不平衡电压条件下双馈感应发电机混合直接功率控制策略
2022-06-15王一翔孙士涛贾利民
王一翔,孙士涛,程 鹏,马 静,贾利民,3
(1. 华北电力大学 国家能源交通融合发展研究院,北京 102206;2. 华北电力科学研究院有限责任公司,北京 100045;3. 北京交通大学 轨道交通控制与安全国家重点实验室,北京 100044)
0 引言
近年来,基于双馈感应发电机(DFIG)的风电机组因具有变速运行、功率解耦控制、变频器额定容量较低等优点而得到了广泛的应用[1-2],其主要控制策略包括矢量控制(VC)、直接功率控制(DPC)两大类。VC 通过电压矢量定向与旋转坐标系变换将三相电流解耦为有功电流、无功电流,分别构成有功电流、无功电流的闭环控制。DPC 可在无需电压矢量定向和旋转坐标变换的条件下,构造有功功率、无功功率的闭环控制,实现功率的无差跟踪控制。
然而,查表法DPC 策略使用了滞环控制器,会导致开关频率不固定、纹波大等现象发生。为了获取固定的开关频率,主要改进方法包括基于模型预测控制的直接功率控制(MPC-DPC)[3]和基于空间矢量调制的直接功率控制(SVM-DPC)[4-6]两大类:MPCDPC 通过构造目标函数以获取固定开关频率,但这种非线性控制的实施较复杂,计算负担大;SVM-DPC通过空间矢量调制进行调制电压合成,可在采用常规线性控制器的条件下获取固定的开关频率,具有控制结构简单、易于实现等优点。
近年来,文献[7-12]在SVM-DPC 结构框架下对不平衡电压条件下DFIG 的控制进行了研究。文献[7-8]通过在有功功率、无功功率参考值中加入相应的功率补偿项,实现了并网功率、负序电流的灵活控制;文献[9]构造了2 倍频功率控制器,以获取相应的负序励磁电压。上述控制策略需根据正、负序电压和电流分量计算2 倍频功率分量,从而获取适用于不平衡电压条件下2 倍频功率控制的励磁电压。文献[10-12]引入拓展无功功率理论,通过组合常规功率与拓展功率,可在无需对并网电流进行正、负序分离的情况下消除有功功率或无功功率的2 倍频波动分量。然而,上述控制策略着眼于构建适用于不平衡电压条件下有功功率、无功功率的目标指令,很少关注多运行目标下功率反馈值的灵活配置。
为此,本文结合常规功率与拓展功率,提出了混合直接功率控制(H-DPC)策略:首先,构造了有功功率、无功功率的调制电压,可在无需锁相同步的条件下实现对DFIG定子有功功率、无功功率的无差跟踪控制;然后,通过常规功率与拓展功率的灵活组合,在无需电压、电流相序分离的条件下,设计了可消除DFIG 定子有功功率/无功功率的2 倍频波动分量及定子负序电流的功率反馈量;最后,基于RTLAB硬件在环实验验证了所提H-DPC策略的有效性。
1 数学模型
1.1 功率分析
在本文的研究中,假设三相三线电网含有负序电压,且没有零序电压和谐波畸变,则在αβ两相静止坐标系下的电压、电流可分别表示为:

式中:usα、usβ和isα、isβ分别为DFIG定子电压和电流的α、β轴分量;下标“+”、“-”分别表示正序、负序分量;Us+、Us-和Is+、Is-分别为正、负序电压和电流的幅值;θu+、θu-和θi+、θi-分别为正、负序电压和电流的初始相位;ωg为电网角频率。
根据常规功率理论,DFIG 定子的视在功率可表示为:

式中:Ss、Ps、Qs分别为DFIG 定子的常规视在功率、有功功率、无功功率;Usαβ=usα+jusβ、Isαβ=isα+jisβ分别为定子电压、电流矢量;上标“∗”表示共轭。
在不平衡电压条件下,DFIG 定子的常规有功功率、无功功率均包含平均分量和2 倍频波动分量,即:
式中:Re、Im 分别表示实部、虚部;Ps-0、Qs-0分别为常规有功功率、无功功率的平均分量;Ps-i2、Qs-i2分别为由正序电压和负序电流引起的常规有功功率、无功功率的2 倍频波动分量;Ps-u2、Qs-u2分别为由负序电压和正序电流引起的常规有功功率、无功功率的2倍频波动分量。
拓展功率理论采用1/4周期延时(滞后90°)的电压与实时测量电流作为变量,其中1/4周期延时的电压可表示为:

式中:上标“′”表示1/4周期延时。
则DFIG 定子的拓展有功功率Ps_ex和拓展无功功率Qs_ex可表示为:
式中:Ps_exi2、Qs_exi2分别为由正序电压和负序电流引起的拓展有功功率、无功功率的2 倍频波动分量;Ps_exu2、Qs_exu2分别为由负序电压和正序电流引起的拓展有功功率、无功功率的2 倍频波动分量;为1/4周期延时后的定子电压共轭矢量。
通过对比式(5)、(6)、(9)、(10),可得:
可见,由正序电压和负序电流引起的常规与拓展有功功率/无功功率的2 倍频波动分量相等,而由负序电压和正序电流引起的常规与拓展有功功率/无功功率的2 倍频波动分量互为相反数。需要指出的是,由负序电压和电流产生的平均有功功率和无功功率相对较小,可将其近似视为0,因此,在不平衡电压条件下,常规有功功率/无功功率与拓展有功功率/无功功率的平均分量相等。
1.2 DFIG模型
两相静止坐标系下DFIG 的等效电路如图1 所示,则DFIG电压和磁链的动态方程分别为:
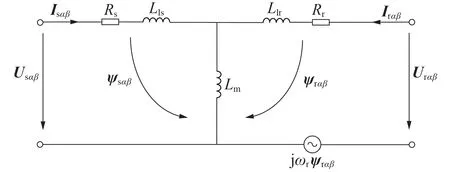
图1 静止参考系下DFIG的等效电路Fig.1 Equivalent circuit of DFIG in stationary reference frame
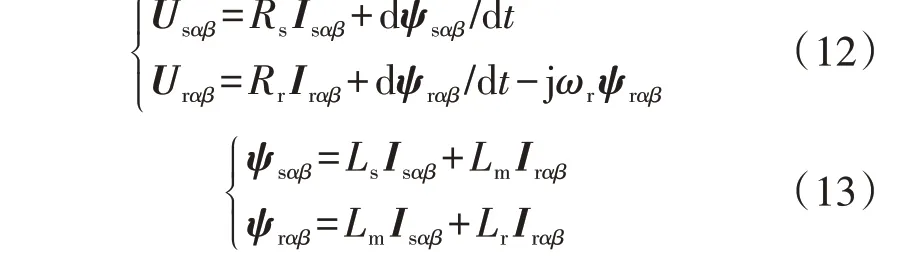
式中:ψsαβ、ψrαβ分别为定、转子磁链矢量;Urαβ、Irαβ分别为转子电压、电流矢量;Rs、Rr分别为定子、转子电阻;ωr为转子角频率;Lm为互感;Ls=Lm+Lls、Lr=Lm+Llr分别为定子、转子自感,Lls、Llr分别为定子、转子的漏电感。
根据式(13),DFIG 的转子磁链、转子电流可分别表示为:
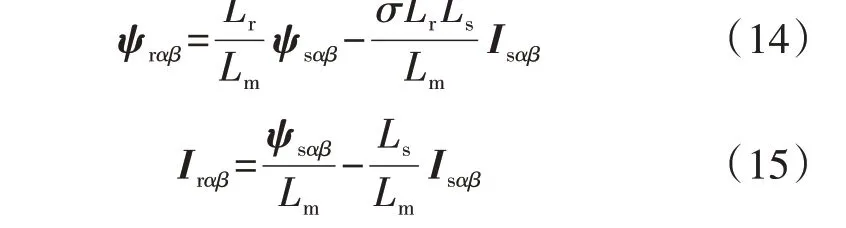
式中:σ=1-/(LsLr)为漏磁系数。
将式(14)和式(15)代入式(12)的转子电压动态方程中,可得DFIG定子电流的动态方程为:
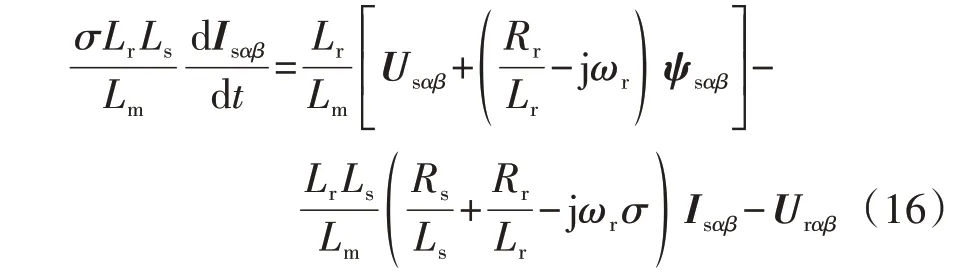
由于转子电阻Rr远小于转子自感Lr,定子电阻Rs远小于定子自感Ls,为了简化模型,可以认为式(16)中的Rr/Lr、Rs/Ls为0,则定子电流的动态方程可简化为:

根据式(1)和式(7),DFIG 定子电压的动态方程可表示为:

则DFIG视在功率的动态方程可表示为:

式 中:Ss_ex=1.5Isαβ=Qs_ex+jPs_ex为DFIG 定 子 的 拓展视在功率。
将式(17)代入式(19),可得:
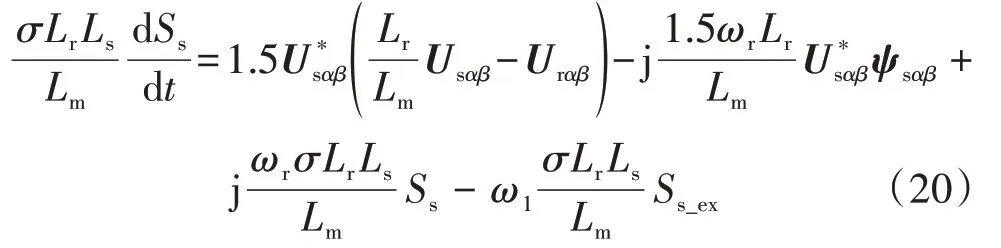
式中:ω1为电网的标称角频率。
考虑到电网的实际频率偏差相对较小[13-14],为了简化控制模型,在基频频率为50 Hz 的电网环境下,可采用标称角频率ω1=100π rad/s 代替式(19)中的实际角频率ωg。因此,式(20)可改写为:
可以注意到,在式(21)中DFIG 有功功率和无功功率的动态方程含有与交流电压相关的系数,这使其成为时变系统。为了将时变系统变为时不变系统,将有功功率的调制电压uP和无功功率的调制电压uQ定义为:
式中:Usm为定子电压的幅值。
由于引入了有功功率和无功功率的调制电压,则DFIG有功功率和无功功率的动态方程可简化为:
由式(24)可见,由于引入了DFIG 有功功率和无功功率的调制电压,DFIG 有功功率和无功功率的时变微分方程被转化为时不变常系数方程,为采用比例-积分等线性控制器提供了理论基础。
2 控制系统
2.1 控制系统设计
不平衡电压会导致DFIG 定子出现不平衡电流、2 倍频波动功率等负面效应,继而进一步恶化DFIG的运行性能。为了增强DFIG 对不平衡电网环境的适应性,可设置如下3 个控制目标:①目标1,消除DFIG 定子有功功率的2 倍频波动分量;②目标2,消除DFIG 定子无功功率的2倍频波动分量;③目标3,消除DFIG定子的负序电流。
1)针对目标1,由于DFIG 定子有功功率的2 倍频波动分量为0,根据式(5),有Ps-i2+Ps-u2=0,则DFIG定子负序电流的幅值与相位可表示为:

则DFIG 定子拓展无功功率的2 倍频波动分量可表示为:

可见,DFIG 定子拓展无功功率的2 倍频波动分量互为相反数,则DFIG定子的拓展无功功率为恒定直流量形式。换言之,当设置目标1 时,DFIG 定子常规有功功率和拓展无功功率的2 倍频波动分量可同时被消除。因此,DFIG 功率控制闭环的反馈量可设置为:

式中:Psfb、Qsfb分别为DFIG 定子有功功率、无功功率的闭环反馈量。
2)针对目标2,由于DFIG 定子无功功率的2 倍频波动分量为0,根据式(6),有Qs-i2+Qs-u2=0,则DFIG定子负序电流的幅值与相位可表示为:

DFIG 定子拓展有功功率的2 倍频波动分量可表示为:

可见,DFIG 定子拓展有功功率的2 倍频波动分量互为相反数,则DFIG定子的拓展有功功率为恒定直流量形式。换言之,当设置目标2 时,DFIG 定子常规无功功率和拓展有功功率的2 倍频波动分量可同时被消除。因此,DFIG 功率控制闭环的反馈量可设置为:

可以注意到,基于式(12),DFIG 定子拓展功率和常规功率的平均值相等,若按照式(28)正确输入负序电流,则DFIG定子拓展有功功率和常规无功功率的2倍频波动分量为恒定值。
3)针对目标3,由于DFIG 定子的负序电流为0,由负序电流和正序电压引起的常规有功功率和无功功率的2 倍频波动分量为0,即Ps-i2=Qs-i2=0。但是,由负序电压和正序电流引起的常规有功功率和无功功率的2 倍频波动分量仍然存在,即Ps-u2≠0,Qs-u2≠0。
由于DFIG 定子常规和拓展有功功率/无功功率的2 倍频波动分量总是相反且与负序电流无关,通过将常规和拓展功率相加,可获得恒定的功率反馈。由于相加后总的平均分量是恒定功率参考值的2 倍,为了保证平均功率输出,需乘以取值为0.5 的附加系数,则DFIG 功率控制闭环的反馈量可设置为:

根据上述分析可知,在不平衡电压条件下,实现消除有功功率和无功功率的2 倍频波动分量以及定子负序电流这3 个控制目标所需注入的负序电流各不相同,则无法控制DFIG 同时实现上述3 个控制目标。
2.2 控制系统实施
在不平衡电压条件下,为了实施对DFIG 定子功率平均直流量与2 倍频交流量的无差跟踪控制,可采用比例-积分-谐振PI+R(Proportional Integral plus Resonant)调节器。由于实际电网频率与额定电网频率之间存在微小偏差,为了降低实际电网频率与额定电网频率之间的偏差对PI+R 调节器的影响,通常引入截止角频率ωc,则PI+R 调节器的传递函数G(s)可表示为:

式中:kp、ki、kr分别为比例、积分、谐振系数;后续研究中设置截止角频率ωc的取值为10 rad/s。
根据式(24),可计算得到DFIG 定子有功功率、无功功率的调制电压为:
式中:vP、vQ分别为有功、无功功率控制器的输出;Psref、Qsref分别为DFIG 定子有功功率、无功功率的目标参考值。
根据式(22),在两相静止坐标系下,DFIG 转子励磁电压与有功功率、无功功率调制电压之间的关系可表示为:

然后,结合转子的位置角,获取在转子两相静止坐标系(相对定子两相静止坐标系以转子角频率旋转)下DFIG转子励磁电压,如式(36)所示。

式中:urα_r、urβ_r为DFIG 转子两相静止坐标系下的转子电压;θr为转子的位置角。
H-DPC 结构框图如图2 所示。图中:usabc和isabc分别为三相定子电压和电流;Vdc为直流侧电压。可见,H-DPC 结构主要包括3 个环节:①功率反馈生成环节,可结合设置的控制目标,根据式(27)、(30)、(31),生成相应的功率反馈量;②功率跟踪环节,采用PI+R 调节器实现呈现平均直流量与2 倍频交流量形式的混合功率对目标功率的无差跟踪控制;③励磁电压生成环节,根据式(35)和式(36)实现有功功率、无功功率调制电压与DFIG转子励磁电压之间的转换。可见,采用本文所提H-DPC 策略,在两相静止坐标系下构建有功功率、无功功率调制电压而无需锁相电压矢量定向,同时可在无需对电压、电流进行相序分离与提取的情况下,实现对DFIG定子功率的2 倍频分量与负序电流的控制,增强DFIG 应对不平衡电压的运行控制能力。
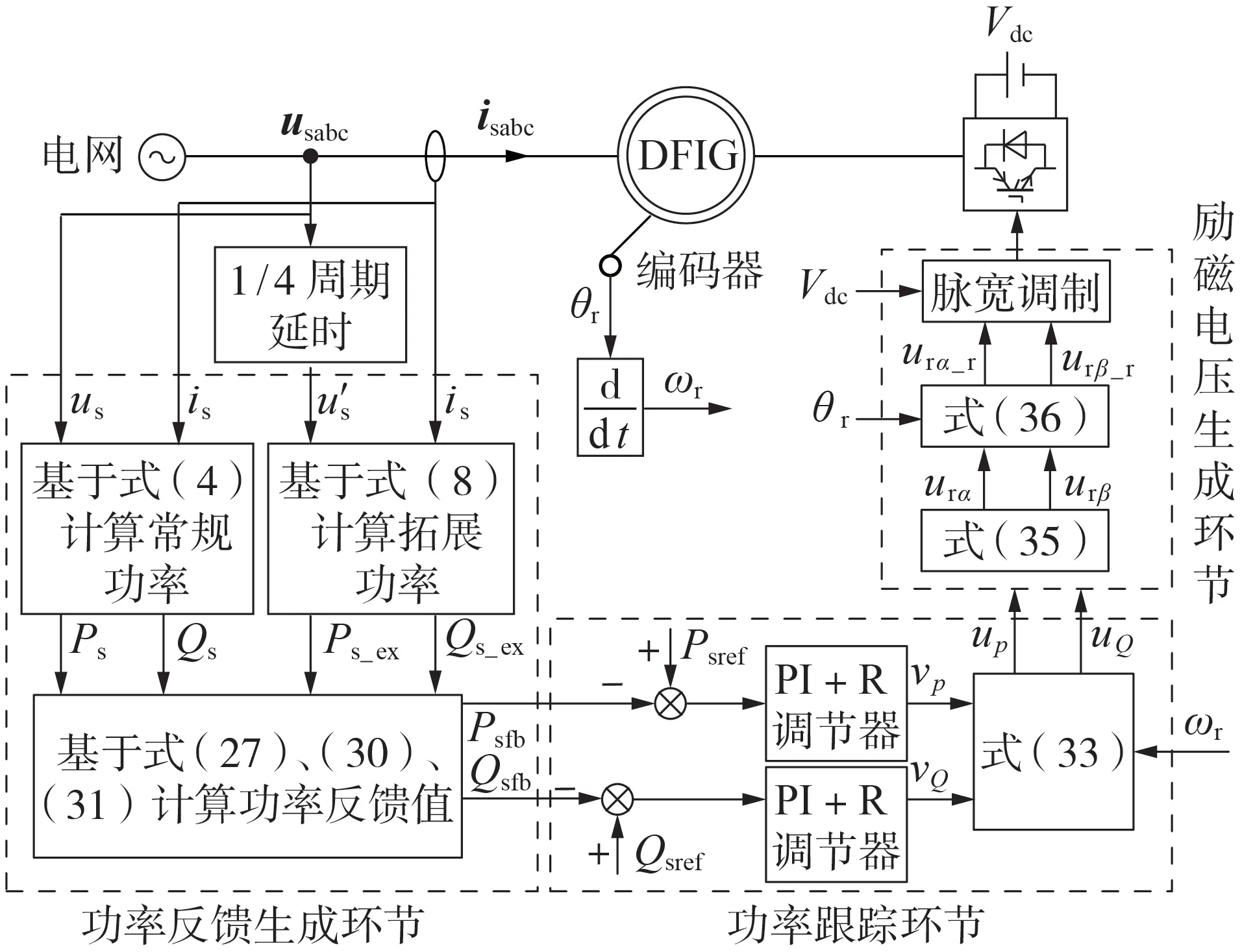
图2 H-DPC结构框图Fig.2 Structure diagram of H-DPC
3 硬件在环实验
为了验证本文所提H-DPC 策略的有效性,在RTLABOP5700 与NIPXIe 1071 构成的硬件在环实验平台上进行实验研究,硬件在环实验平台和DFIG相关参数分别见附录A图A1和表A1。
在硬件在环实验中,主电路运行在RTLAB 中,通过模拟输出H-DPC 实施所需的电压、电流信息;H-DPC 策略运行在NI PXIe 1071 中,输出控制变流器的脉冲信号,并设置以下4种运行模式。
1)模式1:采用式(4)给出的常规有功功率、无功功率作为功率反馈量。
2)模式2:以消除DFIG 定子有功功率的2 倍频波动分量为目标,采用式(27)所示混合功率作为功率反馈量。
3)模式3:以消除DFIG 定子无功功率的2 倍频波动分量为目标,采用式(30)所示混合功率作为功率反馈量。
4)模式4:以消除DFIG 定子的负序电流为目标,采用式(31)所示混合功率作为功率反馈量。
平衡电压条件下DFIG 功率阶跃实验结果如图3 所示。由于电机的机械时间常数与电磁时间常数存在数量级差别,可假设DFIG 的转子速度为1.2 p.u.(超同步)。在硬件在环实验中,DFIG采用运行模式2,即以常规有功功率、拓展无功功率作为功率反馈量,其有功功率目标参考值设定为1.0 MW,在200 ms时阶跃为1.6 MW,在450 ms时恢复为1.0 MW,而其无功功率目标参考值设定为0,在300 ms 时阶跃为0.4 Mvar(容性),在400 ms 时恢复为0。可见,DFIG 的有功功率和无功功率可以快速、无差地跟踪其目标参考值,且其定子电流和转子电流保持高正弦度,总谐波畸变率(THD)分别为2.3%和2.2%。
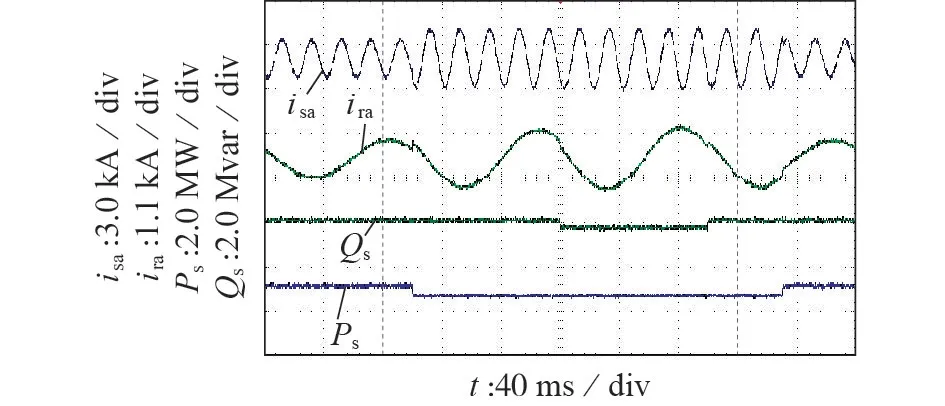
图3 平衡电压条件下DFIG功率阶跃实验结果Fig.3 Experimental results of DFIG power step under balanced voltage condition
不平衡电压条件下DFIG 多目标控制的实验结果如图4 所示(图中Te为电磁转矩)。其中,DFIG定子有功功率、无功功率的目标参考值分别设置为2.0 MW、0。在[0,100]ms内,采用运行模式1,DFIG定子有功功率、无功功率的2 倍频波动分量得到抑制,但DFIG 定子电流存在明显的谐波畸变,THD为10.2%,其中以3次谐波含量最高,达到9.9%。在100 ms 后,采用H-DPC 策略,DFIG 定子电流谐波得到明显抑制,THD下降为1.8%。在(100,200]ms内,采用运行模式2,可消除DFIG 定子有功功率的2 倍频波动分量,而DFIG 定子无功功率的波动幅度达到19.8%,同时引入表征负序电流幅值与正序电流幅值比值的电流不平衡度CUF(Current Unbalance Factor),其值约为10.8%。在(200,300]ms 内,采用运行模式3,DFIG 定子无功功率的2 倍频波动分量得到明显抑制,但其定子有功功率的波动幅度升高到19.2%,定子三相CUF为9.1%。在(300,400]ms内,采用运行模式4,DFIG 定子电流三相平衡,其CUF 下降为0.1%,此时DFIG 有功、无功功率的波动幅度分别为9.3%、9.6%。可见,采用H-DPC 策略可在保证DFIG 定子电流高正弦度的基础上,实现对DFIG 定子有功功率、无功功率2 倍频波动分量以及定子负序电流的有效抑制,增强DFIG在不平衡电压条件下的运行能力。
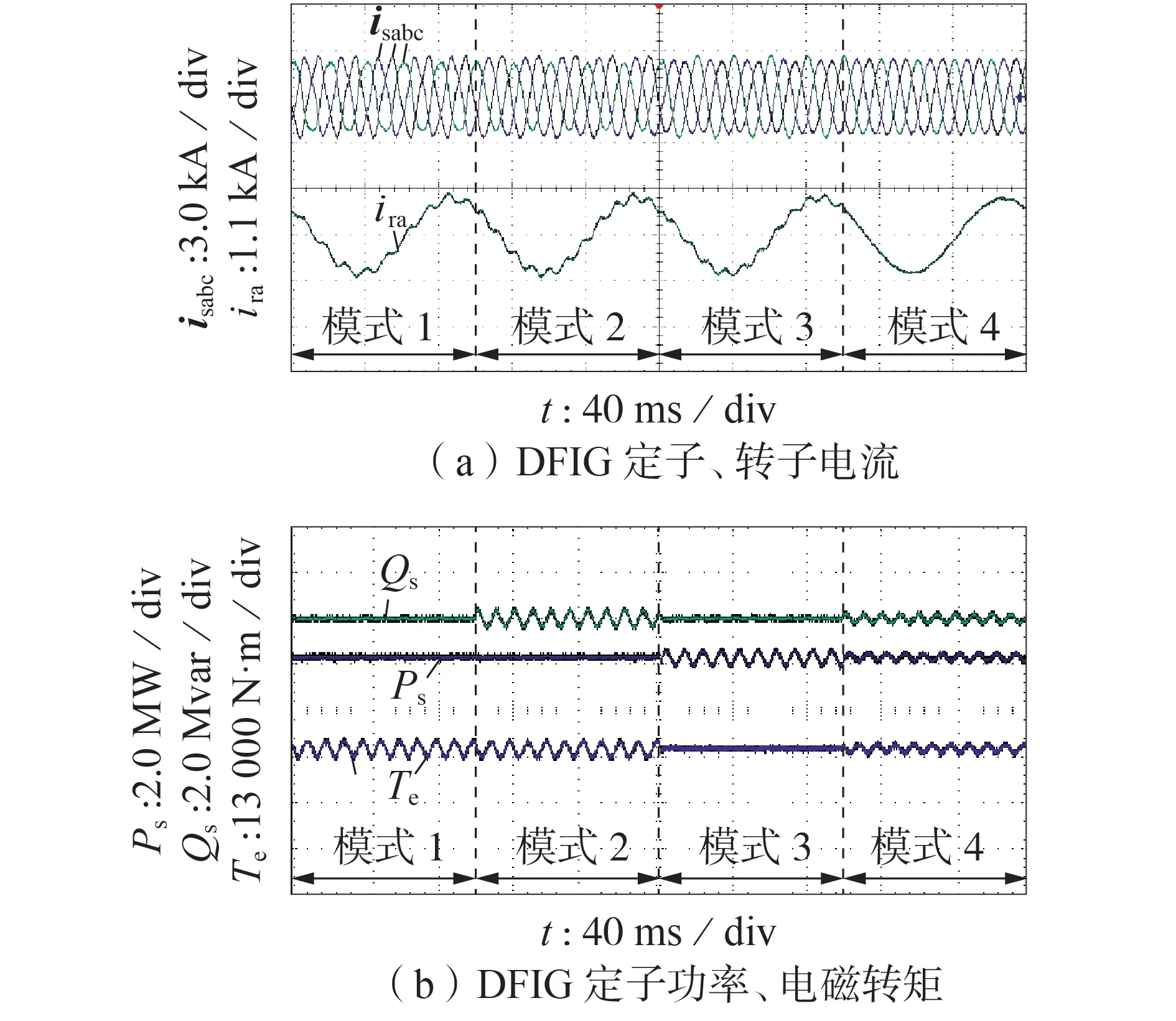
图4 不平衡电压条件下DFIG多目标控制的实验结果Fig.4 Experimental results of multi-objective control for DFIG under unbalanced voltage condition
为了对比不同的运行模式下DFIG 的并网特性,表1 给出了DFIG 定子电流THD、CUF 以及定子有功功率、无功功率2 倍频分量的波动幅度。由表可知,相较于运行模式1,H-DPC 可显著降低DFIG 定子电流的THD,保证高正弦度DFIG 定子电流输出,实现对有功和无功功率2 倍频波动分量及DFIG 定子负序电流的有效抑制,有效降低DFIG 电磁转矩的2 倍频波动分量,削弱不平衡电压对DFIG运行特性的负面影响,增强不平衡电压下DFIG的运行控制能力。
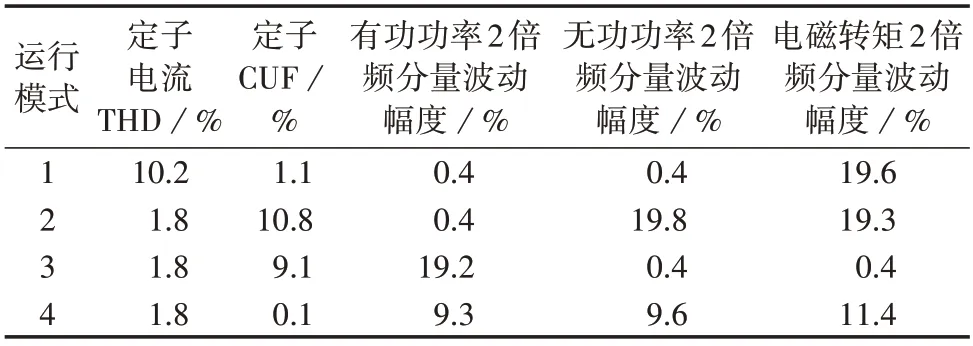
表1 不平衡电压条件下DFIG的运行性能比较Table 1 Comparison of DFIG’s operation performance under unbalanced voltage condition
为了进一步验证采用H-PDC 策略的DFIG 在瞬态不平衡电压扰动下的动态性能,图5 给出了在10%瞬时不平衡电压下DFIG暂态响应的实验结果,其中在200 ms 时出现10%瞬态不平衡电压。在实验中,DFIG 的有功功率、无功功率的目标参考值分别设置为2.0 MW、0,且采用运行模式2,即以消除DFIG 定子有功功率的2 倍频波动分量为目标。为了消除DFIG 定子有功功率的2 倍频波动分量,需注入式(28)所示的DFIG 定子负序电流,这不可避免地导致DFIG 转子电流存在110 Hz 谐波分量。在瞬态负序电压扰动发生后,H-DPC 可快速消除定子有功功率的2 倍频波动分量,并实现反馈功率的无差跟踪控制,且DFIG的暂态响应时间约为15 ms。
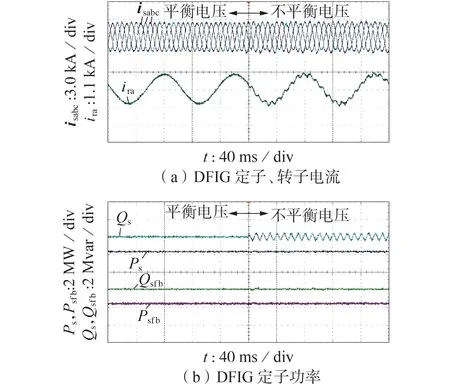
图5 不平衡电压条件下DFIG暂态响应的实验结果(模式2)Fig.5 Experimental results of DFIG’s transient response under unbalanced voltage condition(Mode 2)
4 结论
本文提出了不平衡电压条件下DFIG 的H-DPC策略。该控制策略在两相静止坐标系下构建有功功率、无功功率的调制电压,可在无需锁相矢量定向的情况下实现对有功功率、无功功率的无差跟踪。同时,通过常规功率理论和拓展功率理论的组合,构造了可消除有功功率/无功功率2 倍频波动分量和负序定子电流的混合功率反馈量,避免了DFIG定/转子电流的正、负序分离与提取,实现了既定的运行控制目标,增强了DFIG在不平衡电压条件下的运行能力。最后,通过硬件在环实验验证了所提H-DPC 策略的有效性。
附录见本刊网络版(http://www.epae.cn)。
