深空合作目标高概率捕获复合扫描策略研究
2022-07-21扈航刘磊李聪曹桂兴
扈航,刘磊,*,李聪,曹桂兴
1. 西北工业大学 航天学院,西安 710072 2. 陕西省空天飞行器设计重点实验室,西安 710072 3. 中国空间技术研究院 通信与导航卫星总体部,北京 100094
1 引言
传统的微波通信方式已不能满足未来深空探测活动的应用需求[1],与微波通信相比,激光通信具有传输带宽高、相干性好、指向性好、抗干扰和截获能力强等特点,在同等通信速率情况下设备质量更轻,功耗更小,具有良好的应用前景,受到了各国的广泛关注[2-5]。目前美国已经进行了月地激光通信演示验证项目(LLCD)[6-7],并将继续开展用于深空探测和行星探测的激光通信项目,主要包括深空光通信项目[8](DSOC)、O2O项目[9]等。欧洲航天局(ESA)参与了美国LLCD项目,并计划实施自己的深空激光通信项目[10]。
中国深空探测任务正在对200万千米以上距离的空间进行深度探测,并需要传递大量探测数据到地球,通信距离长,双向时间延时超过13 s。通过近地航天器中继实现地面与深空合作目标的通信,可以将激光通信链路的衰耗分摊到两段上,在减小大气影响的同时放宽对合作目标探测器灵敏度的要求。但在近地航天器与深空合作目标的通信中也存在一些困难,首先深空环境复杂,合作目标受到多种摄动影响,位置不确定区域较大;其次,受到激光功率限制,深空任务下激光束散角较小,一般在100 μrad以下;另外,近地航天器平台本身存在振动,该振动会传递给跟瞄系统,进而引起光轴抖动[11],在大通信距离下会导致光斑的明显偏移。捕获是激光通信建链的第一步,如何在扫描光束抖动的情况下实现对大不确定区域的短时间、高概率捕获,是一个亟须解决的问题。
针对通信建链中的捕获问题,国内外许多学者、机构进行了广泛的研究和试验,文献[12]对光栅扫描、螺旋扫描、光栅螺旋扫描等多种扫描轨迹进行了研究,分析了它们的优缺点。文献[13]提出了一种捕获和跟踪系统的模型并对模型性能进行了验证。2008年,欧空局在两颗低轨卫星NFIRE与TerraSAR-X之间进行了激光通信在轨验证试验,两颗卫星间距5 000 km,捕获时间为13 s[14]。文献[15]基于无信标捕获方案分析了多种扫描轨迹的适用性。文献[16]提出了一种螺旋正弦的扫描轨迹,有效较低了螺旋扫描的无效重叠率。文献[17]针对10 000~70 000 km的星间激光通信场景提出扫描捕获模型及其验证方案,仿真结果与理论推算保持一致;但该研究中激光束散角与目标位置不确定区域的比值较大,并且主要基于工程经验对参数进行优选,参数优化的全局性无法保证。目前国内外进行的研究和试验主要针对通信距离在10万千米以下的星间激光通信场景,扫描光斑较大,对于大不确定区域、小扫描光斑的深空激光通信场景研究较少。
本文针对大不确定区域、小扫描光斑情况下的捕获问题,设计了一种基于两级执行机构的高概率捕获复合扫描策略。从不确定区域划分方式出发,对子区域内扫描轨迹、子区域间扫描顺序进行了研究。然后建立了捕获概率和扫描时间模型,并根据捕获概率和扫描时间构造了目标函数。最后通过遗传算法进行了优化,得到了参数优化后的扫描方案。基于该策略所得的优化扫描方案捕获概率高、扫描时间短,在深空合作目标建链捕获等场景中具有一定的应用价值。
2 深空合作目标激光捕获基本原理
深空合作目标激光建链的捕获过程可以表述如下:首先根据通信双方位置不确定区域、探测器视场和光端机激光束散角之间的大小关系,确定扫描端、接收端以及捕获形式;然后,选择合适的扫描策略对接收端不确定区域进行扫描;当扫描端激光束进入接收端探测器视场后,接收端根据探测器解算出来的发射端位置信息调整光端机指向并发射激光;最后,当双方激光均进入对方探测器视场并对准时,捕获阶段完成。
在深空探测任务中,合作目标将搭载大视场探测器,视场可达2°(34.91 mrad);考虑到近地航天器可以精确定轨,不确定区域一般优于0.1°(1.75 mrad),远小于合作目标探测器视场,因此选择合作目标探测器视场凝视、近地航天器激光器扫描的捕获形式。本文将在以上捕获形式的基础上,对捕获阶段的扫描策略进行研究。
3 高概率捕获复合扫描策略
针对与深空合作目标的激光通信建链问题,本文提出一种短时间、高概率捕获的复合扫描策略,以伺服转台和快摆镜作为两级执行机构,具体实施过程为:将合作目标可能出现的不确定区域划分为若干子区域,在每个子区域内通过快摆镜进行扫描,每个子区域大小均不超过快摆镜最大行程θmax;当上一个子区域扫描完成后,通过伺服转台改变跟瞄系统视轴指向,视轴进入下一个子区域,继续利用快摆镜进行扫描,依此类推直至完成对整个不确定区域的扫描。
3.1 不确定区域扫描策略
不确定区域的扫描策略包括不确定区域的划分方式和不确定区域的扫描轨迹。
(1)不确定区域划分方式
考虑到子区域扫描的可重复性,选取不确定区域外接矩形后将矩形区域划分为若干等大的正方形子区域,不确定区域的划分方式如图1所示。
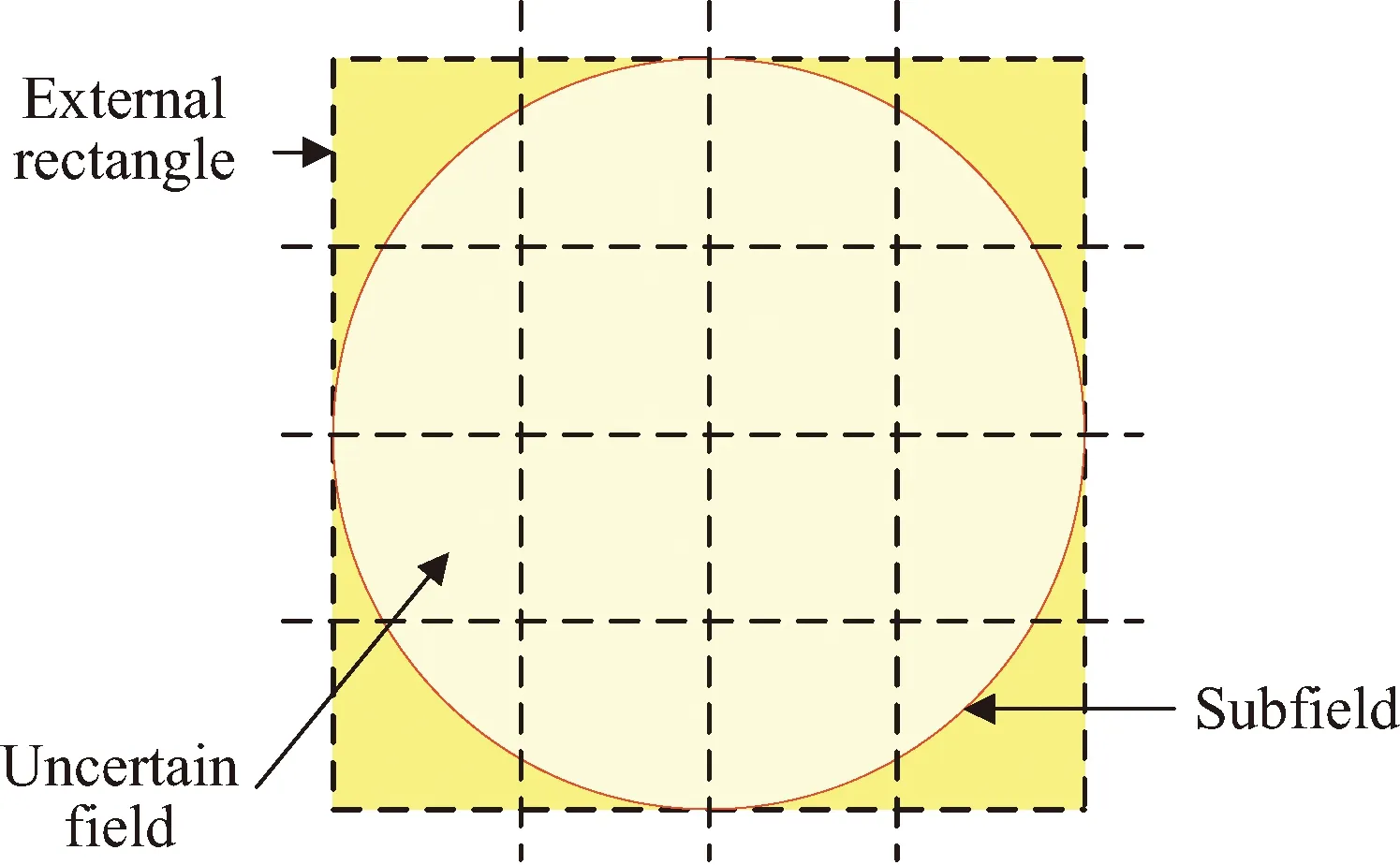
图1 不确定区域划分方式Fig.1 Division of uncertain field
(2)不确定区域扫描轨迹
对于复合扫描策略而言,不确定区域的扫描轨迹设计包括两部分:子区域间的扫描顺序和子区域内的扫描轨迹。目前常见的扫描轨迹包括螺旋扫描、光栅扫描、光栅螺旋扫描、玫瑰形扫描和李萨如形扫描等,它们的扫描轨迹示意如图2所示。
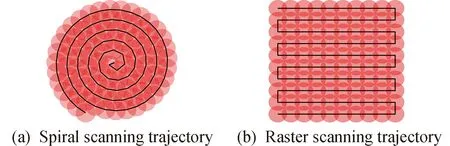

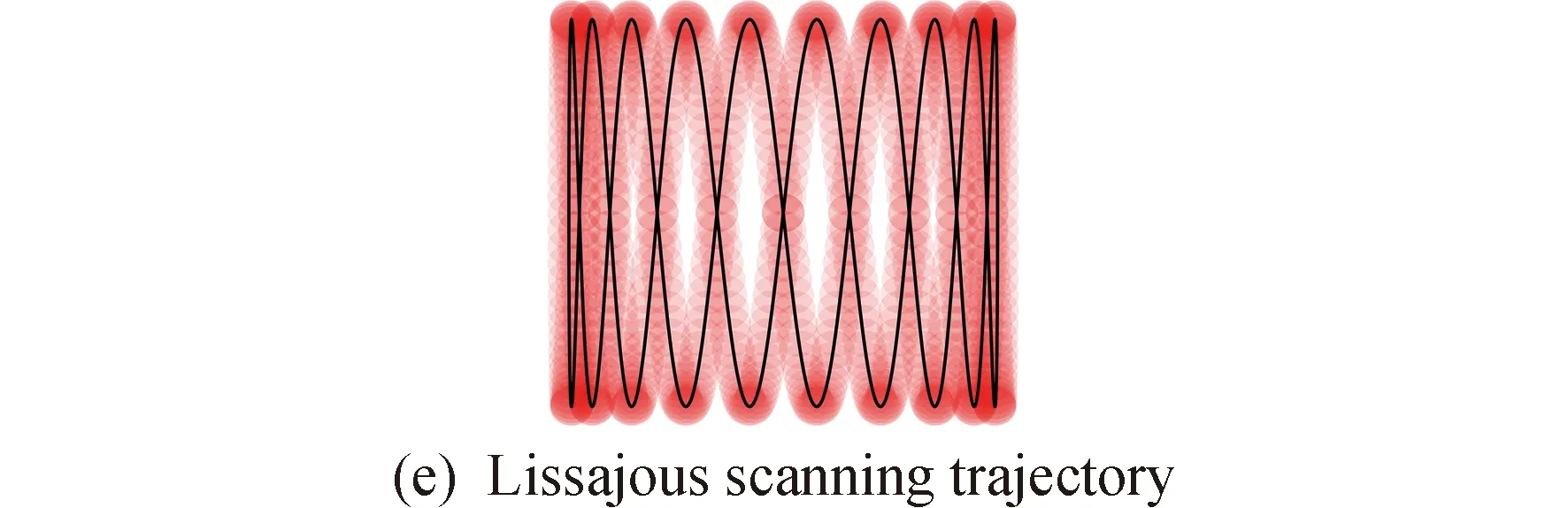
图2 常见扫描轨迹Fig.2 Common scanning trajectories
螺旋扫描轨迹如图2(a)所示,该轨迹的优点是效率较高,缺点是为了实现高覆盖率,相邻扫描光斑重叠区域较大,扫描光斑总数增多,扫描时间增长。光栅扫描轨迹如图2(b)所示,该轨迹的优点是在工程上易于实现,缺点是由于目标在不确定区域边缘出现概率较低,因此在扫描初期捕获目标概率较低。光栅螺旋扫描轨迹如图2(c)所示,该轨迹兼顾了光栅扫描和螺旋扫描的优点,覆盖情况良好,扫描效率较高;但该轨迹扫描光斑跳转次数较多,对执行机构的控制精度要求较高。
除了以上3种扫描轨迹外,常见的扫描轨迹还包括玫瑰形扫描和李萨如形扫描,分别如图2(d)(e)所示。但是这两种扫描轨迹在扫描过程中均存在漏扫区域,目前硬件实现难度较大[15],因此应用受到一定限制。
由于深空合作目标在不确定区域中心出现的概率较大,同时考虑到硬件上的实现难度和扫描轨迹的可重复性,在每个子区域内采用光栅扫描轨迹从子区域某个顶点开始扫描,如图3(a)所示。该种扫描轨迹的捕获概率和扫描时间将在第3.2、3.3小节进行详细分析。各个子区域之间则按照光栅螺旋扫描顺序进行,从目标出现概率最高的子区域开始扫描,如图3(b)所示。
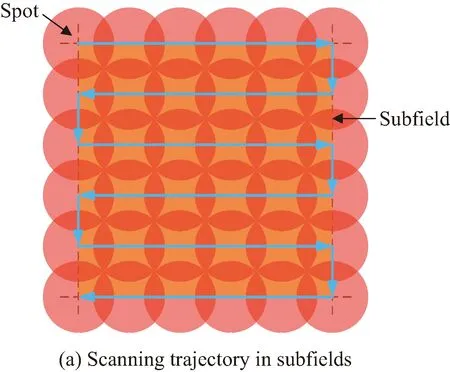
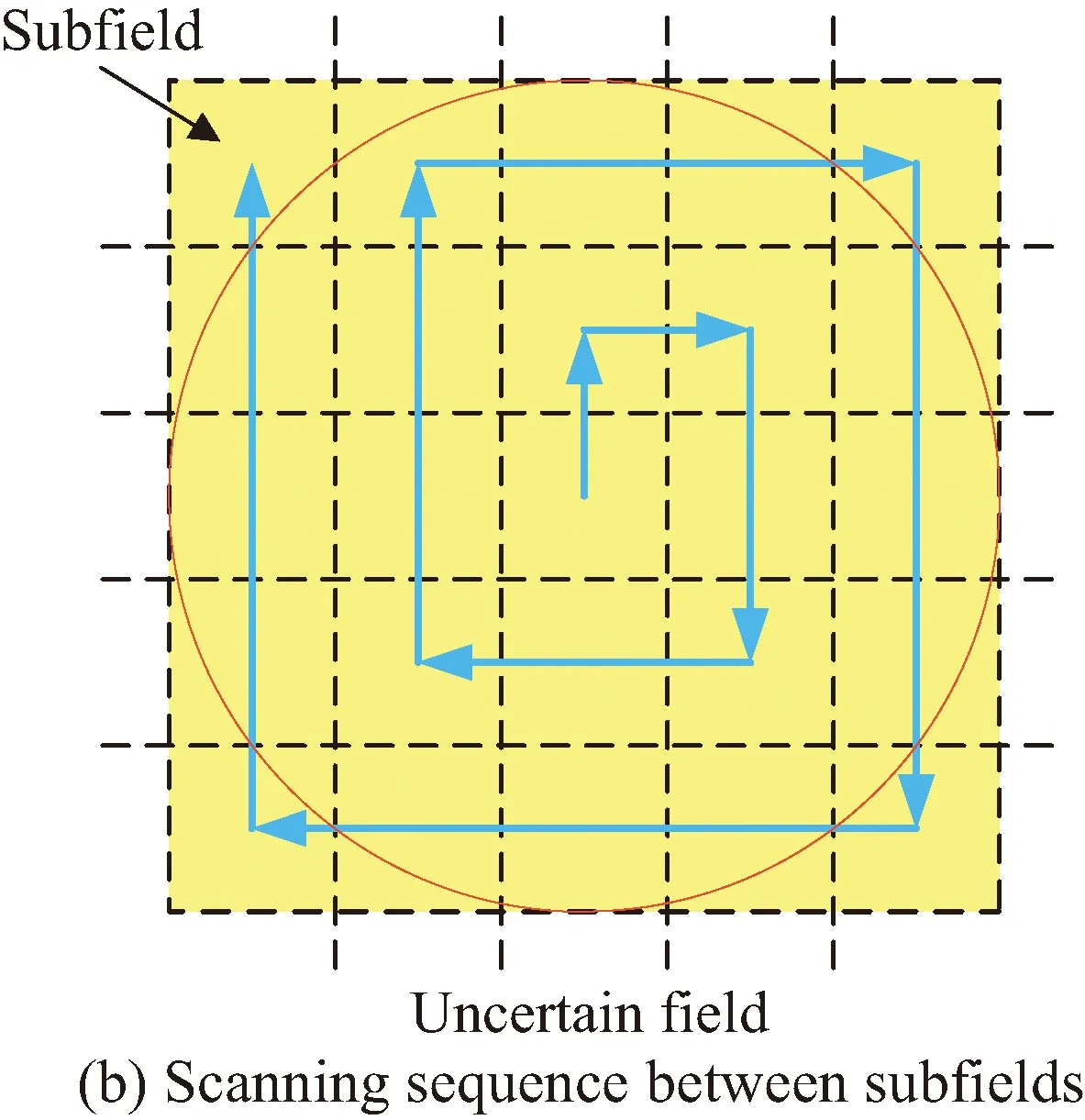
图3 不确定区域复合扫描策略Fig.3 Composite scanning strategy of uncertain field
3.2 捕获概率计算
在对合作目标进行扫描时,可根据星历对合作目标与近地航天器的标称相对运动进行补偿。此时对合作目标的捕获概率P为:
P=Pu·Pc·Pd
(1)
式中:Pu为不确定区域对目标的覆盖概率;Pc为扫描光斑对不确定区域的覆盖概率;Pd为扫描光斑覆盖目标时目标探测器的探测概率。下面将对不确定区域对目标的覆盖概率和扫描光斑对不确定区域的覆盖概率进行重点讨论,并对扫描光斑覆盖目标时目标探测器的探测概率进行估计。
(1)不确定区域对目标的覆盖概率
通常情况下,跟瞄系统视轴在方位、俯仰方向的偏置角是对称分布的,因此两个方向上的标准差相等,初始偏置角在径向服从瑞利分布,其概率密度函数f(θs)和对应的概率Pu满足[17]:

(2)
式中:θs为初始偏置角;σs为扫描光斑径向偏置角的标准差,由探测器姿态误差、探测器轨道预报误差和系统解算误差所决定;θu是不确定区域θFOU的一半。
将θu/σs整体视为一个变量,根据指数函数性质可知,当θu/σs较小时,Pu随θu/σs的增大而迅速增大;当θu/σs较大时,Pu仍随θu/σs的增大而增大,但增大速度逐渐降低,捕获概率Pu最终将趋向于1。根据工程经验,不确定区域与初始偏置角应当满足“3σ”要求,即θu/σs≥3。考虑到不确定区域过大会增加扫描时间且覆盖概率增加不明显,因此选择θu/σs=3,此时Pu=98.89%。
(2)扫描光斑对不确定区域的覆盖概率
扫描光斑对不确定区域的覆盖概率与光斑之间的重叠情况有关。在捕获过程中,跟瞄系统处于开环扫描状态,仅能按照设计的轨迹进行扫描,当扫描轨迹存在设计偏差或跟瞄系统机械振动、外界环境扰动引起视轴抖动时,均会导致对不确定区域的漏扫。

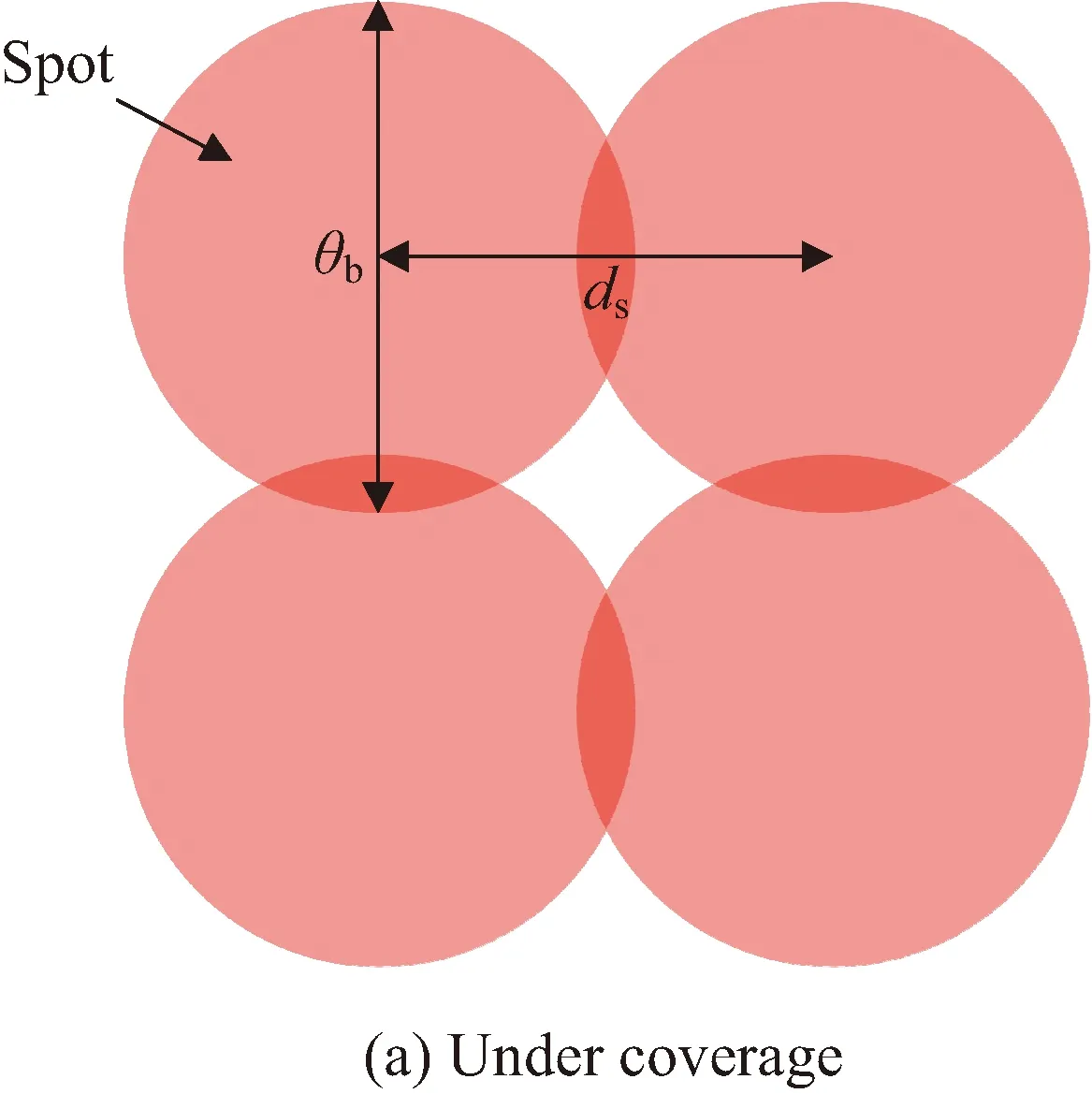
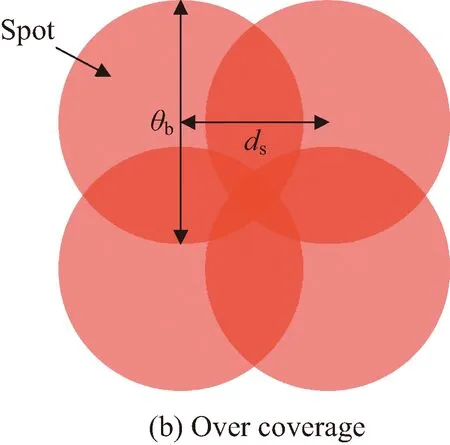
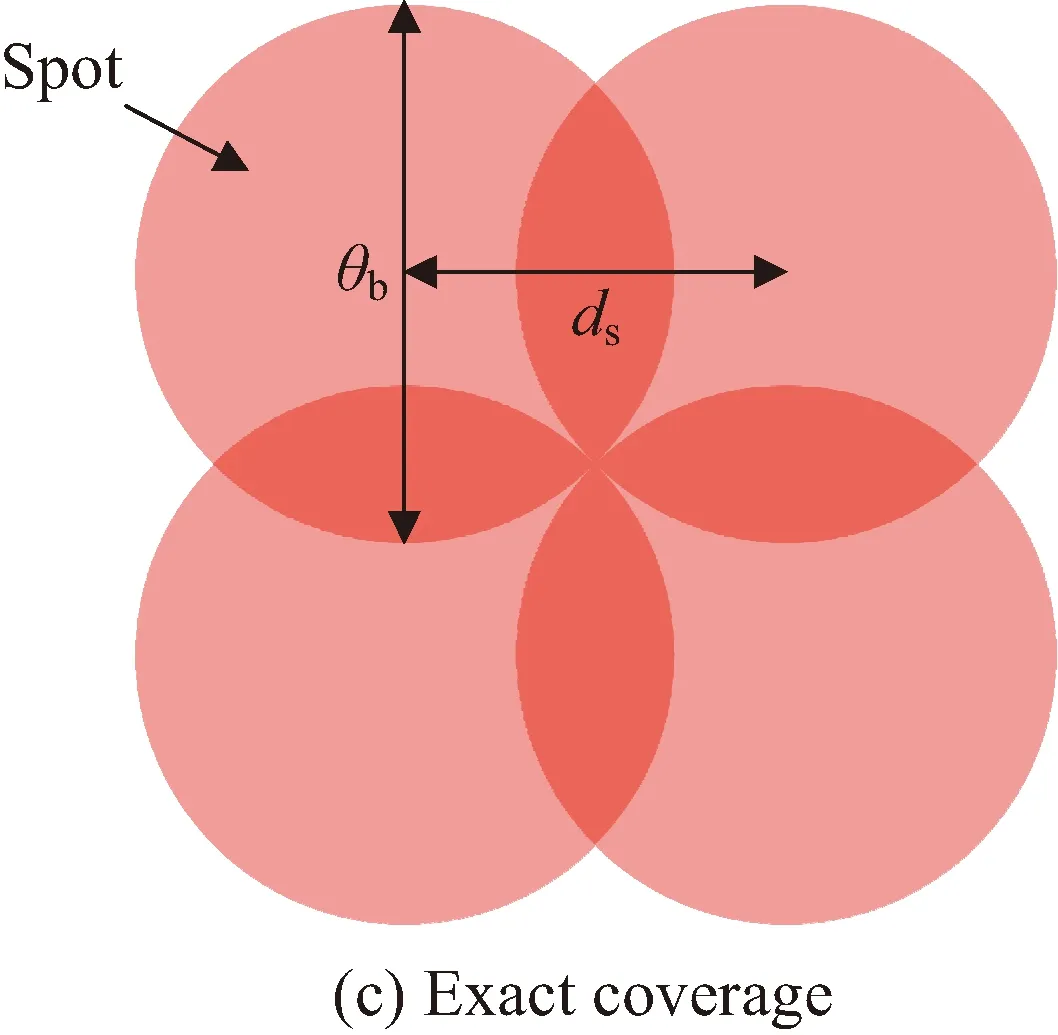
图4 光栅螺旋扫描不同伸缩因子对应的覆盖情况Fig.4 Coverage of raster scanning trajectory with different scaling factors
理想情况下,扫描光斑将按照设计的轨迹依次覆盖不确定区域,但由于执行机构机械振动、星上振动等因素的影响,跟瞄系统视轴会出现抖动,相邻扫描光斑重叠区域发生改变,可能导致部分区域的漏扫,如图5所示。
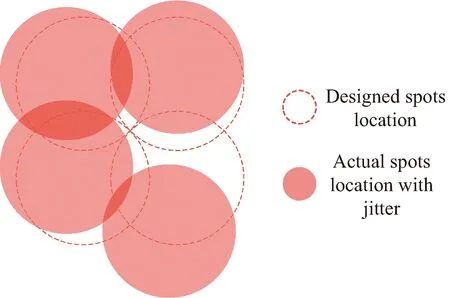
图5 抖动引起的不确定区域漏扫Fig.5 Leakage of uncertain field caused by jitter
视轴抖动可以通过抖动偏置角表示,在捕获过程中跟瞄系统视轴的抖动偏置角θj在径向上服从瑞利分布:
(3)
式中:σj为抖动偏置角的标准差。当抖动偏置角θj大于极限角2α时,相邻扫描光斑之间就会出现漏扫区域,因此扫描光斑对不确定区域的覆盖概率可以定义为[18]:
(4)
视轴抖动引起的重叠可以通过附加重叠因子k表征,附加重叠因子是极限角2α与激光束散角θb的比值,即k=2α/θb,k∈[0,1]。根据附加重叠因子与极限角的关系代入式(4)中,覆盖概率变为:

(5)
式(5)形式与式(2)类似,通过分析可知当σj/θb一定时,扫描光斑对不确定区域的覆盖概率Pc随附加重叠因子k的增大而增大,在k较小时Pc迅速增大,k越接近于1时Pc增长越慢。考虑到扫描光斑的过度重叠会显著增加扫描时间,因此k需要在综合考虑捕获概率和扫描时间的情况下进行优化选取。
(3)扫描光斑覆盖目标时目标探测器的探测概率
在扫描光斑覆盖目标且目标接收到的激光能量达到探测器阈值时,探测概率Pd由探测器本身的性能所决定。基于目前探测器所能达到的性能[18],选择探测概率Pd=0.99。此时,扫描方案对深空探测器的捕获概率可以表示如下,是一个含有附加重叠因子k的函数:
P=Pu·Pc·Pd=0.988 9×

(6)
3.3 扫描时间计算
复合扫描是伺服转台与快摆镜相结合的扫描模式,因此总体扫描时间为两种执行机构耗时之和,包括快摆镜在子区域内的扫描时间和伺服转台在相邻子区域间的切换时间。
(1)子区域扫描时间
快摆镜在子区域所需的扫描时间与扫描光斑数量、视轴从上一个扫描光斑跳向下一个扫描光斑所需的时间和视轴在每一个扫描光斑的停留时间有关。
扫描光斑数量一方面取决于子区域大小,另一方面与相邻扫描光斑中心距有关,其在方位、俯仰两个方向上子区域的数量为:

(7)

相邻扫描光斑中心距由扫描光斑重叠程度和扫描光斑大小所决定,其中相邻扫描光斑的重叠程度通过kf·(1-k)进行衡量,当k=1时,相邻两光斑完全重叠。因此在恰好完全覆盖的情况下,光栅扫描轨迹中相邻扫描光斑中心距满足:

(8)
根据光栅扫描轨迹,不确定子区域内方位、俯仰两方向上扫描光斑数量为:
(9)
式中:m1、n1分别为方位、俯仰两方向上扫描光斑数量。此时一个子区域内的扫描光斑数量nsp=m1×n1。
视轴从上一个扫描光斑跳向下一个扫描光斑所需的时间与执行机构的响应速度有关,在忽略快摆镜扫描加、减速时间的情况下,按照光栅扫描轨迹扫描一个子区域所需的时间t1为:

(10)
式中:tstay为视轴在每一个扫描光斑的停留时间,当跟瞄系统激光器功率一定时,tstay是一个固定值;fFSM为快摆镜的伺服带宽。
(2)相邻子区域切换时间
当一个不确定子区域扫描完成后,跟瞄系统视轴通过转台旋转跳转到下一个子区域,该过程所消耗的时间由转台伺服带宽所决定,即
(11)
式中:fRP为转台的伺服带宽。
(3)复合扫描时间
基于不确定子区域数量以及快摆镜扫描一个子区域所需的时间,可以得到扫描完整个不确定区域所需的时间Ttotal:

(12)
4 高概率捕获复合扫描策略优化
扫描时间、捕获概率是建链中的两个重要指标,根据式(6)~(12)可以看出,当附加重叠因子较大时,总体捕获概率较高,但过大的附加重叠因子会导致扫描步长太小,子区域扫描时间增加,总体扫描时间也随之增加。因此需要结合捕获概率、扫描时间建立合适的目标函数,对子区域大小和附加重叠因子进行优化,使得总体扫描时间较短的同时总体捕获概率较高。
根据扫描时间短、捕获概率高的任务需求,选取目标函数J如下:

(13)
式中:k1、k2分别为捕获概率和扫描时间的权重系数,可以根据不同需求进行适当调整;1/bnorm为缩放系数,该系数与时间、概率的最大值有关,这两个最大值可通过工程经验、物理意义进行估计。根据两个最大值的比例对缩放系数进行选择,使1/P与Ttotal取值在同一量级,有利于后续优化时缩短得到最优目标函数的时间[19]。
从式(13)可以看出,目标函数中包含了多个参数变量。并且由于取整运算的存在,目标函数具有非线性,难以得到解析解。考虑到遗传算法兼容性好,并且可以同时考虑多个参数的影响,因此选择遗传算法对目标函数进行优化,具体过程为:
Step 1:对子区域大小θsub和附加重叠因子k进行编码。将待优化参数视为一条染色体上的基因,选择适当数字串长度,采用十进制编码。
Step 2:进行初始化。确定种群数量NP和最大进化代数G,然后设置进化代数计数器g=0,并生成初始种群。
Step 3:种群个体评价。根据目标函数,对种群中每个个体的适应度进行计算。
Step 4:选择、交叉、变异运算。对种群进行选择、交叉、变异操作,保留适应度较高的个体,并在下一代种群中产生新的个体。
Step 5:再次计算适应度。在选择、交叉、变异操作后,再次计算新一代种群的适应度,并根据适应度进行排序,为下一次遗传操作做准备。
Step 6:设置终止条件判断。若g≤G,则g=g+1,并跳转到Step 3;若g>G,则将最大适应度个体作为最优解输出,并终止计算。
5 仿真验证
结合文献[17]对星间激光通信跟瞄系统参数进行了估计,如表1所示。基于表1中参数,对提出的高概率捕获复合扫描策略进行仿真验证。在遗传算法参数选取上,进化代数G=300,种群数量NP=50,交叉概率与变异概率分别为0.3、0.5。
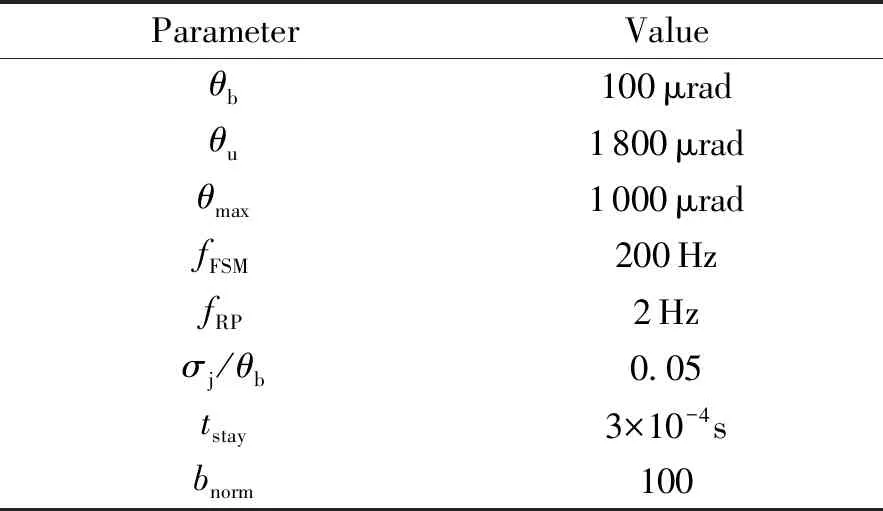
表1 仿真参数
目标函数优化曲线如图6所示。
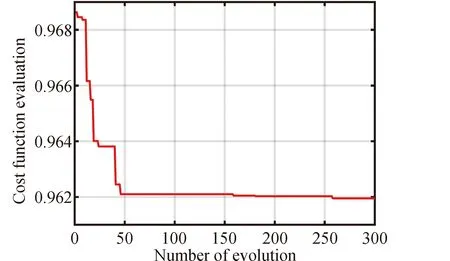
图6 目标函数优化曲线Fig.6 Optimization curve of cost function
根据图6可知,随着种群不断进化,目标函数逐渐降低,并在第258代达到最优目标函数值0.961 9。遗传算法优化前后相关参数对比如表2所示。
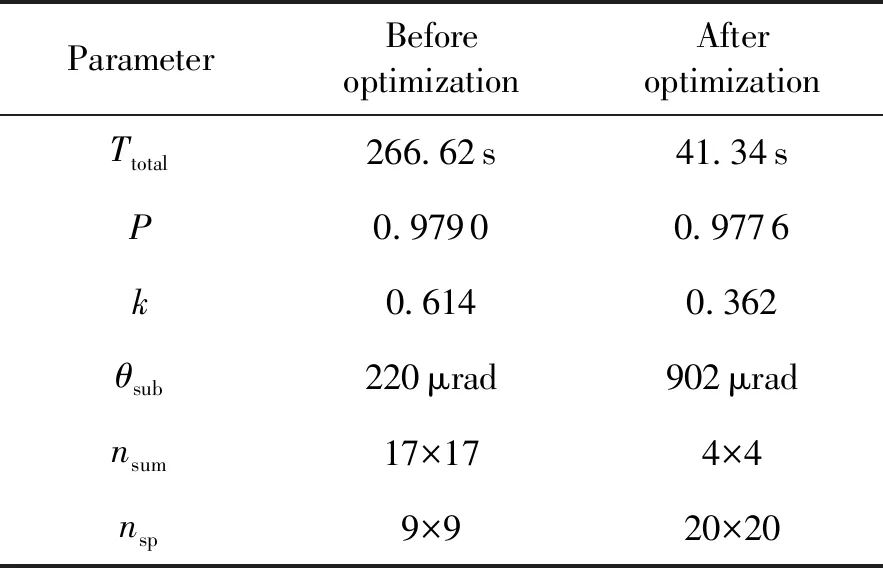
表2 优化前后相关参数对比
由表2可知,通过遗传算法优化,复合扫描方案在保持高概率捕获(优化前97.9%,优化后97.76%)的情况下,附加重叠因子明显减小,从0.614减小为0.362,因此对不确定区域的扫描时间也显著降低,从266.62 s下降为41.34 s,优化后的扫描时间是优化前的15.51%。
为了对捕获过程进行验证,按照式(2)概率随机生成合作目标位置并进行1 000次蒙特卡洛打靶,分别按照优化后复合扫描方案与光栅扫描方案进行捕获(这里指子区域内采用光栅扫描,子区域间按照光栅扫描顺序进行的方案),两种方案在子区域间的扫描顺序如图7所示,捕获目标次数、不确定区域扫描时间Ttotal、扫描到目标的平均扫描时间Tc等仿真结果如表3所示。
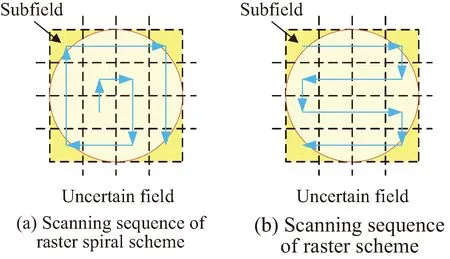
图7 不同方案子区域间扫描顺序Fig.7 Scanning sequence of subfields in different schemes
从表3中可以看出,两种方案均扫描到目标992次,并且对目标不确定区域的扫描时间均为41.34 s;但采用光栅扫描方案扫描到目标的平均扫描时间为20.61 s,采用复合扫描方案的平均扫描时间为9.62 s,仅为光栅扫描方案的46.68%。
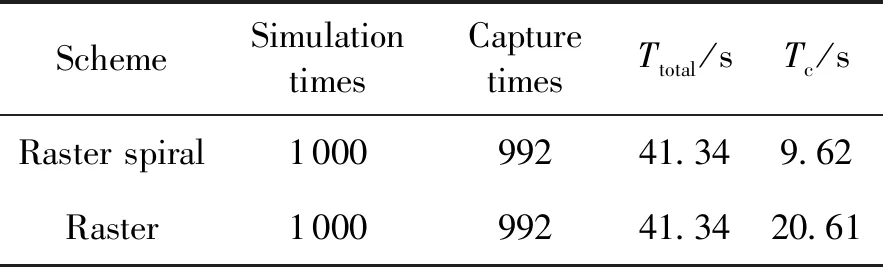
表3 不同方案仿真结果
6 结论
针对大不确定区域、小扫描光斑情况下的捕获问题,本文提出的复合扫描策略对目标位置不确定子区域大小、附加重叠因子进行了优化,得到了高捕获概率、短扫描时间的扫描方案。通过仿真对扫描方案进行了验证,仿真结果表明:
1)在该扫描策略下,目标位置不确定子区域大小均不超过快摆镜的最大扫描行程。
2)优化后的扫描方案可以在保持较高捕获概率的同时明显降低扫描时间。在目标位置不确定区域为3.6 mrad,激光束散角为100 μrad的情况下,优化前捕获概率为97.9%,优化后为97.76%,与优化前基本一致;但扫描时间明显降低,优化前扫描时间为266.62 s,优化后为41.34 s,下降为优化前的15.51%。
3)复合扫描方案与光栅扫描方案对目标的捕获概率相同,但扫描到目标的时间较短。在1 000次蒙特卡洛打靶中,两种方案捕获目标概率均为99.2%,但复合扫描方案扫描到目标的平均扫描时间为9.62 s,仅为光栅扫描方案的46.68%。
由于星上计算资源有限,后续考虑在优化部分将遗传算法与模拟退火算法、并行随机梯度下降算法等优化算法相结合,在保证优化精度的同时提高收敛速度,以便于该扫描策略在航天器上的实现。
