装甲车辆三相同步电机宽频电磁兼容模型构建方法
2022-08-02熊瑛李小健周伟李楠焦美李燕杜晓琳聂秀丽纪相普
熊瑛, 李小健, 周伟, 李楠, 焦美, 李燕, 杜晓琳, 聂秀丽, 纪相普
(1.中国北方车辆研究所 电磁兼容实验室, 北京 100072; 2.陆军北京军代局, 北京 100071;3.陆军研究院装甲兵研究所, 北京 100072)
0 引言
现代战争爆发突然、作战节奏快,对快速反应、敏捷部署有极高的要求。对于地面装备,电驱动技术可有效提升机动性能,实现增速增程,是重要发展方向之一,而电驱动系统的电磁兼容问题也逐渐显露,并引起广泛关注。开关器件的非线性特性和大功率电机负载的动态阻抗失配会产生谐波、浪涌等电磁干扰,以传导或辐射的方式在装甲车辆内外传播。传导电磁干扰会威胁电网质量,造成电气设备故障,甚至引起系统功能失效。辐射电磁干扰会影响车载通信系统和低压控制系统的信号,进而影响通信性能和系统稳定性。由于电驱动系统发电和输电的复杂性,传统的基于经验和实验的后处理方法已无法准确定位和解决电驱动系统的电磁兼容问题。因此,有必要建立系统级电磁干扰(EMI)仿真预测和优化设计方法,在车辆研发的早期阶段发现并解决问题。
大量研究团队已经在系统级仿真和电磁干扰预测方面取得了成果。Grandi等提出了一种电驱动系统模型,该模型包含逆变器及电机的物理模型,需要提前对结构的寄生参数进行测量。Boglietti等提出了一种适用于不同电机功率(5~55 kW)的电机高频通用模型,该模型的电路参数通过端口测试进行反推,精度高,但适用频段有限。Gubia等提出了一种频域电驱动模型,该模型仅用于评估电驱动系统的共模干扰,对差模干扰无法预测。美国福特研究实验室Chen等建立了开关转换器、无源元件和连接器的等效电路模型;根据器件的物理特性推导出电路参数,并根据反射测量得到寄生电路参数,此电路模型在10 MHz之前精度较高,但在10~30 MHz频段误差较大。Jettanasen等建立了驱动系统共模传导EMI模型,驱动系统中的每个单元都有一个参数矩阵,可以模拟每个单元端口处的共模电流和电压。Moreau等提出了电机模型的高频等效电路。该方法提出了基于电机三相端口共模/差模阻抗拟合等效电路的方法,且提出了三相共模/差模阻抗与单相共模/差模阻抗的转换关系式。Maki等提出采用三维电磁场分析法构建电机物理等效电路模型。该方法采用静电场分析法得到定子绕组及线圈间的寄生电容,采用磁场分析法得到定子绕组的寄生电感和电阻,可实现电机的精确建模。Bondarenko等建立了基于测试的电驱动系统电路模型,阐述了系统结构和寄生电路元件之间的相关性。Kwack等基于有限元算法提取寄生参数的电驱动系统模型,该方法需要先明确电机的内部结构特征,且模型在较高频段精度不高。中国北方车辆研究所电磁兼容实验室提出了一种新型的驱动系统电磁干扰预测联合仿真方法,与试验结果具备良好的一致性。
综上所述,由国内外现有研究情况来看,在电磁兼容领域,高频电机建模的相关研究和所形成的方法存在以下局限性:1)大部分精确建模方法依赖于电机已知的内部详细结构特征,需要明确完备的寄生参数和采用针对性的精确测试方法;2)所提出的建模方法适用频段不宽,在开关谐波频段范围内模型精度较高,但在宽频脉冲干扰频段(>30 MHz)模型精确度下降较快。
针对以上问题,本文基于电机端口阻抗特性,提出一种三相同步电机宽频电磁兼容模型构建方法。对电驱动系统电磁干扰发射及耦合机理进行了要点分析;对三相电机宽频电磁兼容模型构建方法进行了详细介绍;以一台140 kW的电机为例,将其共模及差模端口阻抗拟合为等效电路模型,并将端口阻抗通过数学函数转换为单相共模、差模阻抗,并基于矢量拟合技术对单相阻抗进行数学拟合,最终构建出电机的电磁兼容等效电路模型。最后,通过与试验结果的对比,验证了该等效电路模型的有效性和准确性。
本文提出的方法具有以下优势:1)无需对电机进行详细物理建模,通过获取电机端口阻抗特性对电机进行特性参量数学拟合,简单且有效;2)所提出的电机模型在宽频段内可以保持较高的精度;3)所提出的电磁兼容模型易于系统级级联,能实现电驱动系统电磁干扰的快速预测,并可为系统级滤波方案提供动态负载阻抗匹配设计输入。
1 电驱动系统电磁干扰发射及耦合机理分析
电驱动系统中,开关电路高速切换状态是导致系统电磁干扰的主要原因。功率器件开关动作的时域波形理论上是矩形方波,实际上,二极管开关特性将导致器件的开通和关断需要一定的时间,因此通常在进行开关噪声分析时,将开关暂态过程用梯形波来表征,如图1所示。图1中,为梯形波幅值,为周期,为开关器件一周期的开通时间,为波形的上升时间,为波形的下降时间,=。
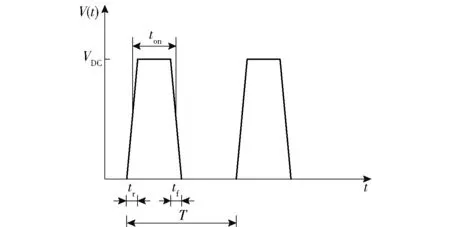
图1 梯形波示意Fig.1 Schematic diagram of the trapezoidal wave
梯形波频域电压函数为

(1)
式中:为自然数;为占空比,=;为频率,=1。
改变梯形波的幅值电压或开关器件的上升下降时间可以影响EMI特性,因其与dd正相关,意味着提高输入电压等级或减小开关上升下降时间,将会导致更严重的电磁干扰。
共模干扰是指电磁干扰经线缆、线缆与设备的对地寄生电容以及地形成的回路干扰。共模EMI的干扰源主要是由较高的dd与寄生电容间的相互作用而产生的高频振荡,寄生电容上有快速的电压变化,从而形成对地电流,再经其他设备的对地寄生电容和接地部分等耦合到其他敏感设备。差模EMI主要由电力电子设备产生的脉冲电流引起,其耦合路径(见图2)是直接通过线缆与电源形成回路。图2中,、、分别表示三相母线每相端点,、、、分别表征高压电池组、逆变器、三相线缆及电机的对地寄生电容;、、、、、分别表示6个半导体开关,表示电机负载中性点。
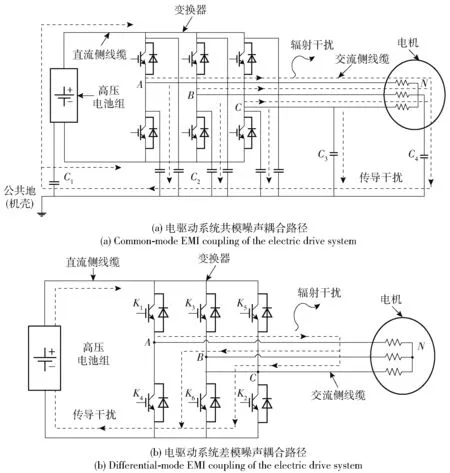
图2 电驱动系统噪声耦合路径Fig.2 EMI coupling paths of the electric drive system
图3展示了额定电压为540 V某新能源客车高压高功率电驱动系统动态加载条件下的传导发射测试结果,并将实测干扰频谱与国家标准GB/T 18655—2018车辆、船和内燃机无线电骚扰特性用于保护车载接收机的限值和测量方法中的传导发射标准限值进行了比较。从图3中可以看出:对于新能源汽车领域的电驱动系统而言,传导干扰的影响范围高至100 MHz;为有效控制电驱动系统电磁干扰,实现基于模型的电磁兼容性设计,应保证电机模型的适用频段至少达到100 MHz。
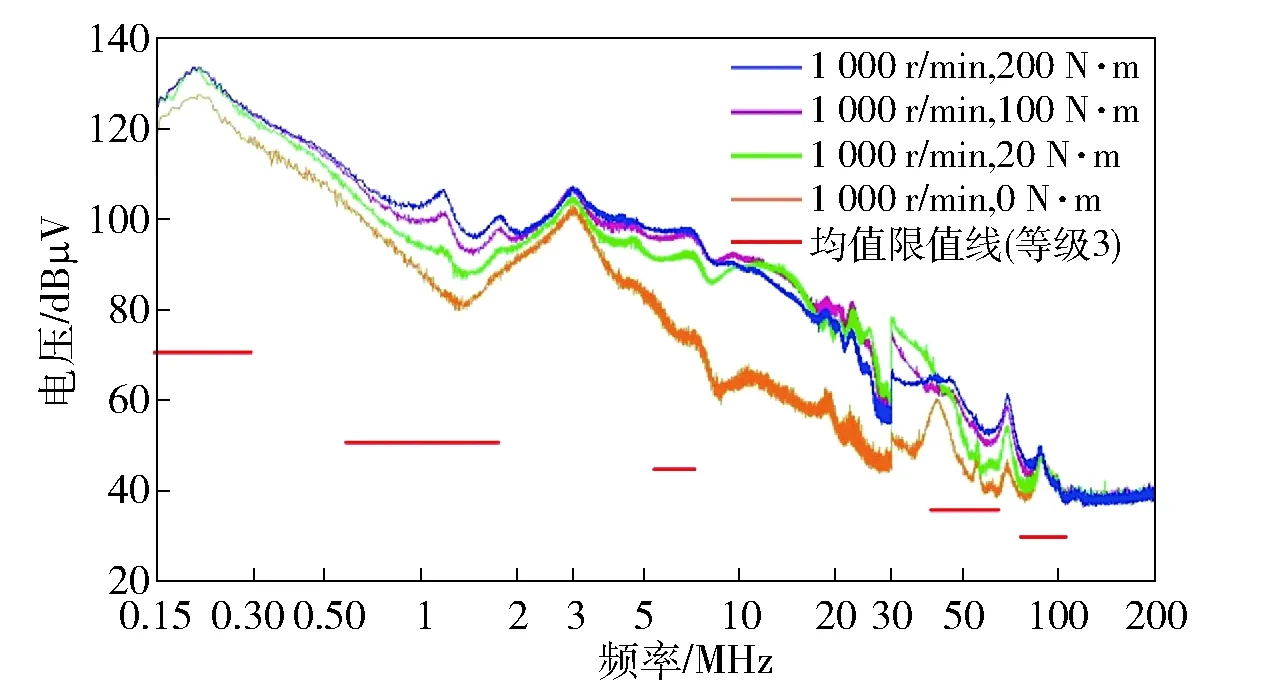
图3 传导干扰实测结果与标准限值线的对比Fig.3 Comparison between measured EMI values and standard limits
2 三相电机宽频电磁兼容模型构建方法
三相同步电机是干扰耦合回路中的重要一环,复杂、紧凑的结构为电磁干扰的传播提供了丰富的低阻抗寄生通道。对电驱动系统的电磁兼容性仿真分析而言,三相同步电机的精确建模极为重要。对称性使得可以用单相等效电路模型来构建整个电机的高频电路模型。图4所示为交流电机单相等效模型,是由共模阻抗和差模阻抗共同组成的。共模阻抗表示单相定子绕组对参考地(电机外壳)的阻抗特性,差模阻抗表示单相定子绕组的阻抗特性。因此,只需要知道单相和的阻抗幅频特性曲线,基于矢量拟合技术构建等效电路的方法,就能建立单相高频等效模型,再将3个单相模型连接即可建立整个三相同步电机的高频等效电路模型。

图4 交流电机单相等效模型Fig.4 Equivalent model of the single-phase impedance
单相共模阻抗和差模阻抗难以通过直接测量获取,本文通过测量电机端口差模和共模阻抗幅频特性再加以数学转换的方式间接获得。
2.1 端口阻抗测试
图5所示为电机阻抗测量示意图,图6所示为电机共模阻抗测量电路及其等效电路。对于定子绕组是星形连接的电机,利用阻抗分析仪分别对其进行共模阻抗和差模阻抗测量,连接示意图如图5(a)和图5(b)所示,图中1、2、3分别表示电机三相线端口。
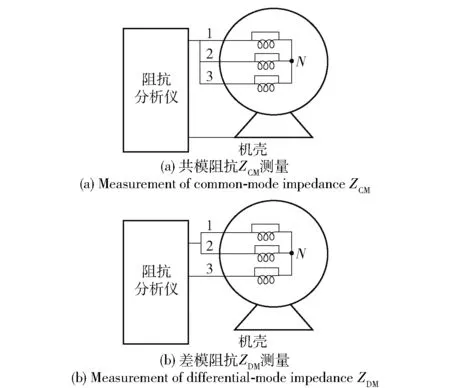
图5 电机阻抗测量示意图Fig.5 Schematic diagram for impedance measurement of the three-phase motor
图5(a)为电机三相端口短接后再与电机外壳分别接阻抗分析仪,其基本电路及等效电路如图6(a)和图6(b)所示;图5(b)所示电机差模阻抗测量示意图是将电机1、2端口短接后再与3端口分别接阻抗分析仪,其等效电路模型如图7(a)和图7(b)所示。

图6 电机共模阻抗ZCM测量电路及其等效电路Fig.6 Common-mode impedance ZCM and its equivalent circuit

图7 电机差模阻抗ZDM测量电路及其等效电路Fig.7 Differential-mode impedance circuit ZDM and its equivalent circuit
2.2 Zcm和Zdm频域特性求解推导
将电机的端口共模阻抗和差模阻抗以及单相共模阻抗和差模阻抗分别用实部和虚部来表示,有
()=()+j()
(2)
()=()+j()
(3)
()=()+j()
(4)
()=()+j()
(5)
式中:j为虚部;为频率;()、()分别为端口共模阻抗在频域上的实部和虚部分量;()、()分别为端口差模阻抗在频域上的实部和虚部分量;()、()分别为单相共模阻抗在频域上的实部和虚部分量;()、()分别为单相差模阻抗在频域上的实部和虚部分量。
根据图6所示的电机共模阻抗测量等效电路以及图7所示的电机差模阻抗测量等效电路,可得到如下关系:

(6)

(7)
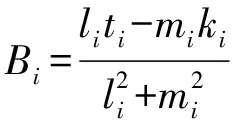
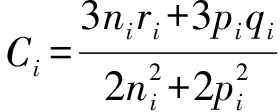
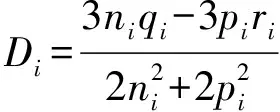
对于测量的每一个频点(=1,2,3,…),其对应的、、、的实部与虚部分别为、、、、、、、,将(4)式和(5)式代入(6)式和(7)式中,可得到如下公式:

(8)
(9)
(10)
(11)
式中:

(12)
=2++
(13)
=6+3
(14)
=6+3
(15)
=+
(16)
=+
(17)
=-
(18)
=+
(19)
由于和是由阻抗分析仪直接测量获得的,其虚部与实部、、、对应每个频点的值是已知的,因此可以通过(8)式、(9)式、(10)式和(11)式4个方程联立求解出对应每个频点的、、、,再通过求解出的、、、就能绘出电机单相共模阻抗和差模阻抗幅频特性曲线,然后根据阻抗幅频特性曲线以及矢量拟合等效建模的方法,建立电机单相高频等效电路,最后将3个单相高频等效电路模型按星形连接构成整个交流电机的高频等效电路模型。
3 测试与等效电路拟合结果对比及讨论
采用第2节描述的三相电机宽频电磁兼容模型构建方法对1台额定功率为140 kW的永磁同步电机进行等效模型构建。对象电机的基本参数如表1所示。
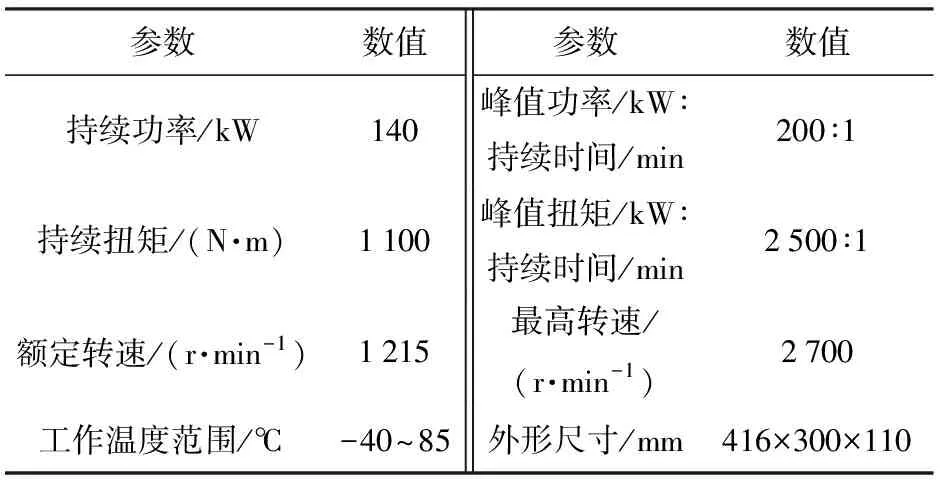
表1 电机的基本技术参数
下面详细阐述该电机的电磁兼容模型构建步骤。
3.1 电机三相端子共模和差模阻抗测试
根据第2节的端口阻抗测试方法,按照图5连接方法用阻抗分析仪分别测量某三相永磁同步电机共模阻抗和差模阻抗的幅频特性曲线,频率范围为1 kHz~120 MHz,阻抗分析仪型号为美国是德科技公司生产的Agilent4294A,实测照片如图8所示。测得的幅频特性曲线和相频特性曲线如图9(a)和图9(b)所示,测得的幅频特性曲线和相频特性曲线如图10(a)和图10(b)所示。

图8 电机阻抗实测图Fig.8 Impedance test of the three-phase motor

图9 电机共模阻抗频域特性曲线Fig.9 Frequency-domain characteristic of common-mode impedance of the three-phase motor
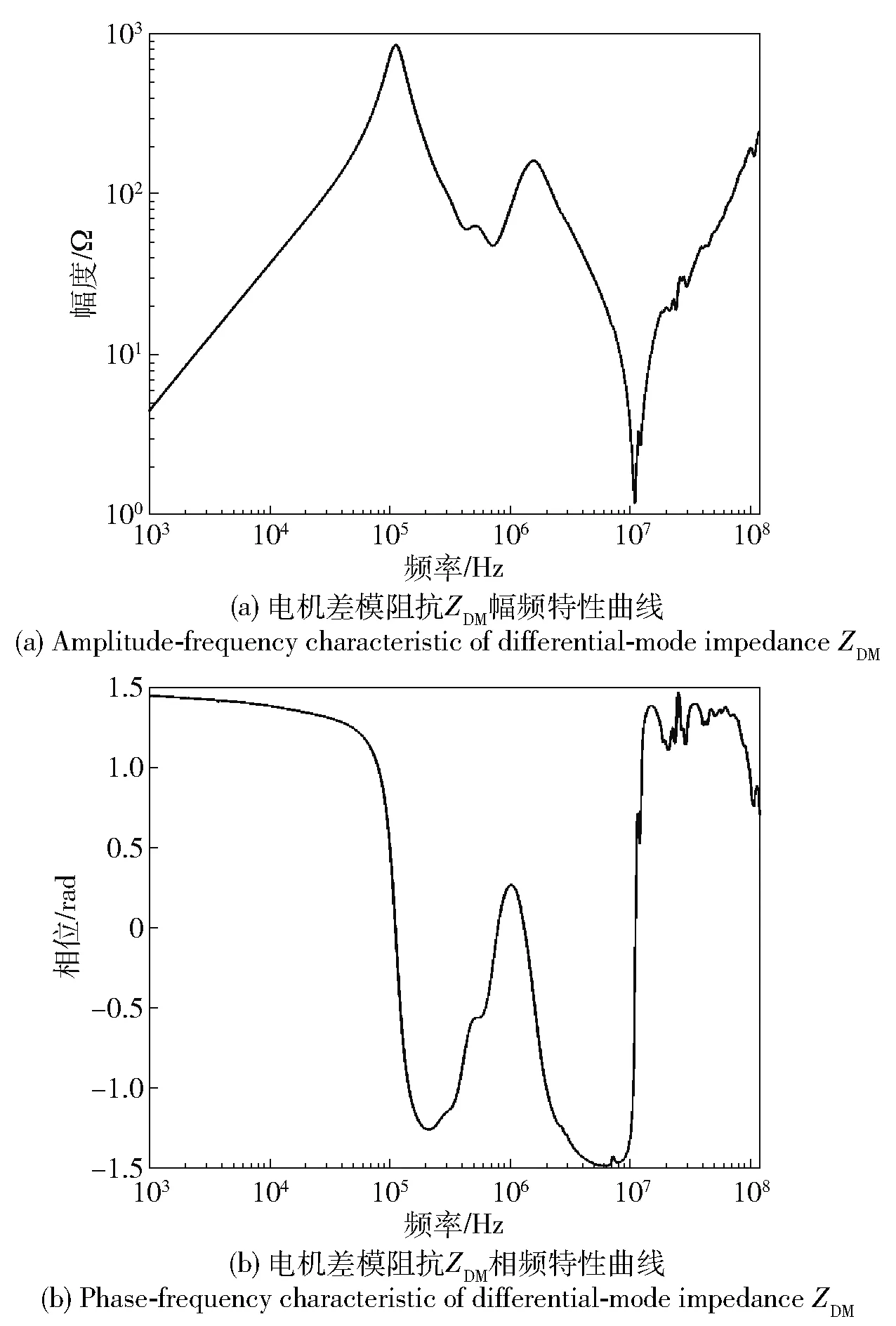
图10 电机差模阻抗频域特性曲线Fig.10 Frequency-domain characteristic of differential-mode impedance of the three-phase motor
3.2 电机静态共模阻抗与动态共模阻抗对比
对运转中电机的共模阻抗进行测试,并与静态共模阻抗进行对比分析。电机从静止状态到稳定运转状态期间,电机的共模阻抗特性发生变化。同时,通过对多种运转工况下的电机动态共模阻抗进行测试对比,可以发现当电机负载率在10%以上,即电机运转功率在额定功率的10%以上时,电机动态共模阻抗特性基本一致。因此,本文选用1 000 r/min、200 N·m运转工况(约15%负载率)下的电机动态阻抗作为对比分析对象。首先参考文献[20]中的方法,采用示波器分别对电机端口的三相电压、共模电流进行时域实采,并将时域数据通过时频变换转换至频域。然后将电压除以电流来计算电机动态运转时的阻抗,结果如图11所示。通过电机动态阻抗与静态阻抗的对比可以发现:当频率低于400 kHz时,静态阻抗低于动态阻抗,这是因为电机在动态运转情况下,轴的油膜被均匀甩开,电机轴和轴承之间被油膜隔离,所以低频等效阻抗较大;电机在静止状态下,轴与轴承之间存在接触面,低频等效阻抗较小;在4 kHz以下,静态阻抗高于动态阻抗,这是因为电机动态阻抗在10 kHz处发生并联谐振,其在低于10 kHz频段表现为感性阻抗导致的现象。本文基于静态阻抗开展建模方法的应用验证,该方法对于动态阻抗同样适用。

图11 电机静态与动态共模阻抗对比示意图Fig.11 Comparison of stable and dynamic impedance of the three-phase motor
3.3 电机单相共模和差模阻抗解析求解
根据测得的电机共模阻抗和差模阻抗幅频特性曲线和相频特性曲线,使用(8)式~(19)式在每个测量频率点计算、、、,可以得到、、、随频率的变化;根据(4)式和(5)式,用、、和构建单相共模阻抗和单相差模阻抗,最后绘出单相共模阻抗和差模阻抗在1 kHz~120 MHz内的幅频特性曲线,如图12(a)和图12(b)所示。

图12 单相阻抗等效变换结果Fig.12 Characteristics of single-phase impedance
3.4 基于矢量拟合技术的电机单相共模和差模阻抗特性拟合及等效电路构建
根据图12(a)所示单相共模阻抗幅频特性曲线,基于矢量拟合技术,用6级电路来等效单相共模阻抗电路拓扑,如图13所示。图13中,和分别表示一次项拟合的串联电阻和电感;和分别表示实数极点- 留数项拟合的并联电阻和电容;(取值为3~6)、、1、2分别表示复数极点- 留数对拟合的第级电感、电容、支路电阻1、支路电阻2。等效电路拓扑的取值在表2中列出。

图13 共模等效电路(6级)Fig.13 Equivalent common-mode circuit

表2 电机单相共模电路参数值
同理,根据图12(b)单相差模阻抗幅频特性曲线,用7级电路来等效单相差模阻抗电路拓扑,如图14所示。其中,和分别表示一次项拟合的串联电阻和电感;和分别表示实数极点- 留数项拟合的并联电阻和电容;(取值为3~7)、、1、2分别表示复数极点- 留数对拟合的第级电感、电容、支路电阻1、支路电阻2。等效电路拓扑的取值在表3中列出。
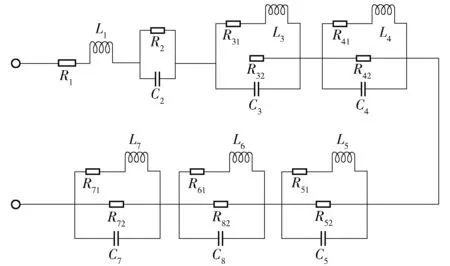
图14 差模等效电路(7级)Fig.14 Equivalent differential-mode circuit

表3 电机单相差模的电路参数值
分别对和的等效电路模型进行仿真,得到1 kHz~120 MHz范围内和的阻抗幅频特性曲线,并将仿真结果与实测推算结果(即图12(a)和图12(b))进行对比,结果如图15(a)和图15(b)所示。
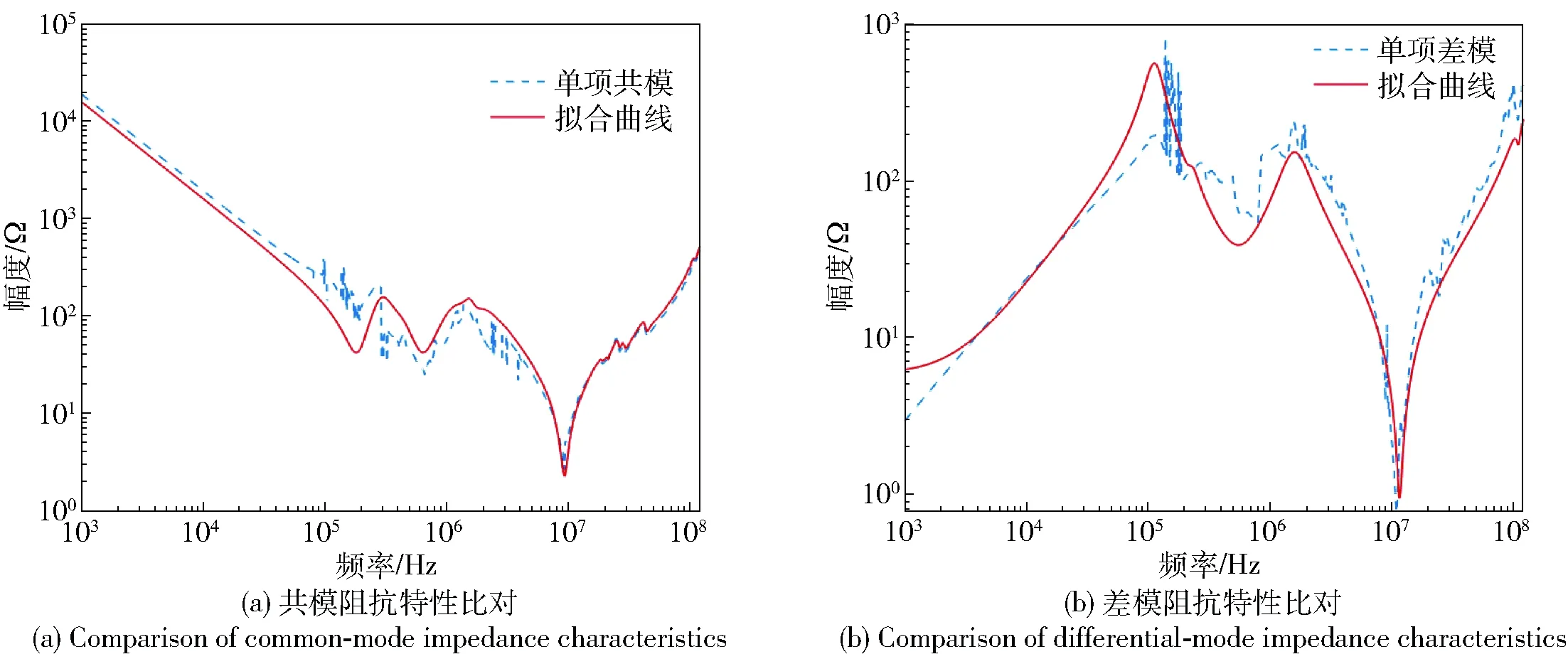
图15 电机阻抗特性比对Fig.15 Comparison of test curve and fitted curve
3.5 电机高频电磁兼容等效模型构建及精度分析
从单相和阻抗幅频特性对比曲线可以看出,在1 kHz~120 MHz范围内,仿真结果与实测推算结果的变化趋势一致,相对误差较小,表明本文建立的电机单相和等效电路是正确有效的,将和等效电路按照图5连接获得电机单相高频等效电路,如图16所示,最后将单相等效电路按星形连接得到完整的电机高频等效电路模型,如图17所示。
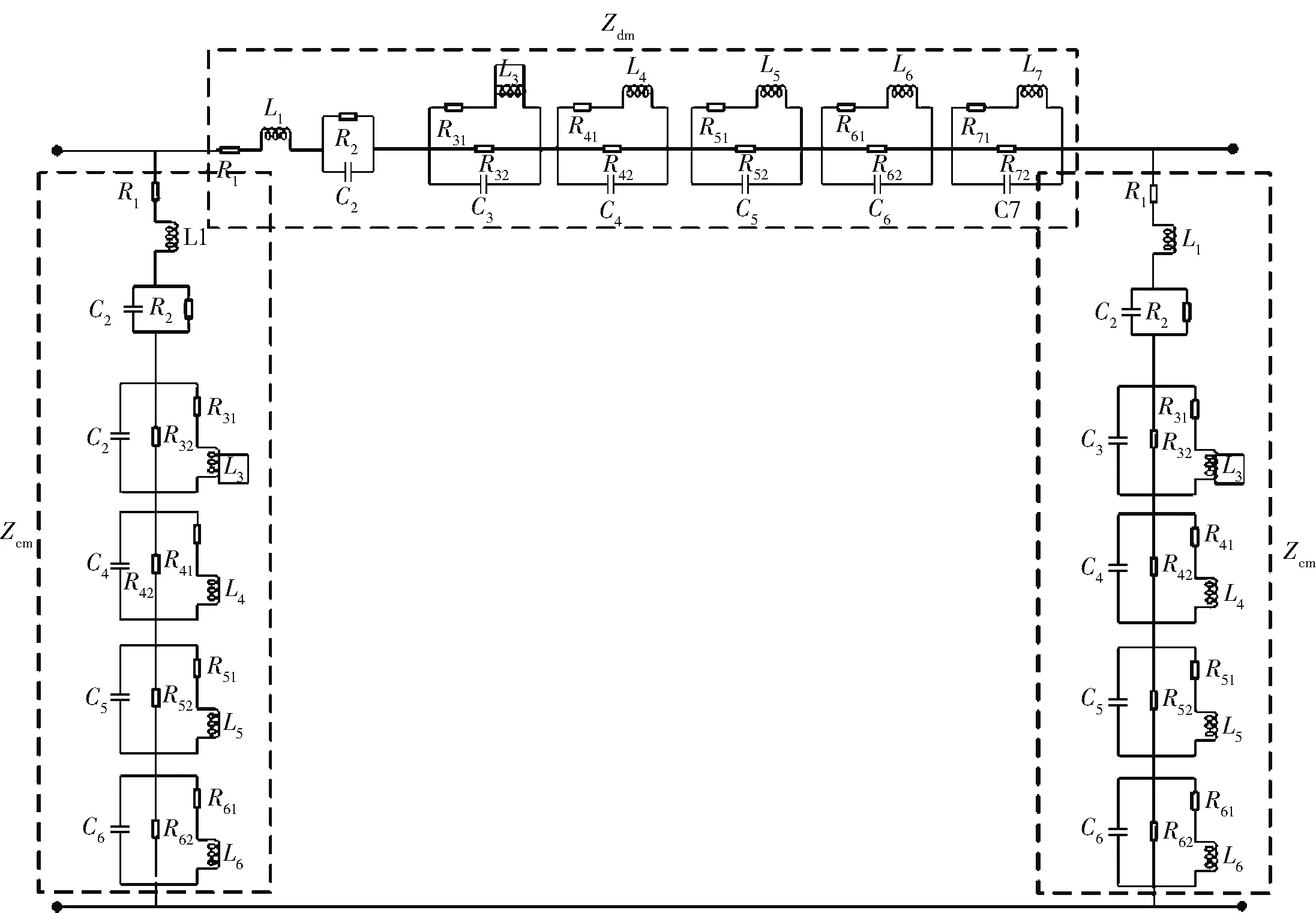
图16 电机单相高频等效电路模型Fig.16 High-frequency equivalent circuit model for single-phase impedance
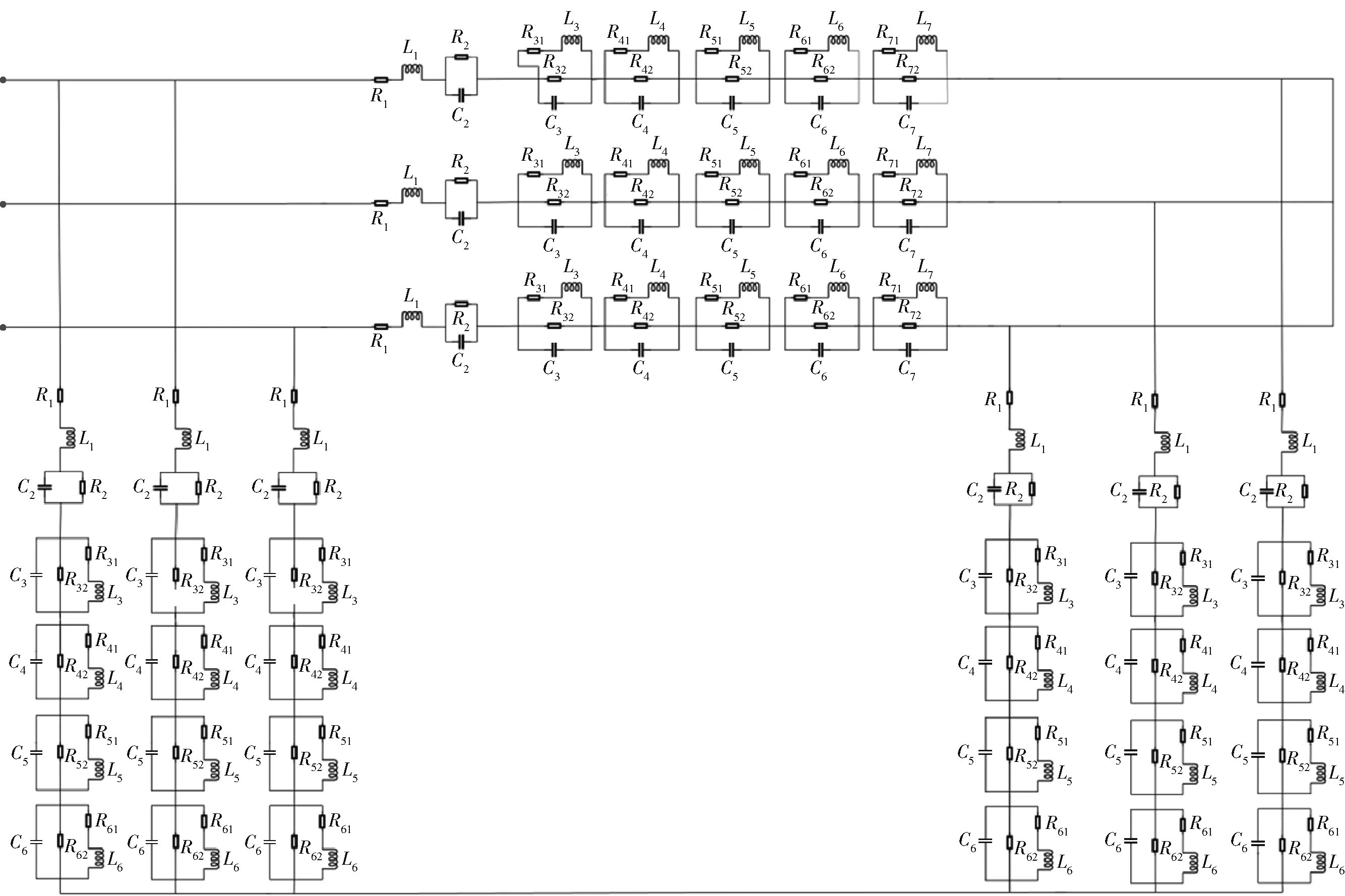
图17 电机高频等效电路模型Fig.17 High-frequency equivalent circuit model of the motor
为进一步验证本方法的精确性,通过(10)式及(11)式,将拟合得到的单相电路阻抗频域特性反推得到三相端子的阻抗频域特性,并对比1 kHz~120 MHz频率范围内的仿真与实测曲线,如图18(a)和图18(b)所示。从图18中可以看出:对于共模频域特性曲线,仿真与测试有良好的吻合度;对于差模频域特性曲线,在第1个谐振点有些许偏移,这是因为解析求解单相系数时,在此频段附近出现了近零极值,极值段附近的数值采用插值近似,但就结果来看,整个宽频范围内仍旧保持较高的精度。
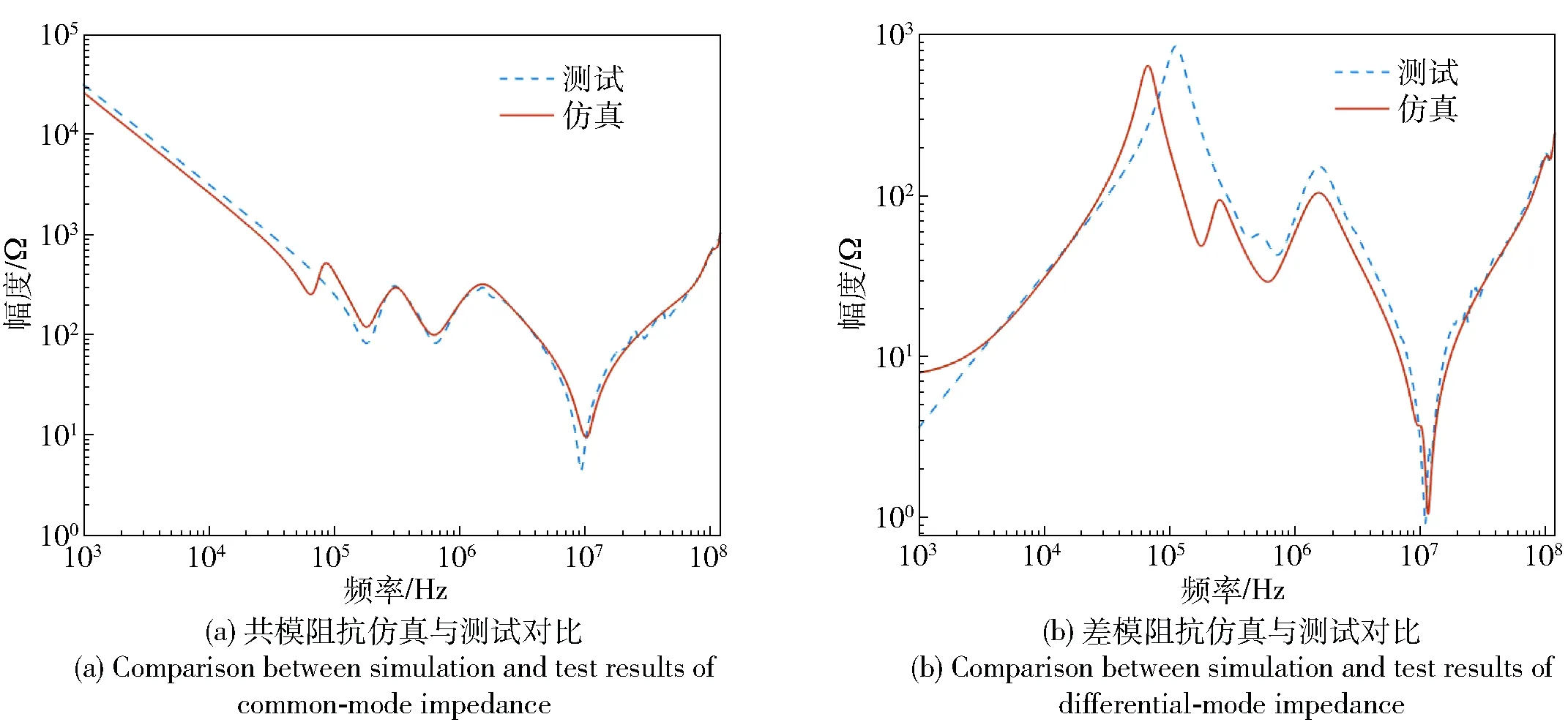
图18 共模及差模阻抗仿真与测试对比Fig.18 Comparison between simulation and test results of common-mode and differential-mode impedance
4 结论
本文基于电机端口阻抗特性,提出一种三相同步电机宽频电磁兼容模型构建方法。该方法具有以下优势:
1)基于矢量拟合法实现,有效频率范围可根据实际使用需求控制,灵活性强。
2)模型形式为阻抗网络,复杂度低、收敛性好,易于嵌入复杂系统开展系统仿真。
3)模型精度高,适用于寄生效应复杂的应用场景。
4)建模过程无需考虑电机内部实现方式与结构特征,适用范围广泛。
基于本文所提方法,设计人员可快速、高效地构建电机电磁兼容模型,在宽频范围内具备较高的精度和良好的收敛性,可有效支撑设计人员对电磁干扰的快速定位和分析评估。
[1] 郭弘明,席军强,陈慧岩,等.电驱动无人履带车辆线控机电联合制动技术研究[J].兵工学报,2019,40(6):1130-1136.
GUO H M,XI J Q,CHEN H Y,et al.Research on wire-controlled electro-mechanical combined braking technology for electric drive unmanned tracked vehicles[J].Acta Armamentarii,2019,40(6):1130-1136.(in Chinese)
[2] ZHENG F,WANG A,WU Z,et al. Capacitor tolerance criterion for three-phase EMI filters to attenuate noise of PWM inverters[J].IEEE Transactions on Power Electronics,2021,36(8):9080-9092.
[3] 龙海清.电动汽车PWM驱动电机系统EMC研究[D].重庆:重庆大学,2014.
LONG H Q.Study on the EMC of PWM drive motor system of electric vehicle[D].Chongqing:Chongqing University,2014.(in Chinese)
[4] HAN D,LI S,WU Y,et al.Comparative analysis on conducted CM EMI emission of motor drives:WBG versus Si devices[J].IEEE Transactions on Industrial Electronics,2017,64(10):8353-8363.
[5] GRANDI G,CASADEI D,REGGIANI U. Analysis of common- and differential-mode HF current components in PWM inverter-fed AC motors[C]∥Proceedings of the PESC 98 Record 29th Annual IEEE Power Electronics Specialists Conference. Fukuoka,Japan:IEEE,1998:1146-1151.
[6] BOGLIETTI A,CARPANETO E.Induction motor high frequency model[C]∥Proceedings of the 1999 IEEE Industry Applications Conference. Phoenix,AZ,US:IEEE,1999:1551-1558.
[7] GUBIA E,SANCHIS P,URSUA A,et al.Frequency domain model of conducted EMI in electrical drives[J].IEEE Power Electronics Letters,2005,3(2):45-49.
[8] CHEN C C,XU X.Modeling the conducted EMI emission of an electric vehicle(EV) traction drive[C]∥Proceedings of IEEE 1998 International Symposium on EMC.Denver,CO,US:IEEE,1988:796-801.
[9] JETTANASEN C,COSTA F,VOLLAIRE C.Common-mode emissions measurements and simulation in variable-speed drive systems[J].IEEE Transactions on Power Electronics,2009,24(11):2456-2464.
[10] MOREAU M,IDIR N,MOIGNE P L.Modeling of conducted EMI in adjustable speed drives[J].IEEE Transations on Electromagnetic Compatibility,2009,51(3):665-671.
[11] MAKI K,FUNATO H,SHAO L.Motor modeling for EMC simulation by 3-D electromagnetic field analysis[C]∥Proceedings of 2009 IEEE International Electric Machines and Drives Conference.Miami,FL,US:IEEE,2009:103-108.
[12] BONDARENKO N,ZHAI L,XU B,et al.A measurement-based model of the electromagnetic emissions from a power inverter[J].IEEE Transactions on Power Electronics,2015,30(10):5522-5531.
[13] KWACK Y,KIM H,SONG C,et al.EMI modeling method of interior permanent magnet synchronous motor for hybrid electric vehicle drive system considering parasitic and dynamic parameters[C]∥Proceedings of 2015 Asia-Pacific Symposium on Electromagnetic Compatibility.Taipei,China:IEEE,2015:78-81.
[14] XIONG Y,LI X,LI Y,et al.A High-frequency motor model constructed based on vector fitting method[C]∥Proceedings of 2019 Joint International Symposium on Electromagnetic Compatibility,Sapporo and Asia-Pacific International Symposium on Electromagnetic Compatibility.Sapporo,Japan:IEEE,2019:191-194.
[15] PAN X,EHRHARD R,VICK R.An extended high frequency model of permanent magnet synchronous motors in hybrid vehicles[C]∥Proceedings of the 10th International Symposium on Electromagnetic Compatibility.York,UK:IEEE,2011:690-694.
[16] HE H,ZHANG C,ZHANG Z.Conductive EMI analysis and suppression technology of electric vehicle driving system[C]∥Proceedings of the 2017 29th Chinese Control And Decision Conference.Chongqing,China:IEEE,2017:315-318.
[17] REVOL B,ROUDET J,SCHANEN J,et al.EMI study of three-phase inverter-fed motor drives[J].IEEE Transactions on Industry Applications,2011,47(1):223-231.
[18] HUANG F Y,WANG S,YANG J,et al. Conducted EMI simulation for a high power ultra-precision PMSM driven by PWM converter[C]∥Proceedings of the 2016 IEEE International Symposium on Electromagnetic Compatibility.Ottawa,ON,Canada:IEEE,2016:645-650.
[19] GUSTAVSEN B,SEMLYEN A.Rational appraoximation of frequency domain responses by vector fitting[J].IEEE Transaction on Power Delivery,1999,14(3):1052-1061.
[20] CHEN H,YE S.Modeling of common-mode impedance of an inverter-fed induction motor from online measurement[J].IEEE Transaction on Electromagnetic Compatibility,2018,60(5):1581-1589.