基于GRNN网络自适应滤波的钻具加速度去噪
2022-07-13仝小森杨金显
仝小森,杨金显
(河南理工大学 电气工程与自动化学院,河南 焦作 454000)
随着近年来对地下资源勘探研究逐渐增多,随钻测量技术[1](Measurement While Drilling,MWD)在石油、煤炭开采及各种地下钻通等方面得到了广泛的应用。MWD系统可在线实时测量钻具的重力信息,通过编码解码将姿态信息传输到地面,由解算出的井斜角、工具面角及方位角信息观测井眼的钻进轨迹。由于勘探开发逐步向深层、低渗透、海洋深水等非常规领域发展,尤其是随着深井、超深井、定向井、水平井、大位移井的增多,钻井过程中的振动问题已经成为钻头、钻柱等工具先期失效的主要原因[2]。因此,去除钻具振动噪声,获取准确姿态信息至关重要。
文献[3]采用改进自适应阈值小波算法对电机振动信号去噪,提高了信噪比。文献[4]采用最小均方(Least Mean Square,LMS)自适应滤波方法对近钻头振动信号进行滤除,提高了钻具姿态的测量精度,但LMS算法对钻进中非平稳信号适应性较差。文献[5~6]针对旋转导向系统有色噪声,建立了三轴加速度噪声模型,并利用四元数理论构造观测方程和时变状态方程,通过无迹卡尔曼滤波(Unscented Kalman Filter,UKF),利用时变状态方程更新观测方程,有效滤除了加速度计数据中的有色噪声,但该方法只考虑了横向振动影响。文献[7]提出抗差自适应滤波的导向钻具动态姿态测量方法,对异常信号抗差估计模型进行自适应因子调整,减小了钻头振动引起姿态解算误差。文献[8]将LMS自适应滤波算法用于延时估计,提高了系统抗噪性能,但LMS算法收敛速度慢,估计精度低。文献[9]采用递推最小二乘(Recursive Least Squares,RLS)与互补滤波器有效降低了陀螺噪声,提高了姿态估计精度。文献[10]采用阿伦方差对随机误差辨识,将建立自回归滑动平均模型的有色噪声作为系统状态方程的控制项,通过改进解耦自适应卡尔曼滤波算法来提高噪声补偿的效果。文献[11]提出了一种基于经验模态分解(Empirical Mode Decomposition,EMD)和改进的递归最小二乘去噪方法。该方法将光纤陀螺输出分解为多个固有模态函数,根据马氏距离将模态操作分为噪声模态、混合模态和信息模态3部分,然后采用改进的RLS算法对混合模型进行处理,并对改进后的模型进行重构,得到最终的去噪结果。文献[12]提出了一种稳定快速横向递归最小二乘算法,用于自适应滤除井下非稳态电气干扰。文献[13]将广义回归神经网络(Generalized Regression Neural Network,GRNN)和卷积神经网络(Convolution Neural Network,CNN)相结合进行图像识别,并与其他方法进行实验对比。该研究的实验结果表明 GRNN网络提高了图像识别率,具有较好的实时性。
由于地下环境复杂多变,钻具钻进过程中振动等问题导致解算的钻进轨迹与实际值之间存在较大误差。本文针对随钻测量过程中钻具底部振动引起的重力加速度信息严重失真的问题,提出采用GRNN网络和自适应滤波相结合的方法去噪,改进了递推最小二乘法计算的问题,也提高了重力加速度提取的精度。
1 钻具加速度计测量单元
MWD钻具姿态测量坐标系如图1所示,钻具的姿态测量是借助重力加速度在各个测试轴上的投影来实现的[14]。
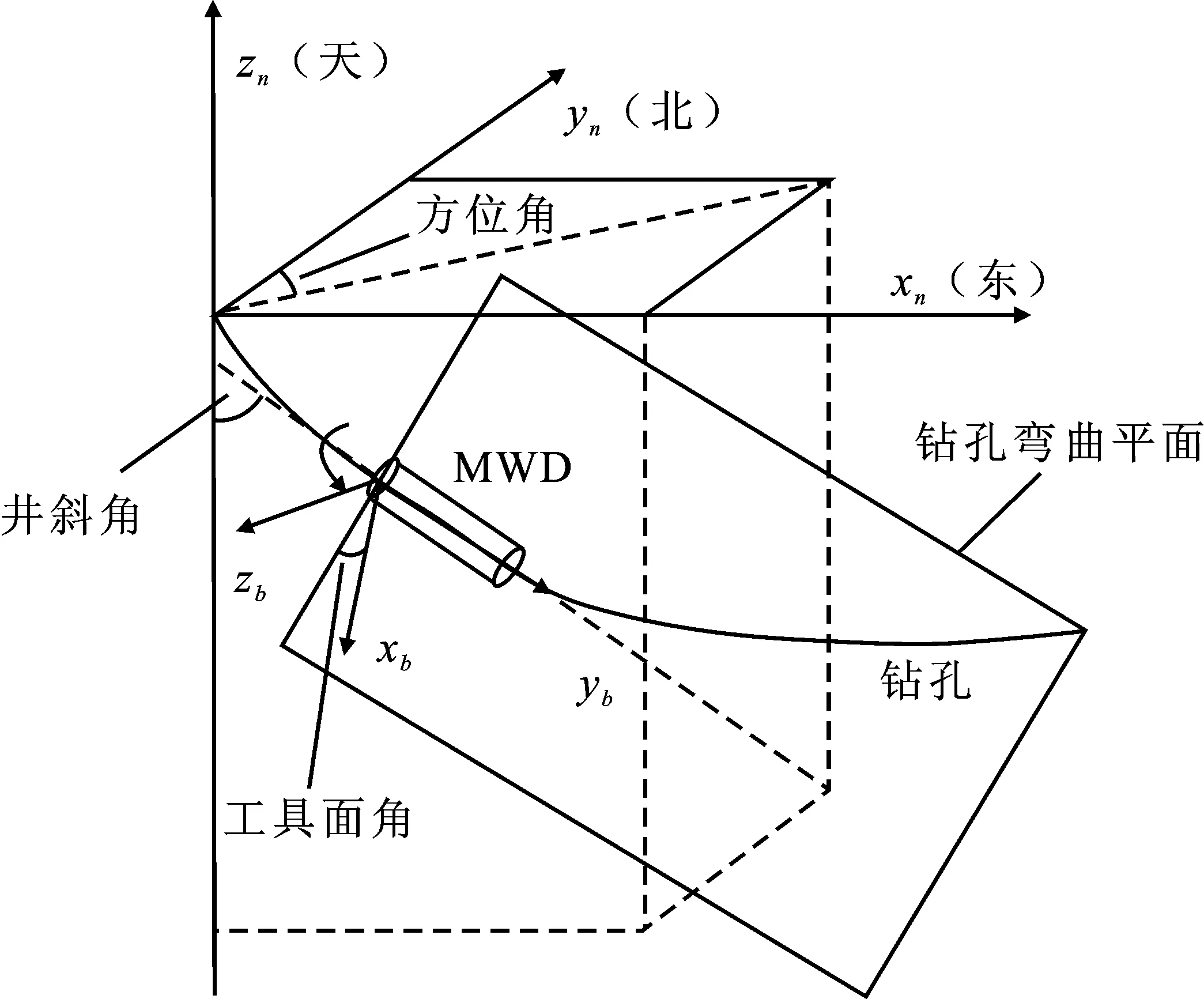
图1 MWD钻具姿态测量坐标系

(1)

(2)
(3)
解算出井斜角θ及工具面角γ为
(4)
由式(4)可以看出,井斜角、工具面角由重力加速度解算求得。重力加速度提取精度对钻进轨迹的确定至关重要,因此MWD钻具姿态信号的真实性和无噪声干扰具有重要的意义。
2 加速度计去噪理论
MWD钻具钻进过程中,钻头做变加速运动,钻具在旋转运行过程中带来了振动噪声。近钻头振动信号具有振幅大、频率高的非平稳特征。RLS在提取信号时,收敛速度快,估计精度高且对非平稳信号的稳定性好,可以明显抑制振动加速度的收敛过程。随着测量次数增加、校正次数增多,RLS方法估计值更精确,去噪效果更加明显,同时也缩小了储存空间[16],但RLS算法的计算复杂性高,实时性较差。GRNN具有较强的非线性映射能力和学习速度,能够有效提高时间效率。为有效提取钻具的重力加速度,获取实时准确姿态信息,本文将GRNN网络与RLS自适应滤波相结合来提高去噪效果。
钻具加速度计测得的加速度信息包括重力加速度、振动加速度及测量噪声,可建立模型为
(5)

2.1 GRNN网络
GRNN网络由径向基网络层和线性网络层组成,理论基础为非线性核回归算法。GRNN神经网络有输入层(Input Layer)、模式层(Pattern Layer)、求和层(Summation Layer)及输出层(Output Layer)构成[17],结构如图2所示。
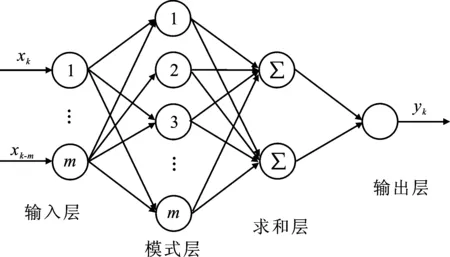
图2 GRNN神经网络结构图
输入信号Xk为
(6)
式中,T表示转置运算;m表示输入神经元个数,也为滤波器个数。输入层神经元个数与模式层神经元个数相等,则第i个神经元的传递函数为
(7)
式中,Xi表示第i个神经元对应的学习样本;σ为光滑因子,模式层每个单元对应一个训练样本。本文选取高斯函数为激活函数,求和层由两种类型的神经元求和,与模式层每个神经元连接权值分别为1和yi,分别对应为SD和SN
2) 编制的轴心位置搜索程序,将外力方向角作为初始偏位角,由差值分析得到初始偏心率,可以缩短寻找平衡时轴心位置过程。平衡时,随着转速的增大,润滑油端泄流量呈现上升趋势。
(8)
输出层的值由求和层输出相除,如式(9)所示。
(9)
2.2 RLS自适应滤波
递推最小二乘法是在最小二乘法(Least Squares,LS)的基础上,考虑计算机存储问题的情况下提出的。RLS估计从每次获得的测量值中提取出被估计的信息,用于修正上一步所得的估计。量测次数越多,修正次数越多,估计精度也就越高。与LS相比,RLS不需要存储大量的量测数据[9]。RLS算法求取准则是指误差的加权平方和最小,函数表达式如式(10)所示。
(10)
运用GRNN网络的优化,同时采用RLS自适应滤波去噪,滤波器的输出为
y(n)=wT(n-1)x(n)
(11)
误差估计为
e(n)=d(n)-wT(n-1)x(n)
(12)
增益计算为
(13)
权重系数更新为
w(n)=w(n-1)+G(n)e(n)
(14)
协方差更新为
R(n)=λ-1(R(n-1)-G(n)w(n)R(n-1))
(15)
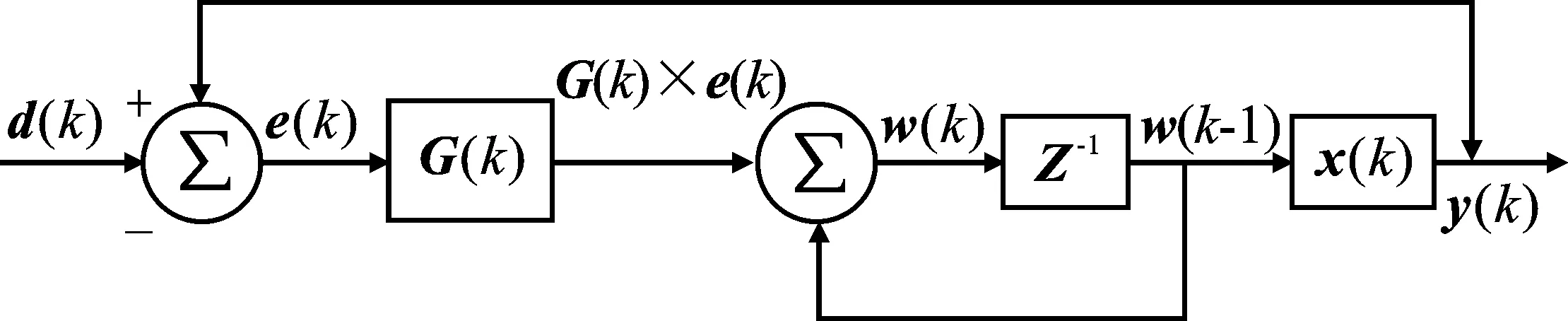
图3 RLS算法流程图
2.3 GRNN网络自适应滤波去噪
自适应噪声对消(Adaptive Noise Cancelling,ANC)方案已被广泛用于多种场合,其可以消除心电图中的工频干扰,除去母亲心电图对胎儿心电图的干扰,消除声音信号的干扰等[18-19]。基于GRNN网络与RLS滤波自适应噪声对消结构的原理如图4所示。
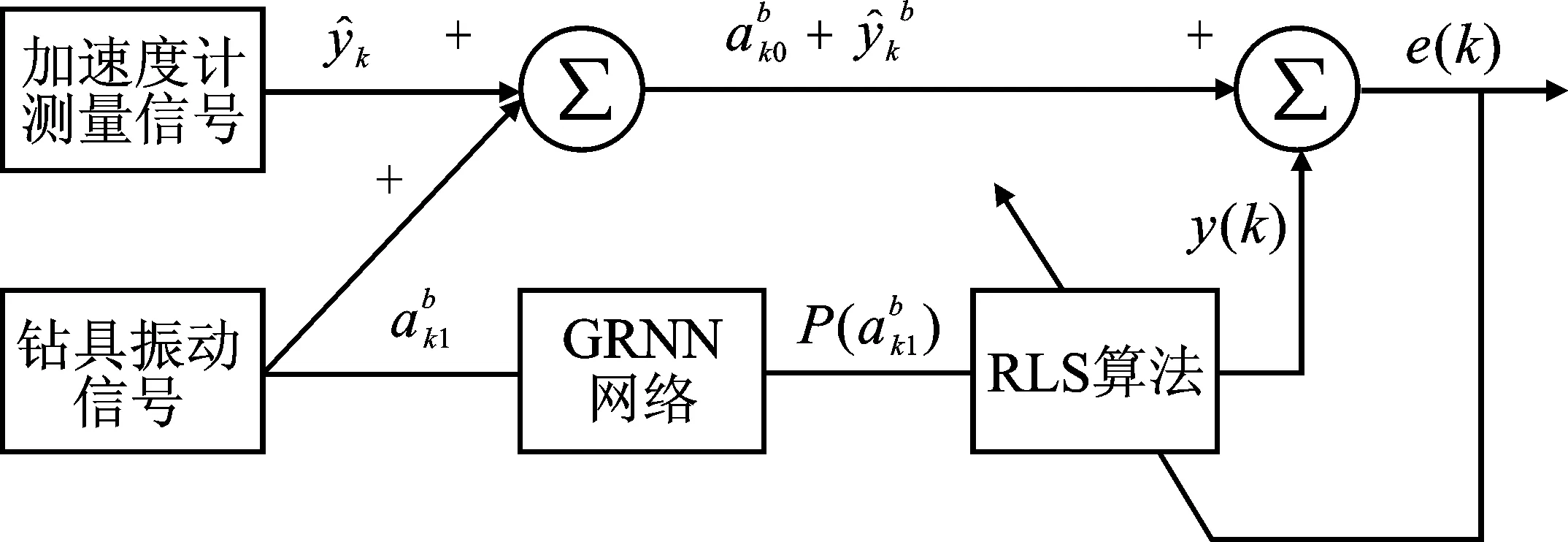
图4 自适应噪声对消原理图

3 研究结果与分析
3.1 模拟钻进实验
本次实验数据通过实验室自主研制的无线蓝牙微惯性测量单元(Micro Inertial Measurement Unit,MIMU)采集。该单元集成三轴微机械(Micro Electronic Mechanical System,MEMS)加速度计、陀螺仪和磁强计。将MIMU固定于钻杆顶部,调整垂直钻杆位置并固定,如图5所示。
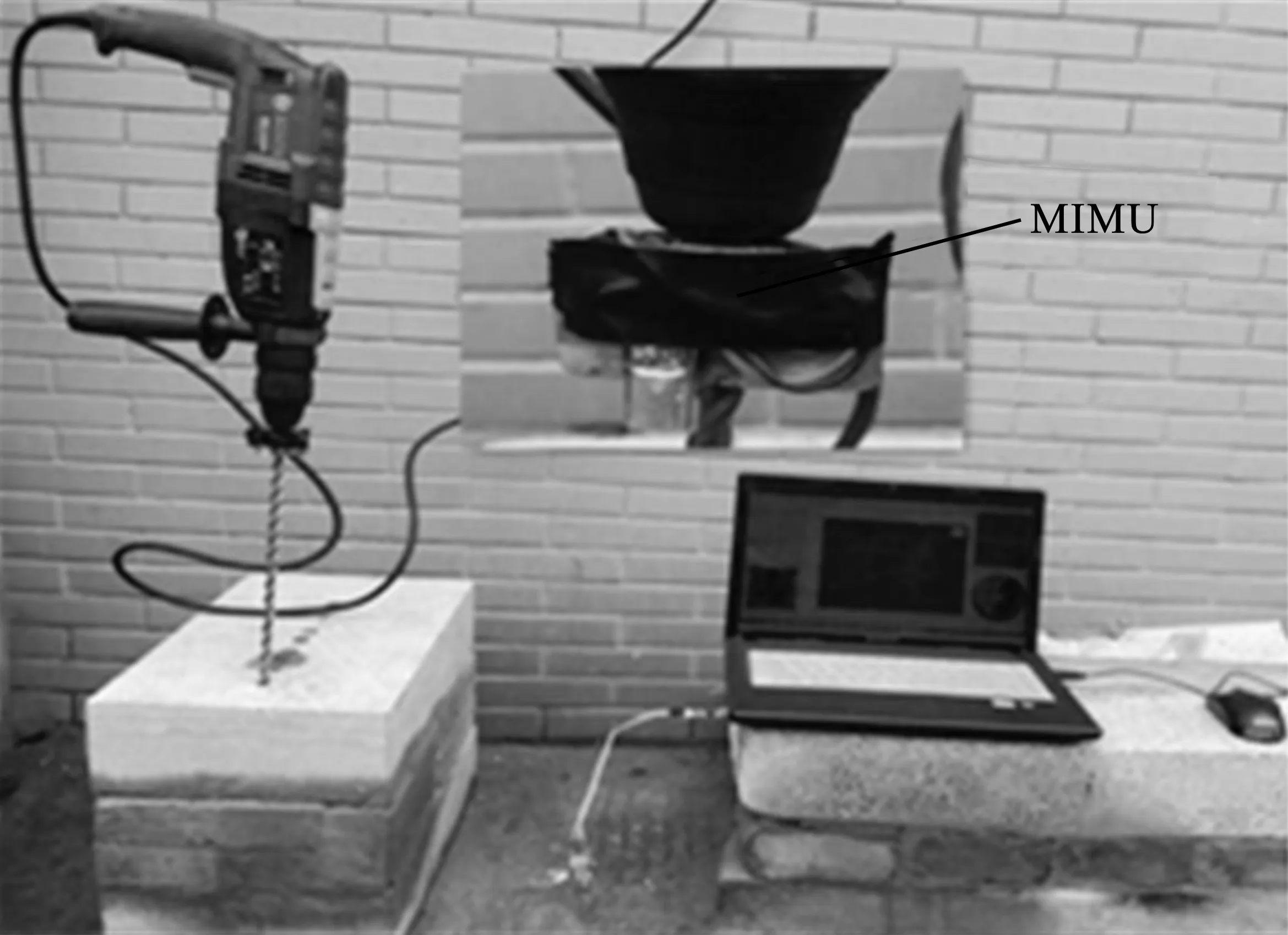
图5 模拟钻进实验
实验钻进时,初始井斜角为-5°,工具面角为-2.8°,恒定转速为360°·s-1。实验结束后对采集的钻具加速度通过图4进行处理。运用本文自适应滤波算法去噪前后,3个轴的加速度信息曲线如图6所示。

图6 滤波前后各轴加速度曲线对比
由图6可以看出,本文算法有效去除了加速度计数据中混叠的大量振动加速度。在提取三轴的重力加速度信号后,通过式(4)可以解算出井斜角和工具面角,结果如图7所示。
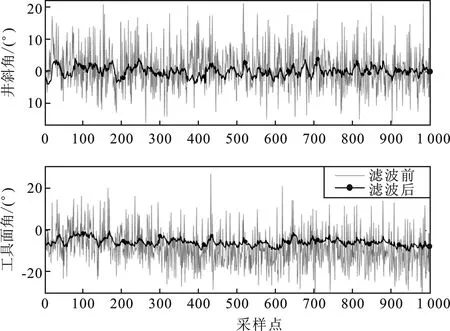
图7 滤波前后井斜角/工具面角对比
由图7可以看出,运用本文滤波算法去噪前解算的井斜角和工具面角波动较大,井斜角平均误差约为13.8°,工具面角平均误差约为10.6°,误差较大。经过GRNN自适应滤波重力提取算法处理后,解算的井斜角误差在1.45°之内,工具面角误差在1.65°之内,误差明显减小。
3.2 实钻实验
为了进一步验证广义回归神经网络与自适应滤波结合的实时性和有效性,选取焦煤集团某矿在稳定的垂直段钻进过程中以采样频率10 s采集的加速度数据,按本文重力提取算法进行重力提取并进行姿态解算。以滤波前后解算的井斜角为例,设置以下3种实验方案:(1)方案1采用原始井斜角;(2)方案2采用RLS算法;(3)方案3采用GRNN-RLS算法。
采用时间、均方根误差(Root Mean Square Error,RMSE)和信噪比(Signal to Noise Ratio,SNR)来比较以上3种方案的降噪效果。RMSE可表示为
(16)
式中,x(t)为真实井斜角;N为数据采集总数;y(t)为降噪后的井斜角。
图8所示为3种方案滤波前后解算的井斜角对比,垂直钻进井斜角理论值应为0°左右。钻具的振动噪声导致解算的井斜角在一定范围内波动。如表1所示为3种方案性能比较计算结果。由表1和图8可以看出方案3在时间、均方根误差、信噪比等指标上有明显的优势。
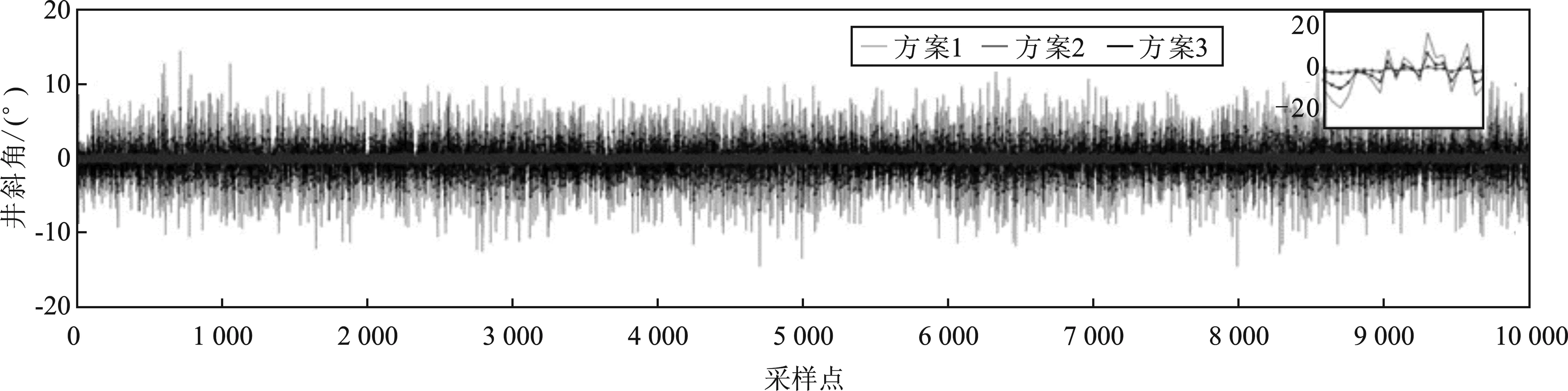
图8 3种方案井斜角对比曲线
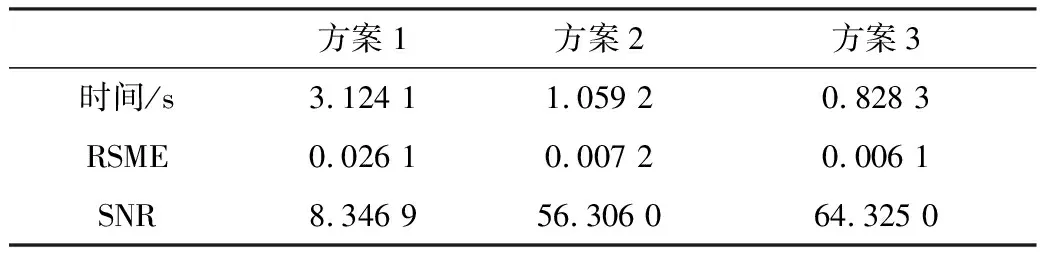
表1 3种方案性能比较
4 结束语
针对随钻测量过程中钻具振动噪声引起的加速度计数据严重失真,进而导致姿态解算误差的问题,本文应用自适应噪声相互抵消原理,将加速度计测量信号与钻具振动信号作为主噪声模型,并将广义回归神经网络处理后的钻具振动信号作为副噪声模型,采用递推最小二乘法滤波处理。实验分析结果表明,在钻进过程中,钻具振动噪声对姿态信息影响较大,本文滤波算法可以有效消除噪声的干扰,提高姿态解算的精度,具有一定工程参考价值。