约束条件对伸长型气动人工肌肉驱动性能的影响
2022-07-11许文智耿德旭
许文智,王 霞,耿德旭,梁 正
(北华大学机械工程学院,吉林 吉林 132021)
因具有柔顺性高、响应快速、环保无污染、重量轻等特点,气动软体机器人受到广泛关注[1-6].近年来,国内外科学家对硅胶材质的软体机器人进行了广泛研究.WANG Tianyu等[7]研制了一款软体驱动器,能够实现大范围耦合弯曲和扭转运动;王宁扬等[8]提出了一款基于蜂巢气动网络的软体执行器,能够完成物体简单抓取.作为气动软体机器人的重要制作方法,硅胶浇铸具有可制作复杂形状、价格低廉、节省材料等优点[9],但影响浇铸质量的因素较多,容易产生气泡,精度低、寿命短.针对以上问题,本文提出硅胶管异形约束的方法.密封硅胶管充入压缩气体后膨胀,充满异型约束腔,实现膨胀形状可控,同时可以提高精度和寿命.根据经典橡胶理论,研究伸长型气动人工肌肉伸长量、驱动力与工作气压之间的关系,并对不同约束条件下人工肌肉的力学性能进行对比试验,分析约束环内腔面积和形状对其驱动能力的影响,研究结果可为人工肌肉驱动力提升奠定基础.
1 人工肌肉的结构与功能
研制的伸长型气动人工肌肉结构见图1.弹性气囊与上、下堵头形成密封腔体,外部同轴套装密布排列的约束环两端分别与上、下端盖连接.气囊采用硅氟橡胶管,具有良好的耐热性和绝缘性,且无毒、无公害,满足人工肌肉要求.
人工肌肉充入压缩气体后,气囊产生径向膨胀和轴向膨胀.当气囊膨胀充满约束环内腔时,径向膨胀受到限制,人工肌肉轴向伸长.人工肌肉随气压的变化见图2.在气压由0增加到0.20 MPa时,人工肌肉由80 mm伸长到108 mm.
2 人工肌肉静力学模型
人工肌肉力学模型见图3.人工肌肉下端盖与底座固定连接,在气体压力驱动下,弹性气囊轴向伸长.根据人工肌肉上端盖处静力学平衡方程可得:

图3人工肌肉力学模型Fig.3Artificial muscle mechanics model
,
(1)
式中:Fp为人工肌肉在气压驱动下的轴向输出力;Fn1、Fn2分别为弹性气囊径向膨胀和轴向膨胀产生的变形阻抗力;Fd为人工肌肉对上端盖的驱动力.
2.1 轴向输出力
由力与压力面积的关系可知,人工肌肉在气压驱动下的轴向输出力
Fp=k1pS,
(2)
式中:k1为人工肌肉不均匀系数,与约束环和气囊的接触状态有关;p为气囊内通入的气压;S为气囊有效工作面积.
人工肌肉工作时,气囊会膨胀变形,膨胀过程中胶管的横截面尺寸会发生变化,气囊在变形过程中体积不变,可得:
V=Snl
, Δl=0时 ;
(3)
V=S′n(l+Δl)
, Δl≠0时 ,
(4)
式中:l为弹性气囊的有效变形长度;Δl为弹性气囊伸长量;Sn为Δl=0时,气囊环形截面面积;S′n为Δl≠0时,气囊环形截面面积.其中
(5)
式中:d1为气囊外径;d2为气囊内径.
通入压缩气体,气囊径向膨胀充满约束环内腔时
S′n=Sq-S,
(6)
式中:Sq为约束环内腔面积.
联立式(3)~(6)得
(7)
联立式(2)、(7)得
(8)
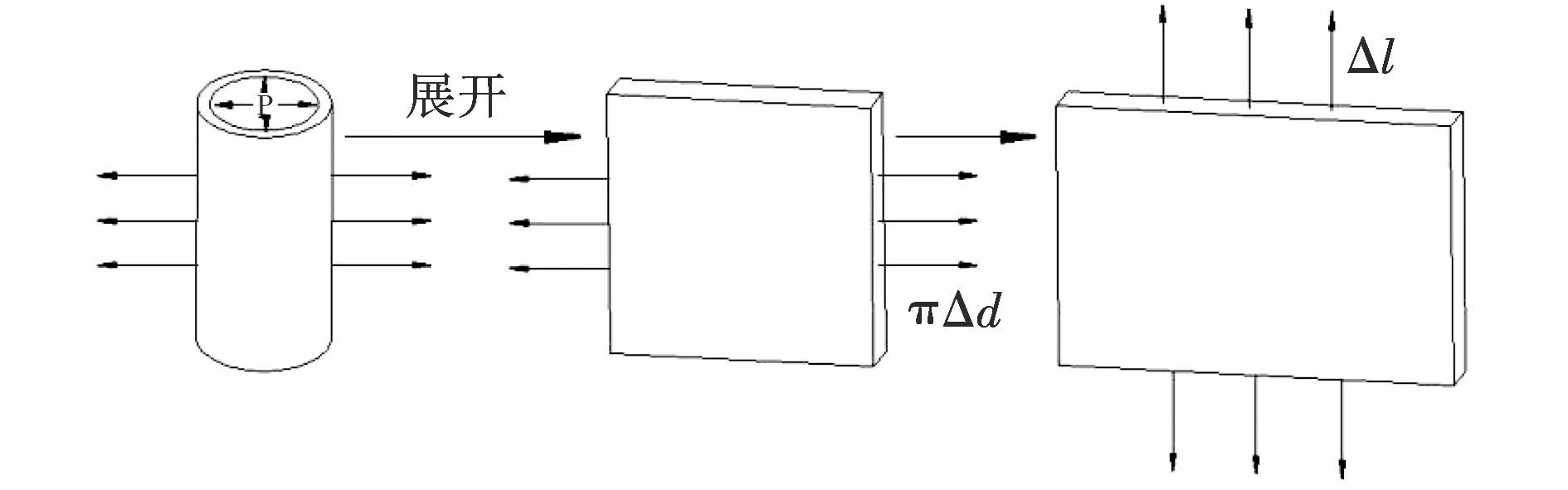
图4橡胶管受限拉伸模型Fig.4Limited tension model of rubber hose
2.2 弹性气囊阻抗力
图4为橡胶管受限拉伸模型.人工肌肉工作时,气囊中充入压缩气体后分为径向膨胀和轴向膨胀两种膨胀过程.由于硅氟胶管侧面作用面积大于两端作用面积,因此,硅氟胶管先发生径向膨胀,后发生轴向膨胀.
1)径向膨胀.气囊在通入气压后会产生一定的径向膨胀,根据弹性力学经典理论,考虑橡胶管大变形的几何因素,橡胶管径向变形阻力
(9)
式中:k2为人工肌肉不均匀系数,与膨胀后气囊壁厚是否均匀有关,取k2=0.61;E为气囊弹性模量,为1.116 MPa;d为气囊的初始中径;Δd为气囊中径的变化量.气囊的初始中径
(10)
气囊膨胀后充满约束环腔体,故有
(11)
(12)
式中:d′1为气囊径向膨胀充满约束环腔体后的外径(将膨胀后的气囊横截面近似看成圆形);d′2为气囊径向膨胀充满约束环腔体后的内径(将膨胀后的气囊横截面近似看成圆形).
气囊膨胀充满腔体,气囊中径
(13)
气囊中径的变化量
Δd=d′-d,
(14)
联立式(5)、(9)~(14)解得

(15)
2)轴向膨胀.气囊在通入气压后产生轴向膨胀,其变形可以看作拉压杆大变形[10].根据弹性力学的经典理论,并考虑气囊大变形后的几何因素,橡胶管轴向变形产生的变形阻力
(16)
联立式(3)~(5)、(16)得
(17)
气囊产生的总阻抗力为径向膨胀和轴向膨胀的阻抗力之和
Fn=Fn1+Fn2
.
(18)
联立式(1)、(8)、(15)、(17)、(18)得

3 人工肌肉静力学试验
3.1 试验原理
利用图5 a的试验原理测试不同约束环对驱动力的影响.人工肌肉底座通过螺栓固定在工作台上,且与试验平台垂直;测力计通过螺栓固定在XY移动滑台上面,便于调节位置,人工肌肉与测力计处于同一轴线;气源通过精密减压阀连接气压传感器,为人工肌肉通入不同压力气体,在内部压力作用下,上端盖沿着轴向方向挤压测力计,得到驱动力数值.搭建如图5 b所示试验平台,该平台由气源、精密减压阀、数显式推拉力计、气压传感器、人工肌肉本体组成.为了保证试验的准确性,在人工肌肉外表面套有机玻璃管,以提高人工肌肉的横向刚度,防止人工肌肉弯曲.试验装置参数见表1.
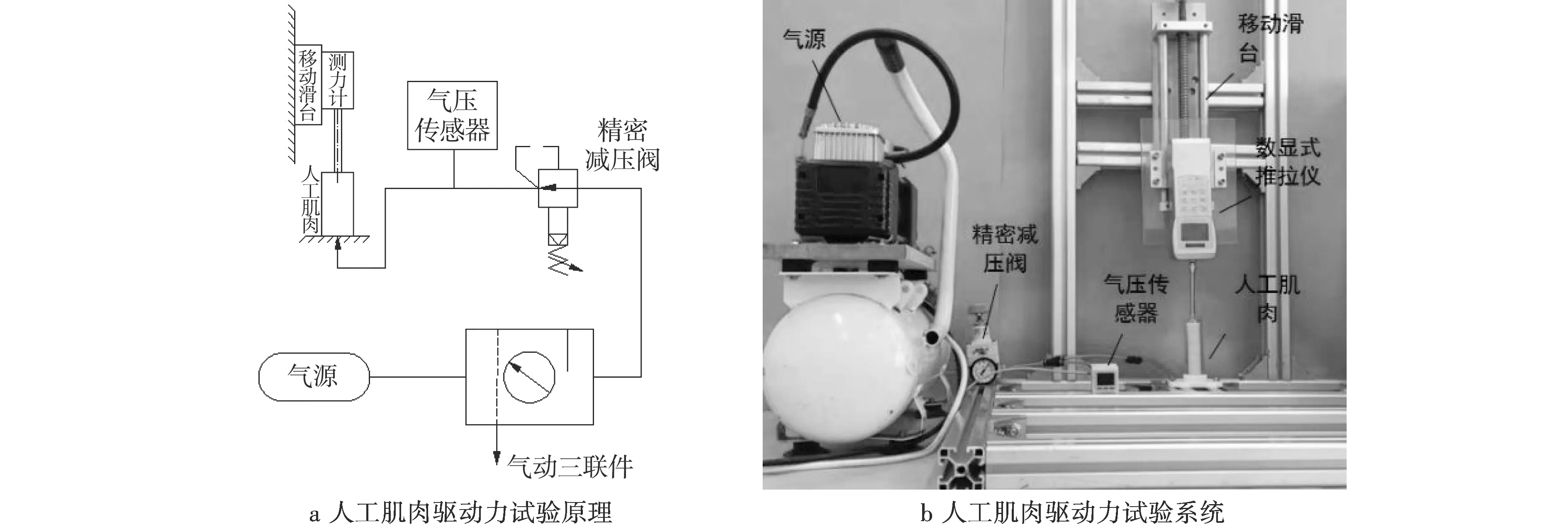
图5人工肌肉驱动力试验Fig.5Driving force experiment of artificial muscle

表1 试验装置参数Tab.1 Experimental device parameters
表2为气动人工肌肉参数,其中,当约束环内腔面积Sq为113 mm2,且约束环内腔为圆形时,弹性气囊外壁与约束环内腔贴合.图6为不同约束环的人工肌肉截面.

表2 人工肌肉参数Tab.2 Artificial muscle parameters

图6不同约束环人工肌肉截面Fig.6Cross-sections of artificial muscles with different confinement rings
3.2 试验结果
由理论值与试验值对比可知k1=1.58.人工肌肉伸长量为0时,气压与驱动力的关系见图7.由图7可知:当充入气体压力小于0.054 MPa时,驱动力为0;当充入气体压力大于0.054 MPa时,气压与驱动力呈线性正相关,理论值与试验值变化趋势相同.由人工肌肉内部气囊变形分析可知,充入压缩气体后,气囊会产生径向膨胀,并且产生一个阻抗力,当气囊充满约束环内腔时,阻抗力不再发生变化;当阻抗力大于气压作用在上堵头产生的推力时,驱动力为0.随着气压的增大和气囊径向膨胀后气囊有效工作面积的增大,作用在上堵头的推力不断增大,当推力大于阻抗力时人工肌肉产生驱动力,且气压与驱动力呈线性正相关.
在人工肌肉伸长量为0时,驱动力与约束环腔体面积的关系见图8.由图8可知:Sq为113 mm2的人工肌肉充入气压与驱动力呈线性正相关.当气压小于0.20 MPa时,Sq为147 mm2的人工肌肉产生的驱动力小于Sq为113 mm2的人工肌肉产生的驱动力;气压大于0.20 MPa时,Sq为147 mm2的人工肌肉产生的驱动力大于Sq为113 mm2的人工肌肉产生的驱动力.由人工肌肉内部气囊变形可知,当Sq为113 mm2时,气囊外壁与约束环内壁贴合时气囊不产生径向膨胀,气压与驱动力呈线性正相关;当Sq为147 mm2,气囊外壁与约束环内壁有间隙时,气囊产生径向膨胀,在产生阻抗力的同时,气囊的有效作用面积也会增大,气压与驱动力的变化率提高,当气压为0.54 MPa时,气囊充满约束环内腔有效作用面积达到最大值.在0.30 MPa下,Sq为147 mm2人工肌肉产生的驱动力比Sq为113 mm2的人工肌肉产生的驱动力提升了9%.
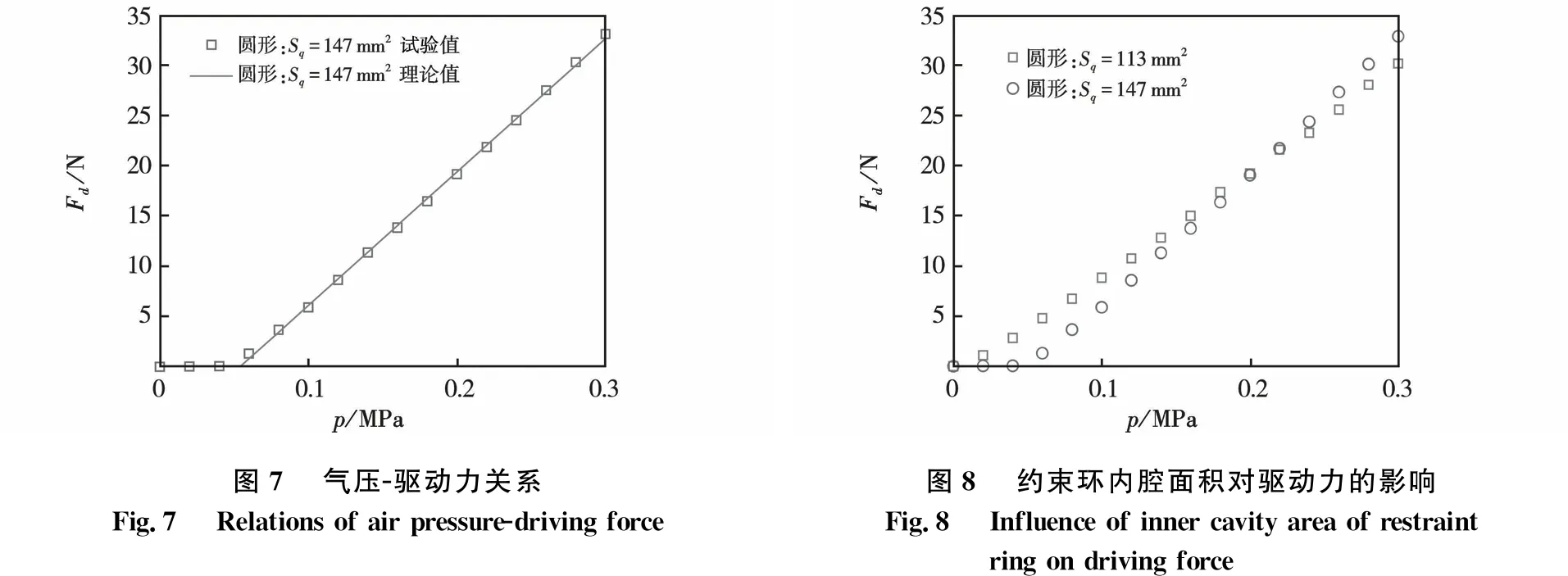
图7气压-驱动力关系Fig.7Relations of air pressure-driving force图8约束环内腔面积对驱动力的影响Fig.8Influence of inner cavity area of restraint ring on driving force

图9约束环内腔形状对驱动力的影响Fig.9Influence of inner cavity shape of restraint ring on driving force
在人工肌肉伸长量为0时,驱动力与约束环内腔形状的关系见图9.由图9可知:同一压力且约束环内腔面积相同时,约束环腔体形状为圆形的人工肌肉驱动力最大,正十二边形次之,正六边形驱动力最小,且气压与驱动力均正线性相关.由人工肌肉内部气囊变形可知,当气囊外壁与约束环内壁形状不吻合时,充入压缩气体气囊膨胀,壁厚分布不均匀导致人工肌肉不均匀系数k2变化,从而对驱动力产生影响.在充入0.30 MPa压缩气体时,约束环内腔为圆形的人工肌肉较正十二边形、正六边形的人工肌肉驱动力分别提升了5.6%、7.8%.
4 结论与讨论
本文自主研制了一种气动人工肌肉,建立了该人工肌肉的静力学模型,进行了不同约束条件下人工肌肉驱动力性能的对比试验,得到人工肌肉的驱动力性能影响规律.试验结果表明:
1)人工肌肉理论模型与试验结果基本吻合,验证了理论模型的正确性.
2)约束环内腔面积对人工肌肉驱动力有影响.约束环内腔面积增大,气囊与约束环内腔之间的间隙变大,径向膨胀产生的变形阻力增大,同时,气囊径向膨胀后气压有效作用面积也增大,对上堵头的推力增大.在0.30 MPa气压下,Sq为147 mm2的人工肌肉产生的驱动力比Sq为113 mm2的人工肌肉产生的驱动力提升了9%.
3)约束环内腔形状对人工肌肉驱动力有影响,约束环内腔与气囊吻合度越高驱动力越大.约束环内腔为圆形的人工肌肉较正十二边形、正六边形的人工肌肉驱动力分别提升了5.6%和7.8%.
试验结果表明,约束环内腔面积和形状对人工肌肉的驱动性能有影响.本次研究可为提升人工肌肉驱动力研究奠定基础.
