高速电机的转子损耗分析与无位置传感器矢量控制方法的研究
2022-06-05陈学永李朝江杜静娟吕海英黄新雨
陈学永,李朝江,杜静娟,吕海英,黄新雨
(1.天津大学内燃机研究所,天津 300072;2.天津城建大学控制与机械工程学院,天津 300384;3.天津农学院工程技术学院,天津 300384)
近年来随着智能建造技术的发展,高速永磁同步电机HSPMSM(high speed permanent magnet synchronous motor)由于具有高效率和高功率密度的特点而被广泛应用于污水处理中的鼓风机驱动等领域。然而,HSPMSM需要考虑多种因素,如功率损耗、热分布、永磁退磁、控制方式和转子动力学等[1]。文献[2]以“一”型和“V”型2种不同磁极结构的35 kW永磁同步电机为研究对象,在永磁体总量和磁极分块相同的情况下,利用有限元法与解析法,分析了“一”型和“V”型转子在弱磁时磁钢表面的磁通和变化情况,分析了不同磁钢结构电机在同等的弱磁、不同转速、不同弱磁超前角和不同Id电流时的转子磁钢涡流损耗和特点,得出在弱磁条件下“V”型结构的磁钢涡流损耗大于“一”型结构的结果;文献[3-4]的研究结论为相关电机的结构优化设计提供了参考依据。因此,转子损耗是电机设计的关键部分。文献[5-6]研究结果对使用非晶态金属定子铁心与钛合金外壳的高速电机设计和优化具有一定的指导意义;文献[7]对具有集中绕组的高速永磁同步电动机在大范围调速内的转矩质量和磁阻损耗进行了优化,通过建立高速永磁电机的损耗模型,对其进行了退磁分析;文献[8]的改进模型考虑了谐波和旋转磁场的影响,实现了铁损的高精度估计。此外,高频永磁同步电机的涡流损耗主要是由谐波和高转速引起的,从而导致转子温度过高。文献[9-10]对3种不同护套材料下的永磁同步电动机转子涡流损耗进行了研究和分析。这种差异有助于选材的选择;文献[11]为了削弱滑模控制中的抖振现象,提高永磁同步电机的无位置传感器矢量控制性能,提出了一种改进型滑模观测器;文献[12]提出一种适用于高铁牵引系统优化同步调制区的内置式永磁同步电机无位置传感器控制策略。因此,在HSPMSM中应充分考虑转子损耗,研究如何降低损耗和相应的控制方法。
本文研究了一种应用于鼓风机中功率55 kW、转速18 000 r/min的高速永磁同步电机。采用有限元分析方法计算了电机在不同转速情况下的涡流损耗。为了防止电机转速过高导致磁钢退磁,本文通过有限元法对转子的护套材料、护套厚度进行合理的选择,对不同护套的厚度进行分析,以降低电机高速状态下产生的损耗,防止电机温度过高导致永磁体退磁,保证电机的安全稳定运行。对自适应滤波器与滑模观测器进行了分析,选用一种自适应滤波滑膜观测器对HSPMSM进行控制。最后,通过高速电机的实验验证温度仿真结果的精确性。
1 高速永磁同步电机结构
本文设计了一种功率55 kW、转速18 000 r/min的瓦片形高功率永磁同步电机,其结构包括电机定子、复合转子、机壳等。电机设计为4极24槽结构,定子铁心由0.2 mm的低损耗硅钢片组成。电机的主要参数如表1所示。

表1 电机的基本参数Tab.1 Basic parameters of motor
由于此电机额定转速较高,对电机转子强度有较高的要求,本文提出一种新型的含极间填充块的高速HSPMSM转子结构。转子由磁钢、填充块、非导磁金属护套与转子铁心组成,磁钢采用钕铁硼N35UH,耐温180℃,转子截面如图1所示。其中永磁体为瓦片形结构,与永磁体配合使用过盈量安装在转轴表面的4部分即为填充物,其材料使用DW35硅钢片叠压制成。其中,填充块与永磁体具有相同的内径、外径。HSPMSM在此新型结构的影响下,利用填充块与磁钢之间的过盈量配合安装来增加磁钢的预压力,从而提高HSPMSM转子的松脱转速。

图1 高速电机的新型转子结构Fig.1 Novel rotor structure for high-speed motor
由于转子的护套需要选择合适的材料来降低转子损耗。故在满足强度的前提下,建议采用厚度较小的护套增加气隙宽度,同时有利于减少电机正常运行时产生的涡流损耗。在理论分析与经验结合的基础上,通过对转子涡流损耗与温度场进行耦合计算,选择适合高速电机转子护套的材料与厚度,以获得更好的电机可靠性。
2 转子损耗分析
对电机绕组磁动势的特征进行分析[1],设k次谐波电流产生的v次磁动势空间谐波F(k,v),其幅值计算为

利用电机同步转速与频率之间的关系可得,在正序电流产生的v=6h+1(h=0,1,…)次的磁动势谐波与负序电流产生的v=6h-1(h=1,2,…)次的磁动势谐波共同影响下,F(k,v)相对于定子的转速为

式中:fk为k次谐波对应的频率;f1为基波频率;n1为电机额定转速。则F(k,v)相对于转子的转速为

F(k,v)相对于转子的交变频率为

在负序电流产生的v=6h+1(h=0,1,…)次的磁动势谐波与正序电流产生的v=6h-1(h=1,2,…)次的磁动势谐波的共同影响下,F(k,v)相对于定子的转速为

F(k,v)相对于转子的转速为

F(k,v)相对于转子的交变频率为

式中,负号是为了区分磁动势谐波转向与转子转向的不同。
根据上述理论分析可知,由于转子护套会影响电机正常运行时的气隙磁密,故在选择不同厚度的转子护套时,F(k,v)会随之改变。故本节分别在护套厚度为2.0、2.5、3.0、3.5 mm时,通过有限元法对电机额定运行时的定子损耗进行计算,如图2所示,护套材料选择钛合金,转子填充物材料选择硅钢。
通过对比云图2可以看出,在不同护套厚度下,电机产生在定子上的损耗随着护套厚度的增大而增大,且在2.0~2.5 mm区间内定子损耗变化较大。综合考虑在高速运行时的转子损耗、转子强度、工艺制作等方面,故本文选定3.0 mm为应用于此款高速电机转子的护套厚度。

图2 4种不同转子护套厚度设计的损耗Fig.2 Loss of designs with four different rotor sleeve thicknesses
由于本文的研究对象具有18 000 r/min高转速与600 Hz的高频谐波率,故HSPMSM护套与填充物内的涡流损耗是转子的主要损耗。由于随着转速的增大,使得电机涡流损耗也会增大,故在HSPMSM中,涡流损耗的分析显得尤为重要。基于有限元分析的耦合场路法计算转子损耗,护套厚度3.0 mm的计算结果云图如图3所示。

图3 转子有限元损耗模型Fig.3 Finite element model of rotor loss
转子护套涡流损耗分析的数学表达式为


式中:ke为涡流损耗系数;C1、C2为过程参数;μ为相对磁导率;ψ为磁链;Bδ为气隙处的磁密度;σ为漏磁系数;M为护套厚度;δ为气隙长度;r0、r1分别为气隙内径与外径;a、b、c、d0、d1分别为转轴外径、永磁体外径、护套外径、填充物内径、填充物外径;填充物厚度与永磁体厚度相同,故两者都用H表示;L为永磁体长;Q为定子槽数;ω为转子角速度;Peddy为涡流损耗产生的功率。
3 护套材料对转子损耗的影响
护套材料是影响电机的整体性能的一个很重要的因素。针对碳纤维、钛合金、不锈钢3种材料在不同频率下的涡流损耗进行有限元分析。分析模型参数如表2所示。

表2 转子、护套、填充物基本参数Tab.2 Basic parameters of rotor,sleeve and filler
不同护套材料在不同转速下的转子涡流损耗如图4所示。通过对3种护套常用材料的涡流损耗分析可得出结论,碳纤维在电机不同转速下产生的涡流损耗基本不发生变化,为130 W;护套的材料为钛合金时,在额定转速18 000 r/min下,电机产生的涡流损耗为290 W,且此数值会随着转速的增加而增加;对于不锈钢材料,在与上述相同的额定工况下产生的涡流损耗为508 W,数值同样会随转速升高而增大,且变化较大。故综上所述,考虑到电机在高速运行时产生的损耗、转子的散热、加工工艺及制造难度,本文选用钛合金作为高速电机护套的材料。

图4 不同护套材料在不同转速下的转子涡流损耗Fig.4 Rotor eddy-current loss of different sleeve materials at different speeds
4 无位置传感器矢量控制方法研究
由编码器捕获电机转子位置及转速信号的普通PMSM的控制系统具有明显的缺点,如降低系统的稳定性和可靠性,且编码器用于HSPMSM驱动系统时,其成本增加。因此此节对用于HSPMSM驱动系统的无位置传感器矢量控制算法进行研究。PMSM根据不同的转速,用于驱动系统的无位置传感器控制可分为2种:第1种为高频信号注入法,此控制策略适用于零、低转速PMSM;第2种为模型法,该控制策略适用于中、高转速PMSM,例如滑模观测器SMO(synovial membrane observer)法、模型参考自适应MRAS(model reference adaptive system)法和扰动观测器法等。
在各类模型法中,滑模观测器由于其具有抗扰性强、动态响应快、对自身参数变化不敏感等特点,在中、高转速工况中得到广泛应用。HSPMSM的无位置传感器矢量控制策略框图如图5所示。

图5 高速电机无位置传感器矢量控制框图Fig.5 Block diagram of high-speed motor sensorless vector control
电机在两相静止坐标系下的定子电压方程为


基于上述定子电压方程可以得到此时的定子电流观测器表达式为

由此可以估算出转子位置及速度。转子位置观测器设计如图6所示。

图6 转子位置观测器结构框图Fig.6 Block diagram of structure of rotor position observer
滑膜观测器中含有高频开关分量,需要低通滤波器LPF(low-pass filter)过滤掉高频分量,但低通滤波器的存在会产生反电动势相位推算的延迟,使滑膜观测器捕获到的转子位置产生延迟,会产生电机直流偏移的计算误差,降低捕获转子位置时的精度。
自适应同步滤波器可以有效地消除反电动势的谐波和抖振对信号测量带来的误差。其利用锁相环反馈的位置信号,自适应地消除上述因素,在此基础上输出基波反电动势。最后,利用基波反电动势和基波转速,正交锁相环计算出转子位置和速度。采用自适应滤波的转子位置观测器如图7所示。

图7 采用自适应滤波的转子位置观测器Fig.7 Rotor position observer using adaptive filtering
转子位置误差对比和转速误差对比分别如图8和图9所示。
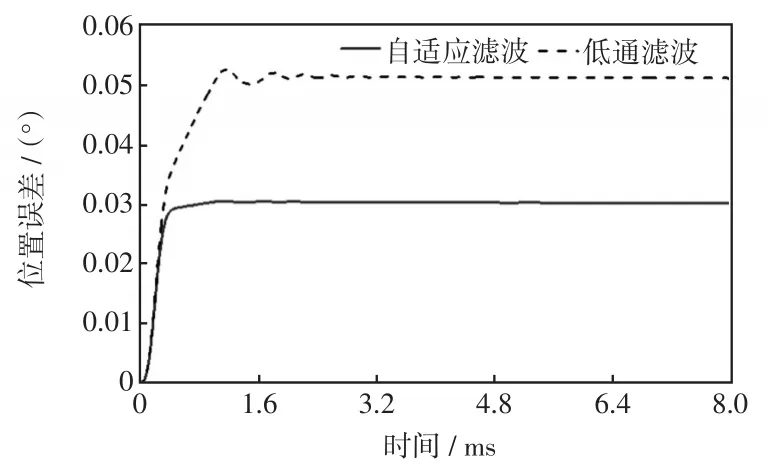
图8 转子位置误差对比Fig.8 Comparison of rotor position error

图9 转速误差对比Fig.9 Comparison of speed error
由图8和图9可以看出,采用自适应滤波滑模观测器稳态精度高,超调很小。以往的滑模观测器虽然加上了LPF,但超调量很大。两种观测器速度跟踪性能都能满足要求,但自适应滤波滑膜观测器误差更小。
5 实验验证
通过对3.0 mm护套厚度的HSPMSM进行温升测量实验,对上述有限元损耗计算结果进行验证。首先利用有限元法计算电机在额定工况下电机产生的涡流损耗,然后将损耗结果加载至温度场内进行磁热多物理场耦合仿真,由此可以得到HSPMSM在额定工况下运行时的温度分布。在得到有限元计算结果后,对电机进行温升实测实验以验证耦合仿真的精确性。该鼓风机的高速电机的测试平台是负载测试,负载为鼓风箱,如图10所示,该测试设备包括数字电桥、功率分析仪等。

图10 鼓风机高速电机的测试平台Fig.10 Test platform of high-speed blower motor
通过对HSPMSM磁热耦合有限元计算结果的分析可知,由于电机高速的特点,且转子具有护套,高速电机主要热源分布在定子铁心、转子护套上。此种情况会导致永磁体温度较高,导致退磁。磁热耦合的仿真结果如图11所示。

图11 温度分布有限元计算结果Fig.11 Finite element calculation results of temperature distribution
利用上述实验台架对高速电机进行温升测量实验,本文通过电阻法测试间接得出绕组平均温度。电机运行前在20℃下测试电机的绕组的电阻Rs20,当电机额定负载稳态运行120 min后,停机后数字电桥测试绕组当前温度下的电阻Rsθ,通过电阻折算公式计算绕组的平均温度θ。折算公式为
同时,通过测温枪对稳态运行时的机壳进行温度记录。有限元计算和实验数据如表3所示。

表3 电机温升实验与有限元计算结果Tab.3 Results of motor temperature rise experiment and finite element calculation ℃
由于温升测量实验无法精确测量出电机磁钢与护套位置的温度,故本文使用推算法,通过将电机机壳与绕组温度有限元计算结果与实测结果进行比较,确定电机转子相关位置的温升分布。通过实验结果与有限元计算结果对比计算可以看出,HSPMSM在额定工况下运行时,有限元计算结果的绕组温度为109.11℃,实验测量的绕组最高温度为115.45℃,误差为5.4%。故可以确定,HSPMSM转子磁钢与护套位置的温度分别为144.89℃与136.12℃。
通过计算与测量结果可以得出,当电机选择3.0 mm钛合金转子护套、磁钢采用永磁体N35UH、耐温180℃时,保证电机运行安全,不会出现磁钢退磁的情况。
6 结论
本文针对鼓风机中的高速永磁同步电机,提出了一种新型转子结构,并对HSPMSM控制方法进行研究。通过对转子进行有限元损耗计算,结合温度场分析,选择合适的护套与增加磁钢填充物,以保证在电机高速运行时鼓风机的安全。结论如下。
(1)高速永磁同步电机转子护套与填充物的设计,有利于提高磁钢的松脱转速。
(2)对于磁钢护套材料的选择,钛合金能增大转子工作强度。同时,在电机额定工况下,从工艺与损耗计算综合考虑不锈钢、碳纤维、钛合金3种材料,选择钛合金作为高速永磁同步电机的护套材料。
(3)合理地选择护套厚度,可以提高转子的稳定性。通过降低电机护套的涡流损耗,降低HSPMSM在高速运行时转子的温度,保证磁钢不会产生退磁现象。本文研究的电机最优护套厚度为3.0 mm。
(4)相较于低通滤波滑膜观测器来说,采用自适应滤波滑模观测器观测输出信号具有稳态精度高、超调很小的优势,并且不会有估计反电动势相位延迟以及产生直流分量的问题。对于电机控制精度有要求的场合,应优先考虑使用自适应滤波滑膜观测器来输出观测信号。
