永磁辅助式同步磁阻电机自寻优控制及参数辨识
2022-07-15邱建琪曾汉史涔溦
邱建琪, 曾汉, 史涔溦
(浙江大学 电气工程学院,浙江 杭州 310027)
0 引 言
近年来,随着新能源汽车市场的快速增长,高性能、高功率密度、调速范围宽的牵引电机得到了行业的重视,其中以稀土永磁同步电机应用最为广泛。稀土永磁同步电机性能优异但成本较高,与之相比较,永磁辅助式同步磁阻电机(permanent magnet assisted synchronous reluctance motor,PMASynRM)可使用铁氧体磁钢,无稀土且磁性能要求较低,从而大幅降低了电机成本,虽然在功率密度和效率方面存在一定差距,但PMASynRM的凸极比高,弱磁性能好。可以预见,其将在新能源汽车牵引领域有着良好的发展应用前景。
新能源汽车牵引电机常采用最大转矩电流比(maximum torque per ampere ratio, MTPA)控制策略,确保在相同转矩输出的情况下电流为最小值,从而提高运行效率增加续航里程。MTPA控制需要获取电机参数,某些控制方法如模型预测电流控制(model predictive current control, MPCC)等也十分依赖电机模型参数的准确性。参数辨识能够解决额定参数失配问题,从而在不明显增加成本的情况下提高电机的运行效率。尤其对于PMASynRM而言,电机电感并非如同永磁同步电机一样在运行过程中波动较小,相反会随着电流变化剧烈变动,进而反过来影响电流。参数辨识是PMASynRM控制中非常重要的一环,但是目前国内外大部分研究都仅仅局限在恒参数控制仿真中,很少研究该电机的参数辨识问题。
国外方面,从21世纪以来,日本、韩国等多国学者已经制作了多款PMASynRM样机[1]。在控制领域也有了良好的进展,文献[2]利用反电动势的非正弦性将其五次谐波分量提取出来辨识Ld、Lq,并结合自寻优算法计算MTPA。文献[3]提出将直接磁场定向控制应用到其中。在直接转矩控制方法中,文献[4]则专注于磁通观测器构建,对反电势积分和电流磁模型分别串联和并联,确保了全速域内磁通观测的精确性。在传统直接转矩控制方面,文献[5]将MTPA引入滞环控制中,把原有的id、iq变换到磁通平面,实现了转矩脉动和磁通脉动的明显降低。在另一个高性能控制方法:磁场定向控制中,文献[6]使用了二阶电流滑模控制和混合查找表电流参考值发生器增加了系统在弱磁过程中的稳定性。
除了控制策略研究之外,国外学者对参数辨识的研究注重无位置传感器方法:文献[8]利用磁通观测器结合锁相环来提取磁通分量中隐藏的位置信息。考虑到在无速度或低速时磁通观测器的不稳定性,提出在d轴中注入脉动磁通以获得额外信息。文献[9]采用了滑模观测器提取出反电动势分量之后又用扩展卡尔曼滤波器提取其中的位置分量。文献[10]则专注于用扩展卡尔曼滤波器观测转速位置。
国内方面,永磁辅助式同步磁阻电机近几年间才得到重视,其中大部分内容主要集中在设计制造方面。就控制方面而言,文献[11]提出了基于无参数模型控制和最小二乘法参数辨识方法,克服了原来模型预测控制精度容易受到参数失配问题影响的缺陷,从而获得更好的自适应能力。文献[12]则利用改进型的滑模观测器进行无位置观测,具有良好的抗抖振性和动静态性能。文献[13]则建立了全速域的控制策略,在转矩预测的原有代价函数中加入MTPA。然而代价函数太过复杂且参数众多,不具备实用性。
本文提出基于改进自寻优控制的磁场定向控制,将电感对电流偏导加入自寻优控制中,避免自寻优控制中不能预测下一时刻电感而产生的电机失控问题,同时利用模型参考自适应进行电感参数辨识以确保MTPA控制和电流控制的精确性。为验证本文方法,电流环使用模型预测电流控制为例进行MATLAB/Simulink仿真,并且在dSPACE实验平台上进行实验验证。
1 PMASynRM数学模型
图1为PMASynRM转子结构和d-q轴位置定义,其中永磁体安装在磁障位置以饱和磁肋。
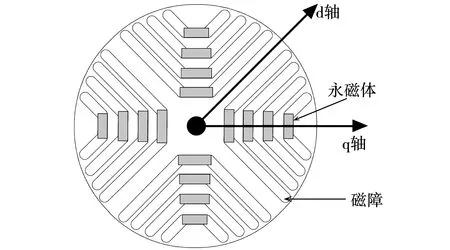
图1 PMASynRM转子结构
只考虑基波、三相对称情况以及忽略磁场交叉耦合、磁滞损耗等因素的影响时,PMASynRM在d-q轴旋转坐标系下的电压与磁链方程为:
(1)
式中:vd、vq分别为d、q轴电压;r为定子电阻;id、iq分别为d、q轴电流;Ld、Lq分别为d、q轴电感;ωr为电角速度;λm为转子永磁体磁链。忽略漏感等影响因素,理想情况下的电磁转矩为
(2)
考虑到自寻优策略中需要用到电流角,因此将其重写为电流角和电流幅值形式为:
(3)
式中:is为电流幅值;β为电流角。
2 MTPA控制策略与参数辨识
2.1 近似MTPA与普通自寻优控制策略
对于PMASynRM来说,磁阻转矩是电机转矩的主要部分。永磁体主要起饱和助磁作用,其产生的转矩占总转矩的10%左右,并且随着电流增加而占比进一步减小[2],如果忽略永磁体产生的电磁转矩。此时电机转矩为式(2)右侧第一项,给定电流幅值时,此时近似MTPA控制策略为
id=iq。
(4)
固定参数自寻优控制所用的代价函数为
(5)
此函数实际上就是在电流幅值固定情况下的转矩公式的一部分。
在给定了初始电流角的情况下,通过计算电流角左右两侧偏离一个小角度之后的代价函数值,选择其中最大者认为该电流角最优。下一次计算以该电流角为初始电流角继续迭代计算。当电流角稳定则认为此时处于MTPA轨迹上。
2.2 改进自寻优控制
然而将上述普通自寻优控制加入辨识参数时,出现了直轴电流给定变为最大,电机失去控制的情况。
从转矩公式(2)可以知道当控制策略切换时,id给定因为自寻优控制而增大,因为电感值与对应电流值为负相关的。直轴电流增大导致直轴电感减小,交轴电流减小导致交轴电感增大,则转矩公式第一项减小,转矩下降而非上升,而下一时刻时因为电感差值减小,自寻优控制给出的id给定将会进一步增加,iq给定会进一步减小,则电感差值会进一步减小。这种正反馈会一直存在直到电机失控。
其原因是:自寻优控制寻找到的是下一时刻最佳电流角,而此时辨识参数为此时刻电流对应的电感值,并不能预测下一时刻电流变化导致的电感变化,则使用式(5)进行下一时刻的转矩预测时,将会因为没有考虑电感变化而导致选择错误的电流给定。这是PMASynRM电流和电感相关性较大的特性导致的,单纯考虑电流变化产生的转矩变化不够全面。
综合上述分析,将电感对电流偏导(以下简称为电感偏导)引入辨识参数自寻优中。将偏离小角度的电流变化量通过该电感偏导变化为偏离小角度之后的电感变化量。将更新的电感值代入代价函数中,则能够更准确预测下一时刻转矩的变化,从而使自寻优控制能够收敛到实际MTPA轨迹上。提出的改进自寻优控制如图2所示,变化后的代价函数为
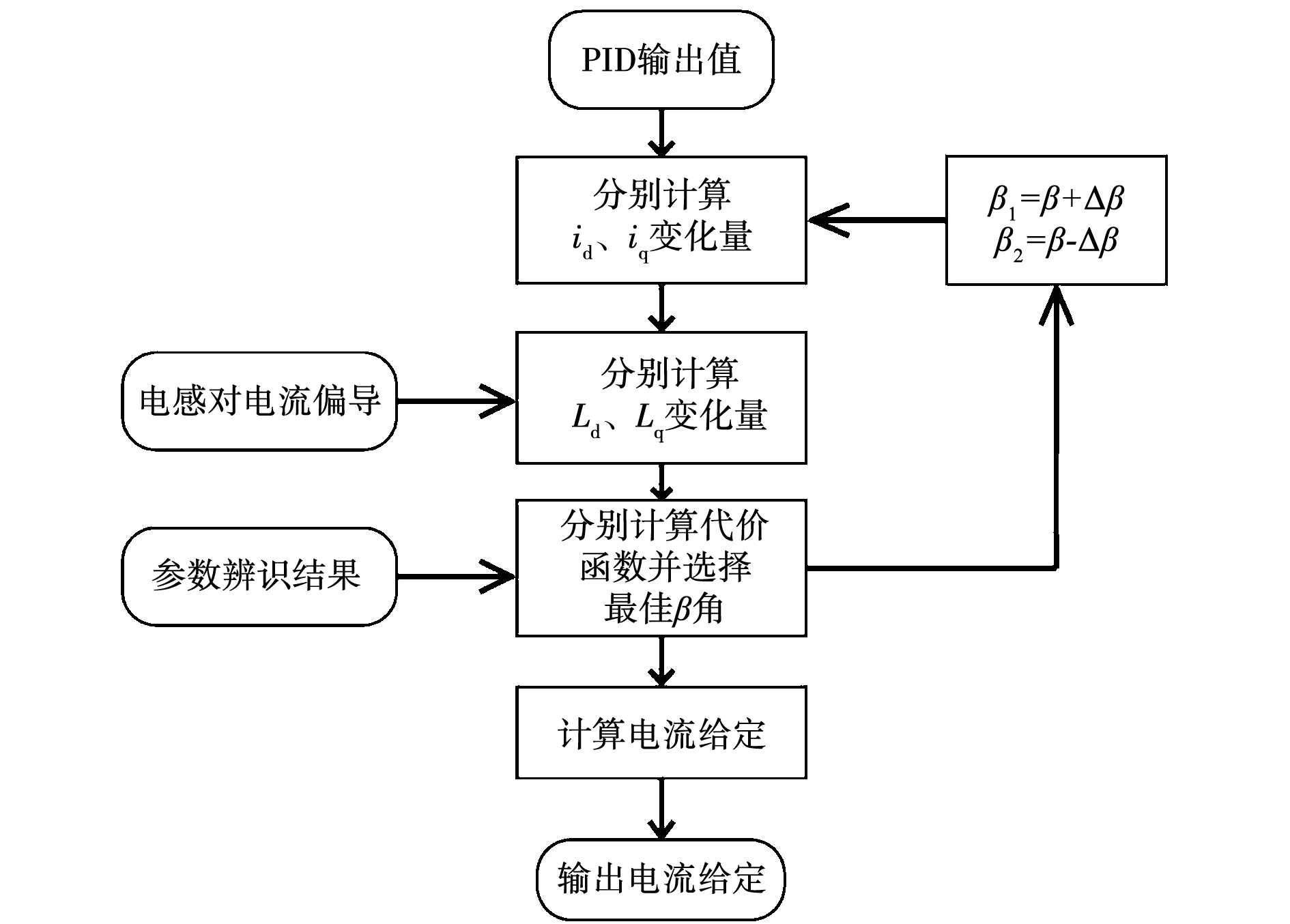
图2 改进自寻优流程图
G=(Ld+ΔLd-Lq-ΔLq)(id+Δid)(iq+Δiq)+
λm(id+Δid)。
(6)
2.3 PMASynRM的POPOV超稳定性理论自适应律设计
对于PMASynRM,电感随电流剧烈变动是参数辨识的一大难点。不同于永磁同步电机,电感波动会极大影响电流预测从而导致参数辨识失败,因此加入限幅以防止电感过零产生无穷大量。
以实际电机为参考模型,设计可调模型为:
(7)
如果一个系统满足POPOV超稳定,则必须要满足两个前提:第一,系统前项通道的线性部分传递函数H(s)严格正实;第二,系统非线性部分输入输出满足POPOV不等式。即满足如下条件:
(8)
对于第一条而言,根据正实引理,如果存在正定对称阵P和Q使得下式成立,则H(s)严格正实,即
(9)
可知令P为单位阵,C为单位阵,考虑A为负定矩阵,则必存在正定对称Q使得H(s)严格正实。接下来设计参数自适应律以满足第二条不等式。令参考模型和可调模型相减得到误差的状态空间表达为:
(10)
此时可以知道POPOV不等式可以写为
(11)
当预测量满足条件:
(12)
其中α为某个大于0且小于Ld、Lq的固定数值,可以确定ΔA在任意时间内值都为有界量,考虑到误差和预测电流都为有界量,因此有界量的乘积在有限时间内的积分必然为有界量。
设电感形式为:
(13)
由下式可知结果必然为有界量r2,将式(13)代入式(11),结合上文知POPOV不等式必然成立,即
(14)
综合上述推导可知,参数辨识模块中所用的公式为式(13),同时需要加入式(12)进行限幅。
3 控制系统说明
为了验证本文提出的自寻优控制与模型参考自适应参数辨识方法,在Simulink中搭建了相关仿真模型进行仿真分析并且进行了实验。参数如表1所示,仿真与实验所用控制系统如图3所示。

表1 仿真用参数
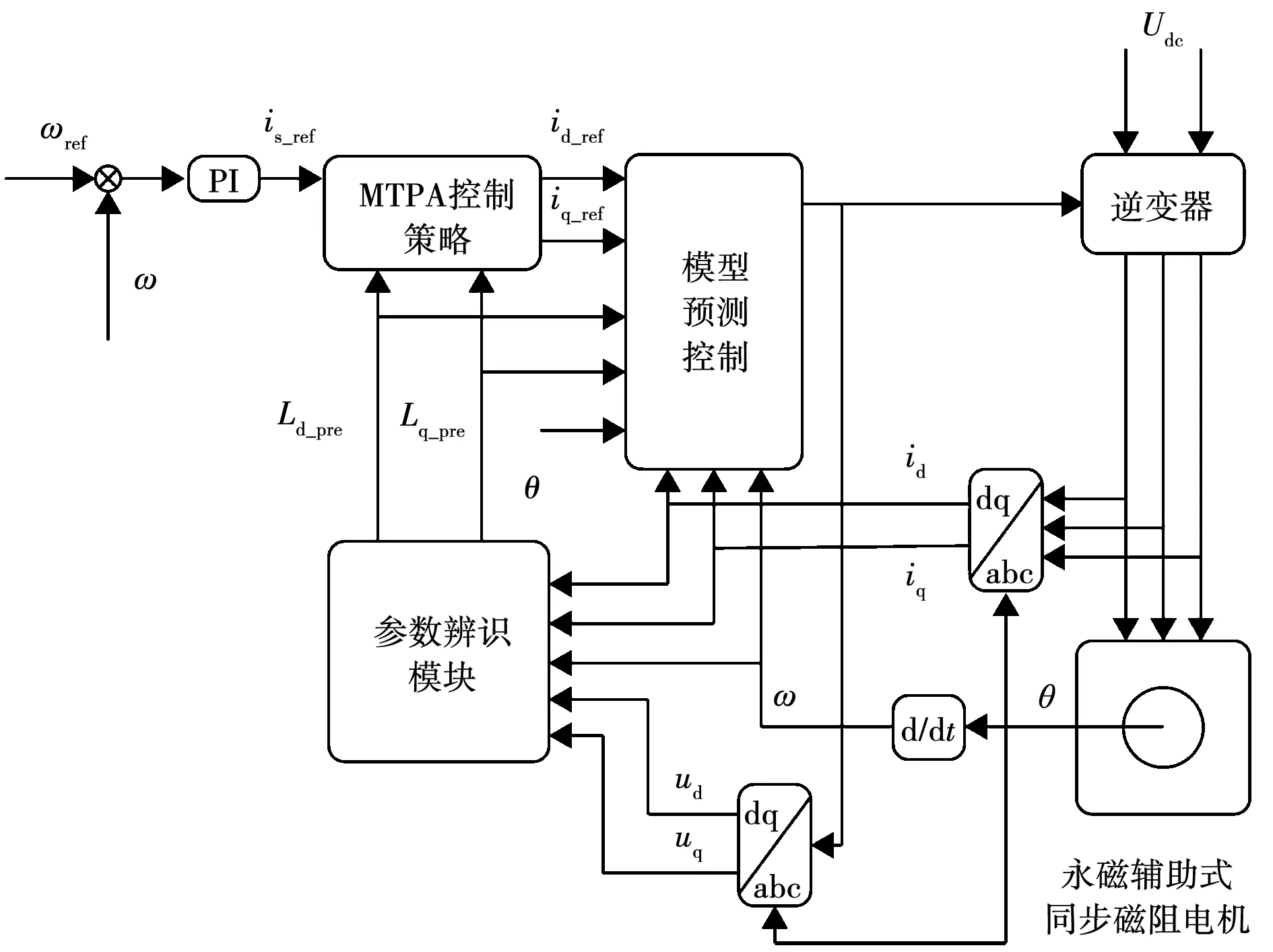
图3 控制系统示意图
速度参考值和真实值之差作为PI控制器的输入,输出为转矩给定,考虑到在一般情况下,转矩给定与电机电流幅值成正相关,则该值在工程上也可以被当做电流幅值给定送入MTPA模块中。该模块根据控制阶段不同分别使用改进型自寻优和id=iq两种不同控制策略。
实际电流和电压给定通过参数辨识模块后得到辨识后的电感值,其中应用了POPOV自适应律即式(12)、式(13)。MTPA模块输出的电流给定、实际电流、参数辨识结果一同输入模型预测控制模块中,该模块根据电机的数学模型式(1)预测8个电压开关量分别对于电流的影响,从中选择最佳电压开关量直接输出逆变器。该模块代价函数为
G=(id-id_ref)2+(iq-iq_ref)2。
(15)
4 仿真验证
为了验证参数辨识的正确性与跟踪性能,实验中分别在3、4.5 s时加入了d、q轴电感突变。
仿真中设定速度参考值为600 r/min。因为仿真中电感对电流偏导为0,不能使用改进自寻优方法,因此电流给定采用近似控制策略。
仿真系统运行之后的参数辨识效果如图4所示。电感突增时预测参数也能准确跟踪实际参数的变化,而且超调较小,预测误差在1%左右,而收敛时间在0.4 s左右。图5展示了参数辨识过程中预测电流和实际电流的误差情况。预测电流收敛到了正确值,电流误差趋近于0。
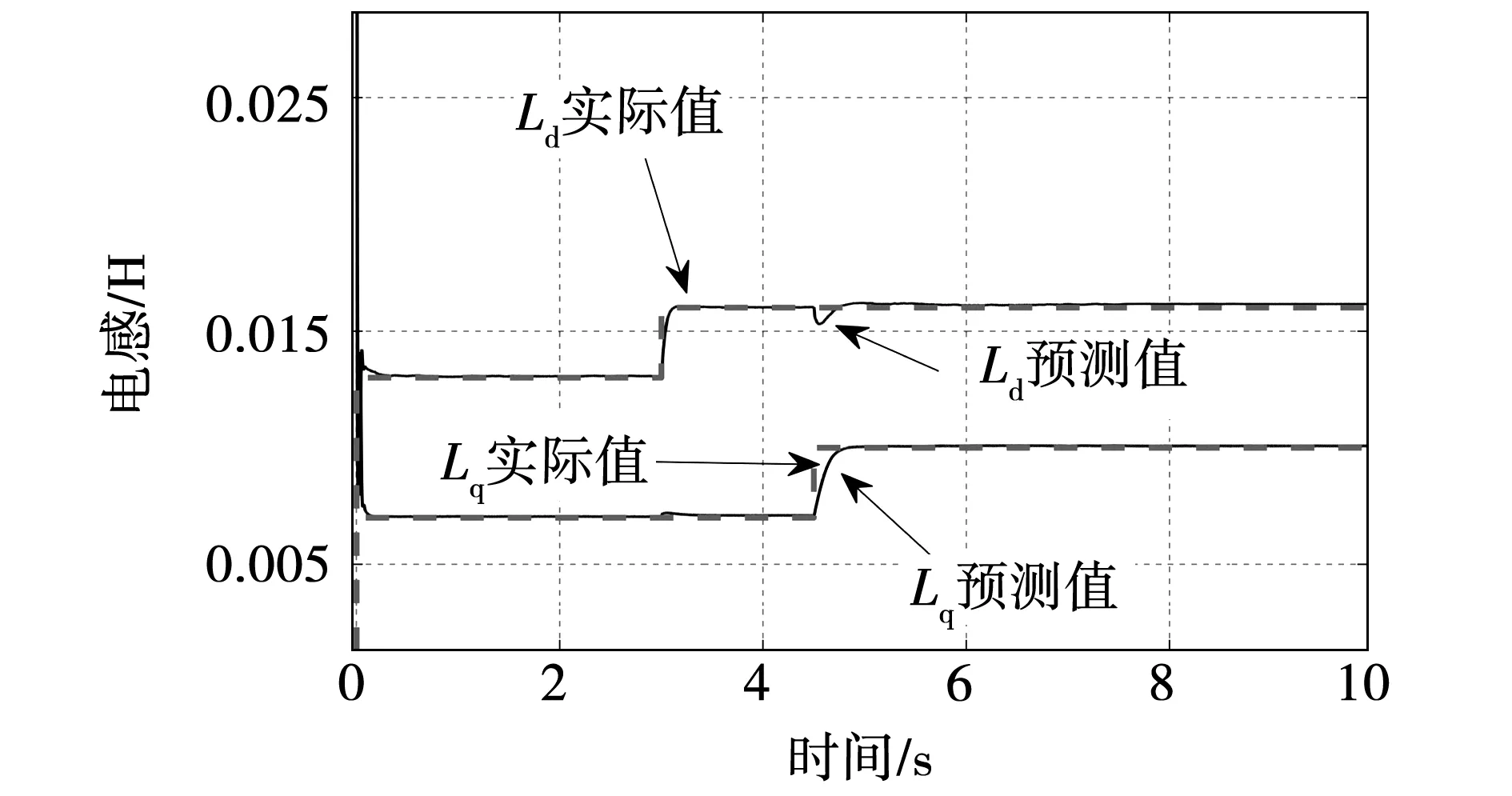
图4 参数辨识效果
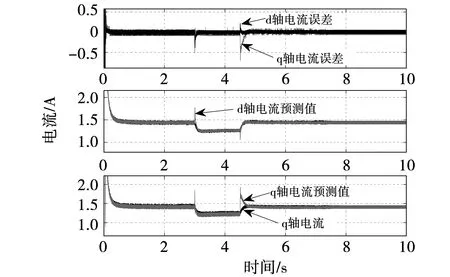
图5 预测电流与预测误差
5 实验验证
为了进一步验证本文所提控制方法的控制性能,使用dSPACE实验平台进行电机实物实验,实验中的电源采用了30 V直流稳压源,通过三相两电平电压源型逆变器为电机供电。
实验平台的采样周期为50 μs,实验电机以同轴相连的方式拖动永磁同步发电机,负载电机电流经过二极管不控整流后流经功率电阻作为负载。取电感偏离实际值15%以模拟电机参数失配情况。
图中启动阶段Ⅰ电感参数来自辨识,MTPA控制轨迹由自寻优所得,然后是电感参数为固定值,MTPA控制轨迹由自寻优所得的阶段Ⅱ,接着是电感参数固定,MTPA控制轨迹采用id=iq近似控制的阶段Ⅲ,最后是电感参数来自辨识值,采用id=iq近似控制阶段Ⅳ。各阶段均在图中以Ⅰ、Ⅱ、Ⅲ、Ⅳ标注在上方,并以虚线分隔。
整个实验过程没有中断或者变化参数,在同一个实验周期内分别测试了四种不同情况。因此可以认为实验条件完全一致。
5.1 空载情况分析
电机以600 r/min空载启动的速度波形如图6所示,可以看到因为切换控制策略(6.44、9.91、15.22 s),转速有所波动,但回归到了额定转速。考虑机械时间常数远大于电气时间常数,因此可以认定回归额定转速后的电流电感等为稳态值。图7为空载600 r/min电流变化。
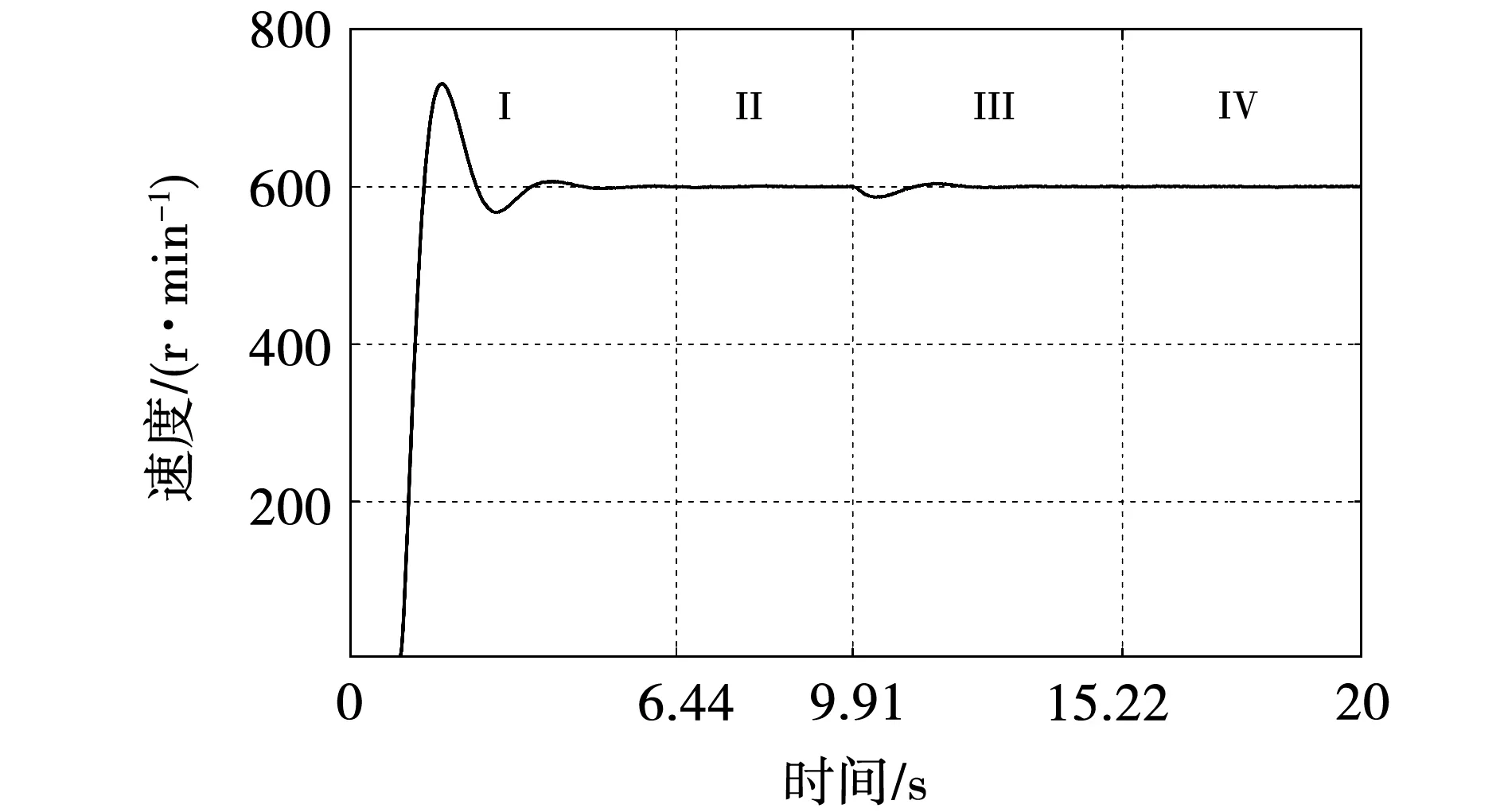
图6 空载启动速度变化
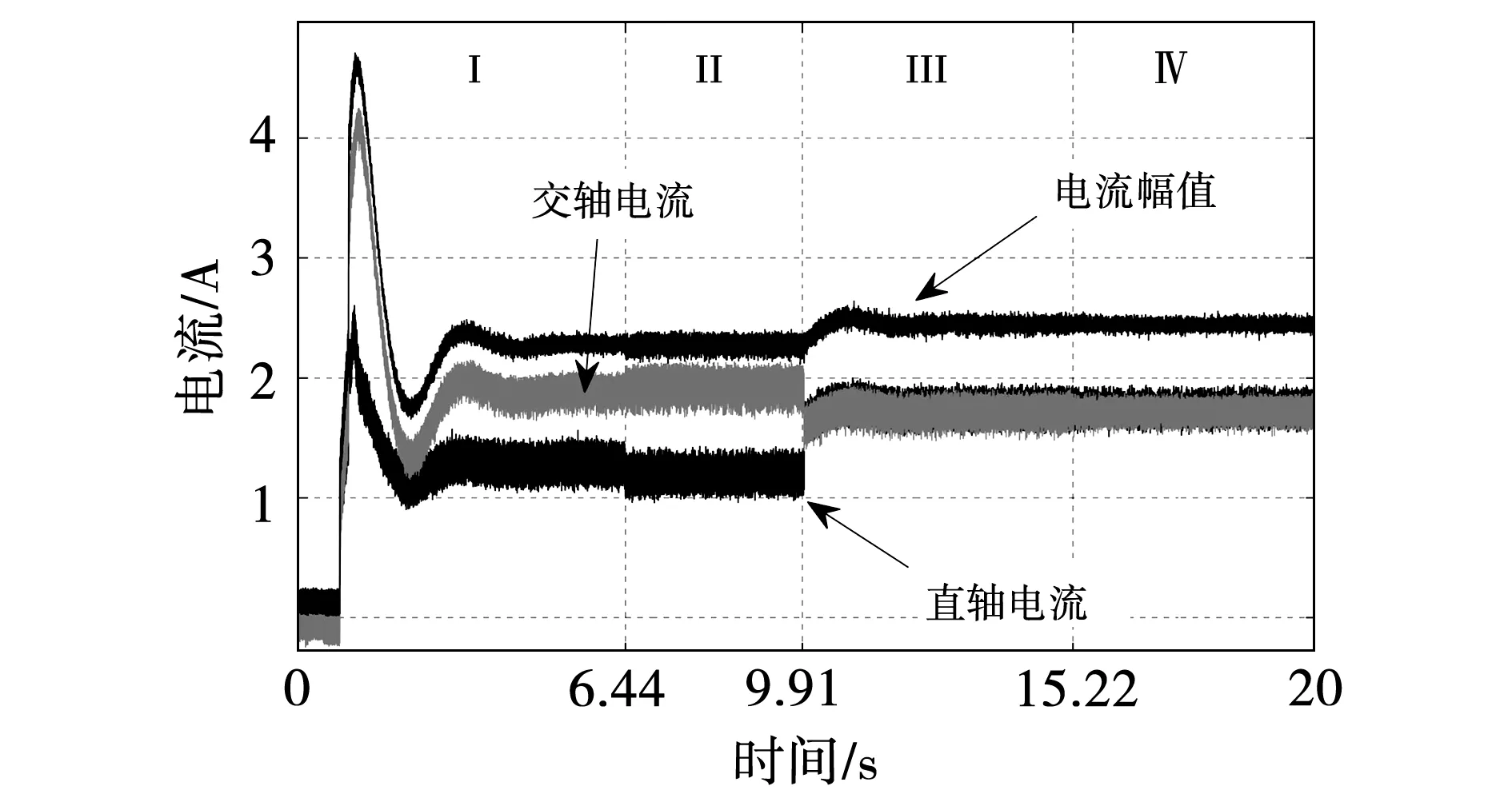
图7 空载600 r/min 电流变化
电感辨识过程如图8所示,可以看到在初始值和实际值相差巨大的情况下,仍然能够稳定收敛,并且超调量很小。当切换电机控制策略时,因为实际电流改变,电感辨识值也会随之改变,整体上与电流幅值成反比。当固定参数且使用近似控制(id=iq)时,可以看到辨识的交直轴电感值为13.3、7.7 mH,与有限元法计算值13.0、7.6 mH相比非常接近。

图8 空载电感辨识
四种控制方法总结如表2所示。可以看到自寻优和id=iq控制策略的区别主要在于电流幅值下降。使用自寻优之后同样转速下需要的电流仅为之前电流的93%。从图7中看到当10 s控制策略切换时,电流幅值有了明显增加。该点也可以通过图6中,该时刻转速明显下降看出,当电流幅值不变时,自寻优相比近似控制能够产生更大的转矩。
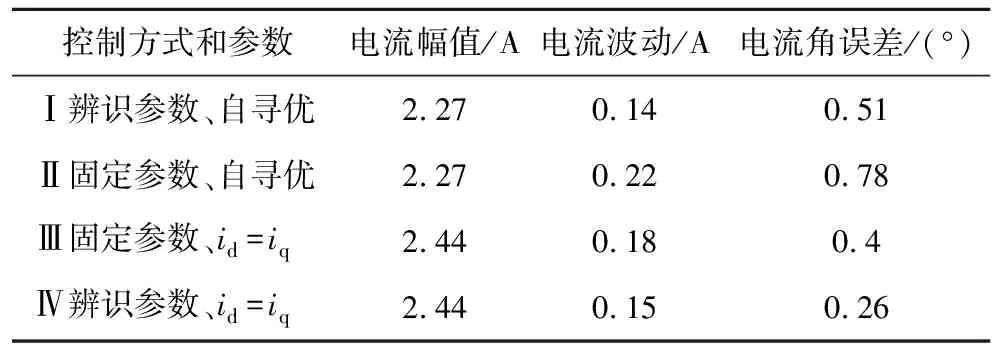
表2 空载电流对比
因为电流环中采用的MPCC控制需要电感来预测下一时刻电流从而找到最佳开关量,因此辨识参数相比于固定参数能使其电流波动减小和对电流给定的跟踪更精确,实验结果也证明其电流波动和电流角误差都减小了超过17%,其中电流幅值误差更是减小了超过50%。图9为空载电流角变化。

图9 空载电流角
5.2 带载情况分析
带载实验过程同空载一样,同样分为4个阶段应用不同的控制策略,转速同空载一样都回归到了额定值。电感辨识过程如图10所示,同样实现了在初始值和实际值相差巨大的情况下,仍然能够稳定收敛,并且超调量很小。相比于空载情况,由于电流增大,电感值也相应减小。图11为电流幅值变化情况。
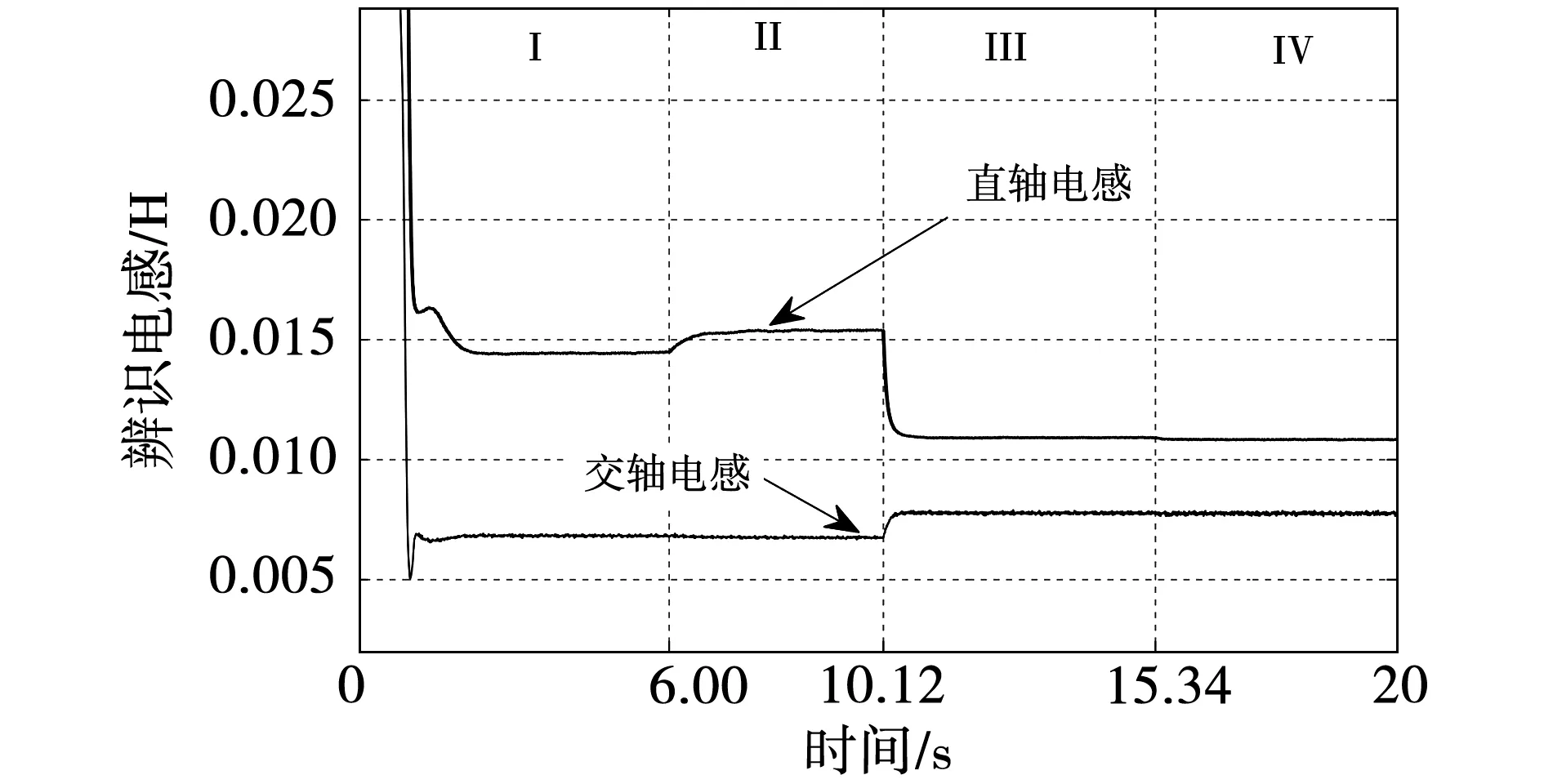
图10 带载Ld、Lq辨识
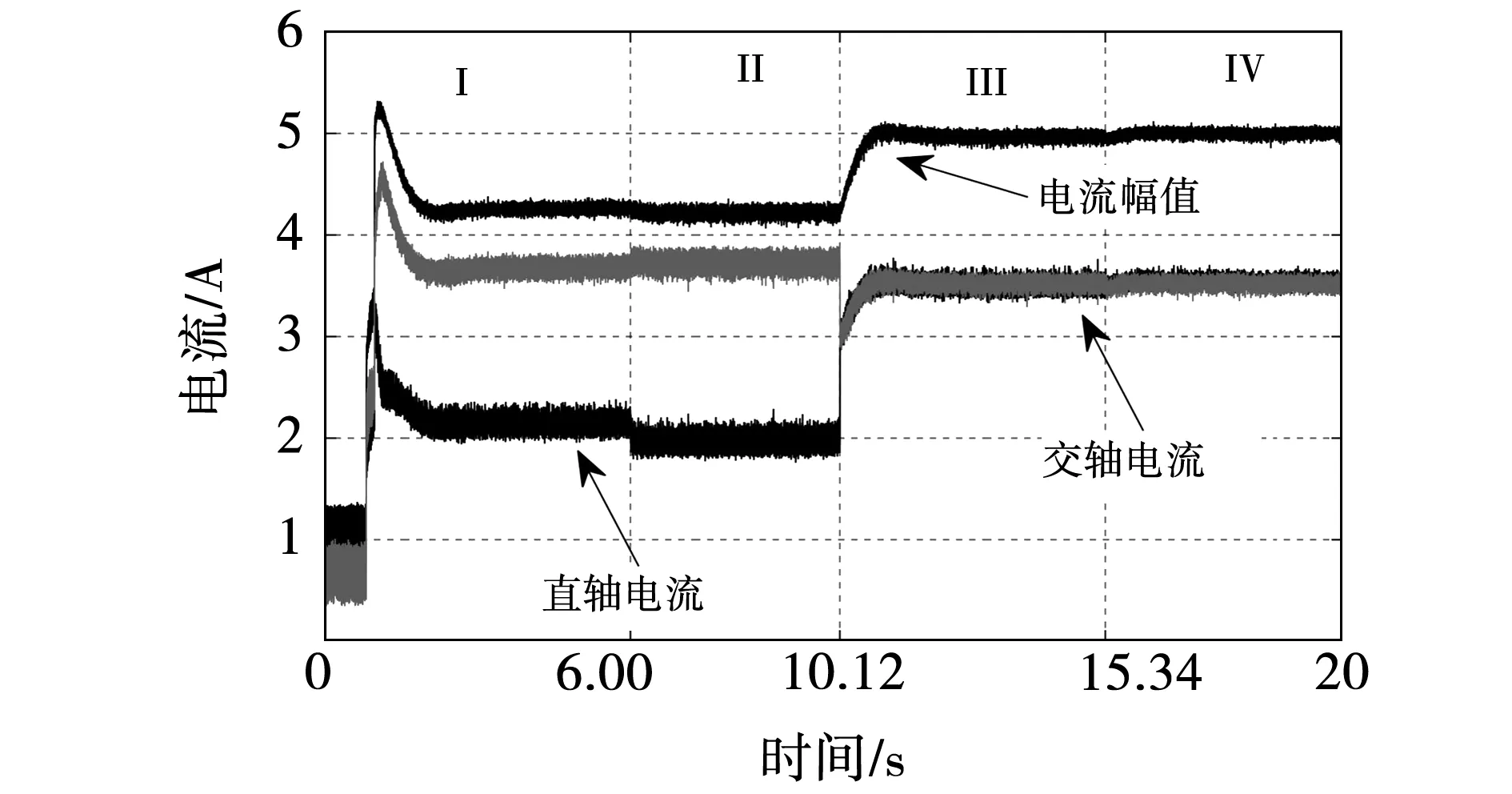
图11 带载电流对比
如图12所示,当自寻优启动之后,角度飞速上升到60°左右,可以看到整个动态变化过程中给定电流角变化近乎于直线,自寻优响应速度非常快。实际角度值能够跟随给定角度值的变化,可以看到此时交轴电流给定大于直轴电流给定,如果将电感看作是固定值不引入电感偏导和参数辨识进行修正的话,角度值应该小于45°,此时电流幅值将大于改进自寻优控制。从图12中可以看到,改进自寻优相比与近似策略能够减少15%左右的电流幅值。
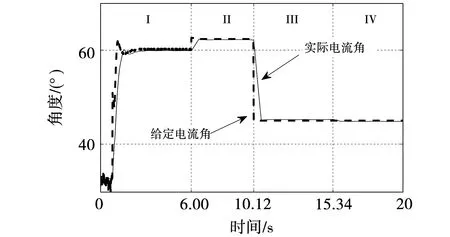
图12 自寻优角度变化
因为电流环模型预测控制的参数失配问题,实际值与给定值之间有着稳态误差,而辨识参数被用在MPCC中,可以看到电流幅值稳态误差减少,电流波动也减少了13%,电流幅值误差减少了超过70%,结果如表3所示。
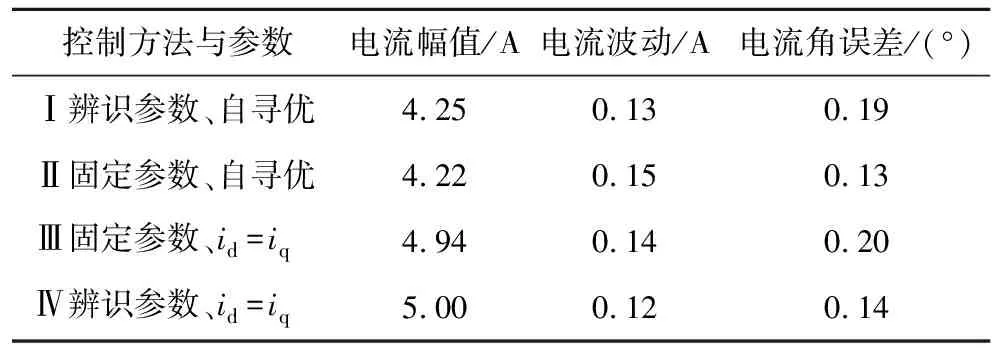
表3 带载电流对比结果
6 结 论
本文通过将电感偏导引入普通自寻优中,克服了普通参数自寻优不能预测电感导致PMASynRM失控或电流给定偏离MTPA轨迹的问题,使用参考模型自适应辨识电感参数从而改善了电流波动和电流误差。
仿真与实验结果证明,相比于传统固定电机参数的方法,本文提出的方法在没有明显提升硬件成本的基础上能稳定跟踪电机参数变化,减少了固定参数导致的稳态误差,减小了电流幅值从而提高了效率,降低电流波动与控制误差,具有较好的应用前景。