卒中患者跨越障碍的运动控制策略及其康复应用
2022-06-13陆琰曹燕徐海辰于小明蒋黎明伍勰
陆琰,曹燕,徐海辰,于小明,蒋黎明,伍勰
1.上海中医药大学附属第七人民医院康复治疗科,上海 200137;2.上海体育学院运动健身科技省部共建教育部重点实验室,上海 200438
因脑卒中引发的运动功能障碍是限制中老年人步行能力和诱发跌倒的主要因素[1]。跨越障碍是卒中者回归社区需面对的步行任务之一,研究显示因跨越障碍而引发的跌倒发生率高达21%[1-2]。成功安全地跨越障碍不仅需要精确控制摆动腿的运动轨迹,同时还需对侧提供稳定单支撑,以及近端环节(骨盆、躯干及上肢摆动)的协调配合[3]。不同于健康人群的简单屈膝和屈髋跨越障碍,卒中者因功能障碍常需采用一系列的步态调整和运动补偿策略来成功跨越障碍和维持平衡[4]。
随着康复医学的重新定位,功能康复的目标越来越侧重于运动控制能力和策略的修改和应用,即可根据外界环境、任务目标和个体功能水平,实时修改运动控制策略来完成运动任务[5-8]。在线修改运动控制策略的能力不仅有助于降低跌倒发生率,同时也是卒中者回归生活和融入社会的关键[8]。因此梳理卒中者在跨越障碍中采取的运动控制策略,理解不同策略背后的生物力学机理,对于康复训练和跌倒预防方案的制定具有重要意义。
1 障碍前的步态调整策略
在接收到运动指令后,卒中者需采用一系列的预期姿势和步态调整来接近障碍物。障碍物前的步态调整策略对于成功安全地跨越障碍至关重要。当前研究主要通过步态的时空参数来反映卒中者的步态调整,如步速和步长等。
1.1 步速调整
卒中者在执行步行相关任务时(跨越障碍、步行或上下坡等)步速降低已是领域内共识性的观点[6,9-10]。针对跨越障碍前的步速降低,不同学者解读结果的思路却不相同。部分学者仅将其作为运动功能水平的直接体现[11],而有些学者则将其作为步态调整和运动控制策略的窗口[5]。从运动控制角度来看,障碍前的步速降低具有如下优势:(1)基于速度准确性的权衡理论,低步速有利于后续跨越障碍中肢体摆动和轨迹的精确控制[6];(2)在相同距离下,低步速可为动作修正、风险应对和平衡控制提供足够时间[8]。
1.2 步长调整
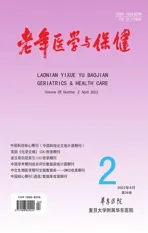
不同于步速降低的一致性观点,既往研究中关于步长调整的方案则较为混乱,大致可分为短步策略(short-step strategy,SSS)和长步策略(long-step strategy,LSS)。以Said 等为代表的学者认为SSS 存在如下优势[2,4,7-9]:(1)SSS 可有效缩短质心和压心在水平面投影的前后距离以及重力臂,使得卒中者采用较小的肌肉力即可维持平衡,换而言之功能水平越低的人群可能更加倾向于采用SSS; (2)SSS 有助于卒中者产生足够的制动力来控制质心的前后方向速度; (3)SSS 使得卒中者在放置脚步位置时更加精确,可为跨越步提供基础。与此不同的是,部分研究发现LSS 时视觉反馈信息是持续可见的,可弥补卒中者本体感觉缺失和感觉中枢整合障碍,因此卒中者采用LSS 接近和跨越障碍物[4,6,12]。
对当前可类比的研究文献进行归纳整理,得出导致研究结果不同的可能原因,具体如下:(1)SSS 和LSS 的定义方式不同(即计算步长变异性的参考步不同),如Huang 等[4]将上一步作为参考步长,Nakano等[6]则将平均步长作为参考步长,而Said 等[10]则以健康对照的平均步长作为参考步长;(2)受试者功能水平存在较大差异,如Huang 等[4]纳入受试者为存在痉挛的卒中者,Den Otter 等[12]和Lu 等[13]则纳入Brunnstrom5 期及以上的患者;(3)实验条件设计存在不同,包括先行腿选择、跨越障碍高度等。
综合来看,步长策略的选择可能主要基于自身功能水平。对于健康老年人和功能水平较好的卒中者而言,更加倾向于选择LSS;而对于功能障碍严重的卒中患者,SSS 可能对于其完成跨越障碍任务和维持平衡更具有优势。未来步长策略研究应以相同的依据计算步态变异性,并在相同的对照和基线水平上探讨步态调整策略。见图1。
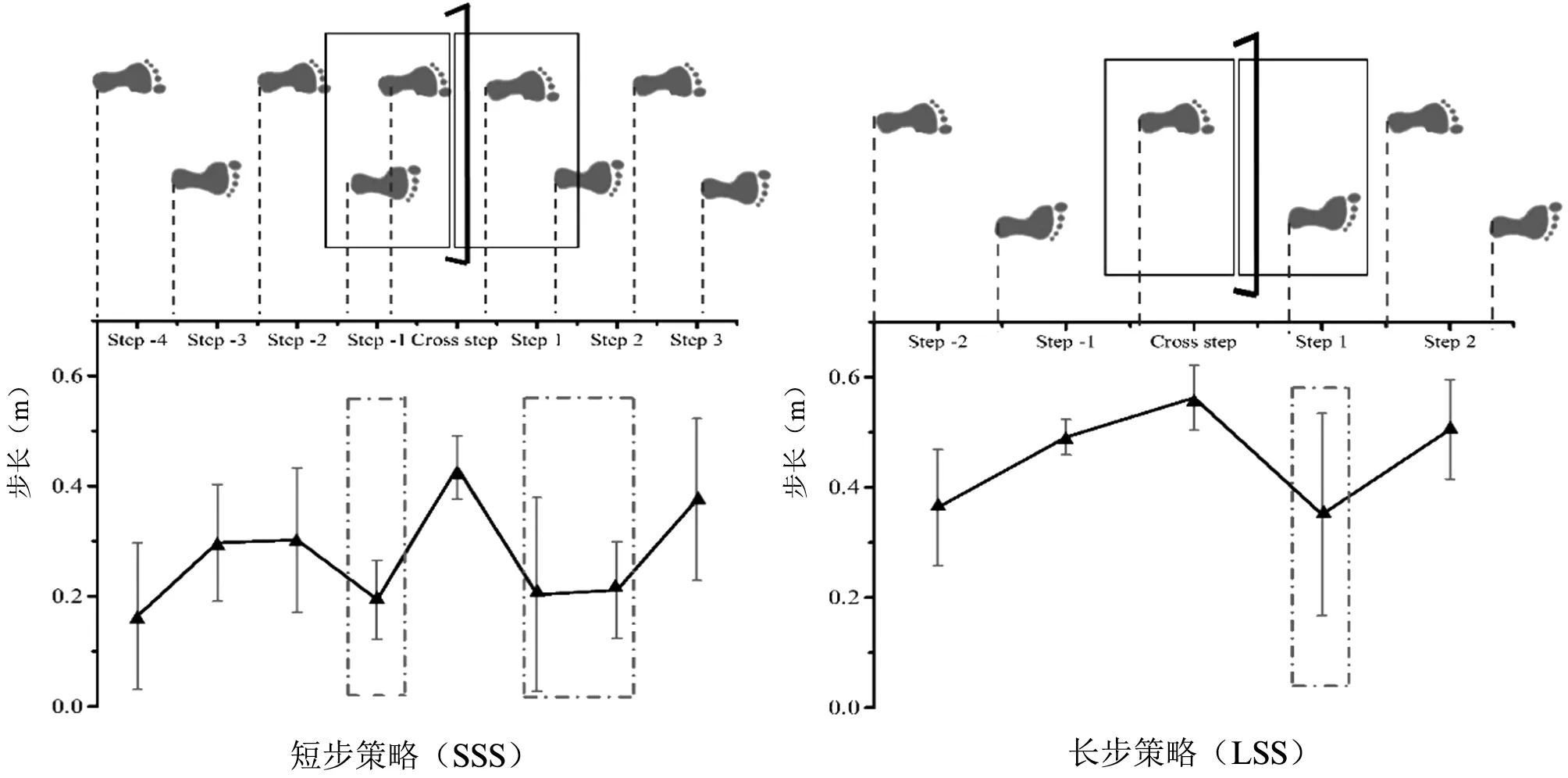
图1 卒中者跨越障碍过程中步长调整策略示意图
2 跨越障碍的运动控制策略
经过障碍物前的步态调整后,卒中者会根据任务目标和感觉输入对跨越障碍动作进行运动模式重组,以成功安全地跨越障碍[4,15]。卒中患者如何通过运动补偿来成功跨越障碍和维持平衡是目前康复生物力学领域关注的重点。厘清此问题对于理解卒中者运动控制策略和制定预防跌倒的康复方案具有重要的临床价值。
2.1 成功跨越障碍的运动补偿策略
卒中者由于肌无力和/或运动控制受损,需要通过一系列额外的环节运动以补偿其异常的下肢运动。对卒中者跨越障碍运动控制策略的研究结果进行梳理后发现,目前所认同的策略包括残余膝屈策略(residual knee flexor strategy,RKFS)[3,14,17]、髋屈曲策略(hip flexion strategy,HFS)[3]、髋抬高策略(hip elevation strategy,HES)[3]、骨盆躯干联合运动策略(trunk and pelvic couple movement strategy,TAPCMS)[4,16-17]、髋外展策略(hip abduction strategy,HAS)[4,7,13-14]、骨盆前倾策略(pelvic anterior strategy,PAS)[7]、骨盆后倾策略(pelvic posterior strategy,PPS)[13]以及骨盆侧倾策略(pelvic tilt strategy,PTS)[14]。见表1。
表1 卒中患者跨越障碍研究文献
从当前文献研究结果综合来看,各个策略并非单独存在,而是与其他策略一起共同作用,促使卒中者成功跨越障碍。运动控制策略的产生更多的是基于患者自身功能水平的自主选择,不同策略的研究纳入受试者的功能基线相差较大。如Maclellan 等[3]纳入的为后遗症期卒中者,由于患侧运动功能逐渐恢复,卒中者采用的为屈膝屈髋和髋抬高的联合策略。而Huang 等[4]纳入伴痉挛的卒中者,采用髋外展联合近端环节补偿策略。因此,不同功能水平的卒中者在面对相同运动任务时所采用的运动控制策略不同。
即使患者采用的运动控制策略不同,其目的是相同的,即在障碍前增加足廓清高度[4-5]。其中,HAS 是最先调用的运动策略,本质是为了弥补患侧膝屈肌做功的不足,增加廓清高度。研究认为,卒中者首先将重心转移至健侧,通过外展和抬高髋关节以获得足够的摆过空间[8,18]。若卒中者因患侧严重功能障碍无法有效髋外展,则通过近端环节(躯干和骨盆)的侧倾来拉动髋外展[4],提示卒中者在调用运动环节时是按照由远端至近端的顺序。此外,Han等[16]认为只有当障碍物达到一定高度(20%身高)时,近端环节补偿策略(躯干和骨盆)才明显表现出来,这表明近端环节补偿是卒中者在面对复杂任务时不得不采取的措施。较为有趣的是,Huang 等[4]研究发现,伴随痉挛的卒中者虽然采用近端环节补偿联合髋外展的运动策略成功地跨越了障碍,但跨越过程是以牺牲内外侧平衡为代价,即过多调用近端环节可能会增加跌倒风险。
综合来看,运动控制策略的选择使用与卒中者功能水平紧密相关,当调用近端环节用以增加下肢摆过空间时跌倒风险较大。
2.2 平衡维持策略
在卒中者调用环节补偿跨越障碍中,支撑腿如何维持平衡也是研究重点,确定支撑腿的平衡维持策略有助于降低跌倒风险。当卒中者通过近端环节侧倾和髋外展将身体重心转移至健侧时,健侧下肢需要增加肌肉激活程度来对抗重力以维持平衡[4]。研究发现,卒中者不仅患侧肢体存在运动功能障碍,健侧肢体也会产生本体感觉和肌肉力量的衰减[19-20]。目前仅有极少量的文献针对健侧支撑平衡进行了研究,结果显示健侧肢体通过增强膝关节和踝关节主动-拮抗肌共收缩来增加下肢刚度和关节稳定性,进而维持平衡[21-22]。部分学者认为,主动-拮抗肌共收缩增强是脑损伤后神经肌肉代偿和优化作用的体现,以弥补肌肉功能减退而衍生的运动控制策略[22-23]。此外,Hu等[24]研究发现卒中患者康复过程中主动-拮抗肌共收缩指数随着运动功能的改善而降低,这在一定程度上明确了运动功能和共激活的关系。从临床康复视角出发,健侧肢体也是需要着重关注的方面,增加健侧肢体力量和运动控制对于预防跌倒至关重要。
3 康复应用
通过生物力学手段理解卒中者跨越障碍的运动控制策略,对于临床康复方案和预防跌倒方案的制定具有启示作用。
3.1 肌力强化训练
肌无力是卒中者最为常见的功能障碍类型之一。研究发现,卒中者跨越障碍时下肢肌力与步行速度呈正相关,而与跌倒发生率呈负相关[2,12]。在跨越障碍患侧摆动阶段,虽然患侧肢体肌力不足,但仍然存在少量的膝关节残余控制[14]。这暗示临床康复需要特定的肌肉强化和物理刺激来提升患侧肢体的残余控制,从而增加足廓清。此外,因健侧肌力衰减而衍生的共收缩策略有助于维持健侧肢体平衡,但共收缩会影响运动表现,产生肌肉疲劳。因此,健侧肌力训练也应该被重视。
3.2 躯干控制训练
近端环节代偿(躯干和骨盆)是卒中者面对复杂运动任务时常采用的重要补偿策略。研究表明,在早期的运动学习和平衡发展阶段,限制躯干运动有助于提高平衡能力,但当躯干必须对外界干扰做出应对时,跌倒风险可能会增加[25]。此外,Shin 等[26]的研究也指出,躯干控制能力较好的患者跌倒风险较低,且躯干控制和动态平衡密切相关。可见,在康复早期进行躯干稳定性和控制性练习、增强核心肌力可能对促进卒中患者康复和预防跌倒发挥重要作用。此外,最新研究表明将姿势控制与认知功能训练相结合可显著改善脑卒中者平衡功能和日常生活能力[27],提示多层面的联合康复技术可能对于卒中康复更为有效。
3.3 时间约束下的跨越障碍训练
在线修改运动控制策略或运动计划,是卒中者维持平衡、完成运动任务和回归社会的关键所在。本文纳入的跨越障碍研究均为无时间约束的实验设计,即便如此依然发现卒中者采用了一系列的调整和补偿策略。研究认为,增加时间约束会导致运动控制难度进一步增加,有助于优化运动控制策略和提升控制能力[4]。因此,建议临床康复中增加有/无时间约束的跨越障碍练习,以提升卒中者在线修改运动控制策略的能力。
4 总结
本文系统梳理了卒中者跨越障碍的运动控制策略,包括障碍前的步态调整、障碍中的运动补偿及平衡维持策略。策略的选择与功能水平紧密相关,调用近端环节虽有助于增加下肢摆过空间,但也增加了跌倒风险。基于此运动控制策略,提示临床康复应注重健/患侧肌力强化、增强躯干控制和康复在线修改运动计划。迄今为止,关于卒中者跨越障碍的策略研究多集中于跨越过程,对于障碍后的平衡控制和步行模式的重新恢复却未得到明确。此外,跨越障碍研究纳入的受试者基线水平相去甚远,以至于结果缺乏可比性。未来研究有必要纳入大范围的卒中患者,通过生物力学和脑科学手段(如近红外),明确功能障碍程度和运动控制策略选择之间的映射关系,并从脑科学出发确定不同策略选择时脑激活模式的差异,以期为临床康复提供更为精确性的指导建议。