LIU C L,LUO W.Research on the calibration in measuring objects’ processional moment by torsion pendulum method[J].Physical Experiment of College,2017,30(6):53-56. (in Chinese)
[12] 张心明,王凌云,刘建河,等.复摆法测量箭弹转动惯量和质偏及其误差分析[J].兵工学报,2008,29(4):450-453.
ZHANG X M,WANG L Y,LIU J H,et al.The measurement of inertia moment and centroidal deviation of rocket projectile with compound pendulum method and its error analysis[J].Acta Armamentarii,2008,29(4):450-453. (in Chinese)
[13] HOU W,ZHENG B,YANG R F.A measuring method on moment of inertia of large-scale ammunition[J].Journal of China Ordnance,2005,1(1):41-45.
[14] 徐向辉,陈平,唐一科,等.弹箭转动惯量的振复摆法测量及误差分析[J].弹箭与制导学报,2016,36(1):149-153.
XU X H,CHEN P, TANG Y K,et al.The inertia moment of projectile measured by vibration pendulum method and error analysis[J].Journal of Projectiles,Rockets,Missiles and Guidance,2016,36(1):149-153. (in Chinese)
[15] 张心明,王德民,李俊烨,等.基于复摆测量法阻尼对转动惯量的影响分析[J].长春理工大学学报(自然科学版),2018,41(4):54-59.
ZHANG X M,WANG D M,LI J Y,et al.Analysis on the influence of rotational inertia by damping based on compound pendulum measuring method[J].Journal of Changchun University of Science and Technology (Natural Science Edition),2018,41(4):54-59.(in Chinese)